











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroducción
Diferencial de GPS (DGPS) es la técnica que incrementa drásticamente la precisión e integridad de la posición en un receptor (Consentino & Diggle, 2006). El principio de funcionamiento consiste en utilizar un receptor de referencia de coordenadas conocidas y de un receptor de usuario (rover) para que a través de la diferenciación de sus medidas se elimine errores correlacionados en espacio y tiempo (Sanz Subirana, et-al., 2013), con excepción a los errores de multipath por ser errores locales y exclusivos de cada receptor. Se considera errores correlacionados entre receptores si la distancia entre ellos alcanza a los cientos o miles de kilómetros, así los errores provocados debido a la ionósfera, tropósfera y errores debido al reloj del satélite son mitigados con la utilización de la diferenciación simple (SD), de la misma manera la diferenciación doble (DD) reduce errores producidos debido al reloj del receptor (Sanz Subirana, et-al., 2013),. Con el fin de disminuir estos errores, existen varias técnicas de corrección que incluye la transmisión de las correcciones en tiempo real y por postproceso. El alcance de este documento se enmarca en el desarrollo del algoritmo que permita ejecutar el diferencial de GPS mediante el uso de las medidas de código de un receptor GPS de bajo costo al considerar la diferenciación en configuración simple y doble.

DGPS CONCEPTO Y ALGORITMO
La técnica de DGPS consiste en la diferenciación de las medidas de código o fase de GPS entre un receptor de referencia y un rover para eliminar errores comunes al considerar la distancia que existe entre ellos, con el fin de mejorar la precisión del posicionamiento final.
Estación de Referencia
La ciudad de Riobamba cuenta con dos estaciones de referencia, denominadas EREC y RIOP, las mismas que forman parte de la red de Monitoreo Continuo del Ecuador (REGME) (Instituto Geográfico Militar, 2017). La estación EREC, de propiedad de la Empresa Eléctrica Riobamba S.A., es un receptor GNSS (Global Navigation Satellite System) Trimble Net R9 con capacidad multiconstelación, alta versatilidad, diseñado para proveer alto rendimiento como un simple receptor. También es utilizado para la descarga de datos brutos usados para la ejecución de las correcciones de posicionamiento de un receptor GPS por el método de postproceso (Trimble, 2017).

Receptor GPS móvil (rover)
El receptor de GPS de bajo costo U-blox neo 6M V2 forma parte de la familia dispositivos de posicionamiento de precisión estándar (U-blox, 2017). El diseño compacto, la fácil manipulación, y tamaño representa una opción viable de adquisición al ofrecer precisión de 2.5 m y Time-To-First-Fix (TTFF) de menos de 1 s. Sin embargo, existen algunas limitaciones respecto a la obtención de los datos brutos, el protocolo de transmisión por defecto para el rover es NMEA0183 (NMEA, 2017) que es incompatible con el formato de estandarizado de almacenamiento Receiver INdependent Exchange (RINEX) de la estación de referencia, es por eso necesario utilizar herramientas de conversión entre formatos. RTKLIB es el software de posicionamiento estándar y preciso que entre las funciones principales tiene la de convertir archivos en diversos formatos estándares de navegación.
Ecuaciones de Navegación
La posición estimada del receptor es el baricentro del volumen de la intersección de esferas que tienen un radio igual al pseudorango. Por definición (Sanz Subirana, et-al., 2013),, el pseudorango es el tiempo que demora la señal durante la propagación entre el satélite y el receptor δt multiplicada por la velocidad de la luz.

El pseudorango no coincide con la distancia de geometría debido a algunos errores que incluyen la sincronización entre los relojes del receptor y satélite, a los efectos de propagación de la señal que incluye a factores ionosférico, entre otros. Con el fin de determinar la posición del receptor r = (x r , y r , z r ) y δt desde el pseudorango, al menos 4 satélites en vista son necesarios, así, el pseudorango del satélite i se define (Zabala, 2015):

donde (( es el rango geométrico entre el satélite y el receptor; (t
u
y (t
i
son el desfase entre el reloj en el receptor y en el satélite, respectivamente;  es el retardo ionosférico;
es el retardo ionosférico;  es el retardo troposférico; M es el error debido al multipath; K es el retardo instrumental del satélite y del receptor; y (i es una variable que representa otros errores locales del receptor.
es el retardo troposférico; M es el error debido al multipath; K es el retardo instrumental del satélite y del receptor; y (i es una variable que representa otros errores locales del receptor.
El pseudorango puede ser reescrito al despreciar los términos de multipath y ruidos locales tanto en el receptor como en el satélite.

donde ( i es el rango geométrico entre el receptor y el satélite, D i es la distancia que contiene los aportes del error debido a la ionósfera, tropósfera y de errores locales del receptor y c(t r es la variable que contiene los errores derivados al reloj del satélite y del receptor.
El rango geométrico ( i contiene las 4 coordenadas desconocidas del receptor. Por lo que para determinar la posición, es necesario formar un sistema de ecuaciones uniforme con al menos 4 ecuaciones para resolver las incógnitas de posición x, y, z y t.
Para i = 1, 2, 3, …, n (n ≥ 4) satélites la solución de navegación se define (Zabala, 2015):

donde x r , y r , z r son las coordenadas del receptor desconocidas, y x, y, z son las coordenadas cartesianas del i-ésimo satélite calculadas en base a sus efemérides.
El sistema de ecuaciones (4) no es lineal, por lo que su solución no es inmediata. Normalmente se cuenta con una posición aproximada del receptor y se procede a linealizar las ecuaciones en torno a una posición aproximada r o = (x o , y o , z o ), de la siguiente forme:

con dx = x r - x o ; dy = y r - y 0 y dz = z r - z o .
Al sustituir (5) en (3), se obtiene:

Al considerar las ecuaciones para  satélites, en notación matricial está dada por:
satélites, en notación matricial está dada por:

que en su forma compacta se representa como:
 ,
, donde y es un vector que contiene la diferencia de medida entre los pseudorangos observados y estimados, G es una matriz que contiene la geometría que existe entre el receptor y el satélite y x es un vector que contiene la desviación entre las coordenadas verdaderas y las coordenadas estimadas, además del offset del reloj del receptor.
La solución del sistema provee las coordenadas desconocidas estimadas del receptor:
La ecuación (8) no incluye las medidas de ruido, si se toma en cuenta, el modelo linear:

Debido al término de error el sistema no provee una solución exacta. En este caso la solución está dada por un vector de estimación  el cuál minimiza el error:
el cuál minimiza el error:

Least Square (LS) método de estimación para calcular la solución de sistemas sobre determinados. Es un criterio común utilizado en GNSS que minimiza la suma de los cuadrados de los residuos:
donde:

La diferencia entre las medidas
y
y el modelo estimado  es llamado vector residual.
es llamado vector residual.

La solución de mínimos cuadrados ordinaria viene dada por:

Técnica de DGPS
La precisión que se alcanza en la estimación de la posición del receptor puede verse mejorada cuando se utilizan técnicas diferenciales, puesto que pueden eliminarse muchas de las fuentes de error. Para que sean aplicables estas técnicas es necesario contar con un receptor fijo, del que se conoce con precisión su posición. El rover y el receptor de referencia toman medidas que se ven afectadas por los mismos tipos de errores. La técnica de diferenciación aprovecha los errores comunes de ambos receptores para cancelarlos. A continuación, se describe cómo se estima la posición del receptor móvil (rover) con las técnicas diferenciales, mediante el uso de las medidas de pseudorango (Zabala, 2015).
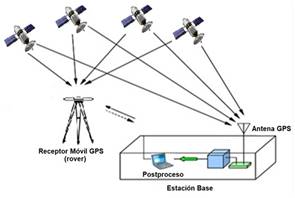
Fig. 3: Concepto de Diferencial de GPS: Estación de referencia y el rover separadas entre sí y con visibilidad de los mismos satélites en las mismas épocas.
La medida de pseudorango  expresada en unidades de longitud, que toma el receptor fijo A, en un periodo de tiempo denominado época, correspondiente al satélite i:
expresada en unidades de longitud, que toma el receptor fijo A, en un periodo de tiempo denominado época, correspondiente al satélite i:

donde  es la distancia geométrica entre el receptor y el satélite; (t
A
y (t
i
son las derivas de los relojes del receptor A;
es la distancia geométrica entre el receptor y el satélite; (t
A
y (t
i
son las derivas de los relojes del receptor A;  es una variable que contiene los errores debido al ruido del receptor A y al efecto multipath; y son los errores producidos por la ionosfera y la troposfera, respectivamente
es una variable que contiene los errores debido al ruido del receptor A y al efecto multipath; y son los errores producidos por la ionosfera y la troposfera, respectivamente
El pseudorango del rover B:

Si la distancia entre la estación de referencia y el rover se considera corta, los errores causados por la ionósfera y tropósfera son comunes o están correlacionados espacialmente. La sustracción de las medidas de los pseudorangos (16) y (17) permite la cancelación de dichos errores y se obtiene lo que se conoce como la diferenciación simple (SD).

Se ha cancelado la deriva del reloj del satélite. Al repetir el proceso para un satélite j se obtiene:

La ecuación (19) relaciona las medidas de dos receptores y dos satélites. A esto se denomina diferenciación doble (DD).

A través de esta configuración se elimina errores generados por los relojes de los satélites y receptores.
Se detalla el diagrama de flujo en la Fig. 4 del algoritmo desarrollado para la ejecución de DGPS en configuraciones simple y doble.
Error cuadrático medio
El Mean Square Error (MSE) (Kay, 1993) se utiliza para evaluar el rendimiento de un algoritmo de posicionamiento. Al considerar que se estima una posición en n veces, de modo que se tiene una población de coordenadas calculadas, (x 1, y 1),…, (x n , y n ). La media de las coordenadas calculadas es:

donde x y y son las coordenadas estimadas de la posición.
La ecuación de error cuadrático medio de la posición estimada está definida por:

El resultado de la ecuación anterior es una expresión cuadrada de error, para una mejor interpretación del error el Root Mean Square Error (RMSE) (Kay, 1993) representa la desviación estándar de la muestra de las diferencias entre los valores estimados y los valores observados. Estas diferencias individuales se llaman residuos de los cálculos ejecutados sobre la muestra de datos utilizados para la estimación y, se llaman errores de predicción cuando se calcula fuera de la muestra. El RMSE sirve para agregar las magnitudes de los errores en las predicciones varias veces en una sola medida de poder predictivo. RMSE es una medida de precisión. Para comparar los errores de predicción de los diferentes modelos para un determinado dato y no entre conjuntos de datos, ya que depende de la escala (Sanz Subirana, et-al., 2013).

Metodología
El procedimiento a seguir para el desarrollo del algoritmo de DGPS consta de etapas descritas en la Fig.5
Obtención de datos brutos
Se configura el receptor móvil mediante el software U-center (U-blox, 2017). para la extracción de datos brutos, para ello es necesario instalar el parche en la memoria volátil para la activación de la lectura de datos brutos a través de los mensajes UBX "RXM-RAW" y "RXM-SFRB" propios del dispositivo ublox. Ver Fig. 7.

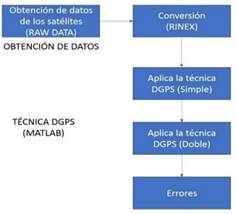
Fig. 5: Diagrama de bloques del algoritmo de DGPS: Extracción de información de las medidas pseudorango de los archivos de navegación y observación de los receptores para la diferenciación en configuración simple y doble.

Fig. 6: Señal de GPS en datos brutos: Proceso de recepción de señal de GPS en el rover u-blox NEO 6M, se prescinde de la utilización del procesador propio debido al procesamiento hecho por la computadora.
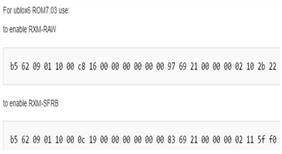
Fig. 7: Comando de activación de datos brutos: La secuencia de código activa la lectura y extracción de los datos brutos en el receptor.
Una vez parchado el receptor móvil, es necesario configurar el puerto de comunicación para la lectura y almacenamiento de los datos brutos a través de RTKNAVI que a través de la interfaz gráfica se visualiza los datos recibidos en términos de latitud, longitud, intensidad de señal y tipo de posicionamiento.

Fig. 8: GPS Estatus: La aplicación RTKNAVI se muestra la intensidad de las señales de los satélites en vista para el posicionamiento al igual que la latitud, longitud y tipo de posicionamiento
El procesamiento de la información de navegación es extraído de los datos brutos obtenidos de los receptores GPS, se trabaja bajo el formato estándar RINEX. Los dispositivos u-blox neo 6M (U-blox, 2017). no son capaces de almacenar los datos brutos y presentarlos en este formato, como se mencionó en la Sección II.B. La conversión entre formatos se realiza a través de RTKCONV que al igual que RTKNAVI son subaplicaciones de RTKlib.
Escenario y Análisis
La correlación de los errores depende de la distancia que exista entre receptores, en la recolección de datos se considera escenarios lejanos y cercanos respecto al receptor de referencia y afectados por factores de densidad de vegetación y edificios.
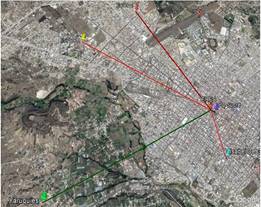
Fig. 9: Sectores urbanos de la ciudad Riobamba: Se considera cuatro sectores a distancias deferentes respecto a la estación de referencia.
Resultados
Al aplicar el algoritmo de DGPS en post-proceso en los diferentes puntos de recolección de datos, se valora la precisión que alcanza en comparación al posicionamiento estándar (Consentino & Diggle, 2006).
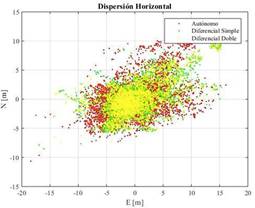
Los resultados obtenidos al aplicar el diferencial GPS en configuración simple y doble de los puntos de observación elegidos dentro de la ciudad de Riobamba en el sistema de coordenadas Norte y Este (NE) que permite la visualización de latitud y longitud de los puntos escenarios propuestos de los cuales se presenta dos de ellos en diferentes condiciones. Ver Tabla I.
Punto de Observación: ESPOCH
Se tomaron los datos en el sector de la ESPOCH, en el parque del estudiante y a una distancia de 3.44 km desde el receptor de referencia (EREC), mediante el método de posicionamiento estático y el diferencial en configuración simple y doble.
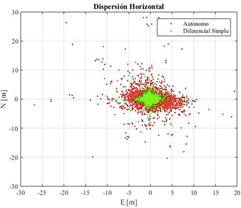
Fig. 10: Diferencial simple - ESPOCH: Comparación entre las medidas de posicionamiento autónomo y diferenciación simple.
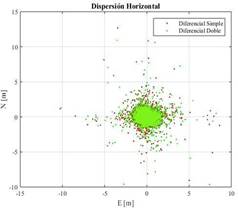
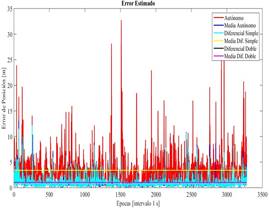
Tabla II: Error De Posición - ESPOCH
| Autónomo | Diferencial Simple | Diferencial Doble | |
| RMSE | 3.3869 | 1.0317 | 1.0163 |
| Desviación Estándar | 2.9905 | 0.9770 | 0.9614 |
| Máximo | 32.7412 | 13.1476 | 12.1553 |
| Mínimo | 0.0193 | 0.0102 | 0.0166 |
| Rango | 32.7219 | 13.1374 | 12.1388 |
| Épocas | 3280 | 3280 | 3280 |
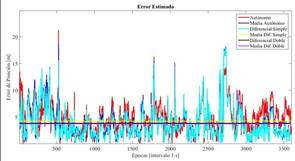
Las épocas totales en este punto fueron de 3900 que representa la dispersión total durante 65 min. El posicionamiento autónomo muestra un error 3.3869 m, al aplicar el algoritmo DGPS en diferencial simple el posicionamiento se alcanza a 1.0317 m lo que produce una reducción a través de esta técnica 2.3552 m que favorece a la reducción del 69.54% a través de la eliminación de errores comunes. En configuración doble la reducción del error alcanza a 2.3706 m que equivale al 69.99% con respecto a la media. El aporte de DD sobre SD es de 0.0154 m lo que evidencia que en el diferencial doble la reducción de los errores debidos a los relojes del satélite y del receptor son pequeños al contrario del diferencial simple que se reduce más de la mitad el error. Ver Tabla II.
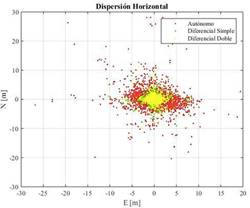
Fig. 12: Solución de posicionamiento final: Comparación de medidas sin corrección y con diferenciación simple y doble - ESPOCH
Punto de observación: Yaruquíes
Yaruquíes es una parroquia urbana ubicada en las calles vía a Cacha y 12 de Julio alejada de 3.72 km desde la estación de referencia (EREC). Los datos son medidos al utilizar el método de posicionamiento estático y el diferencial en configuración simple y doble.
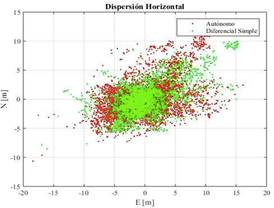
Fig. 14: Diferencial simple - Yaruquíes: Comparación entre las medidas de posicionamiento autónomo y diferenciación simple.
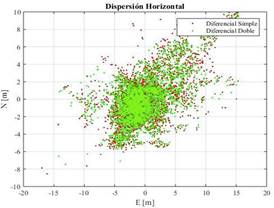
Fig. 15: Diferencial doble - Yaruquíes: Resultado de la reducción de la doble diferencia respecto a la simple
Tabla III: Error de Posición - Yaruquíes
| Autónomo | Diferencial Simple | Diferencial Doble | |
| RMSE | 4.2473 | 3.8574 | 3.7421 |
| Desviación Estándar | 2.6839 | 2.9450 | 2.8723 |
| Máximo | 21.2546 | 18.7092 | 18.1696 |
| Mínimo | 0.0512 | 0.1037 | 0.0581 |
| Rango | 21.2034 | 18.6055 | 18.1115 |
| Épocas | 6098 | 6098 | 6098 |
Las 12240 épocas medidas durante 204 min permite evaluar la precisión alcanzada por el modo de posicionamiento autónomo de valor 4.2473 m, al aplicar el algoritmo DGPS la corrección de error en el diferencial simple es de 0.3899 m lo que mejora su precisión en 9.18%. El diferencial doble muestra una reducción de error de 0.5052 m que reduce el error en un 11.89% con respecto a la media. Debido al ambiente de vegetación densa se produce errores de multipath los cuales no están correlacionados y son difíciles de eliminar. Ver Sección I.
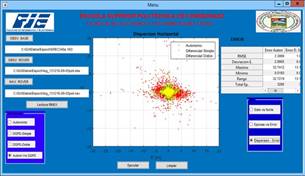
DGPS-LAB
DGPS-LAB es el software de postprocesamiento para la eliminación de errores en las medidas del receptor GPS, es creado para ser utilizado como herramienta de postproceso para la corrección de errores y soporta las configuraciones de diferencial simple y doble basado en las medidas de pseudorango. Posee una interfaz gráfica que permite cargar los archivos RINEX de la estación de referencia y del rover para su posterior procesamiento y visualización de resultados. Su utilización está limitada para fines educativos y de verificación de las técnicas en las diferentes configuraciones, no se recomienda su utilización para aplicaciones críticas. El algoritmo soporta la versión RINEX 2.11.
Conclusiones
Los receptores de bajo costo debido a factores como su arquitectura, capacidad de procesamiento y tecnología, brinda baja precisión por lo que no son ideales para aplicaciones específicas de georreferenciación. Con la implementación del diferencial de GPS en configuración simple y doble se determinó que la reducción del error respecto al posicionamiento estándar es mayor esto se debe a que existe errores correlacionados entre el receptor de referencia y el usuario y permite la eliminación de errores de gran magnitud producidos principalmente por la atmósfera y tropósfera. DGPS-LAB es una aplicación que permite cargar archivos RINEX versión 2.11 de cualquier receptor de GPS y postprocesarlo para su posterior análisis de errores. En los receptores de bajo costo se debe considerar cambiar la frecuencia de recepción de datos por defecto a 1 Hz para de esta manera forzar al dispositivo a adquirir los datos cada segundo e igualarlo a la misma frecuencia de adquisición de datos del receptor de referencia con la finalidad de evitar procesamiento innecesario y la saturación del programa. En este trabajo se determinó que existe un desfase en el intervalo de registro de datos que presentó el dispositivo U-blox NEO 6M fue de 0.9 s registrado en el fichero RINEX. Los escenarios propuestos fueron considerados debido a sus condiciones de observación y toma de datos basados en los resultados, (Ver Subsecciones IV-C y IV-B), se determina que la señal de GPS en mejor calidad para su recepción se recomienda se realice en días despejados, zonas de poca densidad de vegetación y edificios para valorar el impacto de todos los factores externos y de su influencia sobre la precisión en el posicionamiento de un rover.
DGPS-LAB está diseñado para fines educativos y de verificación de las técnicas en las diferentes configuraciones basadas en las medidas de pseudorango, en orden de alcanzar mayor precisión se optaría por la diferenciación por fase y doble frecuencia y tomar como referencia el proceso descrito. Verificar la versión del archivo de lectura ya que está limitado a la versión 2.11.

