











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
La regulación de frecuencia busca, a través de mecanismos de control y reservas de generación disponibles, responder en forma adecuada a las exigencias del sistema eléctrico y corregir así, las variaciones de frecuencias que surgen como producto del desbalance de generación y carga. Por lo tanto, la capacidad de regular la frecuencia y mantenerla dentro de ciertos límites otorga mayor seguridad, rigidez y control sobre la operación del sistema. Bajo este contexto, es necesario el desarrollo de metodologías que incluyan un adecuado protocolo de pruebas para verificar la respuesta rápida y precisa de los equipos de control potencia - frecuencia, tales como los reguladores de velocidad, también conocidos como gobernadores [1].
Los gobernadores permiten una regulación automática de la producción de los generadores (potencia mecánica) para equilibrar los requerimientos variables del consumo (potencia eléctrica). A esta regulación se la denomina Regulación Primaria de la Frecuencia (RPF). Para que esta regulación sea efectiva, los generadores que regulan deben ser despachadas por debajo de su carga máxima y así disponer de un margen de potencia con respecto a su potencia máxima denominada Reserva Rotante [2].
Adicionalmente, las unidades de generación deben disponer de gobernadores bien sintonizados y modelados, tal que su respuesta permita una regulación adecuada de la frecuencia, cumpliendo con los requerimientos internacionales y códigos de red nacionales; así como un modelo matemático validado con el objetivo de realizar estudios de planificación y operación que representen el comportamiento real del generador y su regulador de velocidad
En este sentido, en [3] se ha desarrollado un procedimiento de pruebas para obtener modelos de gobernadores precisos de centrales de generación hidroeléctricas de Nueva York. El objetivo es mejorar la precisión de las simulaciones dinámicas del sistema eléctrico. En [4] se presenta las pruebas y modelado de controles de generadores en el sistema hidroeléctrico de Ontario considerando un análisis completo de las normas NERC. Además, en [5] se describen las pruebas y la puesta en marcha de los gobernadores de turbinas de gas para rendimiento en modo isla, basados en el cumplimiento de la NERC y la WSCC. Por último, en [6] se presentan dos ejemplos de pruebas y modelado de reguladores de turbinas de gas, adicionalmente, se validan los modelos donde los resultados simulados compaginan con los datos medidos.
Estas pruebas se han realizado en unidades analógico-electrónicas antiguas y en unidades digital-electrónicas nuevas. Las metodologías para realizar las pruebas de los gobernadores dependen del progreso de la tecnología, tanto de los reguladores de velocidad como de los equipos de medición y registro. Sobre esta base, la Subgerencia Nacional de Investigación y Desarrollo (SID) del Operador Nacional de Electricidad CENACE desarrolló un novedoso protocolo de pruebas y metodología para validación y sintonización de reguladores de velocidad, basado en la nueva tecnología de adquisición de datos WAMS de CENACE. Este protocolo de pruebas y metodología fue aplicado con gran éxito en la central hidroeléctrica Delsitanisagua, donde se considera el cumplimiento de normativa de códigos de red internacionales. Adicionalmente, se presenta la identificación paramétrica del modelo del regulador de velocidad en PowerFactory de DIgSILENT.
A continuación, en el segundo acápite se presenta la importancia y clasificación de la regulación de frecuencia. En el tercer acápite se presenta la metodología de análisis de pruebas e identificación paramétrica. En el cuarto capítulo se detalla el protocolo de pruebas y conexión de equipos. Posteriormente, en el quinto acápite se discuten los principales resultados y se analiza el cumplimiento de la normativa; para luego en sexto capítulo realizar la identificación paramétrica del sistema de control. Finalmente se presentan las conclusiones y recomendaciones.
REGULACIÓN DE FRECUENCIA
Uno de los elementos clave para garantizar un funcionamiento seguro y estable de los sistemas eléctricos de potencia es el equilibrio entre la generación y la demanda. La mayor consecuencia en un sistema de potencia ante un “exceso/déficit” de generación es el efecto en la frecuencia del sistema. Por esta razón, el problema relaciona el control frecuencia-potencia, el cual debe conseguir que:
Se mantenga el equilibrio entre generación y demanda.
Se mantenga la frecuencia de referencia en el sistema.
Se cumplan los compromisos de intercambio de energía con las áreas vecinas.
Se mantenga la suficiente potencia/energía de reserva.
Para cumplir estos objetivos, como se muestra en la Figura 1, el control frecuencia-potencia se organiza en tres niveles: primario, secundario y terciario. Cada uno de los niveles opera en un margen de tiempo e involucra un conjunto de variables.
El control primario es el más rápido, operando en un margen de tiempo de hasta 30 segundos. El propósito es limitar la desviación de la frecuencia tras una contingencia [7], recuperando el balance entre carga y generación del sistema, ubicándolo en un nuevo punto de operación en estado estable.
La respuesta primaria proviene de la inercia de los generadores, el amortiguamiento de las cargas (motores), los reguladores de velocidad (Gobernadores), y otros dispositivos que proveen respuesta inmediata como un BESS (Battery Energy Storage Systems). En los instantes iniciales, tras producirse un desbalance de potencia, la tasa de cambio de la frecuencia ROCOF (Rate of Change of Frequency) y el punto más bajo de la frecuencia alcanzado NADIR están determinados principalmente por la magnitud del desbalance, la inercia total del sistema y por dispositivos de respuesta rápida como el BESS [8].
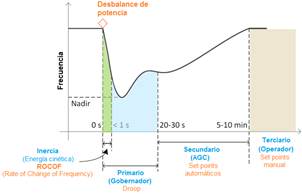
El control secundario opera en un margen de tiempo de entre 30 segundos y 10 minutos. Actúa en el ámbito del área de control, atendiendo a la frecuencia y al intercambio de potencia con las áreas vecinas.
El control terciario opera en un margen de tiempo superior a 10 minutos. Actúa en el ámbito de un sistema eléctrico extenso, buscando un reparto de cargas optimizado que asegure suficientes reservas de energía.
PROPUESTA METODOLÓGICA
En la Figura 2 se presenta el diagrama de flujo con la metodología de pruebas e identificación paramétrica de sistemas de control.
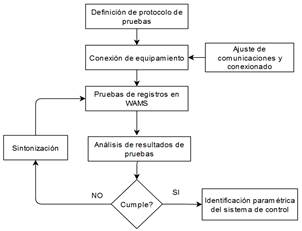
En primera instancia, en la metodología se define un protocolo de pruebas y conexión de equipos considerando los materiales y equipamiento disponible por personal de la central y del CENACE. Adicionalmente, se verifican permisivos de control, parametrización inicial y pruebas de registros del sistema WAMS con la finalidad de identificar restricciones en el registro adecuado de las pruebas y ajustar los sistemas de comunicación y conexionado.
Posteriormente, se realizan las pruebas para la verificación de la capacidad de respuesta de la potencia activa ante variaciones de la frecuencia. En este sentido en la Figura 3 se presenta la característica de Regulación Potencia-Frecuencia (RPF), donde se observa las principales particularidades que la caracterizan.
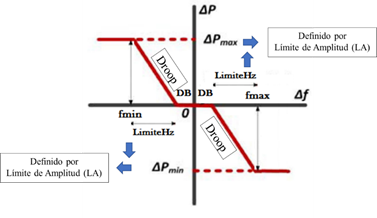
El estatismo (droop en inglés) es la característica técnica de una planta y/o unidad de generación que determina la variación porcentual de la frecuencia por cada unidad de variación porcentual de potencia de respuesta. La Banda Muerta (Dead Band, DB) es el rango de frecuencia del sistema dentro del cual las unidades de generación no varían automáticamente su potencia. Adicionalmente, se observa el Límite de Amplitud que se caracteriza por limitar el incremento o decremento de entrega de potencia del regulador de velocidad, dado un evento de frecuencia[9]. Es importante destacar que, el Límite de Amplitud define los límites máximos y mínimos de frecuencia entre los cuales el regulador de velocidad aportará a la RPF
Para el análisis de resultados se considera el cumplimiento de la normativa internacional citados en la mayoría de los códigos internacionales [9], [10] y [11], resumido a continuación:
Estatismo: ajustable en el rango de 3 a 8%; en este caso se ha parametrizado en 4%.
DB: considera un rango de 0-200 mHz y, para estos ensayos se ajustada en 30 mHz.
|ΔP1|/Pmax = (ΔPmax): intervalo de respuesta a la frecuencia, donde ΔP1 es la respuesta en potencia activa esperada ante un desvío de frecuencia Δf (ver Figura 4. En este caso, se considera que el intervalo puede oscilar entre 1% y 10%.
Δf: desvío de la frecuencia f respecto de 60 Hz (Δf = f - 60).
ΔP: respuesta en potencia activa esperada ante una Δf calculada a través de la siguiente ecuación:

Fuente: [11]
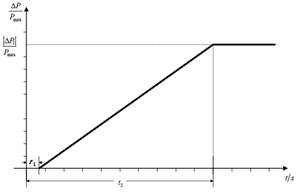
Retraso inicial (t1): tiempo de activación de la respuesta de frecuencia. Este tiempo se mide desde que se detecte un cambio de frecuencia hasta cuando se produzca una variación del 1% del ΔPensayo. En este caso se considera que el valor de t1 debe ser menor a 2 seg.
Tiempo de activación total (t2): tiempo de activación de la respuesta de regulación un cambio de frecuencia Δf del cual se espere una respuesta igual a |ΔP1|/Pmax (incluyendo el retraso inicial t1). A efectos de la determinación del t2 se considerará el tiempo correspondiente al último valor de P que entra dentro de la banda ±1% de Pmax alrededor de |ΔP1|/Pmax. Se considera que el valor de t2 debe ser menor a 30 seg.
Por último, en base al análisis de resultados de las pruebas y las restricciones identificadas que limitan la correcta actuación del regulador de velocidad se realiza, de ser necesario la adecuada sintonización. Caso contrario se procede a la identificación paramétrica del regulador de velocidad empleando la herramienta y metodología diseñada en [12], [13] y [14].
Esta herramienta y metodología considera las recomendaciones dadas por la Corporación de la Confiabilidad Eléctrica de América del Norte (NERC, por sus siglas en inglés) en el documento “Reliability Guideline Power Plant Dynamic Model Verification Using PMUs” [15]. La herramienta se basa en un método de optimización que minimiza el error cuadrático medio (MSE, por sus siglas en inglés) entre las señales de pruebas de campo y las respuestas obtenidas en simulación [14].
APLICACIÓN DE LA METODOLOGÍA EN LA CENTRAL HIDROELÉCTRICA DELSITANISAGUA.
En la Figura 5 se presenta la frecuencia del S.N.I. y la potencia activa de una unidad de la central Delsitanisagua, ante un evento suscitado en el sistema eléctrico colombiano y registrado por el sistema WAMS de CENACE. El evento de frecuencia corresponde a la salida de operación de la central Termo Yopal con un despacho estimado de 80 MW. Este evento provoca un desbalance de generación-carga ocasionando un decremento de la frecuencia hasta 59.75 Hz (NADIR), y luego se estabiliza en aproximadamente 59.90 Hz.
Es importante resaltar que ante este evento las unidades de generación Delsitanisagua no aportan a la RPF. Se observa que, ante el decremento de la frecuencia, la unidad no incrementa su potencia activa mediante la variación de su potencia mecánica (apertura de inyectores) por actuación de su regulador de velocidad; no obstante, se aprecia el aporte de la respuesta inercial de la unidad. En este sentido, se desprende la necesidad de desarrollar, y aplicar en campo, una metodología de pruebas, parametrización y sintonización de los reguladores de velocidad.
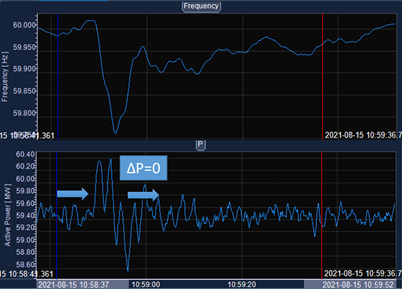
Figura 5: Respuesta de Frecuencia de una unidad de la Central Delsitanisagua previo a la intervención del regulador de velocidad
Con estos antecedentes, se plantea un plan piloto para aplicar la metodología desarrollada por la SID en la Central Hidroeléctrica Delsitanisagua de 180 MW de potencia, la cual se encuentra ubicada en la provincia de Zamora Chinchipe, cantón Zamora. Esta central cuenta con tres turbinas tipo Pelton de 60 MW, las cuales aprovechan el potencial del río Zamora, con un caudal medio anual de 47,3 m3/s aprovechables para su generación [16].
Protocolo de Pruebas y Conexión de Equipos
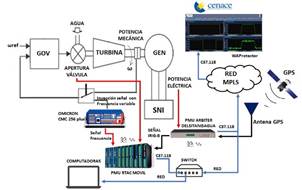
En la Figura 6 se presenta la conexión de equipos para realizar las pruebas del regulador de velocidad de la unidad 2 de la central Delsitanisagua, que involucra: 1) Señal de frecuencia inyectada mediante el equipo de pruebas OMICRON CMC 256 plus [17] y 2) el registro de la señal analógica medida (apertura de válvulas) por medio de un controlador de automatización en tiempo real RTAC SEL-2240 configurado como PMU RTAC móvil [18]. Adicionalmente, esta PMU permite el registro de la señal inyectada por el OMICRON CMC 256 plus.
El objetivo principal es observar el comportamiento del sistema “Generador-Regulador de Velocidad” respecto a variaciones controladas de frecuencia. Para ello, se inyecta una señal de voltaje con frecuencia variable directamente en el módulo del regulador, reemplazando la señal de frecuencia del sistema proveniente del transformador de potencial conectado al voltaje terminal de la unidad. La estimación de los sincrofasores de voltaje y corriente, así como el cálculo de potencia activa de la unidad de generación son registrados con la PMU existente en la unidad 2 de la marca Arbiter Modelo 1133A Power Sentinel. Todos estos equipos se conectan directamente con el sistema WAMS de CENACE, WAProtector [19], para su almacenamiento, sincronización y análisis a través de los despliegues diseñados en la interfaz gráfica realizada para las pruebas.
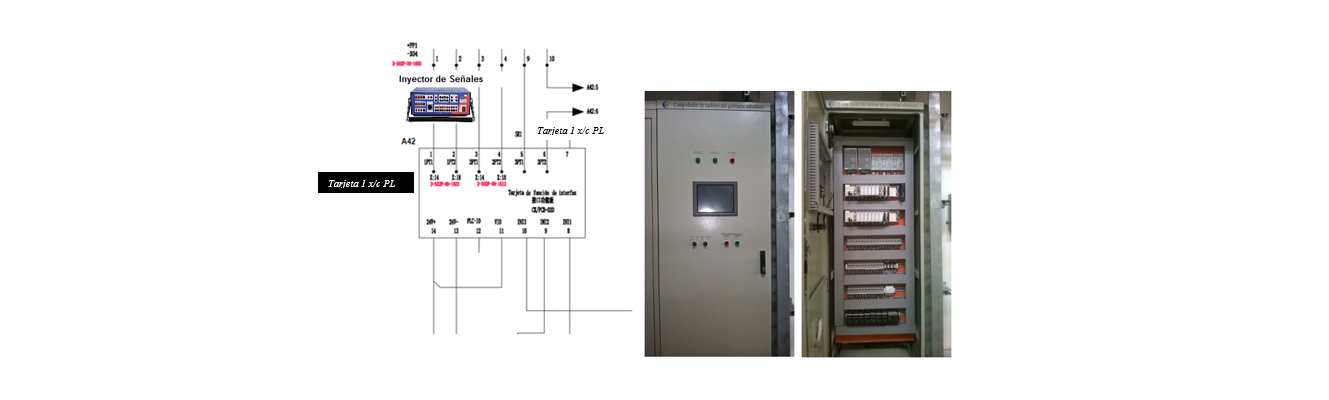
En la Figura 7 se presenta el esquema de conexión de la maleta de inyección de señales, OMICRON CMC 256 plus, a la tarjeta 1 x/c PLC del regulador de velocidad de la unidad de generación. En este proceso de conexión de equipos se debe realizar:
La verificación de la disponibilidad de señales de sincronización y de acceso a la red de PMUs de CENACE. En este punto, es importante la disponibilidad de una salida configurable IRIG-B y un punto de acceso a la red MPLS de PMUs.
La instalación y configuración de un switch auxiliar para acceso de equipos, inyector y computadores a la red de PMUs y del sistema WAMS (WAProtector) de CENACE.
La instalación, conexionado, sincronización y programación del equipo PMU RTAC (móvil) destinado a la adquisición de la frecuencia y la entrada analógica de apertura de inyectores.
La instalación y conexionado del equipo de pruebas OMICRON CMC 256 plus, destinado a la inyección de la señal para la variación de frecuencia en el regulador de velocidad.
La configuración de pruebas en software de gestión del equipo inyector OMICRON CMC 256 plus.
La configuración de la PMU RTAC en el sistema WAProtector de CENACE.
Pruebas y Resultados
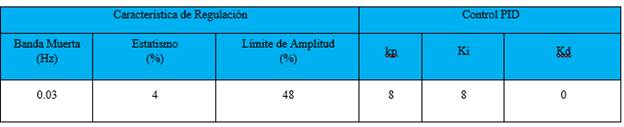
En la Tabla 1 se presentan los parámetros del regulador de velocidad de los generadores que definen la característica de regulación y fueron ingresados en sitio; y, además se muestran las ganancias del control PID (Proporcional-Integral-Derivativo) que definen los tiempos de la respuesta de regulación y que se encuentran parametrizadas por el fabricante. Estos parámetros junto con la programación del PLC permitieron obtener resultados coherentes de la actuación del regulador de velocidad y, con base a éstos se realiza el análisis de resultados, cumplimiento de normativa y validación del modelo de control.
Pruebas de Campo
Las pruebas fueron realizadas en una unidad de generación, la cual permitía el conexionado fiable de los materiales y equipos. Considerando diferentes despachos se realizaron variaciones de frecuencia para registrar la respuesta de la potencia activa.
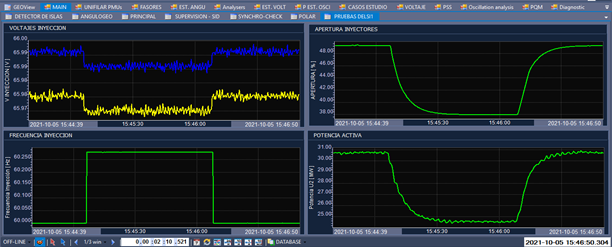
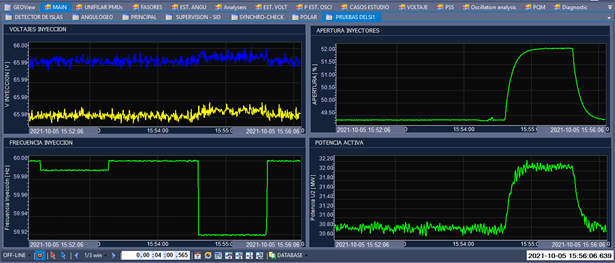
En la Figura 8 se presenta la respuesta de la unidad 2, despachada con aproximadamente 30 MW, ante un incremento de frecuencia de 0.27 Hz. Se pueden observar las variables registradas por el sistema WAMS como voltaje (V) y frecuencia (Hz) de inyección, apertura de inyectores (válvulas) (%) y potencia activa eléctrica (MW). La señal de inyección se compone de una magnitud de voltaje con una frecuencia, la cual se modifica para provocar las variaciones.
Con el incremento de frecuencia de 0.27 Hz se observa una correcta actuación del regulador, puesto que disminuye la potencia de salida de 30.73 MW a 24.62 MW, cuyo estatismo equivale a 3.93% (valor muy cercano al valor parametrizado de 4%).
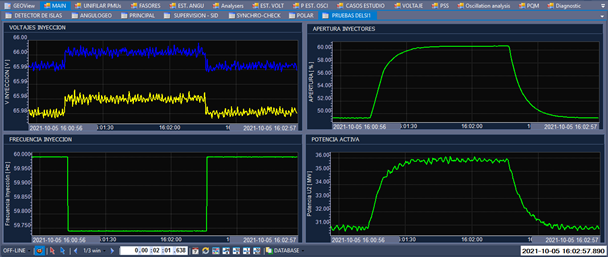
Por otro lado, en la Figura 9 se presenta la prueba con un decremento de frecuencia de 0.27 Hz, donde se observa una correcta actuación del regulador de velocidad, puesto que, ante el decremento de frecuencia, la unidad de generación aumenta su potencia de salida desde 30.71 MW hasta 35.87 MW, cuyo valor corresponde a un estatismo de 4.65%.
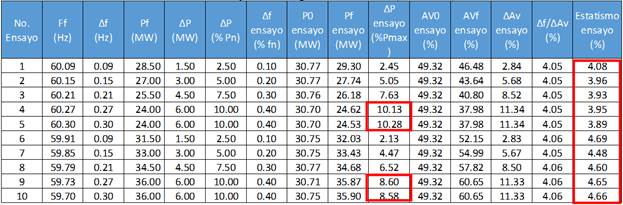
En la Tabla 2 se presenta los resultados de las pruebas con despacho aproximado de 30 MW, correspondiente a una operación con 4 válvulas, donde se observa que el estatismo se encuentra alrededor del 4% a 4.6%. Los ensayos No. 5 y No. 10 corresponden a pruebas fuera del rango mínimo y máximo de frecuencia (dado por el Límite de Amplitud), en estos casos, el aporte a la RPF no se incrementa (valor saturado).
Es importante destacar que, la respuesta de las válvulas (apertura y cierre) es uniforme ante una misma variación de frecuencia, por ejemplo, el ensayo No. 4, correspondiente a incremento de 0.27 Hz, cuenta con una apertura de válvulas de 11.34%; el mismo caso sucede en el ensayo No. 9 correspondiente a un decremento de 0.27 Hz de frecuencia, donde las válvulas se cierran en 11.33%.
En base a esto se calculó el porcentaje de variación de frecuencia en función de la apertura/cierre de válvulas, considerando que la apertura máxima de las válvulas es del 87% (valor indicado por el fabricante); en este caso, la relación variación de frecuencia versus variación de apertura de válvulas corresponde a valores de 4% (estatismo parametrizado en el regulador).
Sin embargo, la respuesta de estatismo calculado en base a la variación de Potencia no es uniforme, por ejemplo, como se puede observar en la columna Estatismo ensayo (%), para variaciones de frecuencia por encima de la frecuencia nominal, el estatismo corresponde a aproximadamente 4%; mientras que para variaciones de frecuencia por debajo de la nominal el valor de estatismo corresponde a aproximadamente 4.6%.
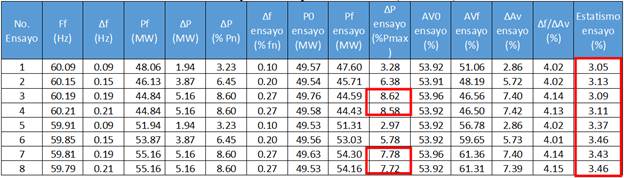
En la tabla 3. se presenta los resultados de las pruebas con despacho de 50 MW, correspondiente a una operación con 6 válvulas. En este caso se observa que el estatismo se encuentra entre 3% y 3.5%; sin embargo, la relación de variación a frecuencias versus la apertura/cierre de válvulas corresponde a un valor de 4% (estatismo parametrizado en el regulador).
*AV0(Apertura de válvulas (inyectores) inicial
**AVf(Apertura de válvulas (inyectores) final
Características de regulación
De las pruebas realizadas y en base a la lógica del PLC, el regulador de velocidad deberá presentar dos curvas características de Regulación de Potencia - Frecuencia, cuyos resultados se muestran en la Tabla 4. Por lo tanto, las curvas de regulación son función del número de inyectores:
Con 4 inyectores por generador (Rango de potencia entre 22 y 42 MW): el estatismo corresponde a aproximadamente 4%;
Con 6 inyectores por generador (Rango de potencia entre 42 y 60 MW): el estatismo corresponde a aproximadamente 3%.
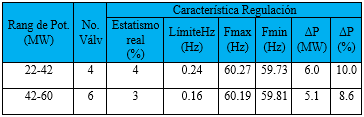
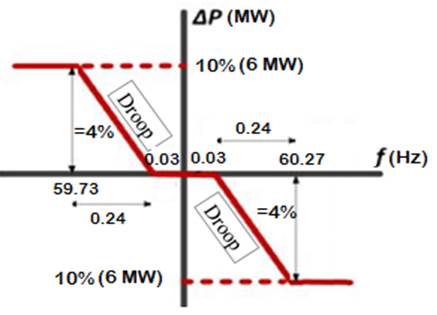
La variación de potencia máxima (aporte a la RPF) es función del Límite de Amplitud (LA) y del número de válvulas en operación. Como se observa en la Figura 10, con 4 inyectores se registra un aporte máximo a la RPF de aproximadamente 10% (6 MW); mientras que, para despachos mayores de 42 MW con 6 inyectores el aporte máximo a la RPF es del 8.6% (5.1 MW).
Es importante notar que, con el valor definido de Límite de Amplitud, ante un evento de frecuencia que sobrepase los límites máximo y mínimo de frecuencia, la variación máxima de potencia que entregan los generadores corresponde a los valores antes mencionado. Por lo tanto, en caso de requerirse menor o mayor aporte de potencia será necesario definir un nuevo LA.
Banda Muerta
En la Figura 11 se muestra la prueba en campo para verificar la actuación del regulador con variaciones de frecuencia dentro de la banda muerta. En esta figura se observan dos ensayos correspondientes a la variación de frecuencia dentro de la banda muerta y otro fuera de la banda muerta. Se observa que la actuación del regulador es correcta al actuar únicamente ante el ensayo con variación de frecuencia mayor a 30 mHz (valor parametrizado en el regulador de velocidad).
Tiempos de actuación e intervalo de respuesta a la frecuencia
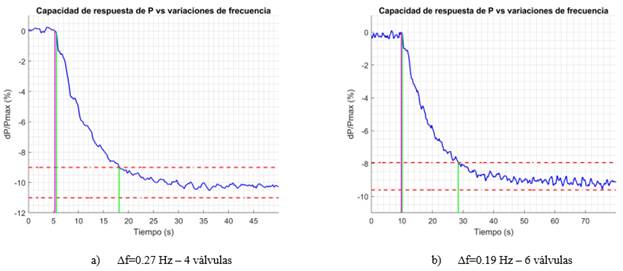
En la Figura 12 se muestra la capacidad de respuesta de los reguladores de velocidad para despachos con 4 y 6 válvulas. En estas figuras se muestra que:
|ΔP1|/Pmax disminuye ante el evento de incremento de frecuencia hasta -10%, conforme lo especifica característica de regulación con 4 inyectores (ver Tabla 4). El tiempo de activación t1 de la respuesta de frecuencia es menor a 1 seg.; mientras que, el tiempo de activación t2 de la respuesta de regulación a un cambio de frecuencia Δf es menor a 15 seg.
|ΔP1|/Pmax disminuye ante el evento de incremento de frecuencia hasta -8.6%, conforme lo especifica característica de regulación con 6 inyectores (ver Tabla 4). El tiempo de activación t1 es menor a 1 seg.; mientras que, el tiempo de activación t2 es menor a 20 seg.
Dado que las respuestas del regulador de velocidad con las ganancias del controlador PID (Proporcional-Integral-Derivativo) que se encuentran ingresadas actualmente en el regulador de velocidad son adecuadas a los requerimientos de normativa internacional, se procede a la identificación paramétrica del modelo.
Limitadores de Apertura de Válvulas
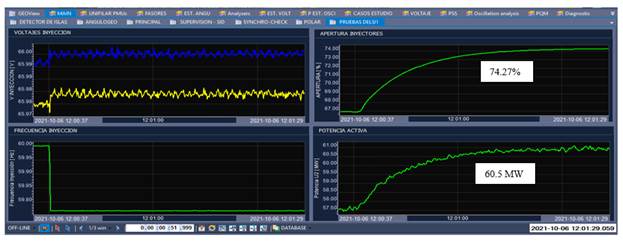
En la Figura 13 se presenta una prueba de campo para verificar los limitadores de apertura de válvulas. Para ello, se realizó una variación de frecuencia controlada que permita un aporte de potencia activa (con 6 válvulas) mayor a la potencia nominal de la unidad de generación.
En este caso, la apertura de las válvulas fue de 74.27% provocando que la potencia entregada por la unidad de generación sea mayor que la potencia nominal (60.5 MW).
Cabe indicar que el límite de apertura máxima de válvulas parametrizado por el fabricante es de 87%; por lo que, ante un evento de frecuencia con despachos cercanos a la potencia máxima y operando en modo RPF, la potencia entregada superaría la potencia nominal comprometiendo la vida útil de la máquina.
Con LA igual a 48 el aporte máximo a la RPF con 6 válvulas es de 8%; en este caso, las unidades de generación sólo podrán despacharse hasta máximo 55 MW, caso contrario se recomienda deshabilitar el modo RPF para evitar sobrepasar la capacidad máxima del generador puesto que el sistema turbina-generador-regulador no cuenta con el limitador de potencia máxima de generación. Esta recomendación debe considerarse en la planificación operativa con la finalidad de evitar la disminución de la reserva rodante del sistema ecuatoriano. En caso de requerirse menor o mayor aporte de potencia ante eventos será necesario definir un nuevo LA.
IDENTIFICACIÓN PARAMÉTRICA DEL REGULADOR DE VELOCIDAD
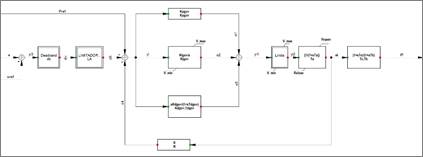
En base a todas las restricciones identificadas que limitan la correcta actuación del regulador de velocidad de la central Delsitanisagua se procedió a la construcción del modelo mediante programación DSL en PowerFactory de DIgSILENT.
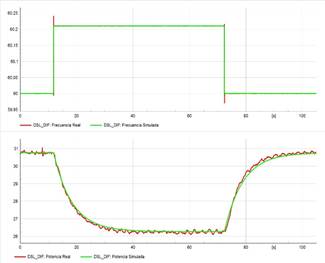
En la Figura 14 se muestra el modelo construido que cuenta con todas las particularidades del sistema de control real considerado los bloques proporcional-integral (dado que Kd es igual a cero), banda muerta, límite de amplitud, estatismo y un modelo simplificado de turbina. En la Figura 15 se presenta simulaciones basadas en pruebas para identificar el modelo, las cuales corresponden a Δf de 210 mHz con 4 válvulas (Rango de potencia entre 22 y 42 MW). Se puede observar que, ante el escalón de frecuencia, la respuesta de la potencia real y simulada tienen un bajo MSE. Cabe indicar que, las simulaciones para identificación paramétrica fueron realizadas considerando pruebas reales con diferentes variaciones de frecuencia con la finalidad de mejorar la precisión de la identificación paramétrica.
CONCLUSIONES Y RECOMENDACIONES
Se verifica que el protocolo de pruebas desarrollado es robusto y permite la verificación y actuación dinámica del regulador de velocidad, puesto que, se obtienen medidas en tiempo real de las señales de: potencia eléctrica, frecuencia y apertura de válvulas de agua, permitiendo realizar la correcta identificación paramétrica del regulador de velocidad mediante programación DSL en PowerFactory de DIgSILENT. Este protocolo de pruebas deberá replicarse en las centrales de generación del S.N.I. para obtener información del comportamiento real del sistema Generador-Regulador de velocidad y realizar el análisis de resultados y cumplimiento de normativa, y en caso, de incumplimiento realizar la sintonización adecuada del regulador.
Es importante destacar que, a partir del protocolo de pruebas establecido y los análisis realizados, se han identificado todas las restricciones que limitan la actuación del regulador de velocidad de las unidades de generación de la central Delsitanisagua. Una de las particularidades principales del regulador es que cuenta con dos curvas características de Regulación de Potencia - Frecuencia, las cuales son función del número de inyectores; adicionalmente, mediante pruebas se observó que dichas curvas no son simétricas ante incrementos/decrementos de frecuencia de igual magnitud. Sin embargo, los resultados de las pruebas con los parámetros de la característica de regulación (ingresadas en campo) y las ganancias del controlador PID (Proporcional-Integral-Derivativo) que se encuentran ingresadas actualmente en el regulador de velocidad son adecuadas a los requerimientos del futuro código de red ecuatoriano.
Por último, es importante mencionar que el Control Potencia Activa del sistema SCADA de la central sirve para cambiar la consigna de despacho e inhibe el Modo RPF; por tal razón, se recomienda que tanto, la operación de la central como el Operador del Sistema, verifiquen la activación del modo de operación RPF y la desactivación del Modo Potencia Activa, luego de alcanzar alguna consigna planificada

