











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
Las subestaciones eléctricas son instalaciones compuestas por equipos necesarios para ejecutar transformaciones de tensión, frecuencia, cantidad de fases o unión de circuitos; este tipo de equipamiento suele situarse cerca de centrales de generación de energía o en zonas no urbanas [1, 2]. Para garantizar una adecuada calidad del suministro eléctrico, se requiere que este tipo de equipos se mantengan en funcionamiento la mayor parte del tiempo de su vida útil [3, 4]. Es común que las fallas en las subestaciones eléctricas vengan precedidas por la aparición de lo que los especialistas denominan puntos calientes; los cuales son elementos que presentan una temperatura por encima de su operación normal, comparado con otro equipo de similares características y condiciones de funcionamiento [5].
Normalmente, los puntos calientes se producen por aumento de la resistencia eléctrica en un circuito; el mismo que puede provenir a causa de suciedad, falsos contactos, sobrecorrientes, desbalance de carga, pérdida de aislamiento, etc. Un punto caliente no es apreciable a simple vista, por lo que se requiere del uso de técnicas especiales, como la termografía infrarroja; sin embargo, el análisis debe realizarse de manera manual por un experto o especialista en el área, lo cual implica una considerable inversión de tiempo, además de posibles errores humanos en el diagnóstico [6].
Esta es una técnica no invasiva para la medición de la temperatura en diversos objetos, la cual no requiriere de contacto físico directo con los mismos. Para lograr esta medición, se emplea la captura de la radiación infrarroja del espectro electromagnético utilizando cámaras termográficas, las cuales generan imágenes en el espectro infrarrojo [7].
La inteligencia artificial (IA) es una disciplina que ha tenido gran repercusión tecnológica en los últimos años; siendo aplicable en diversos sectores, entre los cuales se encuentra el eléctrico [8]. La combinación de termografía y técnicas de IA abarcan una amplia gama de aplicaciones. Estas incluyen el mantenimiento predictivo en entornos industriales, evaluación de estructuras edificadas, identificación de pérdidas energéticas, detección de puentes térmicos, localización de emisiones gaseosas, identificación de áreas con temperaturas elevadas, investigaciones médicas, pronósticos meteorológicos, aplicaciones militares, entre otras [9].
La detección de objetos forma parte de la IA y visión por computadora, buscando detectar uno o varios objetos, ya sea en formato de imagen o video. En la detección de objetos se encuentran algoritmos clasificados en dos grandes grupos (i) Extracción manual (handcrafted features) y (ii) Extracción automática (basada en deep learning o aprendizaje profundo); esta última se divide en algoritmos de detección de objetos de una y dos etapas, siendo la primera la que presenta detecciones en un menor tiempo (ver Figura 1), [10].
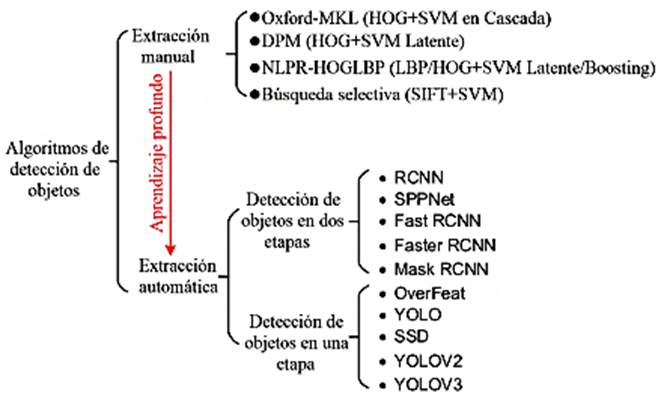
YOLO (abreviatura de “You Only Look Once”) es uno de los principales algoritmos de detección de objetos. En comparación a otros algoritmos como SSD o Faster R-CNN, se emplea para la detección y reconocimiento en tiempo real de múltiples objetos. YOLO aborda la detección como un problema de regresión y proporciona probabilidades asociadas a cada clase detectada en una única ejecución del algoritmo. Las ventajas clave de YOLO incluyen (i) rapidez, posibilitando la detección en tiempo real; (ii) precisión destacada debido a su baja tasa de errores; y (iii) notable capacidad de aprendizaje [12].
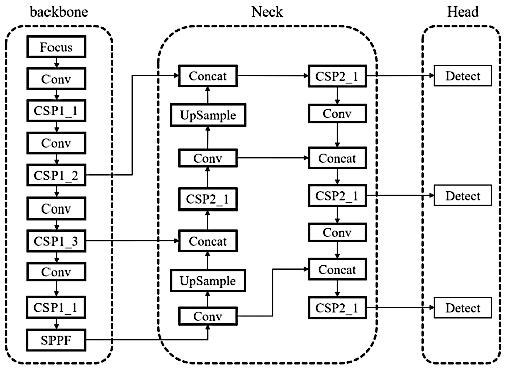
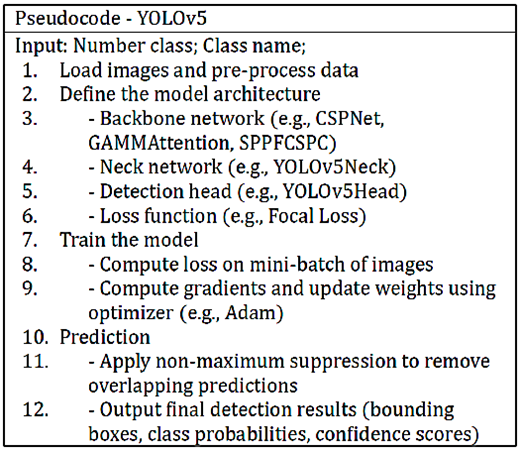
YOLOv5 representa la quinta generación del algoritmo YOLO, siendo un detector de una sola etapa, y una de las opciones más viables si se desea realizar detección de objetos en tiempo real (FPS) [13]. La Figura 2 muestra la arquitectura de YOLOv5, en la que se aprecian las capas personalizadas del algoritmo, compuestas principalmente por convoluciones y maxpooling; además, en la Figura 3, se aprecia su pseudocódigo.
Matemáticamente (véase la ecuación (1)), el modelo predice las coordenadas bx, bx, bw, bh de las cajas delimitadoras y la confianza C, de que hay un objeto en cada celda de una cuadrícula SxS, donde cada celda se encarga de detectar los objetos presentes en su interior.
Estas predicciones se obtienen aplicando una función sigmoide (σ) a la salida de una red neuronal, donde W representa los pesos de la red neuronal, f(x) la entrada, y b el sesgo. El modelo realiza estas predicciones para B cajas, lo que le permite detectar múltiples objetos en una sola pasada, haciéndolo eficiente para la detección en tiempo real. YOLOv5 emplea principalmente tres técnicas: (i) utilización de bloques residuales, (ii) regresión de bounding box, e (iii) intersección sobre unión (IOU) [15]. La combinación de estas tres técnicas genera resultados como los ilustrados en la Figura 4.


A continuación, se presentan algunos estudios previos del tema en cuestión.
Con el propósito de garantizar la seguridad en sistemas de energía eléctrica, se investigó una red neuronal convolucional (CNN) basada en el algoritmo de detección de objetos YOLO. Se realizaron predicciones referentes a las coordenadas, el ángulo de orientación y la clasificación de cada componente del equipo. Los resultados experimentales indicaron que el enfoque es resistente al ruido, logrando un nivel de precisión del 93,7 % mediante el empleo de una unidad de procesamiento gráfico (GPU) durante la fase de entrenamiento [16].
Un equipo de potencia es una parte importante del sistema de energía, además del foco de operación y mantenimiento. Li [17] menciona que la tecnología de detección de anomalías por infrarrojos es un medio eficaz para detectar fallas en equipos eléctricos debido a su seguridad, simplicidad e intuición. Se planteó la aplicación de YOLOv3 mediante un conjunto de imágenes infrarrojas recopiladas en campo, obteniéndose un valor mAP (Mean Average Precision) de 34,63 % y una tasa de recuperación de 21 %.
Greco et al. [18] señalan que las fallas suelen aparecer como puntos calientes en la superficie de paneles fotovoltaicos, por lo que se estudió el problema de detección de puntos calientes utilizando YOLO, demostrándose que el algoritmo en cuestión presenta una capacidad eficaz y eficiente para llevar a cabo la segmentación de paneles en una imagen. Se efectuó una evaluación cuantitativa, y se realizó una comparación con enfoques previamente establecidos para la detección de paneles fotovoltaicos. Los resultados experimentales obtenidos corroboraron la robustez y eficacia de YOLO.
El uso de CNN requiere una alta capacidad computacional y de memoria. Nguyen et al. [19] propusieron un método de detección de objetos basado en una CNN y YOLO; para ello, se consideró el formato de etiquetado PASCAL VOC. El modelo alcanzó un valor mAP de 64,16 %.
Un estudio de tres algoritmos de detección de objetos en imágenes [12] indicó que: (i) Single Shot Detector o SSD [20] obtiene un rendimiento bajo en comparación a Faster R-CNN al detectar objetos pequeños, presentando la desventaja que requiere de un set de datos grande, además de técnicas de data augmentation para el entrenamiento, lo cual es computacionalmente costoso y requiere de mayor tiempo de ejecución. (ii) Faster R-CNN [21] es más preciso, pero la complejidad del algoritmo requiere de un tiempo de entrenamiento alto, siendo significativamente más lento que YOLO y requiere analizar muchas veces cada imagen, a diferencia de YOLO. Finalmente, se indica que (iii) YOLO [22] presenta un modelo optimizado y más eficiente que SSD y Faster R-CNN. Versiones más recientes del algoritmo ofrecen una latencia baja, mejoras en el entrenamiento y tiempo de ejecución. Señalaron además que YOLO permite trabajar en tiempo real y obtener mejores precisiones, más aún si se usan técnicas de transfer learning [23].
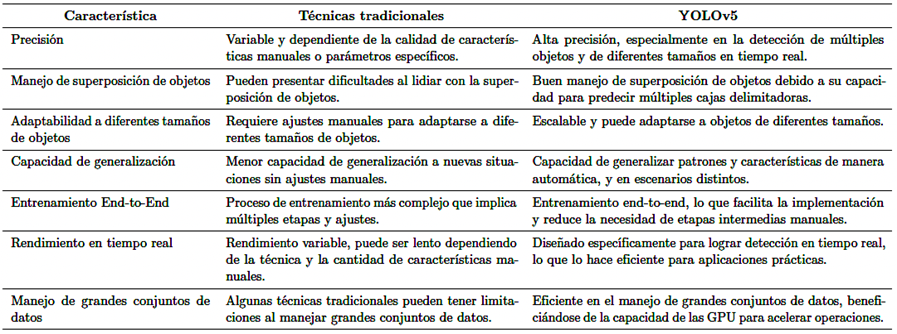
En relación con técnicas tradicionales de detección de objetos, algunas de las más utilizadas son el agrupamiento de K−means, máquinas de vectores soporte, sistemas difusos, histogramas de gradientes orientados (HOG), entre otras [24]; las cuales obtienen precisiones superiores al 80 %. Sin embargo, el objetivo de este artículo no es profundizar en técnicas tradicionales, sino brindar alternativas basadas en algoritmos modernos y específicos para la detección de objetos tales como YOLOv5. A pesar de ello, la Tabla 1 (elaborada sobre la base de [24-26], presenta una comparativa entre técnicas tradicionales y YOLOv5, destacando la superioridad de YOLOv5 en aspectos clave para la detección de objetos.
Finalmente, mencionar que, YOLO presenta diversas aplicaciones, no obstante, el análisis de la literatura demuestra que este tipo de técnicas no ha sido empleado en la identificación de puntos calientes en imágenes termográficas de subestaciones eléctricas, lo cual representa un aspecto innovador. Es por ello por lo que el presente estudio es continuación de una investigación publicada previamente por los autores en esta prestigiosa revista [27]. Se busca analizar el funcionamiento de cuatro versiones del algoritmo YOLOv5, divididas en 64 experimentos y aplicados a la detección de puntos calientes, para ello, se incluye el uso de un conjunto imágenes térmicas de subestaciones eléctricas capturadas por una empresa de distribución de energía en el norte peruano.
El documento inicia con una descripción del algoritmo y metodología utilizada; a continuación, se presentan los resultados, y finalmente, se plasman las conclusiones correspondientes.
Materiales y métodos
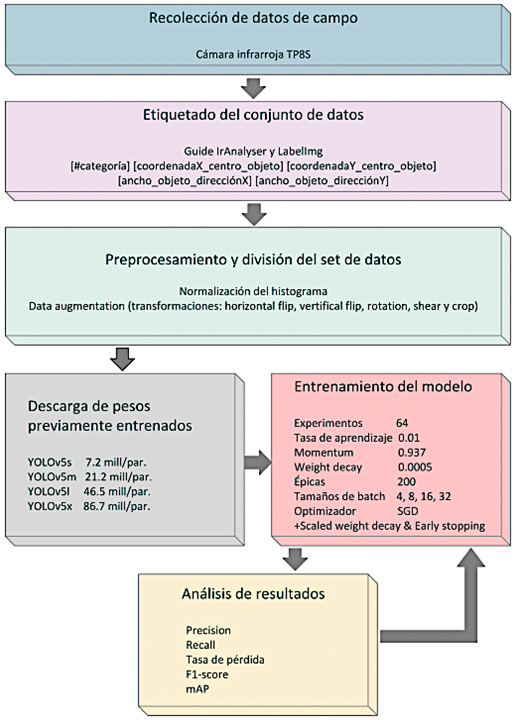
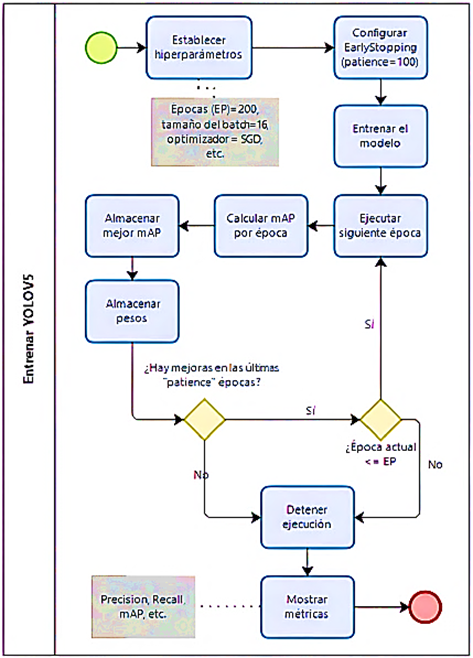
La investigación partió desde la captura de imágenes térmicas, el etiquetado de las mismas, la realización de un preprocesamiento y la correspondiente división del set de datos. Posteriormente, se descargaron los pesos previamente entrenados de las versiones YOLOv5s (small), YOLOv5m (medium), YOLOv5l (large) y YOLOv5x (extra-large). Finalmente, se realizaron 64 experimentos y se analizaron mediante diferentes métricas. El proceso de implementación completo se detalla en los siguientes puntos y se resume en la Figura 5.
Recolección de datos de campo
La metodología inició por la recolección de datos de campo mediante la captura de imágenes térmicas. Se utilizó la cámara infrarroja TP8S, que incluye un rango espectral de 8-14 μm, detector FPA (384x288 píxeles, 35 μm), campo de visión de 22°×16°/35 mm, enfoque electrónico automático, Sensibilidad térmica de 0.08 °C a 130 °C, y un zoom continuo de ×1 a ×10.
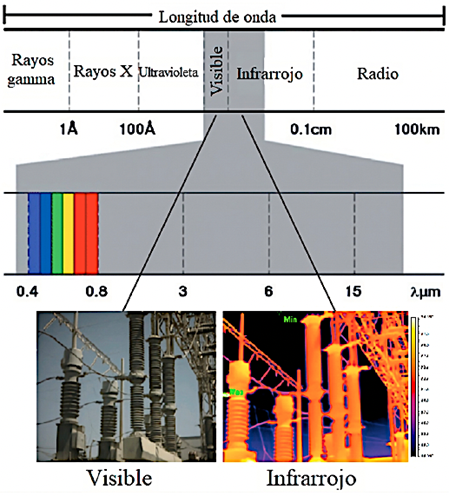
La fuente de datos empleada en este estudio consta de un conjunto de 815 imágenes termográficas, las cuales fueron adquiridas por expertos de una entidad dedicada a la distribución de energía eléctrica en la región septentrional de Perú. La Figura 6 exhibe un ejemplo del proceso de generación de una imagen termográfica de una subestación eléctrica a partir de la radiación en el espectro electromagnético.
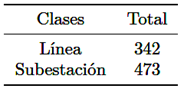
Estas imágenes presentan una resolución de 384 × 288 píxeles y fueron categorizadas en dos clases principales: líneas eléctricas, y subestaciones eléctricas (ver Tabla 2).
Etiquetado del conjunto de datos
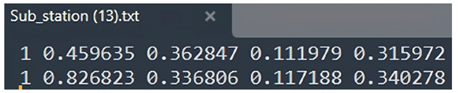
El etiquetado de este conjunto de datos fue realizado por un especialista en detección de puntos calientes en imágenes termográficas utilizando las herramientas Guide IrAnalyser y LabelImg. Cada punto caliente identificado se asoció con un archivo de texto correspondiente a la imagen subyacente, en el que se registraron la clase del objeto y sus coordenadas, siguiendo un formato específico: [número de categoría] [coordenada X del centro del objeto] [coordenada Y del centro del objeto] [ancho del objeto en dirección X] [ancho del objeto en dirección Y]. En la Figura 7 se ilustra el formato empleado para representar dos puntos calientes; este formato se repite en cada fila de acuerdo con el número de puntos calientes identificados y etiquetados.
Preprocesamiento y división del set de datos
Como parte del preprocesamiento de las imágenes, se realizó la normalización del histograma, con la finalidad de ajustar la distribución de intensidades de píxeles de cada imagen térmica para mejorar sus características.
Inicialmente, se contó con un total de 815 imágenes; de las cuales, 342 representaban imágenes de líneas eléctricas, y 473 subestaciones eléctricas, tal como se detalla en la Tabla 2. No obstante, luego de realizar el etiquetado de imágenes con puntos calientes, la cantidad de imágenes se redujo a 138 en total. De estas, 116 imágenes correspondían a subestaciones, y 22 a líneas eléctricas; por lo cual, se delimitó el presente estudio únicamente al análisis de subestaciones eléctricas.
A continuación, las imágenes se cargaron en la plataforma Roboflow y, a través de la técnica de división de tipo "hold-out, se generaron tres conjuntos de datos: (i) un conjunto de 81 imágenes destinado al entrenamiento, (ii) un conjunto de 23 imágenes para validación, y (iii) un conjunto de 12 imágenes para pruebas.
Además, con la finalidad de incrementar el número de imágenes y hacer el entrenamiento más eficaz, se aplicó data augmentation, mediante las transformaciones: horizontal flip, vertical flip, rotation, shear y crop, obteniéndose un set de datos con 278 imágenes: (i) 243 imágenes para entrenamiento, (ii) 23 para validación y (iii) 12 para pruebas.
Andrew Yan-Tak Ng, director del laboratorio de Inteligencia Artificial de la Universidad de Stanford, en un artículo publicado en Spectrum, revista editada por IEEE, señala lo siguiente: “En diversas industrias, contar con millones de datos para entrenar modelos de inteligencia artificial es complicado; por lo que, disponer de una cantidad pequeña de imágenes realmente buenas o de calidad, puede ser útil para construir sistemas de inspección de defectos. Sumado a esto, la precisión incrementa si se trabaja con los pesos de modelos previamente entrenados” [28].
Descarga de pesos previamente entrenados
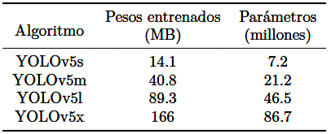
Buscando mejorar el desempeño de la solución, se procedió a descargar los pesos preentrenados de los cuatro algoritmos pertenecientes a YOLOv5. Estos pesos preentrenados se aplicaron a las capas convolucionales del detector, lo cual contribuyó significativamente a incrementar los porcentajes de precisión y reducir los tiempos de duración del proceso de entrenamiento. La Tabla 3 proporciona información detallada sobre los pesos de preentrenamiento asociados a cada uno de los algoritmos, así como la cantidad de parámetros contenidos en cada uno de ellos. Se destaca que YOLOv5s se presenta como el algoritmo de menor complejidad, mientras que YOLOv5x es el más sofisticado en términos de parámetros y complejidad.
Entrenamiento del modelo
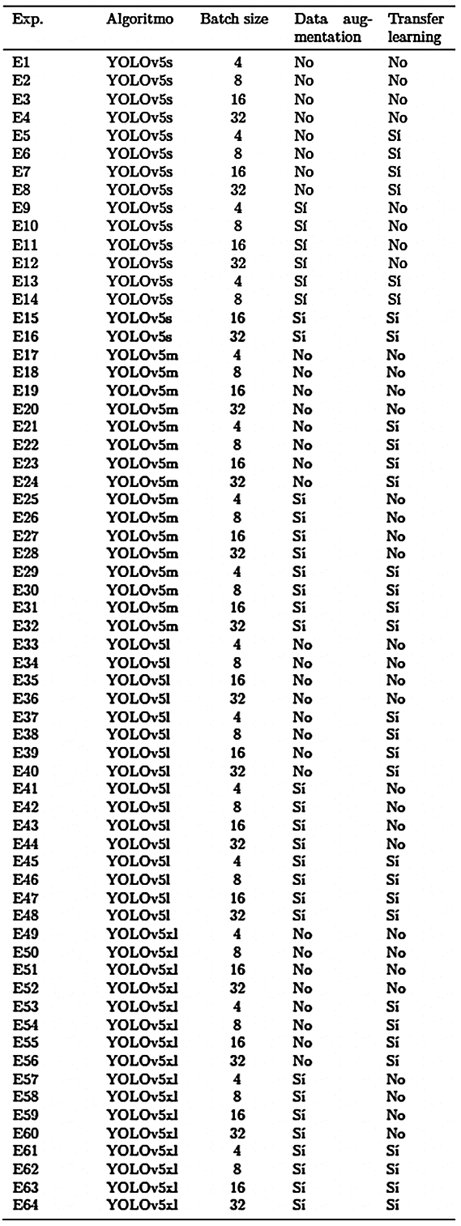
Se realizaron 64 experimentos según el detalle de la Tabla 4, los cuales fueron ejecutados en la plataforma Google Colaboratory (Colab), cuya versión gratuita ofrece un procesador Intel Xeon con 2.30 GHz, acelerador de GPU NVIDIA Tesla K80, memoria RAM de 13 GB, y espacio en disco de 40 GB.
Los hiperparámetros utilizados fueron una tasa de aprendizaje de 0.01, momentum de 0.937, weight decay de 0.0005, 200 épocas y 4 tamaños de batch, además del optimizador SGD.
Con la finalidad de evitar el overfitting (sobreajuste del modelo), se incluyó la regularización Scaled weight decay y la técnica de Early stopping, configurada con un patience de 100; es decir, el modelo detiene el entrenamiento si no observa mejoras en las últimas 100 épocas. Además, los pesos de las mejores épocas se almacenan en cada ejecución y se analizan los resultados de las curvas de mAP, Precision, Recall, Loss. El flujo seguido para el entrenamiento de YOLOv5 se plasma en la Figura 8.
Análisis de resultados
Luego del entrenamiento de cada modelo, se analizaron métricas como Precision (2), Recall (3), F1-score (4), tasa de pérdida, y mAP (5), el cual se calcula en función del Average Precision (6). Siendo TP el conjunto de verdaderos positivos, FP los falsos positivos, FN los falsos negativos y N el número de clases.
En diversas investigaciones se señala que métricas como F1-score y mAP (Mean Average Precision) son adecuadas al momento de comparar modelos [12], [29].

Resultados y discusión
A continuación, se presentan los resultados obtenidos por cada una de las cuatro variantes de YOLOv5.
YOLOv5s
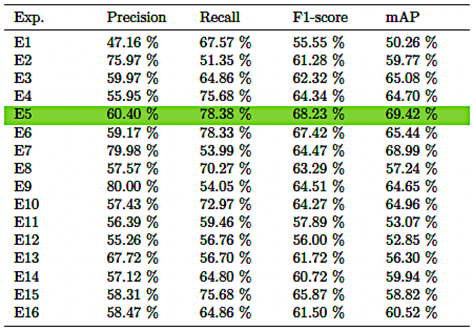
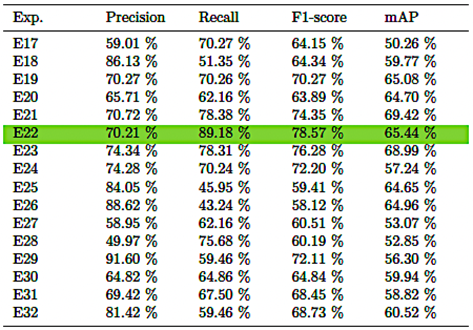
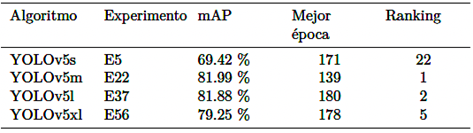
YOLOv5 small obtuvo mejores resultados (mAP = 69.42 % y F1-score = 68.23 %) al entrenar el modelo con el experimento 5, es decir, con un tamaño de batch de 8, 171 épocas, aplicando transfer learning y sin incorporar data augmentation (ver Tabla 5).
YOLOv5m
YOLOv5 medium obtiene resultados superiores a YOLOv5s (mAP = 81.99 % y F1-score = 78.57 %) al entrenar el modelo con el experimento 22, es decir, con un tamaño de batch de 16, 139 épocas, aplicando transfer learning y sin incorporar data augmentation (ver Tabla 6).
YOLOv5l
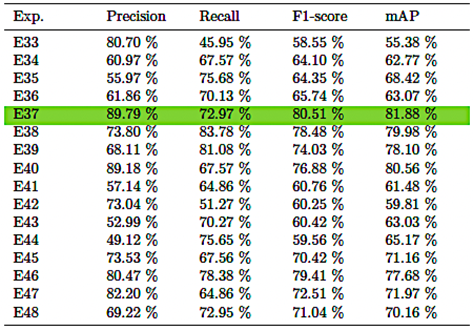
YOLOv5 large obtuvo resultados similares a YOLOv5m (mAP = 81.88 % y F1-score = 80.51 %) al entrenar el modelo con el experimento 37, es decir, con un tamaño de batch de 8, 180 épocas, aplicando transfer learning y sin incorporar data augmentation (ver Tabla 7).
YOLOv5xl
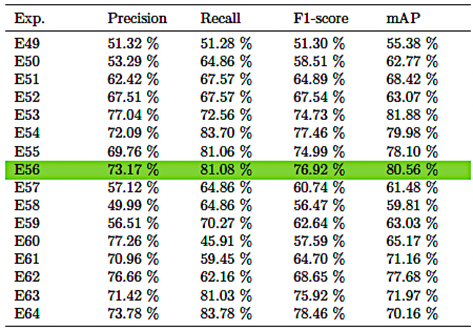
YOLOv5 extra-large obtuvo resultados ligeramente más bajos a YOLOv5m y YOLOv5l (mAP = 79.25 % y F1-score = 76.92 %) al entrenar el modelo con el experimento 56, es decir, con un tamaño de batch de 32, 178 épocas, aplicando transfer learning y sin incorporar augmentation (ver Tabla 8). Siendo el único caso en el que los mejores resultados se presentaron con un tamaño de batch relativamente superior a los otros tres algoritmos.
YOLOv5 - Mejores resultados
Se elaboró un ranking de los 64 experimentos, considerando a Mean Average Precision (mAP) como factor de ordenamiento (ver Tabla 9).
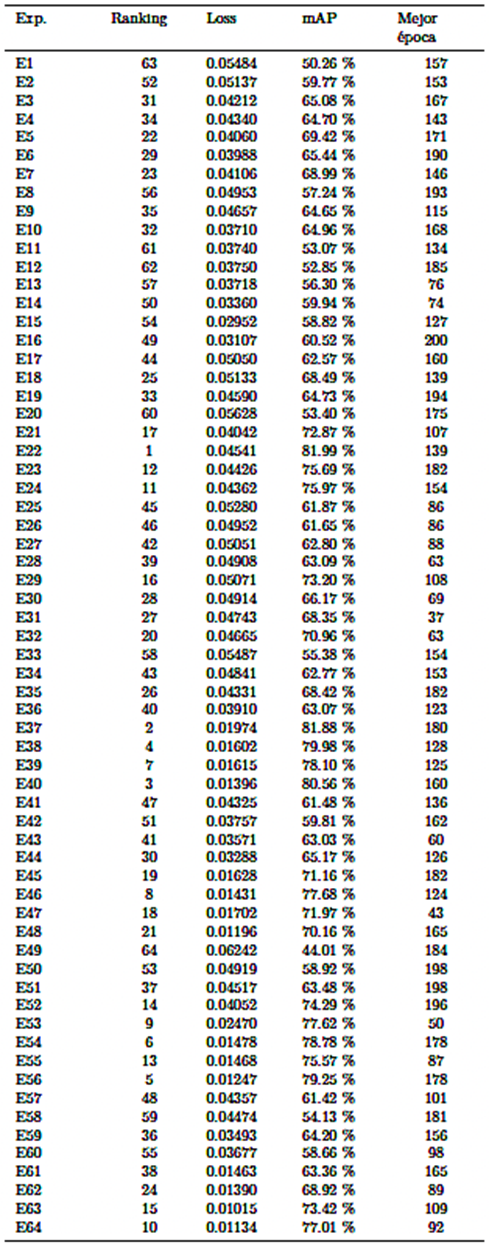
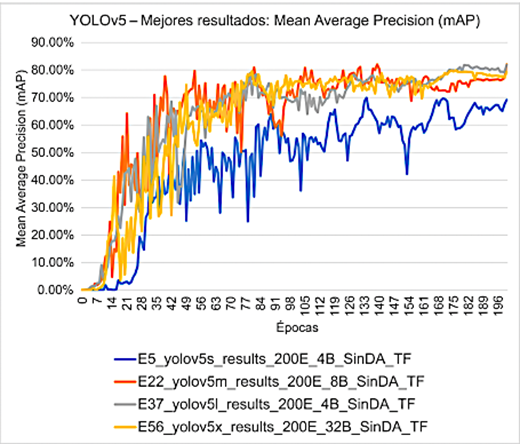
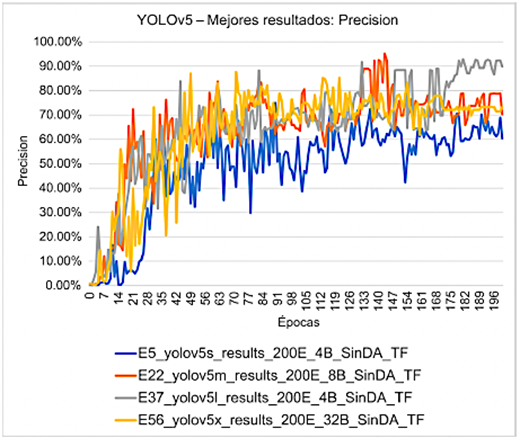
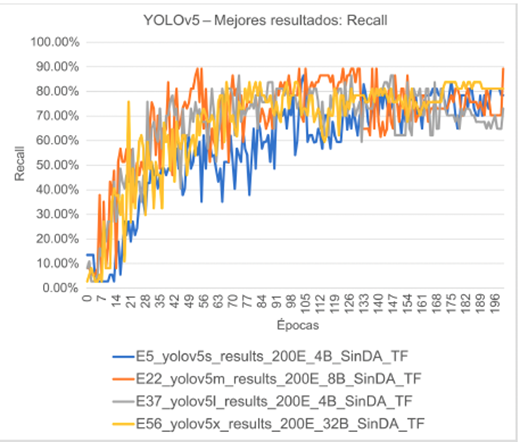
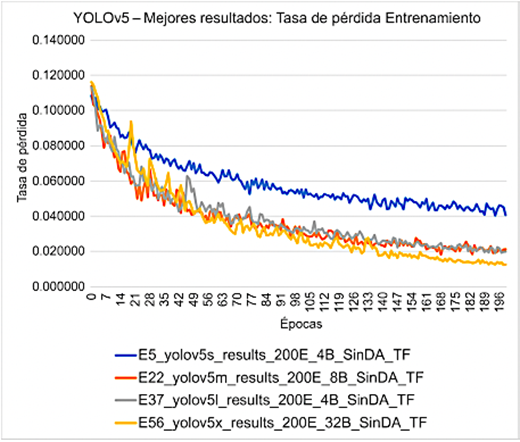
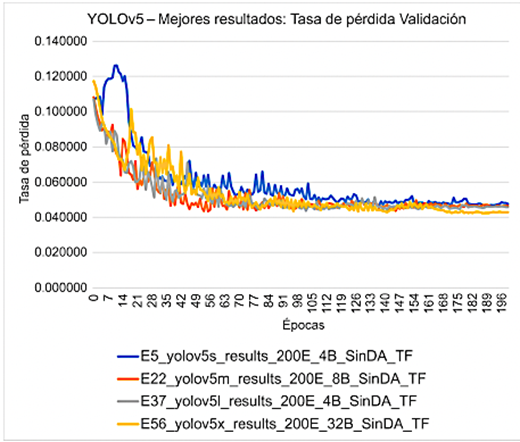
Los resultados más destacados de cada uno de los algoritmos se documentaron en la Tabla 10, y se presentan de manera gráfica en la Figura 9 (mAP), Figura 10 (precision), Figura 11 (recall), Figura 12 (tasa de pérdida durante el entrenamiento) y Figura 13 (tasa de pérdida durante la validación). En los cuatro escenarios evaluados, se observa que el desempeño más sobresaliente se logró mediante el empleo de transfer learning, prescindiendo del uso de data augmentation.
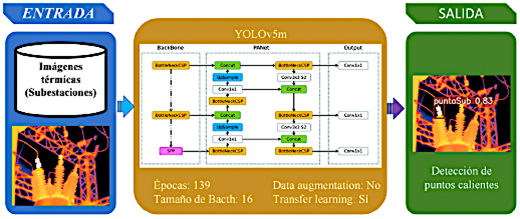
De los 64 experimentos llevados a cabo, el modelo más sobresaliente surgió al utilizar YOLOV5m y ser entrenado durante un total de 139 épocas, con un tamaño de batch de 8, sin recurrir al empleo de data augmentation, y haciendo uso de la técnica de transfer learning.
La descripción visual de la propuesta resultante de esta investigación se ilustra en la Figura 14. El primer paso consiste en introducir la base de datos de imágenes termográficas, a continuación, se procede con el entrenamiento del modelo utilizando el algoritmo YOLOv5m, y finalmente, se obtiene la detección de puntos calientes en las imágenes de subestaciones eléctricas.
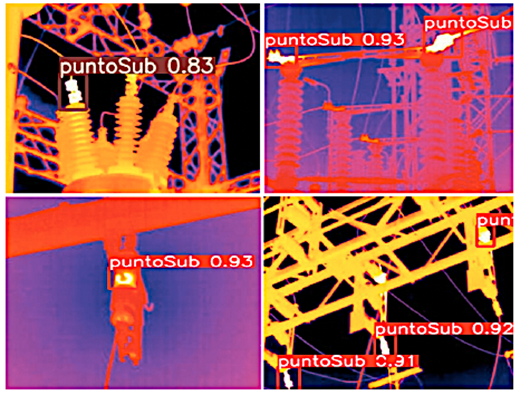
Algunas predicciones del modelo y sus porcentajes correspondientes se muestran en la Figura 15. Estos resultados se obtuvieron con imágenes del conjunto de datos de pruebas, las cuales no fueron incluidas en el entrenamiento ni en la validación del modelo de manera previa.
Conclusiones
El objetivo principal de esta investigación fue explorar nuevas perspectivas en contraposición a las técnicas convencionales de inteligencia artificial, poniendo un énfasis particular en el algoritmo de detección de objetos YOLOv5, debido a su notoria eficiencia en los procesos de entrenamiento.
Se analizaron 4 versiones del algoritmo YOLOv5, divididos en 64 experimentos y entrenados con un conjunto de imágenes térmicas de subestaciones eléctricas. Los resultados muestran una clara tendencia a mejorar las precisiones si se entrenan con un mayor número de épocas, o se consideran valores distintos a los utilizados en esta investigación, tales como optimizadores, hiperparámetros, entre otros.
La inclusión de técnicas de data augmentation ejerce un impacto adverso en la precisión de los modelos en todos los escenarios evaluados. Por otro lado, el uso de la estrategia de transfer learning, incluyendo la adquisición de pesos preentrenados para las capas convolucionales, se evidenció como un factor que contribuye a mejorar el rendimiento. En cuanto al tamaño del batch, se observó que los resultados óptimos se obtuvieron en el rango de valores entre 4 y 32. Esta elección se fundamenta en la limitación de tamaño inherente al conjunto de datos actual. Sin embargo, es importante señalar que este valor podría variar en investigaciones futuras que involucren conjuntos de datos más extensos de imágenes termográficas.
Las técnicas Scaled weight decay y Early stopping contribuyeron a evitar el Overfitting. Para ello, se consideró la detención temprana del entrenamiento, cuando no mostraba mejoraría en la ejecución de un número determinado de épocas.
Los resultados de la presente investigación sientan un precedente valioso para la futura profundización en la aplicación de algoritmos similares en el ámbito de la detección de puntos calientes en el sector eléctrico. Por lo que, como dirección para investigaciones futuras; se recomienda considerar la inclusión de modelos con otras variantes del algoritmo YOLOv5, como YOLOv5n6, YOLOv5s6, YOLOv5m6, YOLOv5l6, YOLOv5x6, o bien, evaluar alternativas como R-CNN y Faster R-CNN, entre otras. Basándonos en los resultados obtenidos en este estudio, se anticipa que estas exploraciones podrían conducir a rendimientos superiores.
Por último, se sugiere analizar la posibilidad de integrar el modelo desarrollado en una cámara termográfica, lo que permitiría la generación de alertas en tiempo real al momento de capturar imágenes en campo.

