











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO  uBio
uBio 
 Permalink
Permalink
Introducción
A nivel mundial, las estadísticas del número de personas desaparecidas son muy alarmantes, en España en el año 2017 se registraron 4.164 personas, en Reino Unido cada 90 segundos hay una persona que se desaparece, lo que al año se registran un total de 180.000 personas, en el caso de Europa se pierden alrededor de 2 niños cada minuto, en el año 2017 se reportaron 189.024 denuncias relacionadas a este problema ( Alternativo, 2017). En Ecuador desde enero del 2013 al 10 de diciembre del 2014 se han registrado 18.681 denuncias de desaparecidos (Fiscalía General del Estado, 2015), según el Ministerio del Interior de gobierno ecuatoriano registró al año2017, alrededor de 1.511 casos en investigación, de los cuales el 51% son mujeres y 49% hombres.
En los parques nacionales, reservas naturales y diversos tipos de atractivos turísticos existen visitas, ya sea de personas nacionales como extranjeros. En estos lugares es en donde se produce extravíos debido a variaciones en el clima, sumándose a esto la falta de guías, así como también la falta de conocimiento de las zonas que se vista. En el año 2017 se produjo el extravío de 25 personas en el Parque Cotopaxi, 4 excursionistas en la Reserva Cayambe la causa de su extravió fue debido a la ausencia de guías y por confiar en sus conocimientos en este tipo de deportes de aventura, sumándose a esto el caso de un niño de 15 años que murió ahogado en el lago Patococha a 15 minutos al Sur de Ambato, su búsqueda se dio 15 horas después de que sucedió la tragedia. Las razones de los extravíos se dan por las condiciones del clima, la densa niebla, largos periodos de tiempo de exposición al sol, provocando la desorientación de la persona. La mayor cantidad de extravíos se presenta en turistas extranjeros, en donde los lugares se sitúan en Parque Nacional Los Llanganates, así como el Río Pastaza y en las cascadas de Baños de Agua Santa. (El Telégrafo, 2017).
Debido a lo expuesto existe la necesidad de crear un prototipo de red inalámbrica para la geolocalización del usuario por medio de un dispositivo, que le permita al portador enviar alertas y permita llevar el registro de los distintos dispositivos que conforman la red inalámbrica en una base de datos en donde el administrador enviará la información al guardaparques, policía o familiares.
Metodología
Esta investigación se basa en el estudio de material bibliográfico sobre la problemática, de donde se plantean los requerimientos de hardware y software, en base a las necesidades se plantearon la concepción general del sistema, se analizó las partes que lo conforman y se determinó la configuración electrónica, como también su programación teniendo como resultado su implementación. Se realizó un análisis estadístico para analizar las variables. Su procedimiento se detalla a continuación.
Concepción general del prototipo
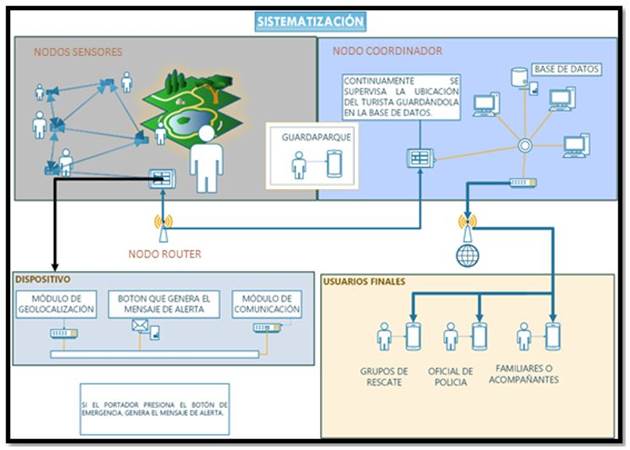
En la figura 1, se muestra la arquitectura del prototipo siendo portado por un grupo de personas, con el cual se enviará un mensaje hacia el centro de recolección de datos, el mensaje de alerta generado por un botón de auxilio donde será recibido por el administrador en el Nodo Coordinador y lo podrá replicar hacia el usuario final, para que pueda tomar las medidas correspondientes, pudiendo ser este el guardaparques, grupo de intervención y rescate, la policía, o sus familiares.
Nodo sensor
En la figura 2,se muestra el diagrama de bloques del Nodo Sensor, consta de cuatro bloques: el bloque de alimentación que cuenta con una batería recargable y un panel solar, el bloque de adquisición de datos es el encargado de la lectura de valores entregados por: el sensor GPS, que dará datos de posición, velocidad, altura, y tiempo, el pulsador que generará la alerta de auxilio, haciendo uso de un led se notifica al usuario que el botón ha sido presionado, esta información es enviada hacia el bloque de procesamiento de la información, que cuenta con una tarjeta de desarrollo que posee entradas digitales y analógicas, la medida del nivel de batería se tomará a través de una entrada analógica, el sensor GPS y el botón de auxilio usan entradas digitales, esta información es utilizada para generar la trama que se envía a través de bloque de transmisión, utilizando la tecnología inalámbrica ZigBee se logra la comunicación entre el nodo Sensor con el Nodo Coordinador.

Nodo router
El Nodo Router, tiene una arquitectura similar al diagrama de bloques del nodo sensor, la misma que se muestra en la figura 2, y consta de cuatro bloques, el bloque de alimentación que cuenta con una batería recargable y un panel solar, el bloque de adquisición de datos es el encargado de la lectura del nivel de batería censado en una entrada digital de la tarjeta de desarrollo, esta información es enviada hacia el bloque de procesamiento de la información, que cuenta con una tarjeta de desarrollo que posee entradas digitales y analógicas, esta información es usada para generar la trama para su envío a través de bloque de transmisión, utilizando la tecnología inalámbrica ZigBee se logra la comunicación entre el nodo Router con el Nodo Coordinador, además el Nodo Router es el encargado de enrutar las tramas recibidas por el Nodo Sensor hacia el Nodo Coordinador.
Nodo coordinador
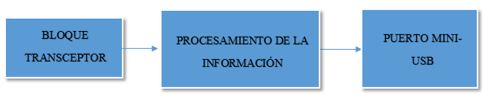
En la figura 3,se muestra el diagrama de bloques del Nodo Coordinador, consta de tres bloques, transceptor ZigBee que se encarga de la recolección de datos de todos los Nodos Sensores, y los Nodos Router, transmite la información de control de la red ZigBee determinando las rutas de comunicación, en el bloque de procesamiento de la información se separa la información de RF y se la envía a través del puerto Mini-USB hacia el computador que posee la base de datos en donde se almacenarán todos los datos recibidos.
Hardware básico del nodo sensor, router y coordinador
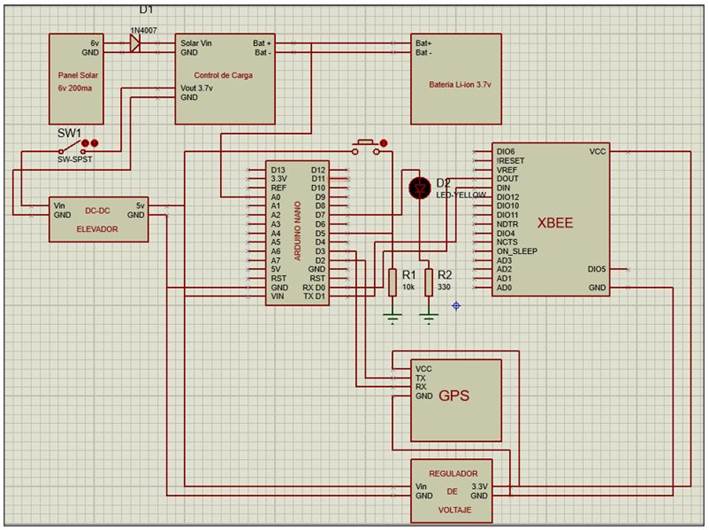
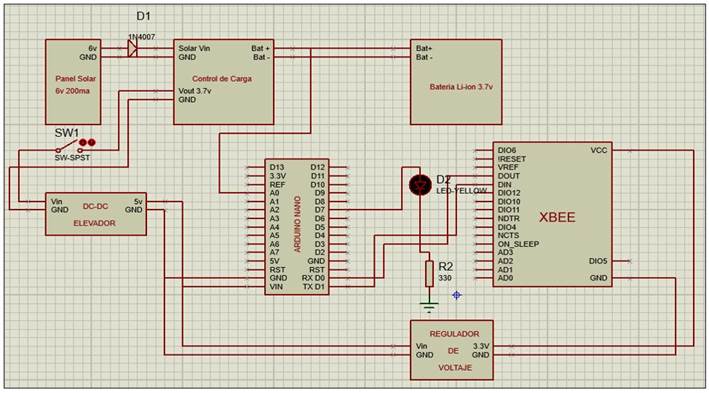
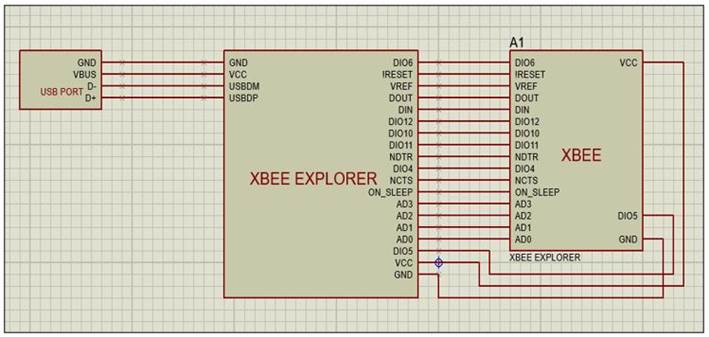
En la Figura 4, 5, 6, se visualiza el esquema de conexión de los nodos sensor, Router y coordinador, que incorporan los siguientes componentes dependiendo del tipo de nodo:
Arduino Nano placa basada en ATmega328 el cual funciona con la conexión del cable USB mini-B es alimentado por una fuente regulada por medio del terminal 27 a 5 V. Su corriente de operación es de 15 mA (Electrónica A., 2017)
Módulo XBee-PRO 900HP posee una alimentación de 2,4-3,6 Vdc, corriente de recepción de 44 mA, corriente durmiendo de 3 uA, potencia de transmisión de 24 dBm (251mW), una sensibilidad de recepción de -101 dBm, una velocidad de transmisión RF de 200 Kbps trabaja en la banda de frecuencia de 902-928 MHz (Electrocomponentes, 2013)
Tarjeta XBee Explorer que permite conectar el XBee PRO 900HP hacia el puerto serial USB del PC forma parte solo del Nodo Coordinador, tiene un bajo consumo de energía de 10 mA (Robotshop, 2017)
Módulo Ublox NEO 6M este tipo de módulo GPS tiene una antena de cerámica integrada, un voltaje de alimentación de 3 a 5 V y un consumo de 30 mA (Ublox, 2011)
Elevador de voltaje LM2577 con una tensión de entrada de 3.7-34V y un voltaje salida de 7V, el cual es muy importante para mantener un voltaje de referencia correcto para el Arduino NANO, maneja una corriente máxima de 3A (DFROBOT, 2018)
Control de carga TP4056 de baterías de Litio Lipo o de Li-ion posee un circuito para la protección de la batería, ofrece una carga de 1 A. Cuando el voltaje de la batería descienda a 2,4 V, el chip de protección lo desconectará de la carga, protege contra la sobretensión y la polaridad inversa voltaje de entrada de 4.5-5.5 V, voltaje de carga completa de 4.2V (Moviltronics, 2017)
Una batería de lipo de 3000 mAh con un voltaje de salida de 3.2-4.2V (Fullwat, 2017)
Dispone de un panel solar que consta de celdas de silicio cristalino y de 2 láminas de Etilenvinilacetato (EVA) para evitar la humedad. Tiene una tensión de trabajo de 6V, potencia de salida de 1W y una corriente nominal de 0-200 mA
Software del prototipo
El prototipo está controlado a través de programación estructurada que se detallan a continuación:
Base de datos
Diseñada en el software MySQL, gestor de base de datos el cual es de código abierto Open Source con licencia gratuita, brinda fiabilidad, rendimiento y confiabilidad, en MySQL Workbench permite modelos relacionales con sentencias de SQL para poder construir una base de datos, así como la realización de ingeniería inversa (Josefina, 2011).
Aplicación de escritorio
Se utiliza el software Visual Studio Community, que permite trabajar con Visual Studio Code que por medio de su IDE de programación permite desarrollar aplicaciones (Grupo ADSL Zone, 2017). La aplicación desarrollada posee una ventana de inicio de sesión para el control del acceso al sistema, una vez ingresado al sistema nos muestra la barra de herramientas con tres opciones Archivo, Configuración y Ayuda, en el área de trabajo muestra cinco pestañas que permiten el registro de los turistas y la asignación de un id único tomado del dispositivo asignado, la búsqueda de los datos almacenados en la base de datos, la presentación de los marcadores en un mapa georreferenciado la cuarta pestaña nos permite visualizar la trama recibida, la separación de los datos y su asignación a las variables, y en la quinta pestaña se permite mostrar la ruta que siguió un dispositivo con su marcador de inicio y finde la ruta.
Resultados
Los nodos que forman parte del prototipo fueron probados en condiciones normales y adversas, en terreno plano y montañoso, condiciones normales se refiere a un día despejado y condiciones adversas se refiere a un día nublado en donde hubo presencia de niebla en terreno montañoso.
En la figura 7, se presentan las fotografías del prototipo implementado, con el que se procedió a realizar las pruebas de funcionamiento.

Las variables para el análisis presentan un error absoluto máximo en condiciones adversas y mínimo en condiciones normales, en comparación con el dispositivo GPS Garmin Oregon 550 presenta un error de: latitud máximo de 0,00002 grados decimales y mínimo de 0,000013 grados decimales, de longitud máximo de 0,000024 grados decimales y mínimo de 0,00002 grados decimales, de altura máximo de 20,3072 metros y mínimo de 20,246875 metros, de velocidad máximo de 0.02 m/s v mínimo de 0.01 m/s. y de precisión máximo de 6 cm y mínimo de 2 cm, cuyos valores no sobrepasan el error absoluto de ubicación de 2.5m y de velocidad de 0.1m/s del sensor con lo que se demuestra que el prototipo no incorpora error a los sensores y que es competitivo con equipos comerciales de iguales características
Análisis de Cobertura
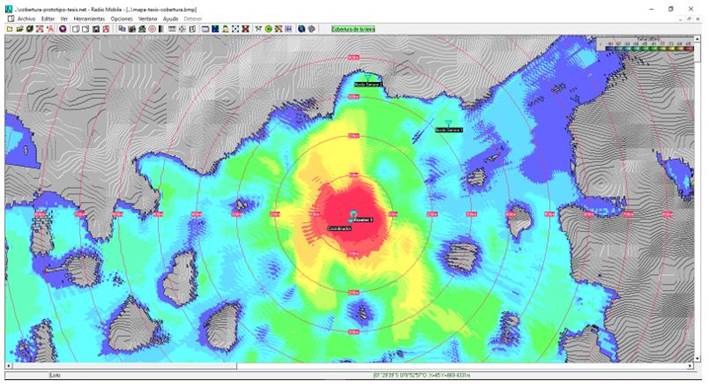
Para la evaluación de los resultados se realizaron pruebas de simulación y pruebas físicas. La etapa de simulación se la realizó por medio de la herramienta de simulación de enlaces Radio Mobile, el cual se basa en el modelo de propagación de terreno irregular Longley-Rice en el rango de los 20 MHz a 20 GHz, permite la obtención de datos de la comunicación inalámbrica como de la cobertura que proporciona determinado sistema (Mobile, 2010). Se realizó un análisis de cobertura en donde se usa un dispositivo de comunicación inalámbrica de largo alcance XBee-PRO 900HP que cuenta con una potencia de transmisión de 24dBm, tiene un alcance en línea de vista es de 6,5Km con una antena de 2,1dBi de ganancia.
En la figura 8, se muestra la cobertura del Nodo Router que posee una potencia de transmisión de 24dBm, una pérdida de conector de 0.5dB y una antena de 2.1dBi de ganancia y tienen una sensibilidad de -101dbm con lo que se obtiene un área de cobertura de entre 500m2 en terreno montañoso con el uso de antenas dipolo de 2,1 dBi, estos mismos parámetros poseen los nodos Coordinador y Sensor.
Pruebas de niveles de recepción
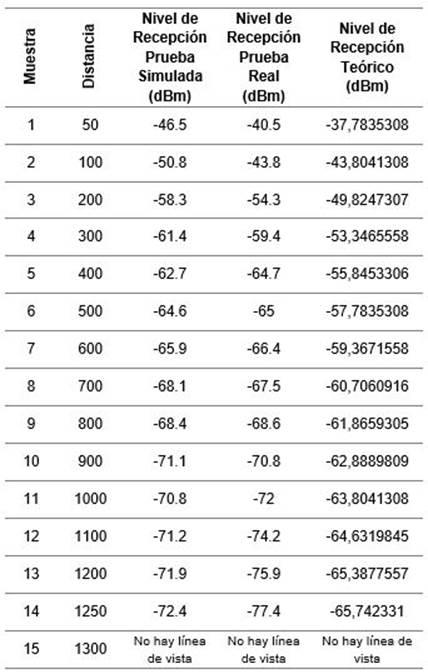
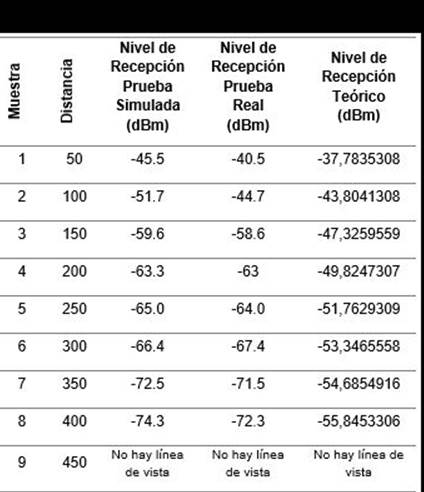
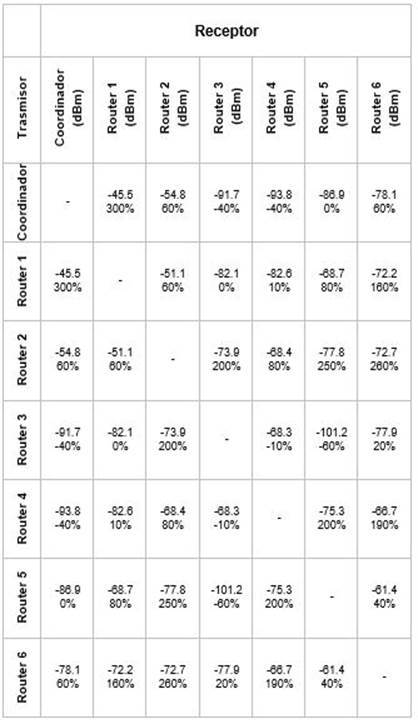
En la Tabla 1 y Tabla 2, se muestra el nivel de recepción en dBm según la distancia entre Nodo Coordinador y Nodo Router en terreno plano y en terreno montañoso en donde se verifica que al perder la línea de vista la comunicación se pierde dándonos un área de cobertura de entre 500m2 en terreno montañoso y 4500m2 en terreno plano con el uso de antenas dipolo de 2,1 dBi.
En la Tabla 1 y Tabla 2, se muestra el nivel de recepción en dBm según la distancia entre Nodo Coordinador y Nodo Router en terreno plano y en terreno montañoso en donde se verifica que al perder la línea de vista la comunicación se pierde dándonos un área de cobertura de entre 500m2 en terreno montañoso y 4500m2 en terreno plano con el uso de antenas dipolo de 2,1 dBi.
Cobertura hacia los refugios
Usando el software Radio Mobile se determinó la posición de los nodos routers que se muestran en la Tabla 3, en donde existe línea de vista con el Nodo.
Coordinador. Poseen una potencia de transmisión de 24dBm, una pérdida de conector de 0.5dB y una antena de 8.1dBi de ganancia y una sensibilidad de -101dBm.
En la Tabla 3, se muestra el nivel de potencia de recepción y Zona de Fresnel de los enlaces entre Nodos Routers y Nodos Coordinadores a lo largo de la ruta hacia los refugios obtenidos del software Radio Mobile. De los cuales los que poseen una potencia de recepción superior a -80 dBm y siguiendo la recomendación UIT- R P.530-13 que determina la necesidad de por lo menos el 60% de despeje de la primera zona de Fresnel son los enlacen cumplen los requerimientos para la propagación en el espacio libre (UIT, 2009).
En base a la Tabla 3, se determina que existen 12 enlaces con un margen superior a 20 dB con una sensibilidad del receptor de -101 dBm y una Zona de Fresnel superior al 60% por lo que se concluye que existe redundancia en la comunicación lo que permitirá mantener la comunicación al momento en que un enlace se pierda cumpliendo las recomendaciones de la UIT-R P.530-13 para la propagación en el espacio libre.
Mediciones del Nodo Sensor
Este análisis se realiza con la toma de 14 muestras durante un minuto, los datos obtenidos son enviados al Nodo Router que a su vez transmite los datos al Nodo Coordinador para almacenar la trama de datos en MySQL del computador, por medio de Microsoft Excel 2013 se calcula el coeficiente de variación la media, la desviación estándar y el coeficiente de variación de los datos según Pearson (Universidad-de-Málaga, 2016).
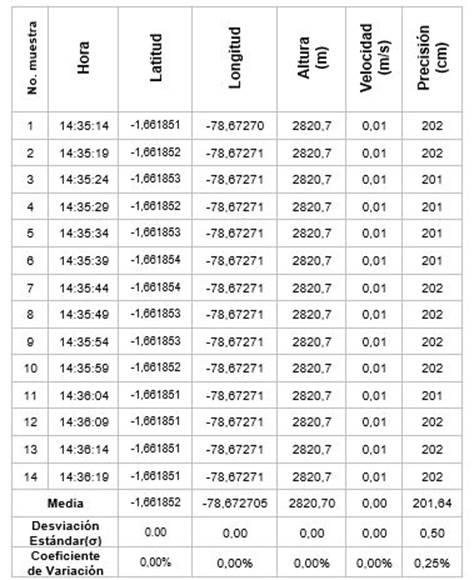
En la Tabla 4, se muestra que las lecturas de datos realizadas por medio del GPS NEO-6M fueron constantes en latitud, longitud, altura y velocidad teniendo un coeficiente de variación de 0 %, a diferencia del parámetro precisión que presenta variabilidad de 0,25 % que representa que la variabilidad es poco considerable ya que tiende a 0 según el coeficiente de variación de Pearson por lo que WGP es un prototipo confiable.
Implantación del prototipo
Esta prueba consiste en instalar y probar el funcionamiento en campo del prototipo en la entrada de la RPFCH. Se colocó el Nodo Router a una altura de 4 metros como se muestra en la figura 9 para establecer la comunicación con los Nodos Sensores.
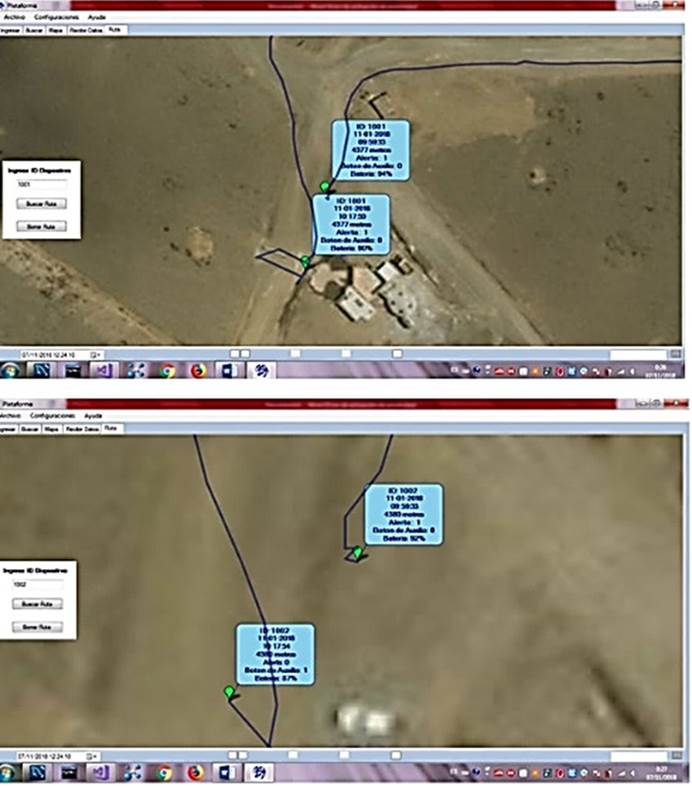
En la figura 10, se observa el mapa georreferenciado en donde se muestran los marcadores creados con los datos recibidos por el puerto serial a través de la Red ZigBee, en esta pestaña la posición de los marcadores se actualiza al momento de recibir los datos de los dispositivos, el mapa mostrado es de uso libre Open Street Maps y está almacenado en cache por lo que no es necesario el uso de una conexión a internet.


En la figura 11, se muestra el marcador de inicio de la ruta y el marcador final de la ruta con los datos de ID, fecha y hora, altura, sus estados de alerta de velocidad baja y el nivel de batería.
Consumo del prototipo
Para el análisis del consumo energético por hora se toma los valores de consumo de cada dispositivo que conforma cada nodo, como se muestra en la Tabla 5.
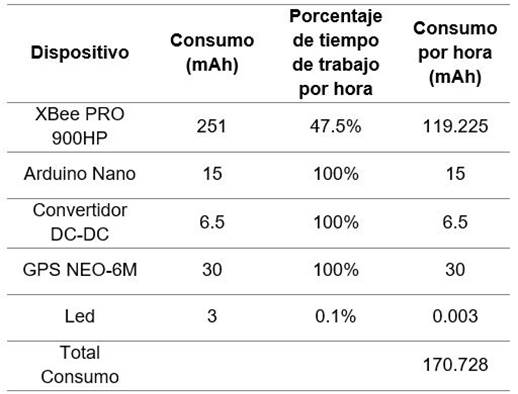
Para verificar el tiempo de duración de la batería se realizaron pruebas de tiempo de carga y descarga, como resultado se obtuvo que requiere de 3 horas y 30 minutos para completar la carga y se obtuvo una autonomía de 16 horas para el Nodo Sensor cubriendo el 400 % del uso normal de 4 horas al día y 21 horas para el Nodo Router.
Discusión
Se diseñó un prototipo de red inalámbrica para la georreferenciación y envió de alertas usando la topología de red tipo malla ZigBee que se eligió por su largo alcance entre 400 metros en terreno montañoso y 1200 metros en terreno plano con línea de vista directa.
Mediante la simulación se obtuvo que con 60 nodos sensores, la topología tipo malla posee un retardo de 2.44 segundos y una tasa de entrega del 97% superior a la topología tipo Árbol que tiene un retardo de 2.58 segundos y tasa de entrega del 94%, por lo que se utiliza la topología tipo malla.
Se determinó que las variables presentan un error absoluto máximo en condiciones adversas y mínimo en condiciones normales, en comparación con el dispositivo GPS Garmin Oregon 550 presenta un error de: latitud máximo de 0,0001360 y mínimo de 0,000013, de longitud máximo de 0,000519 y mínimo de 0,00002, de altura máximo de 87,200684 y mínimo de 20,246875, de velocidad máximo de 0.02 y mínimo de 0.02, y de precisión máximo de 6 cm y mínimo de 2 cm, cuyos valores no sobrepasan el error absoluto con lo que se demuestra que el prototipo no incorpora error a los sensores y que es competitivo con equipos comerciales de iguales características.
Se analizó que el caso más desfavorable tiene un throughput a 3 saltos de 8710 bits/s, la comunicación de 60 dispositivos con un tamaño de paquete de 680 bits toma un tiempo de 4,684 segundos, considerando que el prototipo transmite cada 10 segundos el retardo máximo es 10 segundos lo que nos da una capacidad de 128 dispositivos cubriendo el 213% de la capacidad requerida con lo que se concluye que la red es escalable y de capacidad aceptable para la aplicación desarrollada.
Las lecturas de datos realizados por medio del GPS NEO-6M fueron constantes en latitud, longitud, altura y velocidad teniendo un coeficiente de variación de 0 %, a diferencia del parámetro precisión que presenta variabilidad de 0,25 % que representa que la desviación es poco considerable ya que tiende a 0 según el coeficiente de variación de Pearson por lo que WGP es un prototipo confiable.
Se realizó las pruebas de cobertura con un Nodo Router dándonos un área de cobertura de entre 500m2 en terreno montañoso y 4500m2 en terreno plano con el uso de antenas dipolo de 2,1 dBi, y se realizó el estudio de cobertura para la ruta hacia los refugios en donde se comprobó que es necesario la implementación de 6 nodos routers para la cobertura de la ruta de 10.1Km hacia los refugios cubriendo un área de 20197 m2 con antenas dipolo de 8.1dbi lo que representa el 97,3% del total de la ruta y que existen 24 enlaces con un margen superior a 20 dB con una sensibilidad del receptor de -101 dBm comprobando que existe redundancia en la comunicación lo que permitirá mantener la comunicación al momento en que un enlace se pierda.
Se verificó el tiempo de autonomía energética de los Nodos Sensores y Nodo Router que disponen de una batería de 3000 mAh con lo que los Nodos Sensores tienen una autonomía de 16 horas, el Nodo Router al tener un menor consumo energético obtuvo una autonomía de 21 horas.
Se determinó que el Nodo Sensor 1 y 2 tienen un costo de $ 287,36 cada uno, el Nodo Coordinador con $165,03, y el Nodo Router con un costo de $271,59 el costo total del prototipo es de $1011,34, teniendo en cuenta la cantidad de 60 Nodos Sensores 6 Nodos Router y un Nodo Coordinador se estimó la cantidad de $19036.17 sin incluir costos de instalación ni estructuras, para cubrirla ruta hacia los refugios de la RPFCH que no se puede comparar el valor de un sistema comercial ya que hasta la presente fecha no existe un sistema electrónico de similares características o investigaciones en desarrollo que se relacionen a la temática que aborda esta investigación.
En comparación con un GPS comercial con características similares al Nodo Sensor que conforma el prototipo de red de georreferenciación propuesto tiene un costo menor al 50%, por lo que se concluye que el prototipo es de bajo costo y es único en su tipo.x1

