











 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
La recuperación retardada de tensión inducida por falla (FIDVR, por sus siglas en inglés) representa un problema creciente en los sistemas de potencia modernos [2]. Varios estudios atribuyen que el fenómeno FIDVR usualmente ocurre en áreas con cargas dominadas por motores de inducción de torque constante. Estos motores pueden llegar a bloquearse en repuesta a bajas tensiones asociadas con fallas en el sistema demandando excesiva potencia reactiva de la red y agravando aún más el desbalance entre la potencia reactiva generada y demandada. Eventos severos de FIDVR pueden conllevar a un colapso rápido de tensión [3], [1].
Las soluciones para mitigar el fenómeno de FIDVR son generalmente clasificadas en dos categorías, desde el lado de la oferta y desde el lado de la demanda de la energía eléctrica. La solución que ha tenido mayor aplicación desde el lado de la oferta es la implementación de dispositivos FACTS, incluidos SVCs y STATCOMs debido a su funcionalidad de compensación de potencia reactiva de respuesta rápida transitoria [4], [5]. También otro de los recursos utilizados en esta categoría es la reserva dinámica de potencia reactiva de generadores locales [6], [7]. Por otra parte, las soluciones del lado de la demanda corresponden a la implementación de esquemas de desconexión de carga por baja tensión (UVLS) los cuales son ampliamente utilizados como una medida efectiva y económica para hacer frente a fenómenos FIDVR [8].
En los últimos años, se han propuesto varios esquemas UVLS para mejorar el fenómeno FIDVR, los cuales tienen diferentes características, por ejemplo, centralizados o descentralizados, estáticos o dinámicos, de bucle cerrado o abierto, basados en decisiones algorítmicas o en reglas. Cualquiera que sea el criterio de diseño, el instante de activación, la ubicación y la cantidad de desconexión de carga son factores claves estrechamente relacionados entre sí [9], [8].
En [10] realizan un esquema UVLS basado en los valores de magnitud de tensión y en su tasa de variación. En [11] diseñan un esquema UVLS centralizado donde monitorean el valor de tensión en barras piloto y según la desviación y periodo de tiempo de este valor, luego de ocurrida una falla, el esquema se activa. Estos trabajos, al igual que [12] se enfocan en el modelamiento de carga motórica para poder comprobar la existencia del fenómeno FIDVR luego de ocurrida una gran perturbación.
En base a lo expuesto, los esquemas de desconexión de carga para mejorar el fenómeno FIDVR normalmente son diseñados sobre la base del modelamiento dinámico de los motores de inducción analizando la variación de valores de magnitud de tensión en diferentes barras del sistema ante diferentes tipos de contingencias. Sin embargo, la variable magnitud de tensión no siempre es adecuada para ajustar de forma efectiva los parámetros del esquema de control.
En este trabajo se propone un esquema de desconexión de carga centralizado que considera el comportamiento de la carga dinámica del sistema (motores de inducción) para decidir la ubicación de desconexión de carga y mitigar el fenómeno FIDVR de una manera más eficaz.
El artículo está organizado de la siguiente manera. En la sección 2 se presenta el fenómeno FIDVR, la causa que lo origina, y los criterios utilizados para detectar su ocurrencia. En la sección 3 se presenta la metodología de ubicación de carga a desconectar basada en el comportamiento dinámico de los motores de inducción. En la sección 4 se presentan los resultados de la metodología propuesta para decidir acciones de desconexión de carga que mitiguen el fenómeno FIDVR en el sistema de prueba New England de 39 barras. Finalmente, se presentan las conclusiones.
FAULT-INDUCED DELAYED VOLTAGE RECOVERY - FIDVR
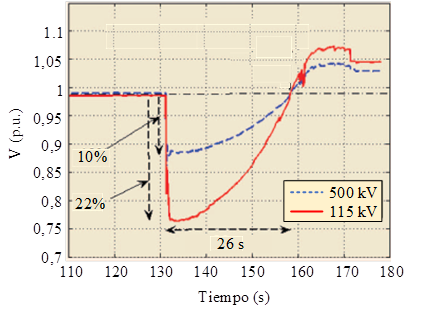
El fenómeno FIDVR es una condición de tensión iniciada por una falla de transmisión, subtransmisión o distribución y se caracteriza cuando la tensión permanece en niveles reducidos durante un periodo determinado que corresponde al marco de tiempo del corto plazo (desde pocos ciclos hasta incluso varios segundos) [13]. La Fig. 1 presenta el fenómeno FIDVR en barras de tensión de 500 y 115 kV luego de haber ocurrido una perturbación en el sistema SCE (South California Edison) de EEUU.
Generalmente, el fenómeno FIDVR se desarrolla en situaciones donde los motores de inducción constituyen una gran proporción de la carga en el sistema eléctrico. En este sentido, los motores de inducción representan un factor importante en el desarrollo de este fenómeno, siendo entonces oportuno realizar su correspondiente análisis.
Motores de Inducción (MI)
Aproximadamente alrededor del 50 al 70% de toda la electricidad es consumida por motores eléctricos, de los cuales alrededor del 90% son motores de inducción [14].
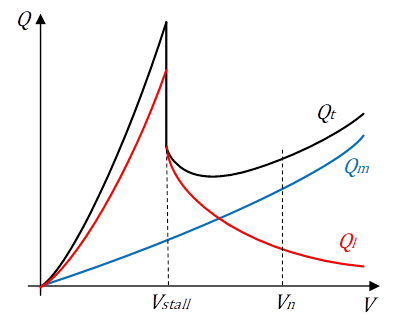
Para entender las características del motor de inducción y su papel en el fenómeno FIDVR se recurre a la característica Q-V del motor de inducción. De acuerdo al modelo propuesto en [3], la potencia reactiva demandada por el motor está dada por (1) y (2), y su representación gráfica se observa en la Fig. 2.


Donde Q m y 𝑸 𝒍 corresponde a la potencia reactiva de magnetización y consumo del MI; 𝑽 y 𝒔 son la tensión y el deslizamiento; 𝑿 𝒎 , 𝑿 𝒔 y 𝑿 𝒓 son las reactancias de magnetización, del estator y rotor; 𝑹 𝒔 y 𝑹 𝒓 son la resistencia del estator y rotor.
La Fig. 2 muestra las curvas 𝑸 𝒍 , 𝑸 𝒎 y 𝑸 𝒕 como funciones de la tensión. Se puede observar que 𝑸 𝒍 se incrementa gradualmente a medida que la tensión disminuye hasta el punto donde el motor se bloquea en 𝑽= 𝑽 𝒔𝒕𝒂𝒍𝒍 donde presenta un incremento abrupto. Así mismo, observando la curva 𝑸 𝒕 vs. 𝑽, se determina: 1) cuando la tensión es cercana a la tensión nominal del MI, 𝑽 𝒏 , la pendiente de la curva es positiva lo que implica que la reducción de la tensión causa disminución en la demanda de potencia reactiva; 2) la curva entre la tensión nominal y la tensión de bloqueo es relativamente plana lo cual significa que en esta región la sensibilidad de tensión es baja; 3) cuando la tensión se reduce aún más que el valor de bloqueo, la demanda de potencia reactiva se incrementa rápidamente a valores extremadamente altos [14].
Mecanismo del fenómeno FIDVR
Cuando ocurre una falla en el sistema eléctrico, debido a las bajas tensiones, las cargas motóricas de inducción tienden a encontrarse en condiciones de rotor bloqueado en donde consumen de 5 a 6 veces la corriente de operación de estado estable, por lo tanto, demandan mucha mayor potencia reactiva instantánea como se observó en el análisis de la característica Q vs. V. Si los sistemas de regulación y soporte de tensión no son capaces de entregar la potencia instantánea requerida por la carga, las curvas del par mecánico y eléctrico de los motores no se interceptan, la tensión no se puede recuperar e incluso se puede reducir aún más. Luego, la recuperación retardada de tensión puede extenderse a regiones cercanas y hacer que los generadores se disparen o que las salidas de potencia reactiva de los generadores se reduzcan por actuación de los limitadores de sobreexcitación hasta eventualmente, producir un colapso de tensión en el sistema [3]. Por lo tanto, los motores de inducción usualmente son la fuerza motriz responsable de la recuperación retardada de tensión en los sistemas eléctricos [1].
Criterio de Recuperación de Tensión Transitoria (TVRC)
Para hacer frente al fenómeno FIDVR, las compañías eléctricas siguen ciertos criterios de recuperación de tensión transitoria (TVRC, por sus siglas en inglés) para limitar la caída de tensión luego de una falla. Existen varios criterios propuestos por la bibliografía los cuales son aplicados de acuerdo al sistema donde se requiera su implementación. Por ejemplo, varios trabajos han considerado el TVRC de acuerdo a los estándares de planificación de WECC/NERC [15] y otros han considerado el TVRC desarrollado para un sistema de transmisión en particular como PJM [16].
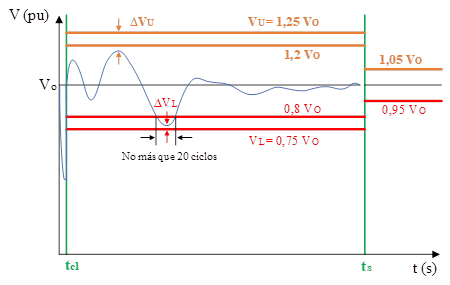
El TVRC según WECC/NERC indica que para contingencias de tipo N-1 se espera que la variación de tensión transitoria posterior a la falla cumpla los siguientes criterios:
La desviación de tensión posterior a la falla no debe exceder el 𝐷 1 % con respecto a la tensión pre falla.
La duración de la caída de tensión posterior a la falla > 𝐷 2 % no debe exceder L ciclos.
La desviación de tensión post transitoria (a partir de 𝑡 𝑠 segundos) no debe exceder el 𝐷 3 %.
Los parámetros típicos de este criterio se encuentran representados en la Fig. 3 y son detallados a continuación:
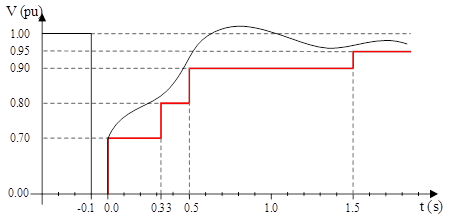
Por otra parte, el TVRC según PJM indica que la recuperación de tensión luego de contingencias de tipo N-1, no debe superar los umbrales definidos representados en la Fig. 4.
Este trabajo considera el TVRC1 de acuerdo a los estándares de planificación WECC/NERC el cual ha mostrado ser adecuado para detectar el fenómeno FIDVR en [5].
ESQUEMA DE DESCONEXIÓN DE CARGA BASADO EN EL COMPORTAMIENTO DINÁMICO DE LOS MI
Los esquemas de desconexión de carga son acciones de control y protección caracterizados por ser económicos y efectivos. El instante de activación, la ubicación y la cantidad de carga a desconectar representan parámetros de ajuste claves para reducir los desbalances de potencia provocados por la salida de un generador, el disparo de una línea o un incremento brusco de carga [17].
Los esquemas de desconexión de carga por baja tensión (UVLS) diseñados para mitigar el fenómeno FIDVR son ampliamente utilizados y se caracterizan por ser sus parámetros ajustados en base a valores de magnitud de tensión de determinadas barras pre definidas.
En este trabajo se utilizan los valores de magnitud de tensión obtenidos de mediciones PMU, cuya tasa de muestro es compatible con las simulaciones dinámicas efectuadas, para detectar la ocurrencia del fenómeno FIDVR y el comportamiento dinámico de los MI para identificar las ubicaciones más efectivas de la carga a desconectar, bajo un esquema centralizado que opera en el centro de control. El comportamiento dinámico de los MI es analizado a través de la variable velocidad de rotación, la cual refleja los diferentes estados que experimentan los motores (aceleración, desaceleración o permanencia sin cambios) y que, naturalmente se puede utilizar como un indicador de ubicación del fenómeno FIDVR [1].
El análisis para determinar y categorizar los MI causantes del fenómeno FIDVR y por ende las ubicaciones en donde se realizará la desconexión de carga se efectúa a partir de identificar los MI que superan su velocidad crítica durante o luego de despejada la falla, como se muestra en la Fig. 5, lo cual señala a los motores en estado de bloqueo y/o re aceleración.
El cálculo de la velocidad crítica 𝝎 𝒄𝒓 se realiza a partir de (3), donde la resistencia y reactancia del rotor 𝑹 𝒓 y 𝑿 𝒓 así como la reactancia del estator 𝑿 𝒔 corresponden a valores propuestos por [18] para modelar el comportamiento de un conjunto de MI agregados en sistemas a nivel de transmisión. La velocidad crítica se caracteriza por ser importante en la dinámica del motor, además es constante y no depende de la tensión [1].

En base a simulaciones dinámicas realizadas fuera de línea se compara la velocidad de rotación de los MI con su velocidad crítica en distintos escenarios de carga y ante la ocurrencia de un conjunto de perturbaciones (las de mayor probabilidad de ocurrencia en el sistema), con el fin de determinar para cada perturbación una lista de mérito de las barras que corresponden a la ubicación más efectiva de desconexión de carga para la perturbación analizada.
El procedimiento de desconexión de carga basado en el comportamiento de los motores de inducción (MILS, por sus siglas en inglés) se observa en el diagrama de flujo de la Fig. 6. Primeramente, para detectar el fenómeno FIDVR se utilizan valores de magnitud de tensión que son comparados con los umbrales definidos por el criterio TVRC1. En este sentido, se utiliza (4) propuesta en [10] en donde por medio de aproximación lineal se calcula de forma predictiva el tiempo 𝑻 𝒓𝒆 que tardaría la tensión en superar cierto umbral de tensión.


Figura 5: Velocidad de rotación de MI (a) recuperación rápida; (b) recuperación lenta; (c) recuperación fallida [1]
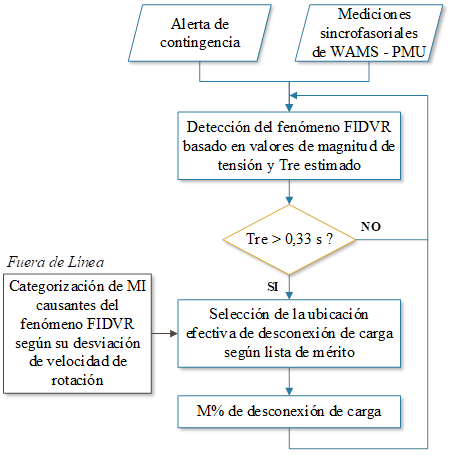
Luego se procede a seleccionar la ubicación de las cargas a desconectar de la lista de barras candidatas determinadas fuera de línea y finalmente, se ejecuta la desconexión de carga en la ubicación seleccionada con un %M de cantidad de carga a desconectar.
En la primera desconexión al ser la más importante y con mayor requerimiento de efectividad se propone desconectar el 50% de carga conectada a la barra seleccionada en 0,05 s luego del despeje de falla. La segunda desconexión en caso de que se determine por medio de la evaluación de 𝑻 𝒓𝒆 que el fenómeno FIDVR persiste, será en la siguiente barra de la lista con el 25% de la carga conectada a esa barra en 0,15 s luego del despeje de falla. En caso de que el fenómeno FIDVR aún persista en base a los resultados de la evaluación de 𝑻 𝒓𝒆 , se seguirá el mismo procedimiento con la desconexión del 25% de carga con tiempos de retardo de activación de 0,10 s con respecto a la desconexión previa.
Este procedimiento dependerá del número de MI identificados en estado de bloqueo y/o re aceleración, así como del resultado de la mitigación del fenómeno FIDVR evaluada a través de 𝑻 𝒓𝒆 .
RESULTADOS DE CASO DE ESTUDIO
A continuación, se presenta un caso de estudio donde ocurre el fenómeno FIDVR ante una gran perturbación. El sistema de prueba corresponde al IEEE New England de 10 generadores, 39 barras, 60 Hz a 345 kV. La carga total es de 2185 MW y 485 MVAr con el modelamiento de motores de inducción equivalentes como cargas dinámicas en las barras 8, 4, 15, 20, 24 y 28. La falla que provoca la ocurrencia del fenómeno FIDVR es de tipo trifásica en la línea de transmisión 16-17 como se muestra en la Fig. 7.

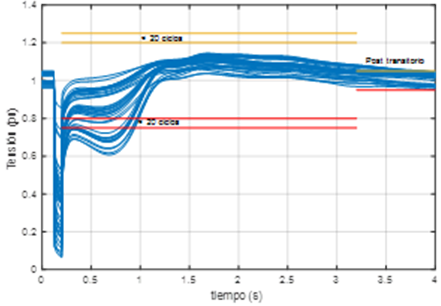
Como se puede observar en las Fig. 8, en muchas de las barras del sistema ocurre el fenómeno FIDVR superando los umbrales inferiores definidos por TVRC1. Para mitigarlo, se implementa el esquema MILS y se lo compara con el esquema convencional UVLS.
El esquema convencional UVLS consiste de cuatro etapas y se implementa de la siguiente manera. Etapa 1: desconexión del 10% de la carga 0,05 s luego del despeje de falla; etapa 2: desconexión del 5% de la carga 0,15 s luego del despeje de falla; etapas 3 y 4: de forma idéntica a la segunda etapa, exceptuando el tiempo de operación en 0,25 y 0,35 s luego del despeje de falla respectivamente. Las ubicaciones de desconexión corresponden a las barras de carga donde mayor desviación de tensión exista. Cada etapa tendrá una señal efectiva de activación según el resultado del tiempo predictivo de recuperación de tensión  .
.
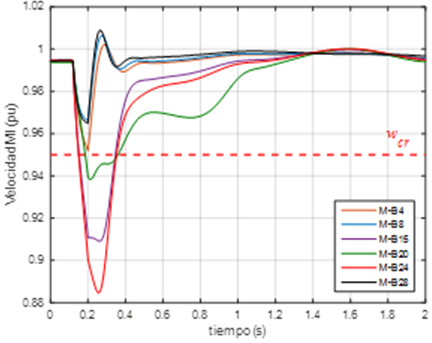
En cambio, el esquema MILS se implementa de acuerdo a la determinación y categorización fuera de línea de los MI causantes del fenómeno FIDVR. Para ello, a través de simulaciones dinámicas se obtiene el comportamiento de la velocidad de rotación de los MI conectados al sistema ante la ocurrencia de la falla trifásica en la línea 16-17 (Fig. 9).
Como se puede observar en la Fig. 9, los MI conectados a las barras 24, 15 y 20 superan su velocidad crítica y tardan más tiempo en recuperar su velocidad en comparación con el resto de MI. Por lo tanto, se determina que estos MI son los causantes del fenómeno FIDVR y se ordenan en la lista de mérito de acuerdo a su desviación de velocidad, es decir 1: MI-B24, 2: MI-B15, 3: MI-B20.
Por lo tanto, el esquema MILS propuesto consiste en que cuando la contingencia ocurra y se detecte la presencia del fenómeno FIDVR a través de la evaluación de 𝑻 𝒓𝒆 , se realice la primera desconexión del 50% de carga conectada a la barra 24 en 0,05 s luego del despeje de falla. Luego si el fenómeno aún persiste con 𝑻 𝒓𝒆 mayor a 0,33 s se efectúa una segunda desconexión del 25% de carga conectada a la barra 15 en 0,15 s luego del despeje de falla. Finalmente, en caso de que 𝑻 𝒓𝒆 aún sea mayor a 0,33 s y por lo tanto el fenómeno FIDVR se mantenga se realiza la última desconexión del 25% de carga conectada a la barra 15 en 0,25 s luego del despeje de falla.
Los resultados obtenidos de la aplicación del esquema MILS y del esquema UVLS se resumen en la Tabla 1, y la respuesta de tensión en la barra con mayor desviación de tensión se presenta en la Fig. 10.

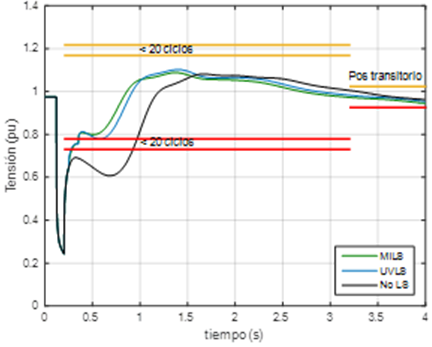
En la Tabla 1 y la Fig. 10 se puede observar que ambos esquemas requirieron la activación de dos etapas de desconexión. Mediante la implementación del esquema UVLS es posible mitigar el fenómeno FIDVR, pudiendo recuperarse la tensión dentro de los 0,33 s especificado por el criterio luego del despeje de falla. Sin embargo, para lograr este objetivo el esquema UVLS ha tenido que ejecutar las dos primeras etapas de desconexión correspondientes a 327 MW, es decir el 15% del total de la carga en el sistema.
En cambio, la implementación del esquema MILS mitiga el fenómeno FIDVR de una manera más eficaz que el esquema UVLS debido a que la tensión se recupera por encima de 0,8 𝑽 𝟎 pu dentro de los 0,33 s luego del despeje de la falla cumpliendo con TVRC1, y además solamente requiere la desconexión de 137 MW, es decir el 6% del total de la carga en el sistema.
En la Fig. 11 se observa que luego de haber ejecutado el esquema MILS, la recuperación de tensión en todas las barras del sistema cumple el criterio TVRC1 y a la vez, para efecto de prueba, como se puede observar en la Fig. 12 también cumple con el criterio TVRC2.


CONCLUSIONES Y RECOMENDACIONES
La identificación de la carga motórica de inducción causante de la aparición del fenómeno FIDVR representa un aspecto muy importante para orientar de forma efectiva el ajuste de los parámetros de un esquema de desconexión de carga. En este caso, la determinación de los MI causantes del fenómeno FIDVR se ha realizado a través del análisis de su velocidad de rotación. Se ha determinado que los MI que superan su velocidad de rotación crítica durante o luego de despejada la falla son los causantes del fenómeno y por ende deben ser desconectados. Los resultados demuestran que definir la ubicación de la carga a desconectar en base al comportamiento de los MI permite mitigar de forma efectiva el fenómeno FIDVR requiriendo solamente del 6% de desconexión del total de carga y a su vez cumpliendo con criterios TVRC post falla.
El uso de la tecnología WAMS-PMU, utilizada en este trabajo para detectar el fenómeno FIDVR a través del análisis de las mediciones de magnitud de tensión, podría extenderse a la identificación en tiempo real de los MI causantes del fenómeno FIDVR. Es en esta dirección que se continuará investigando con el fin de lograr el desarrollo de un esquema de desconexión adaptable según las condiciones y respuesta del sistema ante diferentes tipos de contingencias.

