











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Forma sugerida de citación:
Valladolid, J.; Calle, M. y Guiracocha, A. “Análisis de la eficiencia del freno regenerativo en un vehículo eléctrico mediante pruebas experimentales,” Ingenius, Revista de Ciencia y Tecnología, N.◦ 29, pp. 24-31, 2023. doi: https://doi.org/10.17163/ings.n29.2023.02
1. Introducción
Los vehículos eléctricos (VE) son muy atractivos y generan interés en la ciencia, academia y sistemas de transporte público y privado a escala global [1,2,3]. En este tipo de vehículos es esencial la búsqueda por mejorar la eficiencia del sistema, debido a que representan una importante alternativa de transporte en comparación con los vehículos convencionales con motores de combustión interna. Sin embargo, estos vehículos tienen autonomía de manejo limitada, y este factor continúa siendo el mayor obstáculo para su aceptación y uso masivo [1], [2], [4], [5].
A diferencia de los vehículos convencionales y, además de reducir la contaminación del aire, los VE pueden recuperar parte de la energía perdida en el proceso de frenado gracias al sistema de freno regenerativo, mejorando así su autonomía de manejo [6].
La geografía irregular de las vías expone a los vehículos a diferentes factores como la altitud de una carretera de montaña. En relación con el consumo de energía, estos factores requieren un mejor desempeño de las baterías en los vehículos eléctricos, especialmente en rutas de montaña. En este sentido, la pendiente de la carretera es un factor que no puede ser ignorado cuando se diseñan estrategias para optimizar el frenado regenerativo [7,8].
En un sistema de frenado regenerativo, la energía se transfiere a generadores bajo una estrategia de control integrado, que consiste en generar un estimado de la desaceleración por parte del conductor, y distribuir la fuerza de frenado requerida entre el sistema regenerativo y el frenado mecánico [9].
En la literatura, los autores consideran que la tasa de desaceleración y la masa del vehículo tienen efectos significativos en el umbral de frenado regenerativo a baja velocidad es efectivo en la ciudad, porque se requiere más acción en el sistema de frenado para tráfico pesado, incrementado así la potencia y autonomía del vehículo [4], [10]. Las estrategias de frenado regenerativo que toman en cuenta la pendiente de la vía son consideradas más eficientes por otros autores. Una mejora notable puede verse en la recuperación de energías [8].
Otros trabajos muestran, a través de simulaciones, que el menor consumo de energía ocurre con un sistema de frenado completo en serie debido al mejor uso del torque de frenado y, por tanto, se consume menos energía [11]. El consumo de energía potencial es menor durante un viaje en carretera que cuando se maneja en zonas urbanas, debido a que existe poca actuación del freno y, en consecuencia, se ve afectada la recuperación de energía en el vehículo eléctrico [12].
En este trabajo se realizan experimentos en rutas establecidas, para determinar la eficiencia del frenado regenerativo, su desempeño e influencia sobre la autonomía del VE. Se utilizaron mapas de comportamiento para analizar la influencia de factores tales como el tiempo de frenado, la velocidad inicial de frenado y el ángulo de la carretera en la recuperación de energía. Los porcentajes máximo y mínimo de recuperación de energía por rango serán estimados numéricamente.
El artículo está organizado de la siguiente manera: la Sección 2 presenta el soporte matemático del frenado regenerativo, describiendo con detalles subsistemas como el modelo dinámico; la Sección 3 presenta la eficiencia energética y el desempeño del frenado regenerativo. Finalmente, las conclusiones del estudio se presentan en la Sección 4.
2. Materiales y métodos
2.1.Estimación tradicional del estado de carga de la batería (SOC, state of charge)
Este método principalmente emplea la corriente de descarga de la batería como entrada, e integra la descarga de corriente durante un período para calcular el SOC [13]; la ecuación (1) se muestra a continuación.

Donde Cn corresponde a la capacidad nominal de la batería, i(t) corresponde a la corriente fluyendo dentro y fuera de la batería y t es el tiempo. Por otra parte, este otro método de cálculo requiere una variación a la Ecuación (1), multiplicando un factor de eficiencia coulómbica (µi) a la integral, que se representa entre la capacidad de descarga y la capacidad de la carga, representada por la ecuación (2).

2.2. Estado del SOC
La carga se expresa en la ecuación 3.

El SOC es el nivel de carga de una batería expresada como un porcentaje, de acuerdo con la ecuación (4).

2.3. Evaluación de la recuperación de la energía
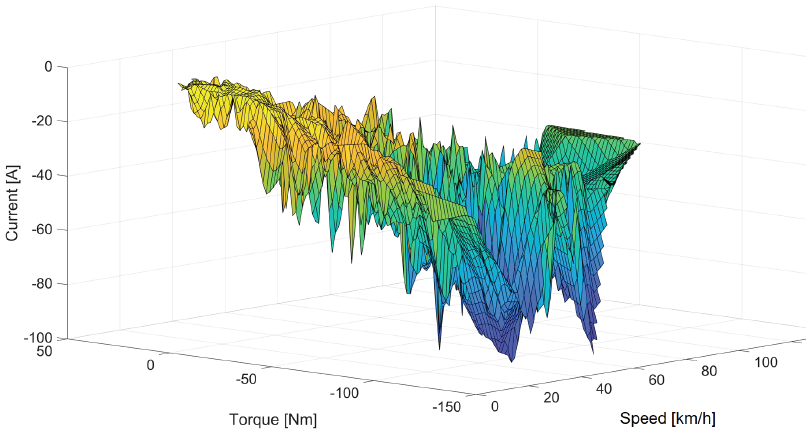
La evaluación de la recuperación de energía en el frenado regenerativo incluye principalmente la capacidad de recuperación de energía y la tasa de recuperación de energía, ambas durante el frenado [14]. Entonces, E m es la energía recuperada, dada por la ecuación (5).

Donde U b (t) es el voltaje en el controlador del motor durante la recuperación de energía de frenado, i b (t) es la corriente del controlador del motor durante la acción de frenado, y t es el tiempo de frenado del motor.
2.4. Medición de la recuperación de energía de frenado
La medición de la recuperación de la energía de frenado, nb, es la relación entre la energía E m y la energía total consumida. E b es la energía perdida calculada en función de la velocidad al inicio y final del frenado, como se muestra en la ecuación (6).

Donde m es la masa del vehículo, V0 es la velocidad inicial de frenado, V f es la velocidad final de frenado, y n b es la eficiencia dada en la ecuación (7).
La Ecuación (7) permite determinar los valores de eficiencia del frenado regenerativo, usando principalmente la velocidad del vehículo al iniciar el proceso de frenado.
3. Resultados y discusión
En esta sección se representan los resultados obtenidos en pruebas experimentales de conducción real, con Matlab y el software Electric Mobility Laboratory (Emolab) para determinar los parámetros que afectan la eficiencia del frenado regenerativo [15].
3.1. Variables involucradas en el proceso de recuperación de energía
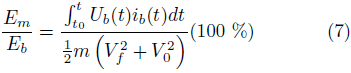
Emolab fue usado para obtener las variables del vehículo. Los registros de Emolab en tiempo real son la corriente de la batería, la velocidad del vehículo, el torque del motor y el SOC [14]. Matlab se utilizó para modelar esta data durante el proceso de frenado en la conducción real. Se generaron las superficies de desempeño, donde se observa la relación entre torque y velocidad. De esta manera, cuando se varían los valores de torque y velocidad, el sistema produce como salida un nuevo valor de carga de recuperación de energía que tiene influencia sobre la autonomía del vehículo.
La geografía de la ruta 1 presenta una mayor pendiente, lo cual se traduce en una mayor demanda de potencia del vehículo para superar las inclinaciones pronunciadas. La principal variable en la ruta 2 era un alto tráfico, lo que causa que se frene más frecuentemente. Mientras tanto, la ruta 3 presentó una combinación de estos dos factores, pendientes considerables y tráfico de las rutas 1 y 2.
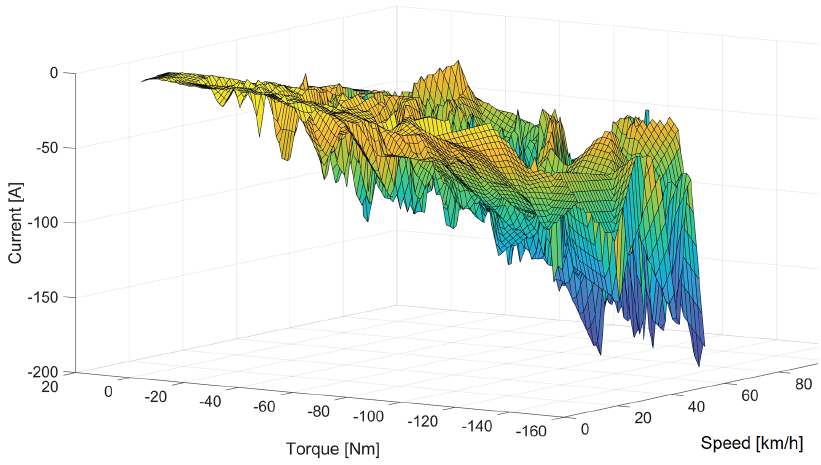
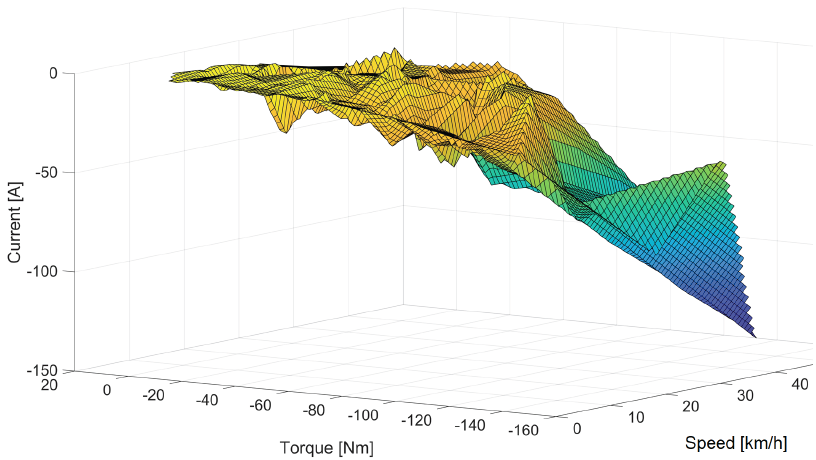
Las figuras 1, 2 y 3 muestran que variables tales como la velocidad y torque del motor tienen un papel clave en la recuperación de energía durante el proceso de frenado; esto se debe a que el sistema genera corriente por medio de un motor AC durante la acción de frenado, lo cual se representa con valores negativos. En este caso, la regeneración de energía en el vehículo se ve afectada por la velocidad y, por tanto, por el torque de frenado aplicado al vehículo.
La Figura 1 indica una mayor recuperación de energía, porque la geografía de la ruta uno tiene diferentes tipos de carreteras e inclinaciones. Estas características también permiten mayores velocidades del vehículo y, en consecuencia, mayores tiempos de aplicación del freno, lo cual resulta en mayores torques del motor y mayores corrientes.
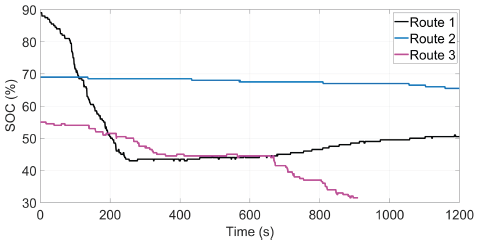
3.2. Comportamiento del SOC
Esta sección presenta el desempeño del SOC en los tres tipos de rutas, tomando en cuenta el tipo de carretera y el tiempo de conducción transcurrido.
En la figura 4 pueden observarse los diferentes desempeños del SOC para cada ruta y distancia. La ruta 1 tiene una mayor inclinación a lo largo de su trayectoria, y la batería tiende a descargarse a una tasa del 47%. La batería del vehículo se descargó de manera agresiva debido a la alta demanda de potencia para superar el trazado. Luego de un cierto punto, la geografía de esta ruta cambia a una pendiente únicamente descendente. Mientras desciende, el vehículo recupera 9% de su carga debido a los tiempos de frenado más largos y las velocidades más altas, de hasta de 70 km/h, como puede observarse en la Figura 1, y los torques del motor más elevados. La ruta 2 solo tiene un proceso de descarga. La figura 2 muestra bajas velocidades, en el rango 30-60 km/h. La cantidad de tráfico adicional resulta en un uso más extendido del freno. La tendencia de descarga de la batería es casi lineal durante la trayectoria completa, porque hay una variación de 5% de la carga desde su valor inicial. La ruta 3 presenta un proceso de descarga más abrupto en comparación con la ruta 2. El tipo de carretera es rural; tiene pendientes más pronunciadas, una demanda de potencia moderada por parte del vehículo, menos tráfico y velocidades en el rango 50-100 km/h, como se muestra en la Figura 3. En esta ruta se usa poco el freno. La Figura 4 muestra ciertos puntos a lo largo de esta ruta donde la descarga es significativa alcanzando 32% del nivel hasta su punto final.
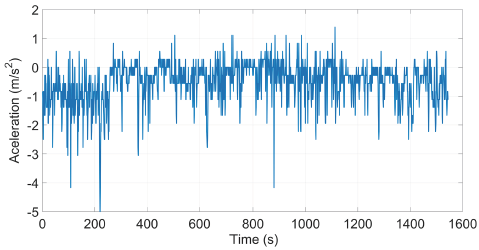
3.3. Desempeño de la desaceleración
En esta sección se explica el comportamiento de la desaceleración durante el frenado.
La Figura 5, elaborada con MATLAB, presenta una muestra de 1600 segundos de valores de desaceleración durante el proceso de frenado regenerativo. Los resultados tienden a variar con factores tales como la inclinación, el estilo de conducción y la geografía de la carretera, provocando una desaceleración heterogénea. Los valores observados de desaceleración favorecen la recuperación de energía, porque el estado de carga aumenta cuando se utiliza el freno y, por tanto, el vehículo recupera energía para continuar moviéndose hacia adelante.
3.4. Eficiencia del frenado regenerativo
La eficiencia del frenado regenerativo fue calculada con la Ecuación (7). Los valores más significativos son las velocidades inicial y final de frenado, la carga recuperada y el peso del vehículo.
La Figura 6 muestra la relación entre la velocidad inicial de frenado y la eficiencia para cada ruta. Estos valores se muestrean en puntos específicos para observar mejor el comportamiento de la eficiencia. Durante el proceso de manejo en las rutas 1, 2 y 3, los diferentes tipos de geografía de carretera, pendientes y velocidades iniciales de frenado tienen impacto en la variabilidad de las eficiencias obtenidas, como se muestra en la Figura 6. En la ruta 1, la eficiencia promedio en la muestra específica fue 23 %, y debido al tipo de geografía de la carretera el vehículo requiere usar más potencia, por lo que el pedal de freno no se emplea con alta frecuencia. En su valor pico, la eficiencia de frenado alcanza 76 %, lo cual se debe al tiempo de frenado más largo y a la velocidad final alcanzada.
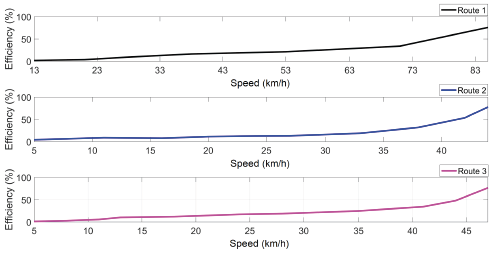
De acuerdo con la Figura 6, los valores varían en la ruta 2 porque presenta un alto flujo vehicular, bajas velocidades de conducción y alta ocupación del pedal de frenado; por tanto, hay una mayor eficiencia tiene a estabilizarse, resultando en mayor recuperación de energía, porque tiene valores óptimos de carga alcanzando un promedio de 24% y su eficiencia más alta alcanza un valor de 78%. La eficiencia de la ruta 3 muestra valores que varían con la geografía de la carretera, velocidades promedio de frenado y la cantidad de tráfico. La eficiencia promedio fue 22%, con un valor máximo de 77%. En las rutas 1 y 3, la eficiencia disminuye significativamente y no se estabiliza, resultando en valores bajos cercanos a cero.
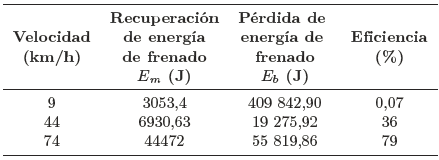
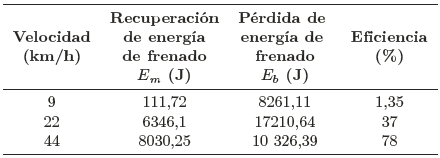
Se muestra que la eficiencia del frenado regenerativo en cada ruta depende de la energía del vehículo perdida y recuperada. La geografía de la carretera, la velocidad inicial de frenado y el tiempo de aplicación del freno, resumidas en la Tabla 1, son las variables principales que afectan los valores que se presentan en la Tabla 2 mejoran significativamente por el uso extendido del pedal de freno aun cuando sus valores de velocidad son menores debido al alto tráfico. Existe un menor consumo de energía porque no hay necesidad de alta demanda de potencia. La recuperación de energía y las altas eficiencias son favorecidas por la falta de cambios agresivos en la ruta.
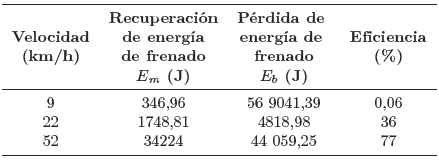
La Tabla 3 muestra que el vehículo tiene altas pérdidas de energía en comparación con la Tabla 2, debido a la geografía de la carretera, alta potencia en las pendientes y con el empleo moderado del pedal de freno,resultando en una baja recuperación de energía.
4. Conclusión
En este artículo se analizó el sistema de frenado regenerativo a través de experimentos de conducción real, donde se consideró la influencia de variables tales como corriente, torque y velocidad en la recuperación de energía del vehículo, para determinar la eficiencia y el desempeño del sistema de frenado regenerativo. La diferencia entre rutas es el tipo de geografía de la carretera, el tiempo de conducción del vehículo y la actuación del pedal de freno, por lo que en la ruta 1 fue posible observar una mayor recuperación de energía debido a los factores mencionados.
Con respecto al estado de carga (SOC) del vehículo, se observó que las diferentes potencias utilizadas en cada ruta y el tipo de geografía son variables significativas para una mayor pérdida de energía. Los resultados obtenidos indican que el uso del vehículo en la ruta 2 tiene una pérdida progresiva de energía, que en cierto momento tiende a estabilizarse debido al gran uso del freno por el alto flujo vehicular; por otra parte, en la ruta 1 se alcanzó una pequeña recuperación de energía debido al uso del freno en el descenso por pendientes pronunciadas.
Con respecto a la eficiencia del sistema de frenado regenerativo, los resultados demuestran que el tipo de geografía de la carretera, las velocidades iniciales de frenado, el uso del freno y la masa del vehículo son variables que influyen significativamente en la eficiencia de este sistema. Adicionalmente, la conducción en la ruta 2 es más eficiente que en las rutas 1 y 3, dado que tiene menores valores de pérdida de energía y altos valores de recuperación de energía.

