











 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
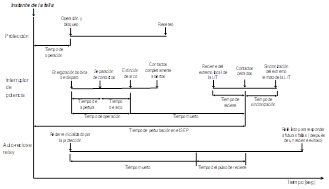
En líneas de transmisión (L/T) el 90% de las fallas son de tipo fase-tierra y de naturaleza transitoria; por lo que, para mejorar los márgenes de estabilidad de un SEP e incrementar la confiabilidad y disponibilidad de un enlace débil (una sola línea de transmisión entre dos subestaciones), se implementan los esquemas de apertura y recierre monopolar (SPS por sus siglas en inglés). Un esquema SPS contempla el disparo de la fase fallada (acción Single Pole Trip-SPT) a través de los interruptores en ambos extremos de una L/T; seguidamente se recierra el interruptor (acción Single Pole Reclosing-SPR) desde un extremo de la línea considerando un determinado tiempo muerto, y se procede a recerrar el interruptor desde el otro extremo de la línea cuando existan condiciones adecuadas de sincronización [1].
Cuando ocurre la actuación de un esquema SPS, durante el tiempo muerto de la fase abierta (condición Single Pole Open-SPO), la potencia es transmitida por las fases sanas; donde, debido al fenómeno transitorio, se producen oscilaciones de potencia. Además, luego de la sincronización de la fase fallada también se presentan oscilaciones de potencia, las cuales ahora se manifiestan en las tres fases. La ocurrencia de estos eventos puede provocar falsas actuaciones del esquema de protección de la línea, y en especial, de los esquemas basados en el uso de relés de distancia (R-21); por lo que la complejidad, desde el punto de vista de ajuste y coordinación de éste tipo de protección, se incrementa.
El desempeño del R-21 durante eventos SPS resulta fundamental para realizar sus ajustes, de tal manera que el relé opere en condiciones de falla e ingrese a un estado de bloqueo cuando ocurran oscilaciones estables de potencia. Generalmente, los programas de simulación para ajuste de protecciones usan el modelo pi de la línea de transmisión; el cual, a pesar de su simplicidad, ha dado buenos resultados; sin embargo, para un análisis detallado del cálculo que realizan los R-21 en presencia de esquemas SPS, las líneas de transmisión deben ser modeladas considerando sus parámetros distribuidos y la dependencia a la frecuencia [2].
Este trabajo se enfoca en analizar, mediante simulaciones, la dinámica del evento SPS visto por los R-21 asociados a los extremos de una L/T en falla, tanto los de fase abierta como los de las fases sanas. Para esto, usando el programa ATP, se presenta el estudio de la actuación dinámica del relé R-21 en los estados SPT, SPO y SPR aplicados a una L/T de un SEP de prueba tomado de [3], usando modelos pi y modelos dependientes de la frecuencia. Debido a que el modelo de biblioteca del R-21 disponible en ATPDraw no permite el análisis por fase, se diseña e implementa un criterio de configuración de los relés R-21 para eventos SPS de acuerdo a [4], y se valida el uso del estimador de impedancia para fallas monofásicas disponible en la biblioteca de ATPDraw, de acuerdo al análisis ohm phase domain tomado de [2]. Finalmente, la función de bloqueo por oscilación de potencia es implementada.
MARCO TEÓRICO REFERENCIAL AL MODELO DE RELÉ ANSI TIPO 21
Los relés de distancia por lo general disponen de dos tipos de características, las cuales son: Mho y Poligonal. En este trabajo se selecciona la característica Poligonal, debido a que en la actualidad es el utilizado con mayor frecuencia y ha desplazado, por sus ventajas, a los demás tipos.
Relé de Distancia Tecnología Numérica
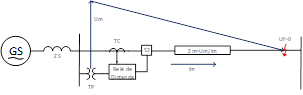
De acuerdo a la Fig. 1, el R-21 genera una condición de actuación o de disparo a partir del análisis de dos señales eléctricas locales: corriente, obtenida desde el transformador de corriente (TC) y voltaje, obtenida desde el transformador de potencial (TP) o divisor capacitivo de potencial (DCP). Las señales analógicas son convertidas a señales digitales mediante un proceso previo de muestreo y filtrado, con el fin de obtener su forma fasorial tanto en amplitud (módulo) como en fase (ángulo); donde u m es el voltaje medido en condición de falla, 𝒊 𝒎 es la corriente medida de cortocircuito, 𝒖 𝒇 es el voltaje en el punto de falla y 𝒛 𝒎 es la impedancia calculada por el R-21.
Para ilustrar el concepto de un comparador en magnitud, el cual es utilizado ampliamente por los R-21 para identificar eventos de fallas, en la Fig. 2 las señales fasoriales provenientes del SEP son tratadas de tal manera que permiten adecuarlas en dos entradas: una de voltaje, 𝒗 𝑳 , y otra de corriente, 𝒊 𝑳 , según [5]. Posteriormente, un comparador de magnitud, cuyas entradas son 𝒗 𝟏 y 𝒗 𝟐 , genera una señal de disparo cuando ocurra la condición |𝒗 𝟐 |> |𝒗 𝟏 |.
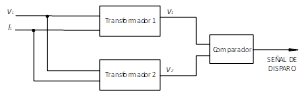
Asumiendo que el voltaje 𝒗 𝑳 es el fasor de referencia, mientras que la corriente 𝒊 𝑳 atrasa a 𝒗 𝑳 un angulo 𝝓 𝑳 , además de que los voltajes de salida 𝒗 𝟏 y 𝒗 𝟐 son combinaciones lineales con constantes escalares 𝓴 𝟏 𝒚 𝓴 𝟏 de los vectores de entrada, y expresando las impedancias 𝒛 𝟏 ∠ 𝝍 𝟏 y 𝒛 𝟐 ∠ 𝝍 𝟐 (pertenecientes a los transformadores 1 y 2) en forma polar [5]; los voltajes de entrada al comparador están dados por las ecuaciones (1) y (2) [5].


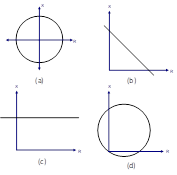
Realizando un arreglo matemático descrito a detalle en [5] para la condición |𝒗 𝟐 |≥ |𝒗 𝟏 |, se obtiene la expresión general del comparador en magnitud, dada por (3), donde la selección de los parámetros 𝓴 𝟏 , 𝓴 𝟐 , 𝒛 𝟏 y 𝒛 𝟐 proveen al comparador distintas características que son clasificadas dentro del plano R-X, según se observa en la Fig. 3.

Relé de Distancia Característica Poligonal
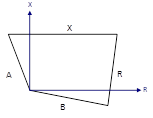
El R-21 tipo poligonal, como se muestra en la Fig. 4, es un conjunto de comparadores en magnitud que utilizan características de tipo reactancia, resistencia y blinders (ver Fig. 3b), para determinar así su alcance reactivo X, su alcance resistivo R y dotar a la característica la propiedad de direccionalidad con el uso de los blinder A y B.
La expresión formal para implementar la característica poligonal en el R-21 plantea el uso del principio de polígonos convexos [6]; el cual determina si un vector de coordenadas (𝒓,𝒙) se encuentra dentro o fuera de un polígono regular mediante el conjunto solución del sistema de inecuaciones constituido por (4), (5), (6) y (7); donde (𝑹 𝟏 , 𝑿 𝟏 ), ( 𝑹 𝟐 , 𝑿 𝟐 ), ( 𝑹 𝟑 , 𝑿 𝟑 ) y ( 𝑹 𝟒 , 𝑿 𝟒 ) son coordenadas en el plano complejo R-X que forman el polígono.




Principio de Medición de Impedancia
Actualmente la Transformada Discreta de Fourier (DFT por sus siglas en inglés) es uno de los algoritmos comúnmente utilizados para calcular la impedancia vista por el R-21 mediante la relación 𝒗/𝒊, ya que la DFT descompone una señal discreta del dominio del tiempo al dominio de la frecuencia, en la cual está presente todo el espectro de frecuencia de la señal; sin embargo, para el propósito del relé, se puede extraer la componente fundamental de frecuencia de la señal (60 Hz) excluyendo el contenido armónico no deseado. A éste proceso se le conoce como Full and Half Cycle Window. Para lectores interesados en desarrollar algoritmos para implementar la DFT, la referencia [7] describe diferentes formas de cómo realizarlo.
De acuerdo con [2], el cálculo de un fasor de impedancia depende en la manera de cómo se encuentre configurado su lazo de medición; por tal motivo, los R-21 modernos introducen dos nuevos métodos de medición: ohm loop domain y ohm phase domain. Las principales diferencias entre estos dos métodos de medición radican en la afectación de la corriente de retorno por tierra que circula por la red cuando se tiene una condición desbalanceada del SEP al momento de la falla, y las implicaciones en el diseño de la característica poligonal del R-21.
Ohm Loop Domain
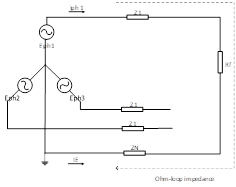
En la Fig. 5 se tiene una red sólidamente puesta a tierra, la cual representa un evento de falla monofásica con resistencia de falla 𝒓 𝒇 . El lazo de impedancia que se forma bajo el concepto Ohm loop domain se describe mediante la ecuación (8), donde la impedancia de retorno por tierra 𝒛 𝑵 (9) en su componente real e imaginaria, están dadas por las ecuaciones (10) y (11) [2].






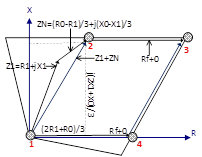
En la Fig. 6 se muestra el criterio de diseño de la característica poligonal basado en las ecuaciones (10), (11) y (12); donde el punto 1 representa la configuración de la característica con ?? 𝒇 =𝟎 al principio de la línea de transmisión, el punto 2 es el alcance límite de la configuración de la característica con 𝒓 𝒇 =𝟎, el punto 3 es el alcance límite de la característica con valor 𝒓 𝒇 diferente de cero y el punto 4 representa el alcance máximo de la configuración de la característica con valor 𝒓 𝒇 diferente de cero al principio de la línea de transmisión.
Ohm Phase Domain
Ahora para determinar la impedancia medida bajo el concepto ohm phase domain se debe considerar el aporte que tiene la corriente de retorno por tierra a más de la corriente que circula por la fase en el momento de la falla. Esta expresión viene dada por (14); donde 𝒆 𝒑𝒉𝟏 es el voltaje de fase medido por el relé.

En base a la Fig. 5, aplicando la ley de voltajes de Kirchhoff, se obtiene la ecuación (15).

Sustituyendo la ecuación (15) en (14) la impedancia medida bajo el concepto ohm phase domain es determinada por (16).

Descomponiendo la ecuación (16) en su componente real e imaginaria, se obtienen las ecuaciones (17) y (18).


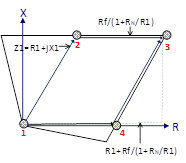
En la Fig. 7 se muestra el criterio de diseño de la característica poligonal basado en las ecuaciones (16) y (18), donde el punto 1 representa la ubicación de la falla monofásica con 𝒓 𝒇 =𝟎 al principio de la línea de transmisión; el punto 2 representa el alcance límite de la configuración de la característica con 𝒓 𝒇 =𝟎; el punto 3 es el alcance límite de la característica con un valor 𝒓 𝒇 diferente de cero y el punto 4 representa el alcance máximo de la falla monofásica con valor 𝒓 𝒇 diferente de cero al principio de la línea de transmisión.
Por lo tanto, al analizar las ecuaciones (12) y (16), se determina que la característica poligonal diseñada bajo criterios ohm loop domain es 𝟏+ 𝒛 𝑵 𝒛 𝟏 veces más grande que la característica poligonal diseñada con criterios ohm phase domain, de acuerdo a (19).

Condición de Fase Abierta
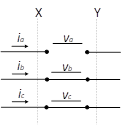
Una vez disparada la fase fallada por la operación del R-21, y basado en [3], para analizar el efecto que tiene la operación de disparo monopolar y, consecuentemente, generar en el SEP una condición desbalanceada, en la Fig. 8 se muestra una sección trifásica de un SEP con el conductor de la fase-A abierto entre dos puntos (X, Y); donde 𝒗 𝒂 , 𝒗 𝒃 , 𝒗 𝒄 son las caídas de voltaje en serie e 𝒊 𝒂 , 𝒊 𝒃 , 𝒊 𝒄 son las corriente que circulan por la línea. Cabe mencionar que éstas variables durante la condición SPO toman valores de 𝒗 𝒃 = 𝒗 𝒄 =𝟎 e 𝒊 𝒂 =𝟎.
En términos de sus componentes simétricas se obtienen las ecuaciones (20) y (21) [3].


La conexión de las redes de secuencia a paritr de las ecuaciones (20) y (21) se muestran en la Fig. 9, donde se observa que la corriente de secuencia positiva se divide entre las redes de secuencia negativa y cero; es decir que 𝒊 𝒂𝟏 =−( 𝒊 𝒂𝟐 + 𝒊 𝒂𝟎 ).
Al analizar la Fig. 9 se observa que la condición SPO genera una corriente de secuencia negativa y cero que fluyen en dirección opuesta a la corriente de secuencia positiva. En consecuencia, la presencia de una corriente de secuencia negativa genera en la máquina sincrónica un torque que se opone al producido por las corrientes de secuencia positiva; lo que conlleva en la práctica a presentarse un frenado en el movimiento del rotor de la máquina sincrónica [1].
Fenómeno de arco secundario
Durante la condición SPO, a más de presentar estrés en las máquinas sincrónicas debido a condiciones desbalanceadas del SEP, también se presenta un acoplamiento electroestático y electromagnético en la fase abierta, es decir, que existe un acoplamiento capacitivo e inductivo entre las fases sanas y la fase fallada, dando lugar a la formación de una corriente de arco secundario. La corriente de arco secundario se origina inmediatamente después de la corriente primaria de falla, debido al estado ionizado del aire provocado por la formación del arco primario en condición de falla, y la inducción de voltaje existente por los acoplamientos capacitivos e inductivos entre los conductores de la fase abierta y los conductores de las fases no falladas [1]. El tiempo desde la apertura de la fase hasta que el aire recupera sus propiedades aislantes puede ser estimado mediante (22), la cual es depende del nivel de voltaje de la línea [8].

ESQUEMAS DE PROTECCIÓN EN APLICACIONES SPS
Disparo monopolar
De acuerdo con [1], el desafío que presentan los relés de protección para aplicaciones SPS es identificar fases falladas correctamente. Esto no representa un desafío para fallas monofásicas sólidas a tierra, pero ésta tarea viene a ser más difícil a medida que aumenta la resistencia de falla. Por tal razón, la mayoría de los relés modernos comerciales proporcionan algoritmos de identificación de fases falladas y las salidas de disparo necesarias para los esquemas SPS.
Recierre monopolar
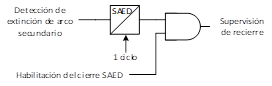
De acuerdo con [1], actualmente el recierre de una fase abierta se lo realiza de una manera adaptativa; es decir, que una lógica de supervisión conocida como SAED (del inglés Secondary Arc Extinction Detection) es utilizada para prevenir el recierre bajo una condición de falla permanente. En la Fig. 10 se muestra una lógica de supervisión usando un elemento SAED; el cual, minimiza el tiempo muerto de la fase abierta iniciando la acción SPR después de la extinción del arco secundario. El retraso en tiempo del SAED proporciona un margen para que el aire anteriormente ocupado por el arco recupere sus características aislantes.
También la acción SPR puede ser realizada de una manera tradicional. La referencia [1] menciona que un esquema de recierre tradicional permite configurar un tiempo muerto de recierre. En este tiempo se debe establecer un margen suficiente para permitir que el arco secundario se extinga y que el aire ionizado caliente sea reemplazado por aire desionizado frío, permitiendo así que se establezca un medio de asilamiento adecuado. Los tiempos típicos de SPO son de 1000 ms para fallas monofásicas a tierra. El principal inconveniente en el uso de esquemas SPR tradicionales es que si la falla es de naturaleza permanente, volver a cerrar un interruptor en falla puede tener efectos perjudiciales en el SEP y su equipamiento [1].
Actuación del relé de distancia durante una condición SPO
La condición SPO tiene poco efecto sobre el ángulo de voltaje de secuencia positiva [1]. Por tal motivo, los relés Mho polarizados por voltaje de secuencia positiva son la mejor opción para aplicaciones SPS.
Los elementos de distancia poligonales, de acuerdo al análisis desarrollado anteriormente, utilizan corrientes de secuencia negativa o cero para su polarización, las cuales pueden afectar el rendimiento de las unidades de tierra A-G, B-G y C-G; por lo tanto, la solución tradicional consiste en bloquear estos elementos durante el período SPO, después de ocurrir el disparo monopolar [1]; pero ésta acción no es recomendable realizarla debido a que durante la condición SPO posiblemente puedan ocurrir fallas en las fases sanas y éstas deben ser detectadas por sus respectivas unidades de tierra. La referencia [9] recomienda el uso de elementos poligonales de alta velocidad para que las unidades de tierra relacionadas a las fases sanas permanezcan operativas, ya que estos elementos poseen características adaptativas que reemplazan las corrientes de secuencia con corrientes incrementales del lazo de medición de las unidades de tierra del relé de distancia, durante el período SPO.
PROPUESTA DE MODELO DE RELÉ 21 APLICADO A ESQUEMAS SPS
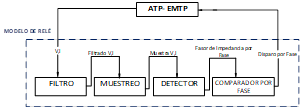
El modelo del R-21 que se desarrolla en el presente trabajo es implementado en el software ATP tomando como base el modelo de biblioteca incorporado en ATPDraw, el cual no es apto para esquemas SPS. El modelo desarrollado, de acuerdo a la Fig. 11, consiste en varios grupos de bloques programables escritos en lenguaje de programación MODELS, los cuales acondicionan las señales de voltaje y corriente que ingresan el relé, realizan el muestreo y la transformación a señales discretas con una tasa de muestreo de 480 Hz, y contienen los algoritmos que generarán comandos de disparo del R-21 por cada fase.
A continuación se detalla el proceso de modelamiento del R-21 desarrollado en ATP.
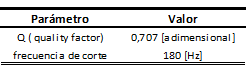
Se implementa en ATP un filtro pasivo pasa bajos de segundo orden Butterworth, sobre la base de lo sugerido por [10], para rechazar las componentes de alta frecuencia de las señalas de corriente y voltaje analógicas que ingresan al relé. La expresión de la función de transferencia para implementar el filtro está dada por (23), donde 𝝎 𝟎 es la frecuencia angular de corte. Los parámetros necesarios de configuración del filtro se consideran de acuerdo a [10] y se muestran en la Tabla 1.

Estimador de impedancia para fallas monofásicas de ATPDraw
El estimador de impedancia disponible en la biblioteca de ATPDraw se encuentra diseñado de tal forma que tanto el proceso de muestreo como el proceso del bloque detector son incluidos dentro de un algoritmo desarrollado en lenguaje de programación MODELS, con el fin de obtener en su salida un fasor de impedancia calculado para cada fase.
De acuerdo con el lazo de medición del MODEL UI2RXE de ATPDraw, éste realiza el cálculo de un fasor de impedancia a frecuencia fundamental en base a las ecuaciones (24) y (25).


Siendo la corriente de retorno por tierra la ecuación (26).

Se validan las expresiones (24) y (25) sustituyendo las ecuaciones (13) y (26) en (14) del análisis previo ohm phase domain, y obteniendo como resultado (27).

Por lo tanto se considera a (28) como la expresión para determinar el factor 𝒌 𝟎 y configurar el estimador de impedancia para fallas monofásicas disponible en la biblioteca de ATPDraw.

Comparador en Magnitud por Fase
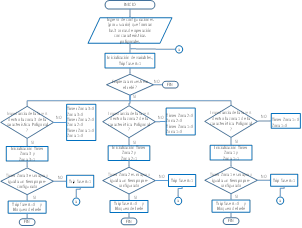
En esquemas SPS se requiere que los relés que componen el esquema de protección tengan la habilidad de detectar con gran precisión fases falladas y, además, puedan generar señales de disparo por cada fase [1]. Por tal motivo, en el presente estudio se implementa un algoritmo que proporciona al relé la capacidad de emitir señales de disparo por fase para aplicaciones SPS, al desacoplar el tratamiento trifásico que realiza el comparador en magnitud de librería, a un tratamiento por cada fase. En la Fig. 12 se muestra un diagrama de flujo que indica los pasos a seguir en la modelación por fase del bloque “Comparador en magnitud monofásico”, desarrollado para el presente trabajo.
Cabe mencionar que el análisis por fase que se presenta en el estudio se desarrolla considerando ciertas suposiciones en el comportamiento del SEP de prueba tomado de [3]; como por ejemplo: se considera únicamente eventos de fallas monofásicas a tierra de baja impedancia, ya que en varios relés comerciales para identificar fases falladas, estos se valen necesariamente de otros elementos de protección (relés de bajo-voltaje por fase) para llevar a cabo ésta tarea; lo que implica que el esquema de protección aumenta su complejidad al incluir nuevos algoritmos y lógicas de otros relés .
CASO DE ESTUDIO 1: EVENTO SPS CON MODELO DE LÍNEA PI
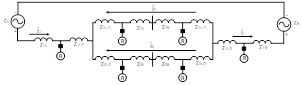
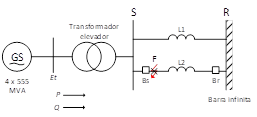
En esta sección se analiza la dinámica de un evento SPS vista por los R-21 del SEP de prueba tomado del ejemplo 13.2 de la referencia [3]; el cual consta de un modelo generador-barra infinita conectados a través de un sistema de transmisión en paralelo, tal como se muestra en la Fig. 13 y modelado en ATPDraw.
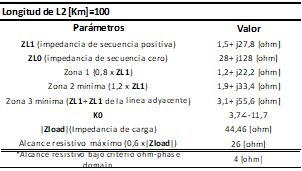
Para el SEP de prueba se aplica el esquema SPS de acuerdo a lo sugerido en [4], y mostrado en la Fig. 14. El esquema SPT, comandado por los R-21 ubicados tanto en S como en R del SEP de prueba, se configura de acuerdo a la Tabla 2. Para el caso de estudio se considera una configuración de los R-21 haciendo uso de sus zonas naturales de operación dentro de un esquema de protección primaria, tal como se muestra en la Fig. 15.

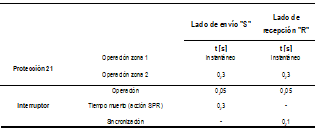
Al inicio del evento SPS, el SEP de prueba se encuentra operando en estado estable; luego, a t=1.0 s, en la fase-A de L2 se aplica un evento de cortocircuito monofásico a tierra de baja impedancia de acuerdo a lo mostrado en la Fig. 15. Los tiempos de actuación del esquema SPT (zona instantánea y temporizada de los R-21) y recierre tradicional de la fase abierta (SPR) se detallan en la Tabla 3.
Para evaluar el desempeño del R-21 en términos de tiempo de operación se debe tener en cuenta que aunque la trayectoria de la impedancia, ante un evento de cortocircuito, viaja de manera instantánea desde la zona de carga hasta un lugar dentro de la Zona de operación la cual represente a la falla; se pueden presentar retardos en su tiempo de operación. Esto debido a los diferentes filtros y algoritmos que utiliza el R-21 tanto para calcular el fasor de impedancia como para procesar la información del fasor obtenido.
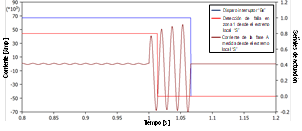
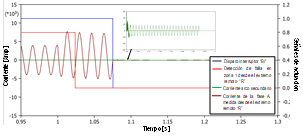
En la Fig. 16 se observa que para el R-21 ubicado en S (R-21S), existe un retardo de tiempo en la detección de falla aproximadamente de 0,02 s. Una vez enviada la señal de disparo por el R-21S, su interruptor asociado opera únicamente para la fase-A, con un retardo de 0,05 s. Esto debido al tiempo que toma el proceso de energización de la bobina de disparo del interruptor y de la separación de sus contactos en un cruce por cero de corriente (ver Fig.14 y Tabla. 3). En conjunto, el R-21S y su interruptor asociado actúan en un tiempo aproximado de 1,0663 s del tiempo de simulación para despejar el aporte de corriente de falla desde el extremo S. A su vez, el R-21 ubicado en R (R-21R), el cual brinda una protección “hacia adelante” a L2, actúa de manera temporizada (operación en Zona 2) de acuerdo a la forma en que fueron configurados los R-21.
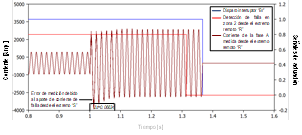
En la Fig. 17, se evalúa el desempeño del R-21R en términos de tiempo de operación; donde en conjunto, el R-21R y su interruptor asociado actúan en un tiempo aproximado de 1,36 s del tiempo de simulación para despejar el aporte de corriente de falla desde el extremo R. Al realizar un análisis detallado del resultado de la simulación mostrada en la Fig.17, se puede observar que el aporte de corriente de cortocircuito que fluye desde S en dirección opuesta al aporte de corriente de cortocircuito del extremo R, provoca un error en la medición del lazo de impedancia tanto para el R-21R como para el R-21S; lo que implica que para el tiempo de 1 a 1,0663 s de la simulación, la corriente medida desde el extremo R se incremente y genere un efecto de sub-alcance en la impedancia calculada por el relé. El efecto de error en la medición del R21-S y R es tratada a detalle en [2] con el nombre de Double Infeed.
Análisis en el plano complejo R-X
Los análisis que involucran la dinámica del R-21 tienen lugar dentro del plano complejo R-X ya que permiten una mejor comprensión del desempeño del relé en términos de alcance y exactitud. De manera general, la dinámica de todo el evento SPS se conforma por: 1) Estado estable, 2) Detección de falla monofásica y posterior disparo de la fase fallada A, 3) Condición de fase-A abierta (SPO) y 4) Acción de recierre (SPR) y posterior sincronización de la fase-A.
Dinámica vista por el R-21S
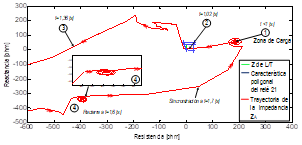
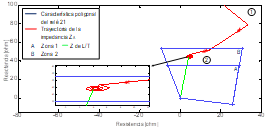
En la Fig. 18 se muestra la respuesta de la trayectoria de la impedancia medida por el R-21S para la fase-A (Za) ante la falla monofásica; es decir, el traslado instantáneo de la trayectoria Za desde su zona de carga 1) hasta un lugar dentro de la característica de operación, la cual representa a la condición 2). El ingreso de Za a la Zona 1 de operación del R-21S permite al relé generar una señal de disparo de acuerdo a lo mostrado en la Fig.16.
De acuerdo con la Fig. 14, el esquema SPS plantea el bloqueo del R-21S después de que éste haya operado, para luego “resetearse” dentro del tiempo de operación de su interruptor asociado; lo que implica que el R-21S, al momento de volver a condiciones iniciales de operación, se encuentre midiendo corrientes y voltajes tanto en condición 3) como en condición 4) del esquema SPS, tal como se muestra en la Fig. 19.
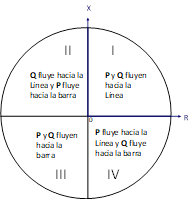
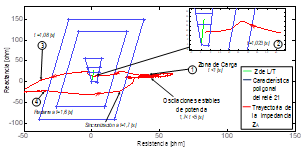
Durante las condiciones 1), 2), 3) y 4) de la Fig. 19 se observa la presencia de eventos importantes, los cuales se analizarán a continuación en función de las condiciones de flujo de potencia del SEP (ver Fig. 20) y la ubicación de la trayectoria Za en el plano complejo R-X. De los resultados de las simulaciones se observa que la trayectoria de Za, en la condición 2), permite la actuación y posterior bloqueo de la unidad de tierra A-G del R-21S; donde además, se observa que todo el evento de falla monofásica ocurre dentro del cuadrante I del plano R-X.
En el instante en que el R-21S ingresa en la condición SPO, la trayectoria de Za describe un movimiento que tiende a crecer rápidamente, a través de los cuadrantes II y III del plano complejo R-X; lo que implica que el R-21S ya no se encuentra midiendo una corriente de falla por la fase-A y por lo tanto ésta fase se encuentra desenergizada. El evento puede ser analizado de acuerdo a (29); donde al reemplazar el valor de 𝟎 para 𝒊 𝒂 se demuestra que el lazo de medición del R-21S se encuentra calculando un valor de impedancia que tiende a crecer en la condición 3), pero que no es de gran magnitud debido a que el desbalance del SEP presenta corrientes de secuencia cero por la red, y éstas son medidas por el relé. De igual manera, la dirección que describe la trayectoria Za durante la condición SPO esta impuesta por la dirección de la corriente de secuencia cero que polariza al R-21S.

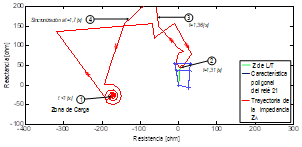
Después de considerar un respectivo tiempo muerto, se procede a realizar el recierre de la fase abierta desde el extremo S de L2. La acción SPR vista por el R-21S se muestra en la Fig. 19 como la condición 4) a t=1,6 s del tiempo de simulación, dando lugar a que la trayectoria Za ahora se ubique dentro del cuadrante III del plano R-X y permanezca ahí hasta que se presenten condiciones de sincronización desde el otro externo de L2.
Al analizar la trayectoria de Za en la condición 4) se observa que sus componentes de resistencia y reactancia son negativas y de gran magnitud; lo cual implica que el R-21S se encuentra midiendo en la fase recerrada una corriente de pequeña magnitud con características capacitivas; lo que implica que la presencia de una condición transitoria de voltajes y corrientes, conocidas con el nombre de inrush charging, afectan la operación del R-21S. Esto debido a que las corrientes de “charging” aparecen con grandes magnitudes en eventos transitorios (operación de maniobra) que en estado estable [11]. La corriente de charging se define para un modelo de línea pi como las corrientes que fluyen a través de las capacitancias paralelas que modelan la línea [11]. Por lo tanto, para el caso de estudio, cuando se presenta la re-energización de la fase abierta-A de L2 desde únicamente un extremo, la capacitancia presente de la línea genera una gran corriente de inrush charging en sus primeros ciclos [11], con componentes de armónicos superiores, tal como se muestra en la Fig. 21.
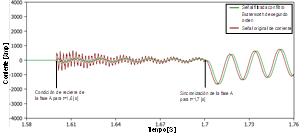
Figura 21: Corriente de inrush charging (primeros ciclos) y charging presente en la re-energización de la fase-A y filtrada por el R-21S
Debido al filtrado previo de las señales analógicas provenientes de los elementos de medición (TC y TP) se pueden eliminar las componentes de alta frecuencia de la corriente inrush charging, lo que permite que Za describa su trayectoria en la ubicación del cuadrante III del plano R-X, tal como se muestra en la Fig. 19. Cuando existan condiciones adecuadas de sincronización, se procede a recerrar la fase abierta desde el extremo R de L2 a t=1,7 s del tiempo de simulación; por tal motivo, la trayectoria de Za vuelve hacia la condición 1) de estado estable del SEP, tal como se muestra en la Fig.19.
Dinámica vista por el R-21R
Para el análisis, se considera polarizar al R-21R de manera inversa a las condiciones del flujo de potencia del SEP en estado estable; esto debido a que las configuraciones de las Zonas de operación del R-21R son las mismas que la del R-21S, y de esta manera se puede establecer una cobertura de protección “hacia adelante” para L2 sin la necesidad de volver a configurar el R-21R. Dicha condición se logra al cambiar el sentido de dirección en la medición de corriente por parte del TC ubicado en R.
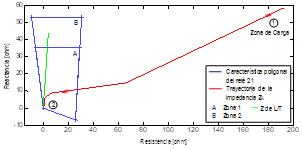
En la Fig. 22, la polarización inversa del TC hace que la impedancia de la zona de carga vista por el R-21R tenga componentes negativas; sin embargo, al momento de la ocurrencia de la falla, éste responde de manera adecuada al ingresar en su Zona 2 de operación para, posteriormente, su interruptor asociado operar a t=1,36 s del tiempo de simulación. Adicionalmente se demuestra que la trayectoria de Za presenta una condición bastante ideal a lo que teóricamente representa el uso de esquemas SPS para el R-21, debido a que el R-21R no mide ninguna corriente de charging.
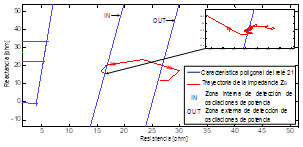
En la Fig. 23 se muestra como la trayectoria de Za se desplaza de manera instantánea hacia la Zona 2 de operación del R-21R; donde se puede apreciar de mejor manera el efecto de sub-alcance que se presenta en el R-21R como un error de medición [2]. Después de que el interruptor ubicado en S opera a t=1,06634 s de la simulación, el aporte de corriente de cortocircuito desde el extremo R aún persiste; haciendo que la trayectoria de Za ingrese en su Zona 2 de operación y permanezca ahí describiendo una trayectoria circular hasta que se cumpla la condición de disparo temporizado; lo que permite que, posteriormente, el interruptor ubicado en R opere y la trayectoria de Za cambie a la condición 3) de fase abierta.
CASO DE ESTUDIO 2: EVENTO SPS CON MODELO DE LÍNEA DEPENDIENTE DE LA FRECUENCIA
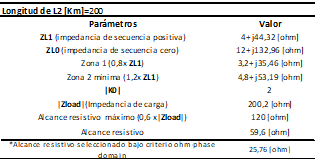
Para el caso de estudio 2, la configuración y tiempos de actuación del esquema SPS se mantiene igual al caso de estudio 1, con la diferencia que ahora se aplica un evento de cortocircuito monofásico de baja impedancia en la fase-A, a t=1,0 s, al 50% de L2 y que el modelo de línea de transmisión (modelo JMarti) toma en cuenta la geometría de la torre, las características eléctricas del conductor, los acoplamientos mutuos, la naturaleza de los parámetros distribuidos y la dependencia de la frecuencia. Los parámetros de la línea de transmisión para establecer las nuevas configuraciones de los R-21S y R-21R se muestran en la Tabla 4.
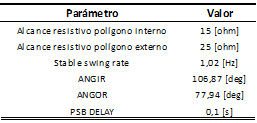
De acuerdo al modelo de SEP del estudio y considerando adecuados los ajustes de los sistemas de control de la máquina sincrónica según [3], se espera la presencia de oscilaciones estables de potencia en las fases sanas; las cuales serán monitoreadas por R-21S al activar la función Bloqueo por Oscilación de Potencia (PSB por sus siglas en inglés) incorporada al algoritmo del R-21 y configurada según lo sugerido por [12], presentado en la Tabla 5. El método de detección de oscilaciones estables de potencia es a través de la tasa de cambio de la impedancia.
Del resultado de las simulaciones en las Fig. 24 y 25 se muestran las corrientes de falla medidas por los TCs ubicados en S y R respectivamente; donde además se observa la detección de la condición de falla a t=1,0236 s por parte del R-21S y a t=1,0233 s por parte del R-21R, mientras que la actuación del interruptor ubicado en S tiene lugar a t=1,08 s y el interruptor ubicado en R actúa a t=1,07 s del tiempo de simulación. Además, se muestra que la presencia de la corriente de arco secundario no es medida por el R-21S o R-21R.
En la Fig. 26 se muestra como la trayectoria de la impedancia calculada por parte del R-21S responde a la falla monofásica de una manera instantánea, trasladándose a su Zona 1 de operación. Además se observa que la trayectoria de Za, en presencia del esquema SPS, describe un movimiento similar al ya analizado en el caso de estudio 1 con la diferencia de la presencia de oscilaciones estables de potencia.
Al analizar la respuesta del R-21S en la condicion 2) se observa que la trayectoria de la impedancia Za presenta un efecto de sub-alcance (ver Fig.26). Esto debido a que la circulación de una corriente de tierra por la línea paralela sana L1 induce un voltaje en la línea fallada L2; lo que implica que el lazo de medición de las unidades de tierra del R-21S presenten un error de medición debido a que ha cambiado su voltaje de polarización.
De acuerdo con [2], los acoplamientos entre las fases sanas de una misma línea y con fases de otras líneas pueden ser despreciados en estado estable del SEP y ante la ocurrencia de fallas en las cuales no intervenga ninguna condición de falla a tierra. Por tal motivo, tanto el R-21S como el R-21R (ver Fig.27) presentan un error en medición. Este efecto puede ser compensado al introducir a su lazo de medición un factor adicional de compensación mutua ( 𝒌 𝑴 ) multiplicado por la corriente de retorno por tierra de la línea adyacente ( 𝒊 𝟐𝑬 ), de acuerdo a (30) y (31).


La compensación introducida elimina el efecto de sobre-alcance o sub-alacance causado por el error de medición en la impedancia calculada.
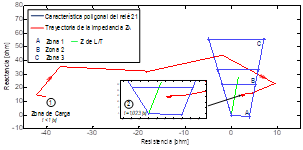
Figura 27: Error de medición del R-21R debido a la configuración de líneas paralelas del sistema de transmisión
Detección de Oscilaciones Estables de Potencia en la fase sana-B
En el uso del modelo de línea JMarti se evidenció la presencia de oscilaciones estables de potencia; las cuales, se ven reflejadas en los R-21 como oscilaciones en su impedancia calculada. Con el fin de analizar la actuación de las unidades de tierra relacionadas a las fases sanas; y de acuerdo a la filosofía de protecciones ante condiciones oscilatorias presentes en sistemas de transmisión, la función PSB ayudará a prevenir la ocurrencia de falsos disparos de los R-21 durante la presencia de oscilaciones estables de potencia.
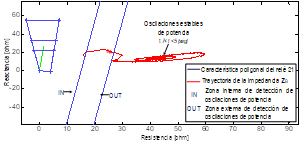
En la Fig. 28 se muestra como el esquema SPS no solo afecta a la fase fallada-A sino, además, debido al fenómeno transitorio, se producen oscilaciones estables de potencia en sus fases sanas. Para éste caso se muestra la manera en que las oscilaciones estables de potencia en la fase sana-B se ven reflejas en oscilaciones de la impedancia calculada (Zb) que, si son de suficiente magnitud, pueden ingresar a sus Zonas de operación del relé y provocar falsos disparos.
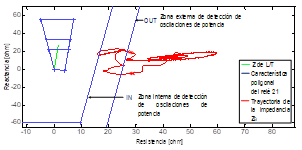
En la Fig. 29 se muestra como el transitorio de corriente producido por la falla monofásica y el transitorio de voltaje producido por la operación de maniobra para despejar la falla en la fase-A, se ven reflejados en la trayectoria de Zb dentro del plano R-X como una línea continua delgada que ingresa a la zona externa del polígono de detección de oscilaciones de potencia, pero, que no es declarada como oscilación debido a que la trayectoria Zb describe un movimiento rápido en eventos transitorios. Sin embargo, durante la condición SPO de la fase fallada-A se muestra la primera oscilación estable de potencia, la cual se presenta con un movimiento lento de Zb (línea gruesa) en el plano R-X.
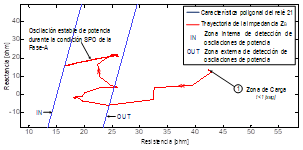
Figura 29: Primera oscilación estable de potencia presente en la fase-B durante la condición SPO de la fase-A
En la Fig. 30 se muestra la trayectoria de Zb cuando ocurre el evento de recierre y sincronización de la fase fallada-A, donde se muestra que los transitorios de voltaje presentes en estos dos eventos de maniobra producen un movimiento rápido de Zb, llevándole de un lugar dentro del polígono interno de detección de oscilaciones a un lugar fuera del polígono externo de detección de oscilaciones potencia.
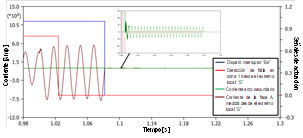
En la Fig. 31 se presentan oscilaciones estables de potencia vistas por la unidad de tierra B-G del R-21S como oscilaciones en la trayectoria de Zb, con una velocidad de oscilación aproximada de 1,02 Hz. Cuando la fase fallada-A es nuevamente puesta en servicio, la corriente en la fase sana-B decrece lentamente, de acuerdo a lo mostrado en la Fig. 32; motivo por el cual, se presenta un incremento de la impedancia aparente de Zb y una trayectoria oscilatoria en un intervalo de tiempo de 3,3 s.
Además, en la Fig. 32, se muestra la operación de la función PSB (perteneciente a R-21S) de la siguiente manera: cuando se presenta una condición oscilatoria de potencia estable, un temporizador es iniciado al momento en que la trayectoria de Zb ingresa a la característica poligonal externa (zona externa). Si el conteo del temporizador alcanza su valor pre-configurado antes que trayectoria de Zb cruce el polígono interno (zona interna), una condición de oscilación estable de potencia es declarada.
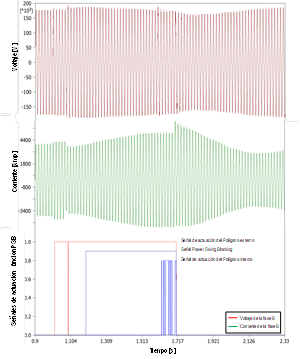
Figura 32: Detección de oscilaciones estables de potencia mediante el método convencional de tasa de cambio de la impedancia
Una vez declarada la condición de oscilación estable de potencia por la función PSB, mientras la fase fallada-A se encuentra abierta, éste bloquea la unidad de fase B-C y las unidades de tierra B-G y C-G por lo que, si ocurre una falla en la fase sana-B y es detectada por algún otro elemento de protección, la lógica de dicho elemento desbloquea la unidad B-G del R-21 para permitir su operación. Además, al ser declarada una condición de oscilación estable de potencia, la lógica de la función PSB del R-21 bloquea cada una de sus Zonas de operación.
DISCUSIÓN
En la sección anterior se ha presentado los resultados de las simulaciones considerando un modelo de línea dependiente de la frecuencia para analizar el comportamiento del relé de distancia, sin considerar la afectación del cálculo del fasor de impedancia ante la presencia de condiciones altamente dinámicas del sistema. Cabe señalar que si no se consideran algoritmos apropiados para contrarrestar las variaciones dinámicas presentes, el cálculo del fasor va a tener cierto grado de error.
De los análisis realizados se ha logrado demostrar que el modelo de estimador de impedancia disponible en la biblioteca de ATPDraw, a pesar de haber sido sometido a transitorios electromagnéticos, permite obtener un fasor que es estable después de un adecuado acondicionamiento de las señales por medio de un proceso analógico de filtrado (anti-aliasing). Sin embargo, las variaciones de frecuencia presentes por las oscilaciones del sistema, automáticamente afectan al período de la transformada de Fourier, lo cual causa errores en el cálculo del fasor del relé. Por lo tanto, si bien se demuestra que el modelo de estimador de impedancia funciona correctamente para calcular fallas monofásicas, éste no puede ser utilizado para analizar condiciones oscilatorias. Los algoritmos de frequency tracking pueden ayudar a corregir el cálculo del fasor de impedancia en presencia de condiciones oscilatorias al modificar la frecuencia de muestreo, o el número de muestras dentro de la transformada de Fourier, mediante un estimador de frecuencia. Este tipo de análisis deben ser revisados a futuro.
INFORMACIÓN ADICIONAL
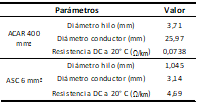
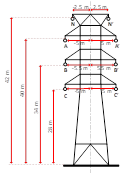
Información relevante para el modelamiento de la L/T del caso de estudio 2 se muestra en la Tabla 6, la cual consisten en un haz de 5 conductores ACAR 400 𝒎 𝒎 𝟐 por fase y dos conductores de guarda ASC 6 𝒎 𝒎 𝟐 . Además, la geométrica física de la torre se muestra en la Fig. 33.
CONCLUSIONES Y RECOMENDACIONES
El modelo de relé de distancia incorporado en la biblioteca de ATPDraw no responde de una manera adecuada para analizar la ocurrencia de eventos SPS; por tal motivo, adecuaciones en su algoritmo, como, por ejemplo: rediseñar el comparador en magnitud para un tratamiento por fase, han sido realizadas.
Dos casos de estudio de un mismo modelo de SEP han sido realizados. El primero tiene que ver con un modelo pi para cada una de las dos líneas de transmisión que enlazan a las subestaciones, mientras que el segundo caso las dos líneas de transmisión están sobre una misma torre y se modelan usando parámetros distribuidos y dependientes de la frecuencia. La diferencia principal, desde el punto de vista del relé de distancia es que los errores de medición causados por la configuración de líneas paralelas es más notoria que con respecto al error de medición producida por el aporte de corriente de cortocircuito desde otros puntos del SEP (efecto Double Infeed), además, de la presencia de oscilaciones estables de potencia.
La trayectoria Za, usando el modelo pi de línea de transmisión, describe un movimiento rápido y circular al momento que el esquema SPS realiza el recierre y sincronización de la fase abierta. Mientras que la trayectoria Za, usando el modelo de línea JMarti, describe un movimiento oscilatorio relativamente lento. Estas diferencias se presentan debido a la dependencia de la frecuencia del modelo JMarti; lo que implica que los parámetros resistencia e inductancia de la línea no son constantes, sino funciones de la frecuencia.
Existen varios métodos de detección de oscilaciones de potencia que discriminan entre oscilaciones estables e inestables. En el caso de estudio 2 se consideró el método convencional de la tasa de cambio de la impedancia para configurar la función PSB, para lo cual se requirió un extenso conocimiento del SEP de prueba con casos de fallas aplicados en diferentes condiciones operativas (análisis de estabilidad transitoria) y el conocer la ubicación de su centro eléctrico.
La dinámica de la trayectoria del relé de distancia puede verse afectada por los diferentes estados del esquema SPS; por tal motivo, se recomienda analizar otros parámetros de la trayectoria que describe el relé, como por ejemplo: su velocidad, monotonía, simetría, etc. para considerar adecuados márgenes de seguridad al momento de su configuración y así evitar falsas operaciones de éste elemento en presencia de corrientes “inrush charging” o de oscilaciones estables de potencia.
En el primer caso de estudio, el esquema SPT compuesto por R-21S y R-21R presenta un desempeño adecuado identificando y disparando la fase fallada; pero esta operación viene a ser más difícil en presencia de fallas de alta impedancia, motivo por el cual se recomienda que análisis adicionales sean realizados donde se tome en cuenta la necesidad de otros relés de protección para brindar mayor confiabilidad y selectividad a los esquemas de protección basados en el uso de relés de distancia, como por ejemplo el uso del relé de sobrecorriente direccional de tierra (ANSI tipo 67N) puede ayudar al esquema de protección a identificar correctamente fases falladas en aplicaciones SPS.

