











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
1. Introducción
En la actualidad, el área del transporte automotor representa una de las fuentes principales de contaminación atmosférica; en efecto la descarga de contaminantes al ambiente tiene su origen en el acelerado crecimiento poblacional y desarrollo de diversos centros urbanos, por lo que el deterioro de la calidad del aire es por fuentes: móviles (vehículos), fijas (industria) y de área (actividades domésticas y servicios).
El área vehicular (vehículos a gasolina y diésel) es uno de los principales emisores de combustibles fósiles quemados al medio ambiente, debido a los gases contaminantes que se producen durante el funcionamiento del transporte automotor, siendo las principales emisiones: monóxido de carbono (CO), dióxido de carbono (CO2), hidrocarburos no combustionados (HC) y óxidos de nitrógeno (NOx), de tal manera que afectan a la salud pública y equilibrio de los diferentes ecosistemas.
Por lo antes expuesto, es necesario desarrollar nuevas técnicas especializadas y metodológicas para conseguir diagnósticos asertivos de fallos mecánicos, como también de emisiones de gases de escape; simultáneamente el uso de redes neuronales artificiales y matemática computacional, a causa de la complejidad de análisis e interpretación de los parámetros de operación del MEP, de tal manera que se determinen los fallos mecánicos y las emisiones que estos provocan, en tiempos cortos de diagnóstico con optimización de recursos. La contaminación atmosférica tiene efectos nocivos para la salud de todos, así lo demuestra la investigación llevada a cabo por Ballester [1], quien muestra que en Francia, Suiza y Austria el 6 % de la mortalidad y un número importante de nuevos casos de enfermedades respiratorias en estos países puede atribuirse a la contaminación atmosférica, siendo la mitad de este impacto debido a la contaminación emitida por los vehículos de motor.
La investigación de Restrepo et al. [2] estima alarmantes aportes de emisiones contaminantes que genera esmog y contribuye al efecto invernadero en la ciudad de Pereira. El estudio indica el aporte de contaminación de cada categoría vehicular según un software del modelo internacional de emisiones y una extrapolación, los resultados indican que vehículos particulares aportan más del 80 % de las emisiones de CO, el 60 % de CO2, 65 % de NOx, 40 de SOx y en las motos que aportan alrededor del 65 % de PM (material particulado).
La utilización de redes neuronales es considerada una técnica de gran contribución en el análisis de parámetros internos de los motores MEP, así lo demuestra Li et al. [3] mediante la aplicación de una red neuronal para la predicción de las emisiones de NOx, el estudio utiliza relaciones de intensidad de radicales de llama, junto con la temperatura de llama y las emisiones de NOx, para entrenar la red neuronal.
Cortina [4] propone un modelo de predicción de concentración de los contaminantes en la ciudad de Salamanca (México), los contaminantes más críticos son SO2 y PM10, el modelo hace uso de redes neuronales artificiales (RNA) combinadas con algoritmos de agrupamiento, el estudio usa determinadas variables meteorológicas como factores que influyen en la concentración de contaminantes.
Es pertinente reducir las emisiones de CO, HC y NOx de los motores de combustión interna de encendido por ignición, porque son causantes de diversos problemas ambientales, como la contaminación del aire y el calentamiento global, Martínez et al. [5] utilizaron redes neuronales artificiales (ANN) para predecir las emisiones de escape de un MEP de 1.6 l, con el objetivo de optimizar el MEP, al reducir las emisiones de CO, HC y NOx, cuyas entradas provinieron de seis parámetros operativos del motor y las salidas fueron tres emisiones de escape resultantes.
De igual forma, Fontes et al. [6] aplican redes neuronales mediante un perceptrón multicapa (MLP) con una capa oculta como un clasificador del impacto de la calidad del aire en la salud humana, utilizando solo datos de tráfico y meteorológicos como entradas. Estrategias paralelas y combinadas se pueden emplear para la determinación de concentraciones de emisiones, por ejemplo, un aprendizaje híbrido de la red neuronal artificial (ANN) con el algoritmo genético de clasificación no dominada – II (NSGAII) para mejorar la precisión y predecir las emisiones de escape de un motor a gasolina de encendido por ignición de 4 tiempos [7].
Se puede aplicar diferentes métodos para analizar y predecir emisiones, como el modelo de regresión lineal multivariante para analizar la relación entre contaminantes atmosféricos y factores meteorológicos. López y Pacheco [8] muestran que el benceno tiene como fuentes humo del tabaco, gasolineras, emisiones industriales y tubo de escape de automóviles en la zona urbana de la ciudad de Cuenca (Ecuador), genera un aumento en el número de casos clínicos tales como: asma (36,34 %), bronconeumonía (12,19 %), bronquiolitis (16,89 %), bronquitis (6,29 %), faringitis (12,41 %), neumonía (11,73 %) y rinitis (3,67 %), todo esto por el incremento n una unidad de su concentración; por otra parte, el PM10 presenta una relación positiva con la trombosis venosa ocasionando un incremento de 3,56 % de casos clínicos por cada unidad que incremente su concentración. Guadalupe [9] aplica una nueva metodología de modelación de emisiones contaminantes de fuentes móviles terrestres en Quito (Ecuador), el modelo internacional de emisiones vehiculares (IVE Model), el cual engloba una metodología tipo bottom – up, que reúne gran cantidad de información para conformar el inventario de emisiones.
Las estrategias de predicción de concentraciones de gases son variadas en la actualidad. León y Piña [10] presentan un modelo de predicción de emisiones (NOx, CO, CO2, HC y O2) aplicado en vehículos a gasolina, con la utilización de redes neuronales (ANN), las variables de entrada en la red neuronal son PME (presión media efectiva), rpm, carga y MAP, también el modelo predice la carga del motor, asimismo Contreras et al. [11] han propuesto un sistema de diagnóstico que puede detectar fallos mecánicos en motores de encendido por ignición de ciclo Otto, mediante redes neuronales (RNA), el sistema se sustenta en la utilización de las señales de los sensores MAP y CMP, y tiene un error de clasificación de 1.89e−11.
El sistema de predicción propuesto puede determinar emisiones contaminantes y los fallos mecánicos que provocan las determinadas emisiones, tales como: monóxido de carbono (CO) e hidrocarburos sin quemar (HC), el diagnóstico que realiza el sistema de predicción no lo realiza la ECU (Engine Control Unit). El sistema se basa en la presión del colector de admisión, la cual es registrada mediante la implementación física de un sensor MAP, por lo que el sistema tiene la facultad de reducir al mínimo el tiempo de diagnóstico; el sistema no utiliza variables de la calidad del aire de la ciudad, tampoco meteorológicas para el entrenamiento de la RNA, por lo que constituye un avance significativo para la predicción de emisiones de gases de escape y determinación de fallos mecánicos, resulta confiable y accesible poner en marcha este sistema en centros de servicio automotor y de revisión técnica vehicular (RTV).
2. Métodos y materiales
En la presente sección se desarrollan las temáticas principales que tienen que ver con la configuración experimental e instrumentación mínimamente invasiva, condiciones de adquisición de muestras, metodología para la adquisición de datos, obtención de matriz de análisis y reducción de atributos, selección de atributos para entrenamiento de la RNA y algoritmo de la red neuronal en Matlab para el diagnóstico y predicción de emisiones.
2.1. Configuración experimental e instrumentación mínimamente invasiva
El estudio tiene como consideración principal evitar el despiece de elementos y sistemas del motor de un vehículo para diagnosticar sus fallas mecánicas y predecir emisiones contaminantes, por lo que se mide la depresión del motor mediante la instalación de un sensor MAP en una toma de vacío del múltiple de admisión, ubicándolo después de la mariposa de aceleración, de tal manera que la conexión no afecta el funcionamiento del MEP.
En la Tabla 1, se resumen las características del motor a prueba y en la Tabla 2, se indica la instrumentación aplicada.

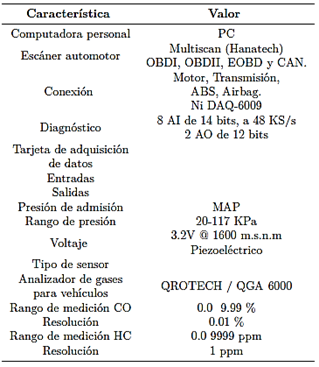
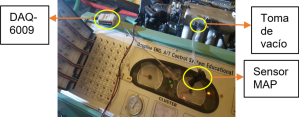
La identificación respectiva de cada cilindro del motor se realiza mediante el registro de la señal del sensor de posición del árbol de levas (CMP). En la Figura 1, se presenta la unidad experimental puesta a prueba Motor Hyundai Sonata 2.0 DOHC, un analizador de gases, una computadora personal (PC) y un escáner automotor. En la Figura 2, se muestra la conexión del sensor tipo MAP, la toma de vacío en el colector de admisión y la herramienta de adquisición de datos Ni DAQ-6009.

2.2. Condiciones de adquisición de muestras
Se realiza la instalación del sensor de presión de admisión ubicándolo en el colector de admisión del MEP, consecuentemente se adquiere muestras de emisiones de NOx, CO, CO2 y HC mediante el analizador de gases, la señal del sensor MAP con una tarjeta Ni DAQ-6009 en conjunto con el software LabVIEW se registra las muestras MAP.
Las muestras de presión y emisiones contaminantes se adquieren en ralentí aproximadamente a 850 rpm con un rango de temperatura del motor de entre 92 y 99 °C, carga del motor de 35 % y se utiliza el escáner automotor para corroborarlas. Sobre la base de un estudio pre-experimental realizado en la investigación se determinó que la señal del sensor MAP posee picos de mayor frecuencia, de tal manera que se realiza la toma de muestras a una velocidad de 10 KHz en un tiempo de 5 segundos para cada una de las señales, dicha velocidad supera el criterio de Nyquist (1.416 KHz) [11].
2.3. Metodología para la adquisición de datos
En la Figura 3 se presentan los elementos físicos necesarios para el correspondiente diagnóstico de fallas mecánicas y predicción de emisiones contaminantes.

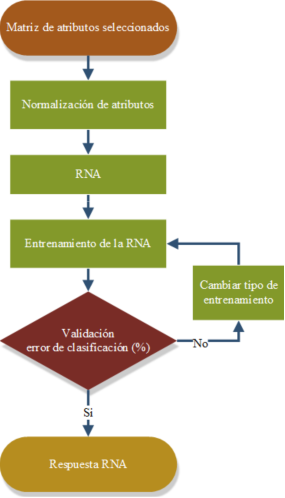
Para obtener los datos de las señales de los sensores MAP y CMP se aplica el proceso representado en el flujograma de la Figura 4. El proceso de obtención de datos se inicia con la revisión del motor en correcto funcionamiento o falla supervisada, posterior a ello se procede a inspeccionar la conexión de los sensores. Si la conexión es correcta, se graba la señal con el software Labview y se registra en un archivo de Excel, de lo contrario, se procede a verificar la conexión de los sensores [11]. Para registrar las señales se aplica el procedimiento antes descrito tanto para el caso de motor en buen funcionamiento como para el motor con falla supervisada, Figura 4 (a); 4 (b) [11]. El proceso de adquisición de datos se realiza 20 veces para cada una de las condiciones del motor.
En la Tabla 3 se indica el total de seis fallas que se generan en la unidad experimental MEP, cada una con su respectivo código de identificación; también se indica la condición del motor en óptimo funcionamiento.


2.4. Obtención de matriz de análisis y reducción de atributos
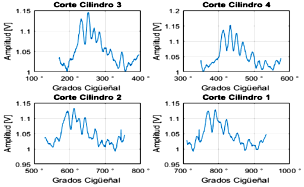
Se realiza un corte completo en la señal del sensor MAP que corresponde a un ciclo del motor (720°±180°), tomando en cuenta el reglaje de distribución de adelanto a la apertura de admisión (AAA) y retraso de cierre de admisión (RCA), correspondiente a cada uno de los cilindros [11]. Se desarrolla un ventaneo de la señal del sensor tipo MAP para cada cilindro, la cual se observa en la Figura 5.
Una vez realizada la toma de señales temporales se procede a desarrollar un algoritmo en el software Matlab para la correspondiente lectura y obtención de matriz general con 18 atributos, que son: media geométrica, máximo, mínimo, mediana, covarianza, varianza, desviación estándar, moda, factor de curtosis, coeficiente de asimetría, energía potencia, área bajo la curva, entropía, coeficiente de variación, rango, raíz media cuadrática y factor de cresta [11].
Para la selección y reducción del número de atributos se analiza la matriz general a través de 3 métodos estadísticos: ANOVA, matriz de correlación y Random Forest.
La aplicación del método estadístico ANOVA de un solo factor, permite determinar los mejores atributos que ingresan a la matriz general, mediante el análisis de los 18 atributos, tomando en consideración en el método el mayor valor de R2 puesto que los valores cercanos al 100 % indican que existe un correcto ajuste de los datos al modelo, es decir, se determina la variación entre los atributos. Además, en el método se consideran los valores de p próximos a 0 que determinan si los atributos son estadísticamente significativos [11].
Respecto a la matriz de correlación, se descartaron los atributos que contienen coeficientes próximos a -1 o 1, dado que con los mismos existe una relación fuerte entre las variables, ya sea negativa o positiva, respectivamente. En efecto, se seleccionaron los atributos con coeficientes próximos a cero, puesto que con estos atributos no existe una correlación fuerte entre las variables [11].
En cuanto al método de Randon Forest, permite obtener la estimación de importancia de atributos con uso de los métodos de Curvature test, Standard CART e Interaction test. Posterior a ello, se aplicó el análisis de Pareto para seleccionar los atributos de mayor prioridad, considerando solo el primer 95 % de la distribución acumulada [11].
2.5. Selección de atributos para entrenamiento de la RNA
Para seleccionar los atributos que serán considerados en la entrada de la red neuronal se realizó un análisis de coincidencia de la matriz general de la cual se seleccionaron los atributos que más se repiten entre los resultados de cada método estadístico aplicado [11]. Los atributos que más se repiten se muestran en la Tabla 4.

2.6. Algoritmo de la red neuronal en Matlab para el diagnóstico y predicción de emisiones
Mediante el uso de la plataforma de RNA del software Matlab se realizaron diferentes configuraciones para obtener dos redes neuronales para la emisión contaminante CO y HC, respectivamente, con un mínimo error de clasificación.
En la Figura 6 se presenta el flujograma para la creación de las respectivas redes neuronales artificiales de CO y HC.
El algoritmo inicia con la lectura de la matriz de entrada y respuesta respectiva para la RNA. Luego se normaliza el vector de entrada y la respuesta con el valor máximo de cada matriz con el objetivo de optimizar la creación de la RNA. Una vez normalizada la matriz de atributos se procedió a la creación de la RNA [11].
Las redes neuronales se establecen de acuerdo con las características indicadas en la Tabla 5.
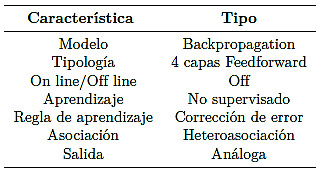
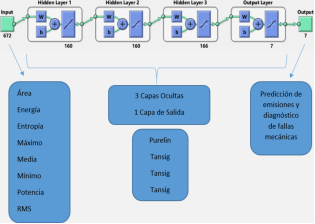
En la Figura 7 se observan los parámetros de la creación de la RNA de tipo feed-forward backpropagation para la predicción de la emisión contaminante CO.
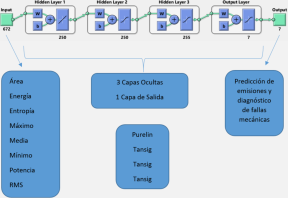
En la Figura 8 se observan los parámetros de la creación de la RNA de tipo feed-forward backpropagation para la predicción de la emisión contaminante HC.
Una vez creadas las redes, se procedió a su entrenamiento y para ello se consideraron los parámetros como: tipo de algoritmo, número de épocas y el error máximo.
A continuación, se presentan los pasos y fórmulas a utilizar para entrenar la red neuronal:
1. Los pesos de la red neural se inicializan con valores pequeños aleatorios.
2. Se ingresa un patrón de entrada a la red con las diferentes condiciones del motor Xp (Xp1, Xp2, . . . Xpn) y se especifica la salida deseada de la red como Ym que sería el valor de emisiones.
3. Se calcula la salida actual de la red.
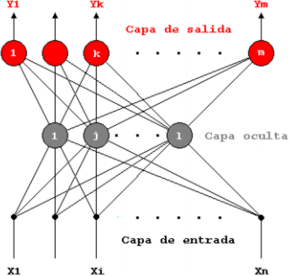
La arquitectura de la red se muestra en la Figura 9, donde el subíndice p indica el p-ésimo vector de entrenamiento, j el número de neurona oculta y el índice i varía desde 1 hasta el número de entradas de la capa de entrada.
Con las redes previamente entrenadas se verificó el error de clasificación, respectivamente, en la red de CO y red HC, si el error es mayor al 5%, se procede a cambiar los parámetros para disminuir el error de clasificación.
La red neuronal de CO utiliza la función de entrenamiento trainscg (Scaled Conjugate Gradient) para el sistema de predicción de emisiones y diagnóstico de fallas mecánicas, el cual presentó un error de 5.4061e−9.
Así mismo la red neuronal de la emisión HC utiliza la función de entrenamiento trainscg (Scaled Conjugate Gradient) para la predicción de emisiones y diagnóstico de fallas mecánicas, la cual presentó un error de 9.7587e−5.
En la Figura 10 y Figura 11 se presentan los resultados del coeficiente de correlación de Pearson R de la red neuronal de CO y HC, respectivamente, la cual es facilitada por el código de entrenamiento red.trainFcn=’trainscg’ del software Matlab.


Las líneas indican los valores esperados y los círculos negros representan los valores pronosticados por la RNA. La predicción determinada por la red neuronal es eficiente y se corrobora con un buen desempeño, dado que se obtiene un índice global de 1 en entrenamiento, validación y prueba lo que indica una relación lineal fuerte positiva entre las condiciones reales del MEP y los resultados proporcionados por la red neuronal [11].
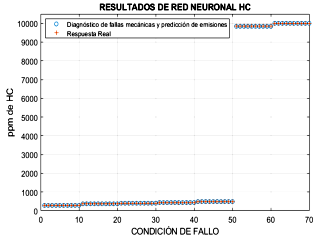
En las Figuras 12 y 13 se muestra la comparación entre la respuesta de la red neuronal con el resultado esperado, respectivamente de la red CO y red HC; se observan las siete condiciones mecánicas reales del motor identificadas por la red neuronal.
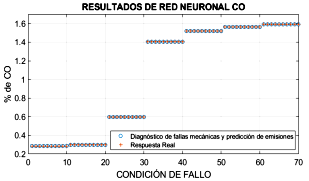
Figura 12. Red neuronal CO con porcentaje de error de 5.4061e−9, con función de entrenamiento “trainscg”.
3. Resultados y discusión
A fin de comparar el correcto funcionamiento del sistema de predicción de emisiones y diagnóstico de fallas mecánicas se procede a realizar varias pruebas bajo diversas condiciones de funcionamiento.
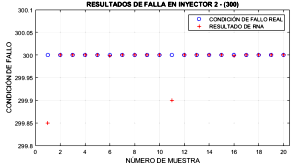
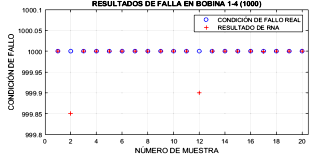
En este apartado se presentan dos condiciones de falla en específico: el inyector 2 (300) y el fallo en bobina 1-4 (1000).
En la Figura 14 se muestran los resultados de los valores obtenidos por la red neuronal CO para los estados de funcionamiento cuando el inyector 2 se encuentra con falla.
En la Figura 15 se observan los resultados de los valores obtenidos por la RNA de HC para condiciones de funcionamiento cuando la bobina 1-4 se encuentra con falla.
Obtenidos los resultados de las condiciones funcionales del motor de encendido provocado, se puede resaltar que la diferencia entre las respuestas tanto de condición real y respuesta de red neuronal de CO y HC tienen un valor próximo a cero. Por lo tanto, la aplicación del sistema de diagnóstico de fallas mecánicas y predicción de emisiones contaminantes es capaz de detectar la condición funcional de falla mecánica y predicción de emisión contaminante.
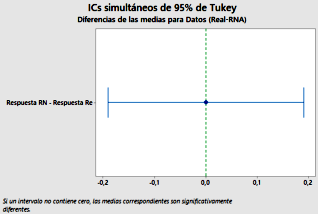
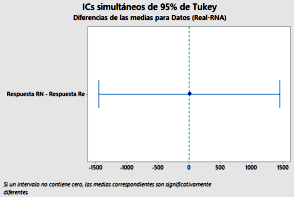
En efecto en la Figura 16 se observa que al agrupar los datos de condición real del motor y respuesta obtenida de la RNA de CO y en la Figura 17 la del HC, mediante el método estadístico de Tukey con un índice de confianza del 95 %, se determina que las medias son equivalentes y no existe una diferencia estadísticamente significativa, ya que las medias de cada una de las respuestas coinciden en un valor próximo a cero.
Además, las Figuras 18 y 19 de intervalos de la RNA CO y HC, respectivamente, indican que no existe diferencia entre los promedios de las pruebas en las diferentes condiciones funcionales del MEP.

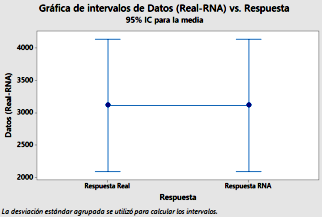
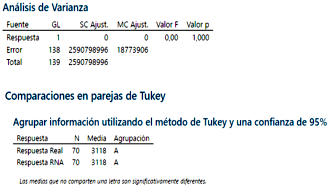
Asi mismo, en las Figuras 20 y 21 se corrobora que existe una relación entre la respuesta real y de la red neuronal ya que comparten la misma letra de agrupación (A) y el valor p (p-valúe) es igual a 1. Dando como resultado un valor de confiabilidad aproximadamente del 100,00 %, siendo este valor aceptable para temas de diagnóstico de fallas mecánicas y predicción de emisiones contaminantes de motores de combustión interna de encendido provocado.

4. Conclusiones
Los modelos de redes neuronales para el diagnóstico y predicción de emisiones contaminantes tanto de CO y HC desarrollados posee un error de clasificación de 5.4061e−9 y 9.7587e−5, respectivamente.
La función de entrenamiento trainscg, permite la identificación precisa de los diferentes tipos de condiciones mecánicas del MEP y predicción de emisiones, por lo que constituye una alternativa viable para ser integrada en un sistema de diagnóstico como escáner automotor o analizador de gases de vehículos a gasolina, debido a la rapidez computacional que ofrecen las redes neuronales artificiales.
Mediante el desarrollo del análisis de varianza de un solo factor, se obtuvo un valor de p (p-valúe=1,00) demostrando que la respuesta real de clasificación de fallas mecánicas y predicción de emisiones es equivalente al resultado obtenido mediante las redes neuronales desarrolladas, de manera que con este valor se demuestra que no existe una diferencia estadísticamente significativa.
En este trabajo se muestra que la aplicación de redes neuronales (feed-forward backpropagation) es válida para la detección de condiciones de fallas mecánicas como también para la predicción de emisiones contaminantes de vehículos a gasolina, además, la técnica de diagnóstico aplicada presenta la ventaja de evitar el desensamble de elementos y sistemas del motor con una técnica mínimamente invasiva fiable y de gran precisión.
Los resultados muestran que las redes neuronales (feed-forward backpropagation) con 160 o 250 neuronas ocultas y entrenando con la función trainscg (Scaled Conjugate Gradient), puede lograrse un error promedio 4.87962e−5, lo que demuestra que las emisiones de vehículos a gasolina se pueden predecir con alta precisión.

