











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
La interacción fluido-estructura o Interaction Fluid Structure ha presentado un desafío para la ingeniería, existen diversas aplicaciones que abordan la interacción de fluidos, en las cuales se presentan soluciones para su transporte (Costarelli, Garelli, Cruchaga, Storti & D’Elía, 2015; Cruchaga, Reinoso, Storti & Celentano, 2013; Ausensi, 2014) así como para la captación de energía (Beirão & dos Santos, 2014).
La energía undimotriz corresponde a la energía cinética contenida en las olas producidas en océanos y mares, su explotación consiste en utilizar equipos como las boyas que se muevan junto a las olas, accionando un bloque de potencia que está conectado a un generador eléctrico. Por lo cual en el presente trabajo se pretende estudiar el comportamiento dinámico de boyas sumergidas. Hoy en día los captadores de energía marina son uno de los principales contribuyentes al desarrollo de las energías limpias a nivel mundial, donde la energía eléctrica es obtenida sin producción de contaminación hacia el medio ambiente, una de las ventajas de este tipo de energía es que está presente las 24 horas del día durante todo el año. Dentro del análisis fluido-estructura se destaca el sloshing (Cruchaga, Muñoz & Celentano, 2008). Este concepto corresponde al estudio de la superficie libre de líquidos contenidos en estanques cuando estos se someten a oscilaciones. Es muy importante la superficie libre tanto en aplicaciones físicas como en aplicaciones de ingeniería, tales son los casos de Cruchaga, Reinoso, Storti, & Celentano (2013), en los cuales se hizo un análisis numérico y experimental del sloshing en un estanque cuadrado parcialmente lleno con aceite vegetal, en dicho trabajo se hizo un estudio numérico y experimental de problemas de sloshing tridimensional (3D) utilizando como fluido el agua (Battaglia, Cruchaga, Storti, & D’Elia, 2016).
La interacción fluido-estructura ha sido estudiada ampliamente a nivel computacional, por ejemplo, Battaglia et al. (2016), realizaron la formulación de elementos finitos de malla fija para cuerpos sumergidos en un fluido en movimiento. Por lo cuál en este trabajo se propone realizar experimentos a escala de laboratorio para el oleaje en un estanque sometido a vibraciones controladas mediante una mesa vibradora, cuyo movimiento impuesto produce un desplazamiento de la masa del fluido y después se va a incluir una boya sumergida cuya geometría es definida permitiendo investigar el comportamiento de dicho objeto producido por el movimiento de la masa de fluido.
En base a lo anterior, el presente trabajo se enfoca en el estudio de la respuesta dinámica de una boya sumergida en un estanque, teniendo como finalidad evaluar el efecto del fluido sobre un sólido (boya), además de evaluar el comportamiento del objeto sobre la superficie libre. El modelo físico en estudio corresponde a un estanque en el cual se sumerge completamente una boya de densidad menor a la del fluido del cual está inmersa. Los datos experimentales se obtuvieron utilizando sensores ultrasónicos, un tanque rectangular con relación de aspecto 1:1 y una mesa vibradora que controla el movimiento del tanque.
Metodología
Para el experimento se realizaron 95 mediciones, 34 corresponden al estudio de la superficie libre sin objeto, 33 a la superficie libre con objeto y 28 al comportamiento dinámico de la boya.
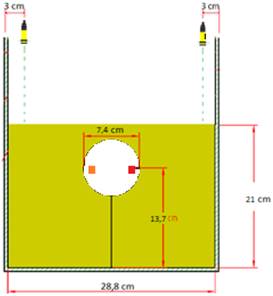
La esfera utilizada es de madera tipo pino, el cual tiene un diámetro de 7.4 cm y una masa de 138.29 g, por lo que su densidad es de 0.6517 g/c m 3 .
La superficie libre hace referencia a la interfaz generada entre un líquido y el aire, para su estudio se someterá al estanque a cargas externas de forma cíclica, produciendo el denominado sloshing, el cual se podría traducir como el chapoteo del agua, es el movimiento que se produce en la superficie libre de los líquidos contenidos en estanques cuando estos ejercen alguna oscilación o translación (Cruchaga et al., 2016).
Para el estudio de la superficie libre y el comportamiento dinámico de la boya se utilizó un estanque de acrílico de base cuadrada que contiene aceite vegetal cuya densidad es de 0.9124 g/c m 3 , el cual se coloca sobre una mesa vibradora através del cual se aplica movimientos sinuidales externos a diferentes amplitudes y frecuencias impuestas. Un movimiento en la superficie libre del fluido es generado, y de esta forma, proporciona movimiento a la boya. En la figura 1 se muestra el diseño del experimento.
La boya está sujeta a un hilo el cual está pivoteada en la base del estanque, lo cual permitirá un solo grado de libertad, donde el fluido de trabajo está sometido a condiciones atmosféricas. Los movimientos impuestos tienen amplitudes de 0.2 cm, 0.5 cm, 2 cm y 3 cm y frecuencias que varían de 0.8 Hz a 2 Hz, siendo f n la primera frecuencia natural donde f n =1.62 Hz.
Trabajo experimental
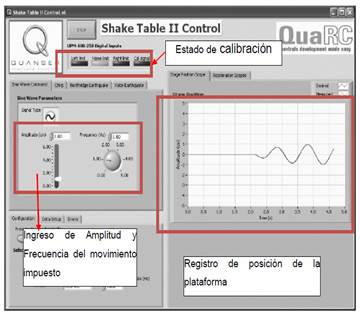
Un tanque de acrílico lleno de aceite vegetal comercial se monta en una mesa vibradora y está sujeto a vibraciones controladas. La mesa vibradora se activa mediante un motor el cual está conectado a un tornillo giratorio, que produce un movimiento que varía en una dimensión. La amplitud y frecuencia del movimiento impuesto se pueden controlar a través de un software denominado QuaRC, cuyo panel principal de interacción con el usuario se muestra en la figura 2, este software contiene rutinas hechas en simulink de Matlab (Arce & Vianna, 2009).
Para determinar la evolución de la superficie libre se utilizaron cuatro sensores ultrasónicos Banner modelo S18UUA, representados con la letra S, los cuales están colocados en la tapa del estanque, los sensores funcionan con una fuente de poder de corriente continua, y reportan una tensión de salida de 0 V y 10 V los cuales corresponden a 30 mm y 300 mm con una precisión de ±0,5 mm (Alliedelec, 2018). Si hay un error asociado con la pendiente de la superficie libre los sensores no pueden capturar correctamente la altura de la ola, por lo cual es necesario utilizar la captura de imagen para obtener los valores perdidos por los sensores. Para establecer el comportamiento dinámico de la boya se utilizó una cámara de alta velocidad AOS QPRI, la cual es capaz de grabar una gran cantidad de fotogramas por segundo (en inglés frames per second y abreviado FPS) (AOS Technologies, 2018).
2.2 Adquisición de imágenes
Mediante el uso de la cámara de alta velocidad se establece la posición del sistema, tanto de la boya como del estanque, para lo cual se utilizaron 3 marcadores. Para todos los ensayos se utilizó una resolución de 1100 x 1100 pixeles, mientras que la velocidad de captura (fps) varía para cada estado del movimiento de la superficie libre tal como se detalla en la tabla 1. El código usado fue programado en Python con la librería OpenCV (Python, 2013). Para procesar las grabaciones se debe de dividir cada video en fotogramas mediante el programa ffmpeg (Soto, 2014). Se analiza el primer fotograma mediante el software de uso libre Gimp, para definir las regiones de interés, como son los marcadores y la boya, una vez definidos los parámetros se ejecuta el programa en Python, el cual procesa cada fotograma.
2.3 Comparación del método de captura de imagen y sensor ultrasónico
En la figura 3 se muestra la gráfica obtenida al superponer los datos por el sensor ultrasónico y los obtenidos por el procesamiento de imagen, en ambos métodos se estableció la posición de la mesa para una amplitud de 3 cm.
2.4 Frecuencia natural analítica de la superficie libre
La frecuencia natural está representada por la ecuación (1), según lo propuesto por (Faltinsen, Rognebakke, & Timokha, 2005) la cual es usada para cualquier geometría del estanque sea cuadrada o rectangular.

Donde los subíndices 𝑖, 𝑗 corresponden a los modos de oscilación de la superficie libre en el largo y ancho respectivamente, las constantes normalizadas 𝑔 ∗ y 𝐻 ∗ están definidas en las ecuaciones (2) y (3) respectivamente.
Finalmente, el término 𝜆 𝑖,𝑗 contempla la oblicuidad del movimiento la cual está definida en la ecuación (4).



Donde 𝑔 es la constante de gravedad, 𝐻 representa la altura de llenado del fluido y 𝑆 es la relación de aspecto, la que se define como el cociente entre el largo del estanque sobre el ancho de este mismo. Las primeras frecuencias naturales de la superficie libre a diferentes alturas de llenado se presentan en la tabla 2.

Tabla 2: Primera frecuencia natural analítica de la superficie libre.
| H [m] |
 [Hz] [Hz] |
| 0.05 | 11.601 |
| 0.1 | 14.692 |
| 0.21 | 16.287 |
| 0.25 | 16.385 |
donde 𝑤=0.288 𝑚.
2.5 Frecuencia natural analítica de la boya
El modelo presentado corresponde a una boya sumergida confinado de acuerdo al desarrollo presentado por (Ausenci et al., 2014). En la figura 4 se presenta la descripción geométrica del sistema.
La frecuencia natural en términos de las densidades y coeficientes de masa agregada están expresadas en la ecuación (5).


Donde 𝑆 corresponde a la relación de densidades entre la boya y el fluido, mientras que 𝑐 𝑎 es el coeficiente de masa agregada y cuyo valor está en el rango de 0.45-0.55 según (Cruchaga et al., 2016), aunque esos valores corresponden para el agua como fluido de trabajo y considerando el sistema como confinado.

Resultados y discusión
La diferencia en la amplitud de onda alcanzada por la superficie libre con y sin presencia de la boya se detallan en los siguientes gráficos. En la figura 5, se muestra la evolución de la altura de la superficie libre para los cuatro sensores, para el análisis completo para las frecuencias impuestas de 0.9 Hz y amplitud impuesta de 2 cm y 3 cm.
El régimen inicial transitorio se puede identificar durante la vibración forzada en especial para la amplitud impuestas de 2 cm. Se ve un régimen de descomposición amortiguado después de que se detiene la vibración de la mesa.
Una comparación de la altura de ola de la superficie libre se presenta en la figura 6, en donde los símbolos vacíos corresponden a valores de amplitud para la superficie libre sin la presencia de la boya, mientras que los símbolos llenos corresponden a los valores de amplitud de la superficie libre con la presencia de la boya. Para una amplitud de 0.2 cm, para las mediciones inferiores a 1.40 Hz y para mediciones superiores a 1.7 Hz, las alturas alcanzadas por la superficie libre con y sin la presencia de la boya son del mismo orden, mientras que para una frecuencia cercana a resonancia es decir 1.45 Hz las alturas son menores con la presencia de la boya, representando una diferencia aproximada de 2 mm en los valles y crestas.
Finalmente, para una frecuencia de 1.7 Hz mayor a la natural para el primer modo se observa que la altura alcanzada por la superficie libre es mayor con la presencia de la boya, presentando una diferencia aproximada de 2 mm.
Para una amplitud de movimiento de 0.5 cm, las alturas alcanzadas por la superficie libre con y sin la presencia de la boya para las mediciones inferiores a 1.4 Hz son del mismo orden, mientras que para la frecuencia de 1.45 Hz las alturas alcanzadas son mayores con la presencia de la boya, representando una diferencia aproximada de 7 mm para las crestas, mientras que para los valles presenta una diferencia aproximada de 4 mm.
Para una amplitud de 2 cm, las alturas alcanzadas por la superficie libre con y sin la presencia de la boya para las mediciones inferiores a 1 Hz son del mismo orden, mientras que, para las frecuencias de 1.2, 1.25 y 1.3 Hz la altura alcanzada por la superficie libre varia en los valles con una diferencia aproximada de 4, 6 y 10 mm respectivamente, mientras que para las crestas son aproximadamente del mismo orden con y sin presencia de la boya.
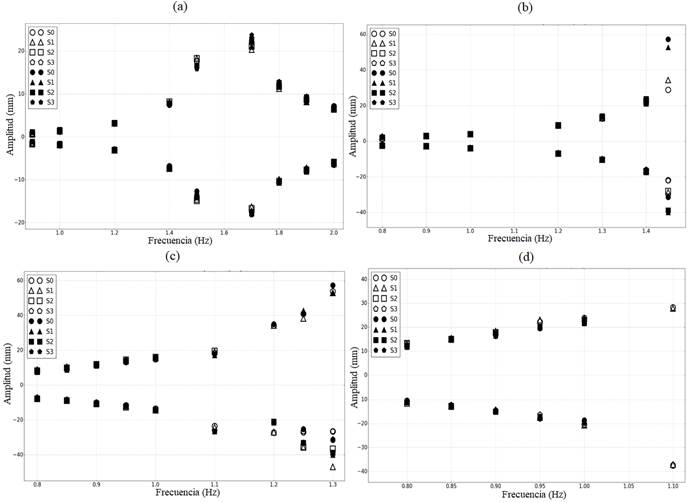
Figura 6: Comparación de altura de la superficie libre para diferentes amplitudes impuestas.(a) 0.2 cm. (b) 0.5 cm. (c) 2 cm. (d) 3cm.
Finalmente, para una amplitud de 3 cm, las alturas alcanzadas por la superficie libre con y sin presencia de la boya para las mediciones inferiores a 1 Hz son aproximadamente del mismo orden, para los casos de 1.1 Hz no se pudo establecer una comparación ya que la superficie libre humedece los sensores con la presencia de la boya, lo que ocasiona una lectura errónea de las alturas.
3.1 Desplazamiento de la boya
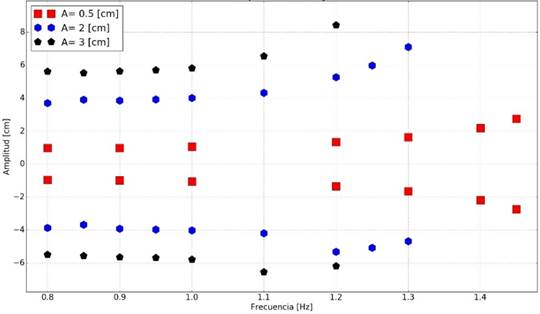
En la figura 7, se muestran los valores máximos del desplazamiento en la dirección x para la boya sumergida en estado estacionario para una amplitud de movimiento de 0.2 cm. El desplazamiento de la boya aumenta de forma simétrica hasta llegar a la frecuencia natural de la superficie libre, para después disminuir su amplitud.
En la figura 8, se muestran las amplitudes máximas y mínimas para la boya en estado estacionario, la amplitud alcanzada por la boya para una amplitud de 0.5 cm es de forma simétrica, es decir que tiene la misma amplitud del lado derecho e izquierdo.
Mientras que, para los casos de 2 y 3 cm de amplitud, a medida que aumenta la frecuencia, la boya se desplaza más hacia el lado derecho del estanque y el desplazamiento del lado izquierdo es menor.
En la figura 9, se muestra el desplazamiento de la boya en estado estacionario para un movimiento plano, en donde sigue una misma trayectoria, mientras que en la figura 10 se observa un movimiento giratorio debido a la aparición de los denominados efectos 3D, en donde el trayecto de la boya no es igual.



4 Conclusión
Se analizó la evolución de la superficie libre sin boya con las técnicas de medición con sensores ultrasónicos y captura de imagen. Se obtuvo la primera frecuencia natural la cual es coherente con el modelo analítico de Faltinsen (2005), y con el estudio experimental, presentando un error de 1,82 %. Se pudo apreciar una influencia de la amplitud impuesta en la evolución de la superficie libre, se verifico que la magnitud de olas es proporcional a la amplitud de movimiento impuesto, ya que al aumentar este parámetro favorece a la aparición de efectos 3D en la superficie.
Se observó la influencia de la boya en la evolución de la superficie libre, en los casos en los que se utilizó una mayor frecuencia con la presencia de la esfera la superficie alcanza mayor amplitud, lo cual pudo ser ocasionado por la cercanía que existe entre el cuerpo y la superficie. Se pudo caracterizar el comportamiento dinámico de la boya al ser excitada de forma sinusoidal con la mesa vibradora, determinando los desplazamientos de la esfera en los tres estados de movimiento, en cuanto al desplazamiento, llama la atención que para amplitudes y frecuencias altas la boya presenta mayor desplazamiento hacia el lado derecho.
La viscosidad del aceite favorece a movimientos planos de la boya, a diferencia del caso en donde la frecuencia impuesta corresponde a la natural para la superficie libre, en el cual presenta un comportamiento tridimensional. Además, se observó que en algunos casos en el estado estacionario la frecuencia de oscilación de la boya es cercana a la frecuencia impuesta en la mesa.

