











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkForma sugerida de citación:
Lucero, J.; Ñauta, J.; Carpio, M. (2017). «Diseño e implementación de un sistema de control de voltaje y frecuencia de un sistema eléctrico de potencia a escala para la Universidad Politécnica Salesiana, sede Cuenca». Ingenius. N°. 17, (Enero-Junio). pp. 60-66. ISSN: 1390-650X.
1. Introducción
En los sistemas de generación eléctrica es importante mantener los valores de frecuencia y voltaje dentro de límites aceptables basados en una norma para garantizar una buena calidad de energía generada y así el correcto funcionamiento de los elementos eléctricos o electrónicos que se conecten a la red eléctrica; además, se debe poder controlar las variaciones que puede sufrir la frecuencia ante las variaciones de potencia activa o las de voltaje ante las variaciones de potencia reactiva, para lo cual existen los AVR (reguladores de voltaje automático), que son más de tipo comercial, por lo cual se propone el diseño e implementación de un controlador PID (proporcional, integral, derivativo), el cual tiene la función de mantener en un rendimiento deseado la planta (equipo o máquina que realiza una operación especifica) que controla ante posibles perturbaciones. [1, 2]
Un sistema de control [3] se puede diseñar por diferentes métodos para los cuales son de mucha utilidad programas de computadora como Matlab para la identificación, sintonización y simulación de los sistemas de control y LabVIEW para realizar las acciones de control en tiempo real y la interacción con el usuario por medio de una interfaz gráfica y con ello manipular las variables de interés como voltaje y frecuencia.
1.1. Sistema eléctrico de potencia a escala
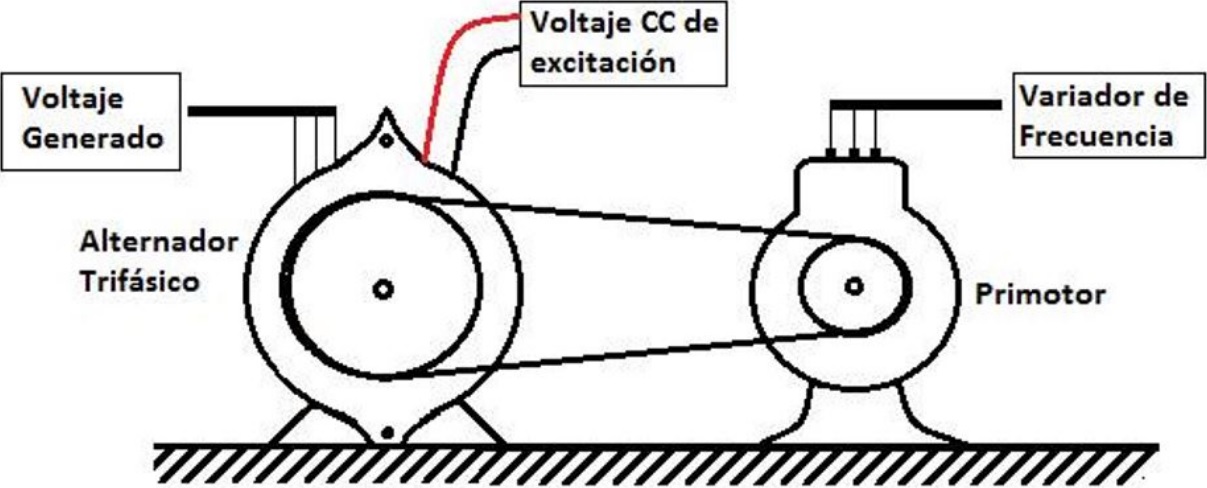
La etapa de generación eléctrica que forma parte de un sistema eléctrico de potencia a escala se encuentra conformada por un primotor acoplado a un generador síncrono (12 polos) mediante sus ejes por una banda, las variables a controlar son la frecuencia y voltaje generado.
El primotor dentro del sistema a escala simula la acción que provocaría un caudal que en la vida real impulsaría a las paletas presentes en una turbina, la cual es representada por el generador, esto se lo puede observar en la Figura 1. Además, el sistema a escala cuenta con el sistema de transmisión y subtransmisión.
Las funciones de transferencia de los sistemas fueron obtenidas mediante Matlab, de la misma manera los valores de las constantes del controlador PID. [3]
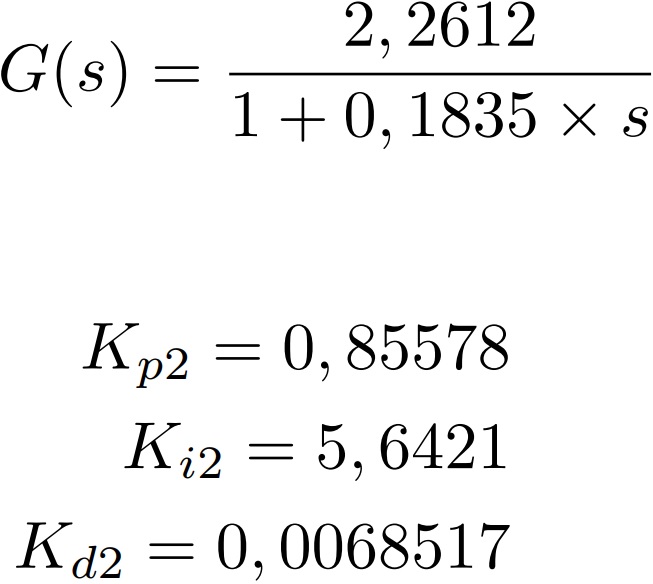
Los datos con que se obtiene la función de transferencia aparecen mediante la medición de las revoluciones por minuto que se obtiene al aplicar voltaje a un variador de frecuencia que controla la velocidad de giro del primotor el cual mueve al generador, manteniendo la tensión de excitación constante. Realizando una variación de tipo escalón al voltaje aplicado se obtiene datos mediante LabView de las revoluciones por minuto los cuales son procesados mediante el comando «ident» en Matlab, obteniendo la siguiente ecuación:

Obtenida la función de transferencia mediante la herramienta de Matlab (Sisotools) se obtendrán las constantes del controlador (KP, KI, KD), dentro de esta opción permite hacer rápido o lento, robusto o no robusto al control según las consideraciones de diseño, en este caso se obtuvieron los siguientes valores de las constantes de control para la primera función de transferencia.

La función de transferencia se obtiene mediante la medición del voltaje generado y la tensión de excitación variando esta y manteniendo constante la frecuencia. Mediante el método de los puntos se obtiene la siguiente función de transferencia.
2. Simulación del controlador PID
A continuación, se procede a realizar la simulación de los controladores del sistema de frecuencia y voltaje por separado para verificar el funcionamiento y los tiempos de respuesta.
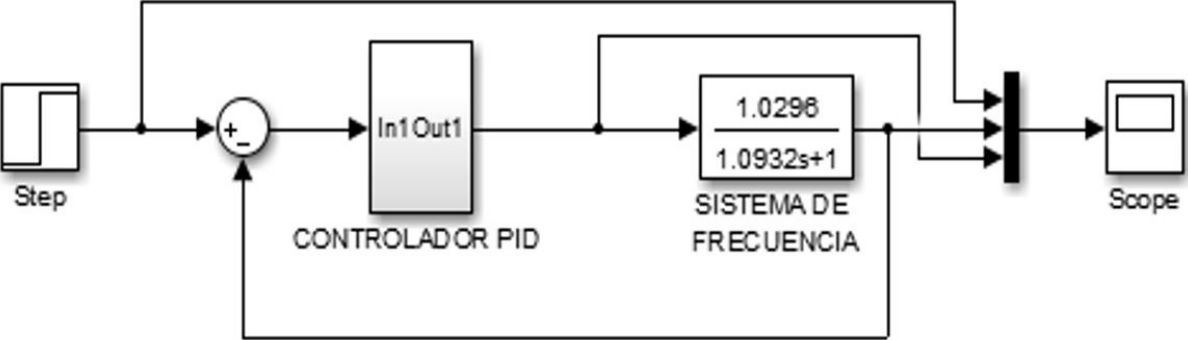
En la Figura 2 se presenta la simulación del controlador PID aplicado a la planta de frecuencia.
En la Figura 3 se muestra como actúa el controlador PID (señal morada) y la respuesta de la planta ya controlada (señal verde).
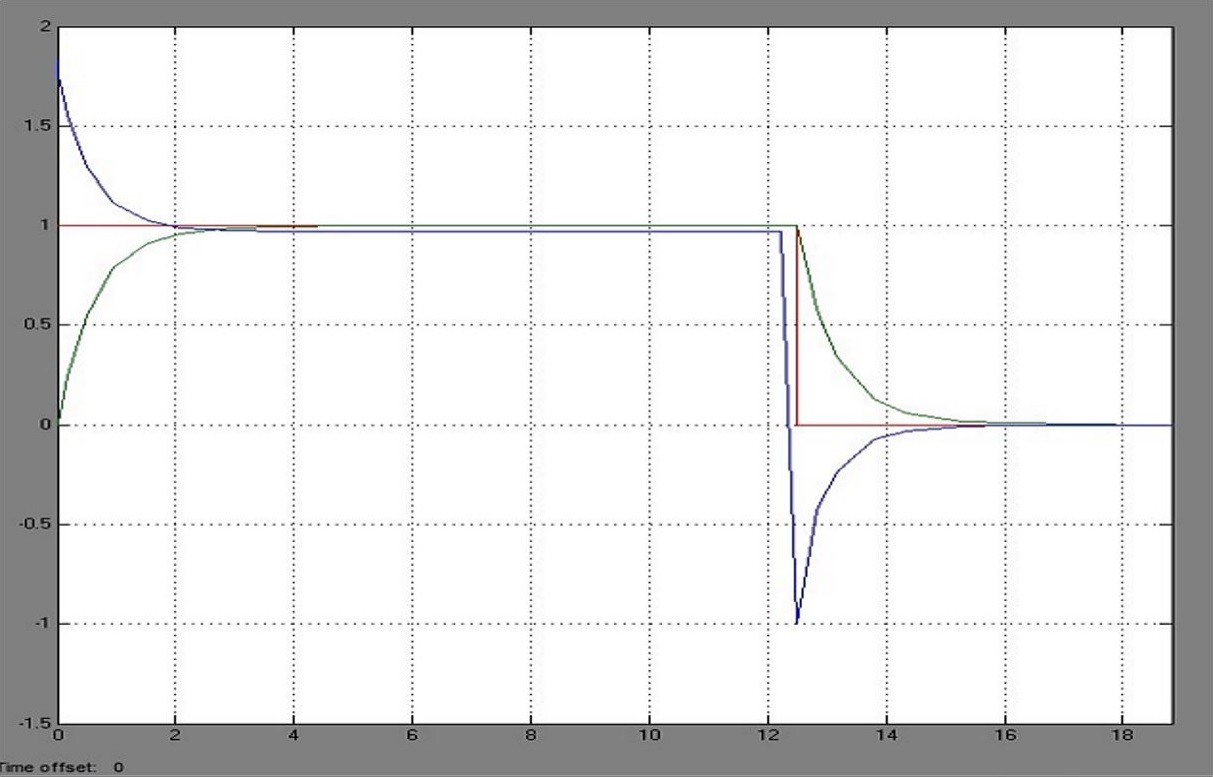
Como se puede observar en la Figura 3 el tiempo de estabilización de la planta es aproximadamente de 2,5 segundos, este lapso de respuesta se puede considerar aceptable ya que el criterio en que se basa el desarrollo del controlador prioriza la precisión.
En la Figura 4 se presenta la simulación del controlador PID aplicado al sistema de voltaje.
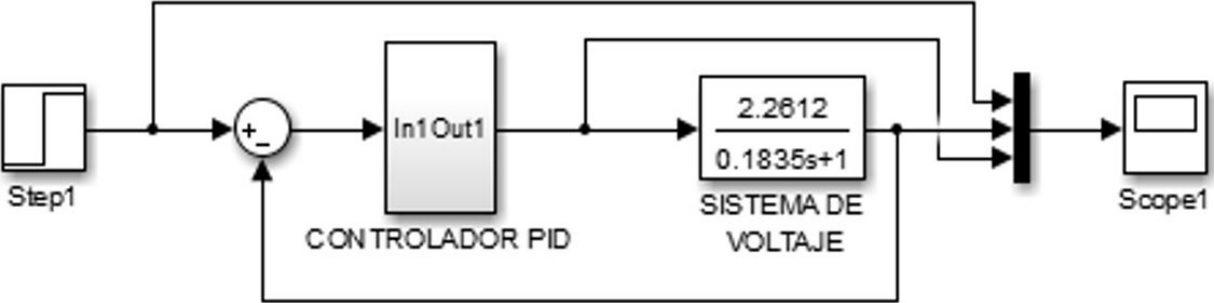
En la Figura 5 se puede observar la respuesta del controlador (señal morada) y la repuesta de la planta controlada (señal verde).
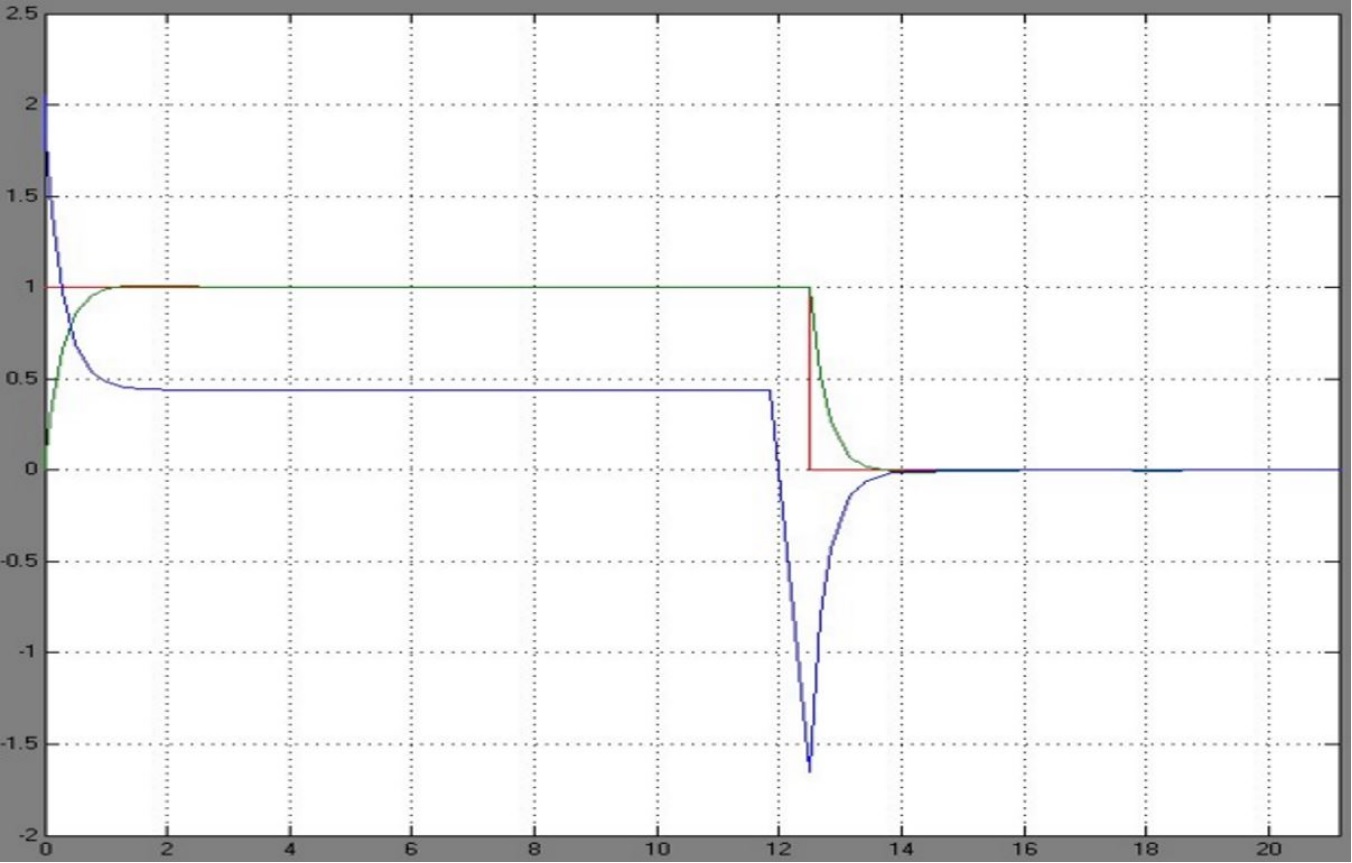
Como se puede apreciar en la Figura 5 el tiempo de estabilización de la planta del sistema de voltaje es aproximadamente de 1,3 segundos.
Se debe tomar en cuenta que en la vida real los tiempos de respuesta pueden variar, debido a que los dos controladores se van a relacionar.
3. Implementación
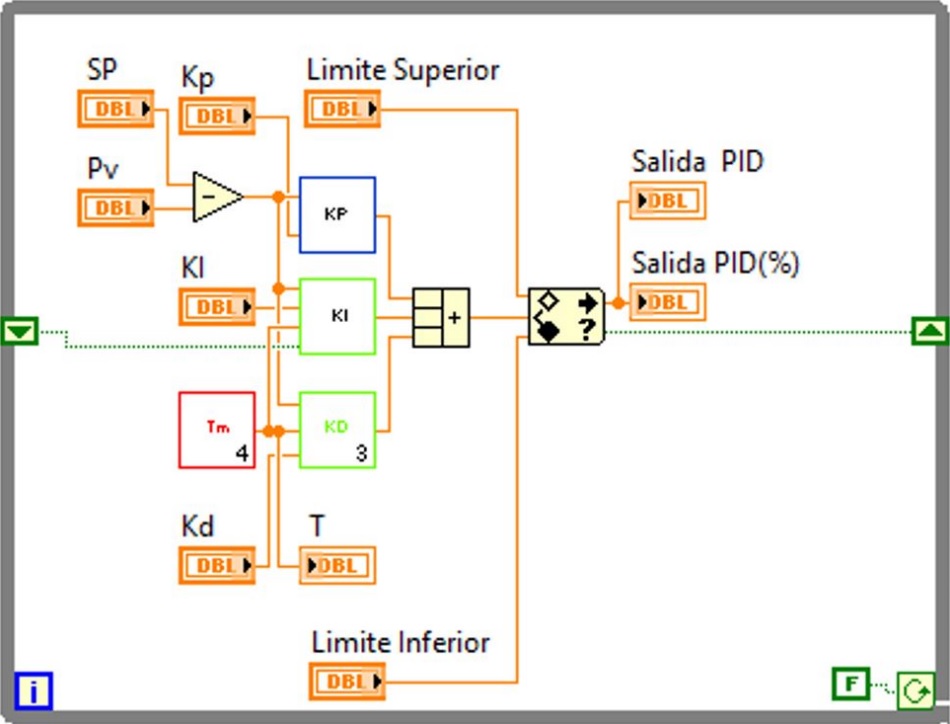
La implementación del sistema de control se logra mediante el uso de LabVIEW, el controlador PID se lo diseña por bloques, es decir, la acción proporcional, integral y derivativa se lo realiza por separado y se los coloca en paralelo para obtener la respuesta deseada tal como se puede observar en la Figura 6. Para la acción integral se basa en la integración trapezoidal, y para la acción derivativa se utiliza el método de diferencias finitas (diferencias hacia adelante).
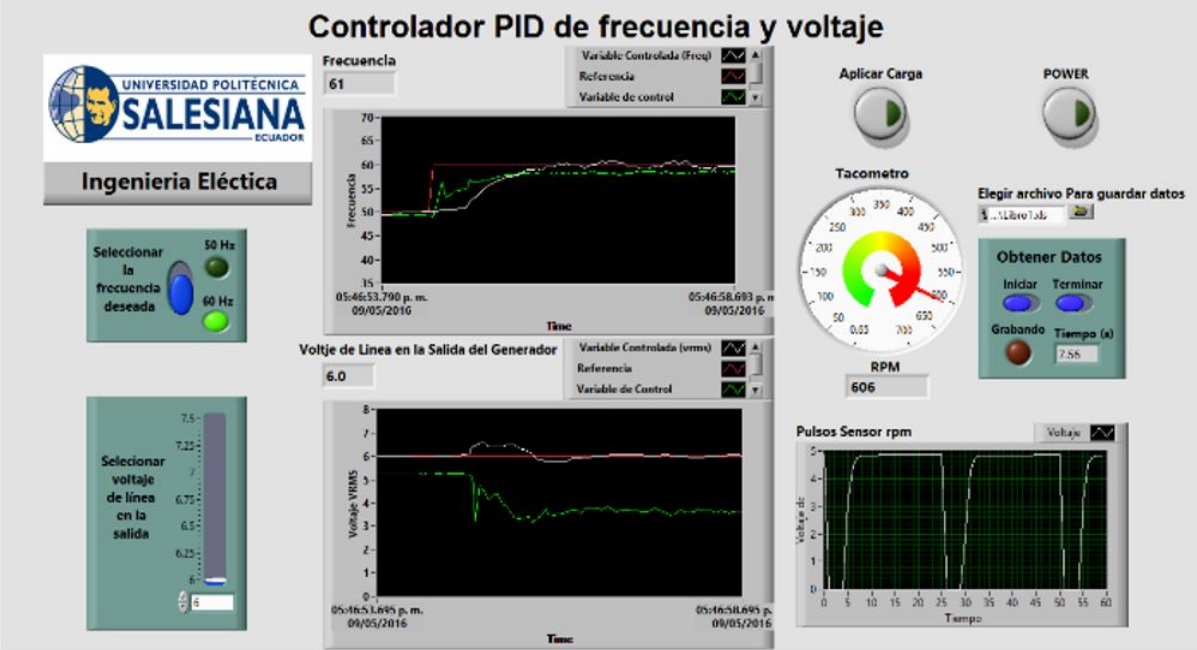
demás de implementar el control, se realiza una interfaz gráfica para una interacción sencilla, tal como se muestra en la Figura 7.
4. Análisis de resultados
En el presente bloque se indica las diferentes pruebas realizadas en LabVIEW con sus respectivos resultados analizados mediante Matlab.
4.1. Comparación del sistema con y sin controlador
Comparación del sistema con y sin controlador ante la conexión del generador al sistema de transmisión y subtransmisión
En este apartado se muestra de manera gráfica cómo es la reacción del sistema sin controlador y con controlador, para apreciar la funcionalidad del controlador implementado en el sistema eléctrico de potencia.
En la Figura 8 que no se muestra la gráfica de la frecuencia porque la frecuencia no se afecta cuando se conecta el sistema de transmisión y subtransmisión, lo contrario sucede con el voltaje debido a que el voltaje de salida en el sistema sin controlador tiene una caída de 352 milivoltios y que se trasforman en una caída de 9,85 voltios en la etapa de amplificación, ya que el transformador elevador tiene una relación de 1:28.
Además, se puede observar que durante el régimen permanente existen unas variaciones, debidas a que la adquisición de las señales de los sensores se realiza cada 60 milisegundos por motivos de procesamiento en tiempo real de las mismas.
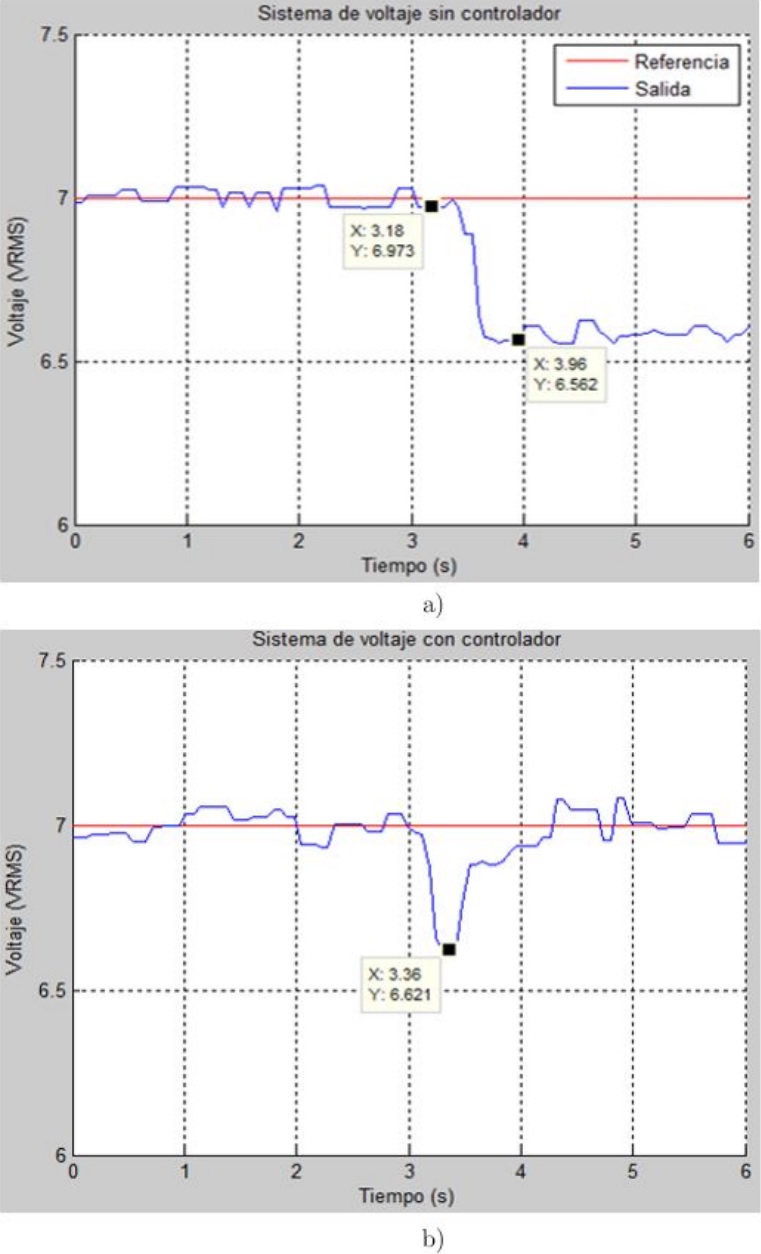
Figura 8 Comparación del sistema con y sin controlador ante la conexión de carga al sistema, a) respuesta sin controlador, b) respuesta con controlador.
La prueba realizada a continuación muestra el desempeño del controlador, con el cual hacemos énfasis que nos basamos en la precisión más no en la velocidad de respuesta, dado que se busca no tener sobrepasos porque esto afectaría no solo al sistema de generación [4–6], sino a todos los equipos que podrían estar conectados a la red eléctrica a escala, y esto se puede observar en la Figura 9, en donde se varía la referencia de la frecuencia, cambiando de 50 a 60 Hertz.
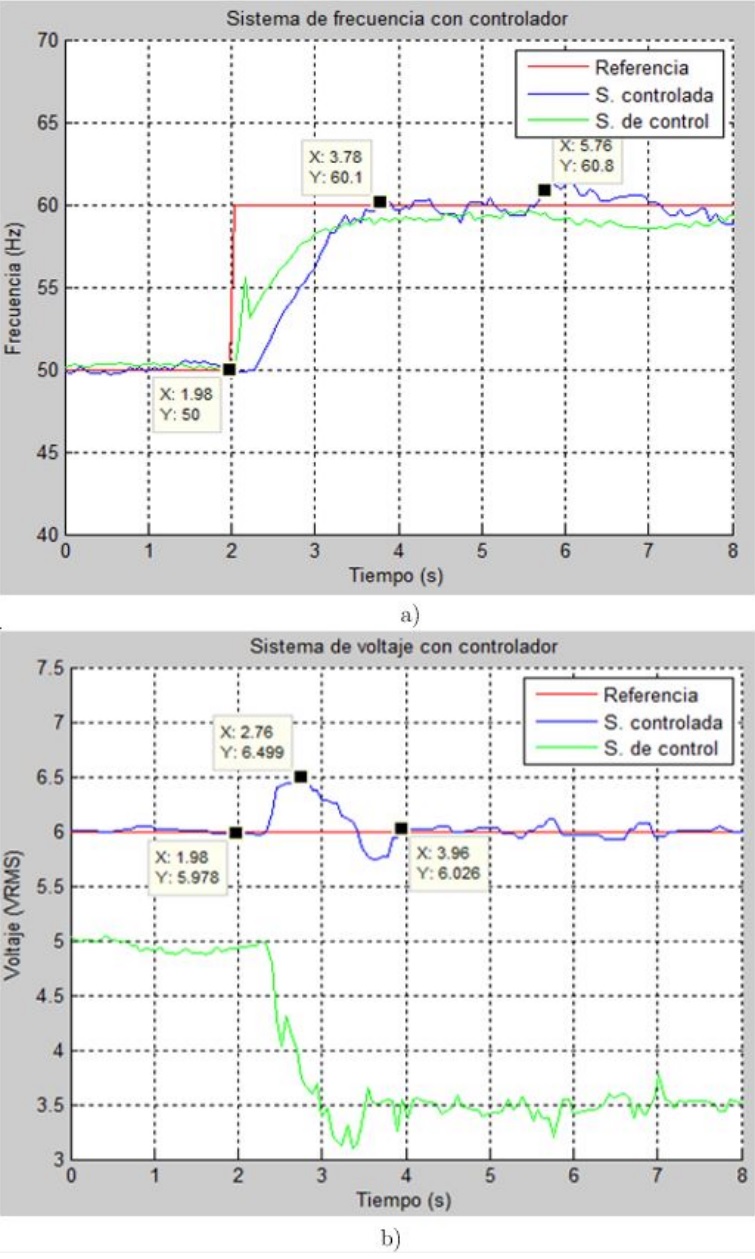
Figura 9 Respuesta del sistema con controlador y sin carga ante una variación en la referencia de la frecuencia, a) respuesta de frecuencia, b) respuesta de voltaje.
En la Figura 9 se puede observar las tres señales presentes en el sistema, en donde: la curva roja es la señal de referencia, la azul es la señal controlada y la verde es la señal de control, que en el sistema de frecuencia corresponde a la conversión del voltaje enviado al variador de frecuencia, observando que es similar a la señal controlada, es decir, está por los mismos niveles, en cambio, la señal de control en el sistema de voltaje corresponde a la tensión que se manda a una etapa de potencia en donde se amplifica el voltaje en un 100 % con una capacidad de corriente necesaria para la excitación del generador.
En cada sistema los tiempos de establecimiento divergen del sistema calculado, es decir, para el sistema de frecuencia el tiempo de establecimiento es de 1,8 segundos y en el sistema de voltaje es de 1,98 segundos por ello para procesar los valores medidos se basó en el tiempo de mayor duración con el cual el sistema se recupera.
El sistema de voltaje se ve un poco afectado por el incremento de la frecuencia y esto se ve reflejado en los sobrepasos de voltaje existentes, pero estos son corregidos por el controlador dentro de un tiempo aceptable según lo propuesto, dentro de este tiempo la respuesta varia aproximadamente en un rango de ±8 % del valor deseado.
En esta prueba se hace lo inverso que en la prueba anterior en relación del cambio de referencia de la frecuencia, obteniéndose lo indicado en la Figura 10.
En la comparación entre las Figuras 9 y 10 se puede observar que los tiempos de establecimiento varían, con lo cual se puede decir que el sistema se estabiliza de manera más rápida cuando se incrementa la frecuencia, asimismo, se puede notar cómo la frecuencia y el voltaje generados se correlacionan, es decir, un incremento o reducción repentina en la frecuencia provoca un incremento o decremento en el voltaje.

Figura 10 Respuesta del sistema con controlador y sin carga ante una variación en la referencia de la frecuencia, a) respuesta de frecuencia, b) respuesta de voltaje.
A continuación, se mostrará la reacción del sistema con el controlador cuando se realiza un cambio de referencia en el voltaje [7], en donde el sistema se encuentra generando 6 voltios de corriente alterna con una frecuencia de 60 Hz, y después de un instante se cambia únicamente la referencia de 6 a 7 voltios de corrientealterna, de esta manera, obtenemos lo indicadoen la Figura 11.
En la Figura 11 se puede apreciar cómo la señal de control inicia con un valor aproximado de 3,5 voltios y en un instante de tiempo (120 ms) pasa a un valor máximo aproximado a 6,4 voltios, la cual sirve para compensar el incremento realizado en la referencia. La variación se la realiza a los 4,2 segundos y se obtiene un valor estable a los 5,88 segundos, esto quiere decir que el sistema se estabiliza en un tiempo de 1,68 segundos.
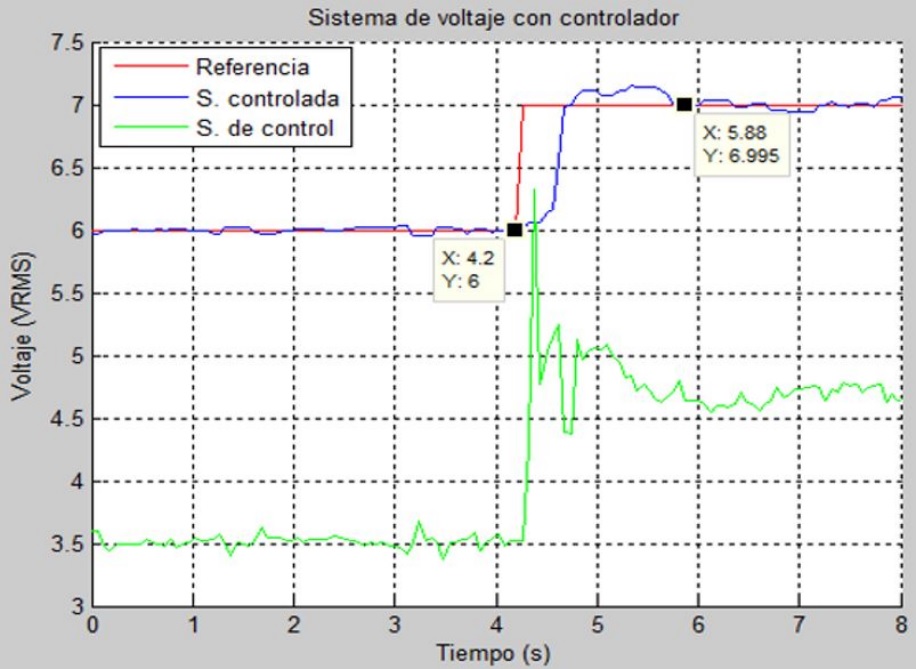
Figura 11 Respuesta del sistema con controlador y sin carga ante una variación en la referencia de voltaje.
Según los datos obtenidos se puede observar que los valores máximo y mínimo dentro de los instantes de tiempo 0 a 4,2 segundos y 5,88 a 8 segundos están dentro de valores tolerables debido a factores de adquisición, y el valor pico que tiene el voltaje hasta establecerse es de 7,15 voltios de alterna, lo que implica que el sistema se pasa de la referencia por 0,15 voltios, los mismos se reflejan como 4,2 voltios después que pasa la etapa de elevación.
Variación de la referencia de voltaje de 7 a 6 voltios manteniendo constante la referencia de la frecuencia de 60 Hertz con carga
A continuación, en la Figura 12 se puede observar cómo el controlador se comporta ante un cambio en la referencia del voltaje deseado. En este caso el pico mínimo de voltaje es pronunciado, alcanzando el valor de 5,62 voltios de corriente alterna cuando debería estar cerca de los 6 voltios de corriente alterna, es decir, su caída de tensión está alrededor de un 6,4 %.
Al observar los valores obtenidos de la experimentación, el valor de la frecuencia no varía notablemente, los únicos valores críticos que existieron en esta experimentación se dieron durante el tiempo de transición que existe desde que se cambia la referencia hasta que el sistema es estable.
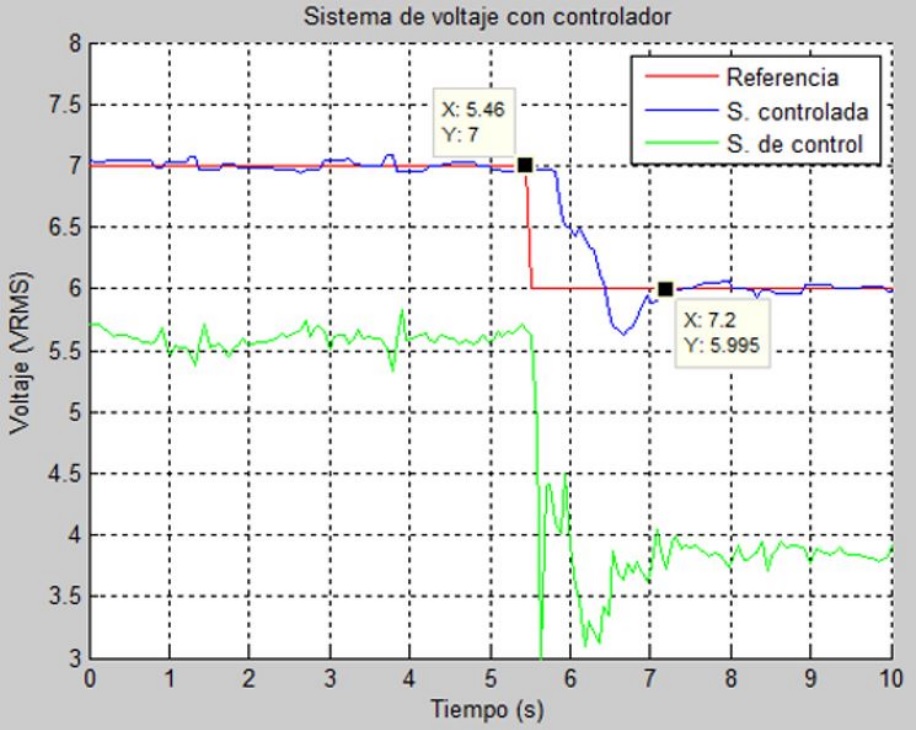
Figura 12 Respuesta del sistema con controlador y con carga ante una variación en la referencia de voltaje.
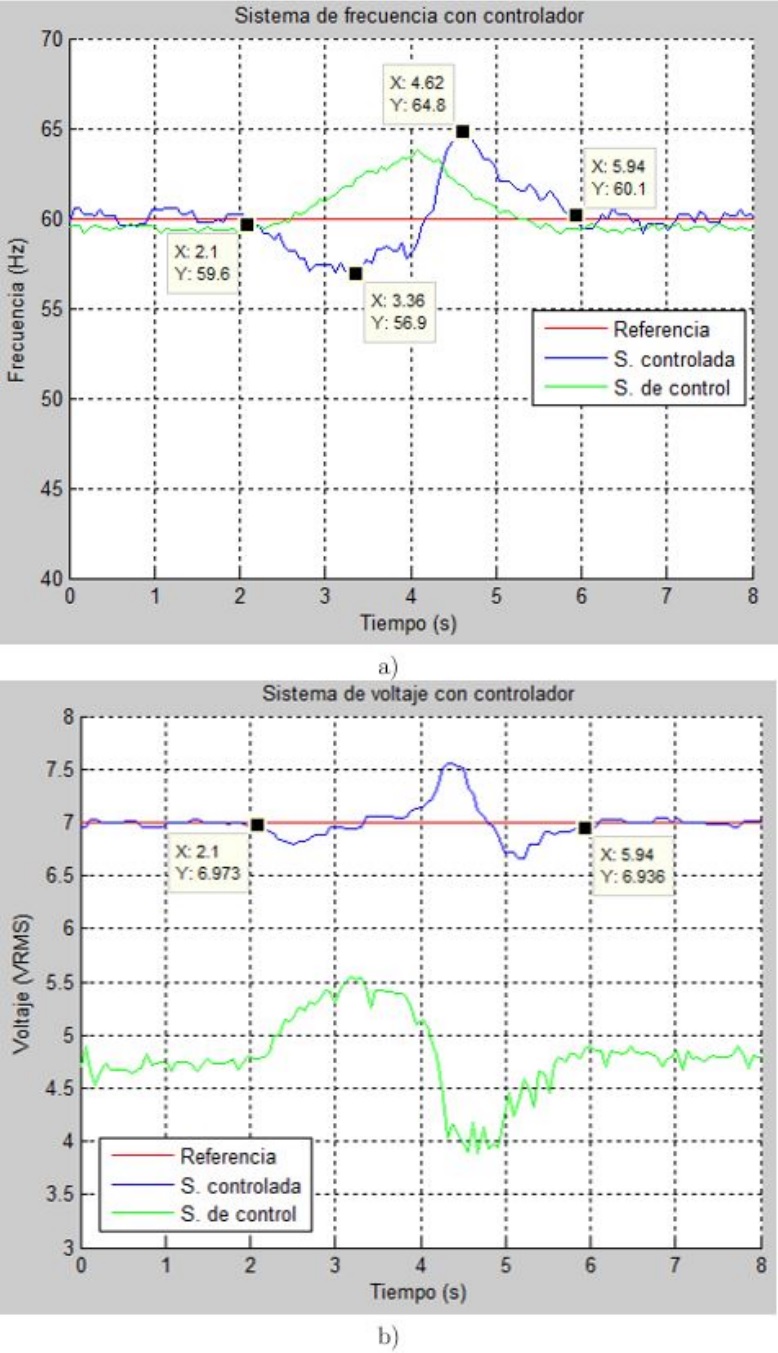
A continuación, en la Figura 13 se muestra la reacción del controlador implementado en el sistema ante la introducción de un disturbio, este disturbio representa o hace analogía a una disminución crítica en el caudal en una central hidroeléctrica, por lo tanto, ante esta perturbación en nuestro caso el controlador da más tensión al variador de frecuencia para que incremente la velocidad de giro.
Según la Figura 13, ante una caída en la frecuencia de salida el controlador incrementa su señal para compensarla, lo mismo sucede en el sistema de voltaje, pero después de un instante el sistema de frecuencia llega a un pico máximo correspondiente a 64,8 Hertz, se eleva demasiado debido a la inercia propia existente en el generador.
5. Conclusiones
Las consideraciones para el cálculo de las constantesde control son un poco variables debido a la vibraciónpropia de la máquina, sensibilidad y velocidad delsensor y por la correlación que existe entre el voltajey la frecuencia; provocando la realización de ajustespequeños en las constantes calculadas de los controladores;el ajuste realizado se basó mediante la pruebay error, tratando de obtener el mejor resultado. La velocidadde respuesta podría mejorarse si se adquirieralas señales del sensor con mayor rapidez.
El desempeño del controlador PID implementadotiene una respuesta satisfactoria a pesar de que almomento de acoplar los dos controladores aumentóel tiempo de respuesta, ya que por separado se teníaun tiempo de 1,2 segundos de estabilización y juntosaumentó a 1,8 segundos sin importar el tipo de perturbación.Una variación en la frecuencia (revoluciones en el generador) implica una variación considerableen el voltaje generado, en cambio, cuando existe unaperturbación en el voltaje no hay cambio en la frecuencia,y por medio de las pruebas realizadas se puedecomprobar cómo el controlador actúa al mismo tiempotratando de estabilizar la frecuencia y el voltaje generadopor el sistema en los valores deseados.

