











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
Según la nota descriptiva N°282 de la Organización mundial de la Salud se estima que en el mundo hay aproximadamente 285 millones de personas con discapacidad visual, de las cuales 39 millones son ciegas y 246 millones presentan baja visión 1.
En Ecuador mediante el Registro Nacional de Discapacidades realizado por el Ministerio de Salud Pública, se conoce que existe un total de 48695 personas que presentan una discapacidad de tipo visual 2.
La evolución de la visión artificial, desde que se inventó la fotografía ha intentado extraer características físicas de las imágenes. Como el análisis de radiografías que transformó la Medicina.
Muchas investigaciones se han centrado en, capturar la información visual del entorno físico para extraer características relevantes visuales 3, que utilizan principios ópticos de la fotorretinosciopia.
Instituciones oftalmológicas realizan el examen de retinoscopía mediante un dispositivo llamado retinoscopio que se sostiene en la mano, es una técnica que determina el error de refracción del ojo (Miopía, hipermetropía o astigmatismo) y determina si debe o no el paciente utilizar anteojos. Pero es una técnica manual en la que el oftalmólogo debe estar presente y cada prueba se lo realiza por separado 4.
El propósito de este estudio es automatizar el proceso para exámenes de retinoscopía utilizando visión artificial, diseñando el sistema mecánico - electrónico y programando un algoritmo para el procesamiento y comparación de imágenes de la retina con el fin de mejorar el proceso del examen.
Examen de rinoscopía
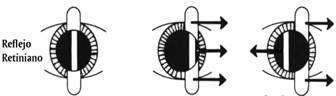
El examen de retinoscopía se realiza mediante sombras de tipo directas: cuando el movimiento del haz de luz del retinoscopio y el reflejo retiniano tiene la misma dirección. En caso contrario son sobras inversas cuando presenta direcciones opuestas, se puede observar en la Fig 1. 5.
El proceso manual para realizar el examen de retinoscopía se puede observar en la Fig 2.
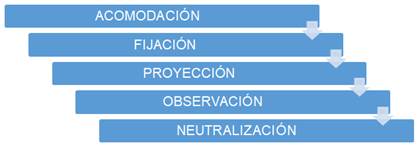
Para realizar el examen es necesario mantener una iluminación baja o penumbra, siendo el estado de la luz un factor importante para poder facilitar la observación de las sombras. Primero se realiza la acomodación de la persona, una vez ubicada se procede a la fijación de su vista en un punto, mientras mantiene sus dos ojos abiertos 6. El examinador con su retinoscopio procede a la proyección de un haz de luz que se mueve de manera horizontal y vertical en el ojo. Mientras analiza los reflejos mediante la observación del movimiento de los mismos. Según esto, el examinador procede a su neutralización mediante la adición de lentes positivos o negativos 7, las anomalías obtenidas se pueden observar en las Fig 3., Fig 4. y Fig 5.


Metodología
Las etapas a seguir para el diseño son: diseño mecánico, diseño electrónico y algoritmo de visión artificial.
Diseño mecánico
Para la proyección del haz de luz se diseñó un mecanismo que cuenta con actuadores, servomotores que replican el movimiento realizado por la muñeca del médico, se puede observar en la Fig 6.

El cambio de las lentes oftálmicas se realiza con un mecanismo de rueda, se puede observar en la Fig 7., misma que tiene 18 divisiones en las que se encuentran las distintas lentes positivas y negativas usadas en nuestro sistema.

Diseño electrónico
El esquema de conexión electrónico se puede observar en la Fig 8., el elemento central es una tarjeta Arduino Uno que tiene la función de maestro, se comunica con todos los componentes que integran la placa y se encarga del control de los mismos.
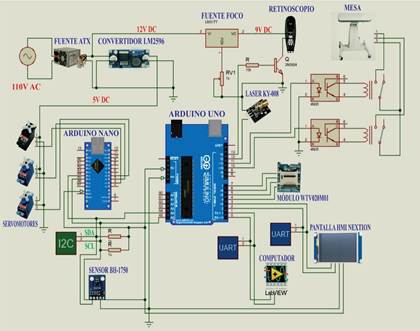
Los terminales A4 y A5 del Arduino Uno y Arduino Nano se conectan entre sí para poder establecer una comunicación I2C mediante las líneas SDA y SCL. Esta comunicación permite enviar y recibir órdenes entre los Arduinos, además de la lectura del sensor BH-1750 que cuenta con esta comunicación.
La señal del sensor de luz BH-1750 se conecta a los terminales D4 (SDA) y D5 (SCL) de la comunicación I2C mediante dos resistencias de 1K.
Los terminales RESET, CLOCK, DATA y BUSY del módulo MP3 WTV020M01 se conectan a D4, D5, D6, D7 del Arduino Uno permitiendo el control del módulo desde estas líneas de comunicación.
De los terminales D10 y D11 del Arduino Uno, salen las señales de control para subir y bajar la mesa, estas señales de control van hacia los opto acopladores, separando con esto la etapa de control y fuerza representada esta última por los relés.
El terminal D12 y D13 del Arduino Uno, manda las señales de control de ON/OFF al diodo laser KY-008 y al foco del retinoscopio respectivamente.
La pantalla HMI Nextion se conecta a las terminales D2 y D3 del Arduino Uno, mismas que funcionan como las líneas de comunicación serial TX/RX entre Arduino y la pantalla.
El Arduino Nano se encarga de los actuadores, mismos que se encuentran conectados a las terminales D3, D4, D5 permitiendo el control de los servomotores que mueven los mecanismos de cambio de lentes y proyección del haz de luz, mientras el controlador Arduino Uno realiza sus demás funciones.
La alimentación para los componentes del sistema electrónico, se da mediante la salida de 12V DC de la fuente ATX, esta salida es regulada a 5V y 9V para alimentar los servomotores, y el foco del retinoscopio respectivamente mediante el conversor de voltaje LM2596 y el regulador LM317.
Algoritmo de procesamiento de imágenes
El diseño cumple con las siguientes etapas, se puede observar en la Fig 9.
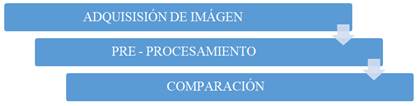
Adquisición de Imagen
El proceso inicia con el ingreso del usuario, luego se procede a adquirir la imagen de las sombras de su retina mediante una cámara digital Genius F100, que cuenta con un sensor de imagen de 1080p Full HD pixel CMOS que ayuda a tener una mejor adquisición de imágenes con una resolución de 12MP.
Pre- Procesamiento
Mediante la herramienta Vision Assistant de Labview se procesa la imagen RGB transformándola en una imagen en escala de grises, aplicando el brillo necesario para aclarar los detalles, mediante un filtro de mediana se elimina ruido y detalles innecesarios 8. El resultado del mismo se puede se puede observar en la Fig 10., Fig 11., Fig 12., Fig 13.




Comparación
En esta etapa se utiliza el programa Microsoft Access como sistema de gestión de base de datos, en el cual se guardan las imágenes de las sombras de la retina del ojo con las distintas ametropías.
Para la comparación de imágenes se emplea el complemento MathScript de LabVIEW. El proceso de comparación de imágenes está basado en el coeficiente de correlación.
El coeficiente de correlación es una técnica que mide el grado de relación entre dos variables aleatorias 9. Al obtener las imágenes procesadas y transformadas en un arreglo bidimensional, se envían al algoritmo de comparación de imágenes para calcular su coeficiente de correlación utilizando las siguientes fórmulas.
 (1)
(1)
 (2)
(2)
 (3)
(3)
Covarianza: Es la sumatoria del producto de cada elemento de la primera matriz con su correspondiente de la segunda matriz, dividido para el número total de elementos de la matriz y esto menos el producto de las medias aritméticas de las dos matrices.
 (4)
(4)
Desviación típica: Es igual a la raíz cuadrada de la diferencia entre la sumatoria de todos los elementos elevados al cuadrado de la matriz sobre el número total de elementos de la misma y el cuadrado de su media aritmética.
 (5)
(5)
 (6)
(6)
Coeficiente de correlación: es la división entre la covarianza y el producto de la desviación típica de cada matriz.
 (7)
(7)
donde x es un arreglo bidimensional de la imagen de la cámara, y es un arreglo bidimensional de la imagen de la base de datos, i es el número de fila, j es el número de coluna, n es el número de filas totales de la matriz y m es el número de filas totales de la matriz.
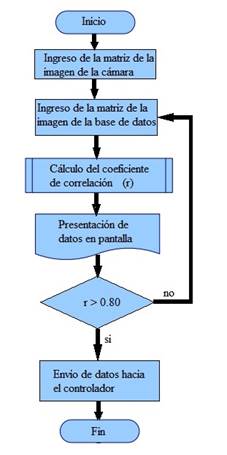
El diagrama de flujo del algoritmo de comparación de imágenes, se puede observar en la Fig 14., las matrices de cada imagen son los datos de entrada para iniciar este proceso.
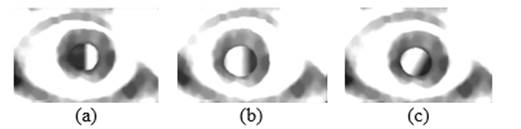
En la Fig 15. (a) se muestra el procesamiento de un ojo con miopía, (b) procesamiento de un ojo con Hipermetropía y (c) procesamiento de un ojo astigmatismo.
RESULTADOS
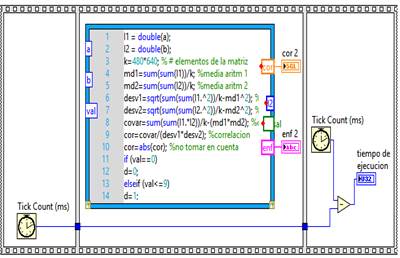
Se realizó una prueba para determinar el tiempo en el que se ejecuta la comparación de las imágenes tomando una muestra de 50 datos por cada ametropía visual. Estos datos se tomaron realizando una medición del tiempo de ejecución de la etapa de comparación. Se ingresó en una estructura de secuencia, los comandos Tick Count 10, los cuales se restan entre sí para mostrar el valor del tiempo de ejecución de esa etapa, se puede observar en la Fig 16.
La ecuación (8) muestra el tiempo de ejecución de la comparación de imágenes cada vez que se ejecute el algoritmo.
 (8)
(8)
Tomado los tiempos para cada ametropía se utilizó la estadística descriptiva con un nivel de confianza de 95.0 %, que es un nivel habitual para hacer declaraciones con una razonable probabilidad de acierto, y utilizando el software estadístico SPSS se obtuvo los siguientes resultados mostrados en la Tabla 1.
Los datos más representativos como el error típico son bajos teniendo un máximo de 2.8 para Hipermetropía que cuantifica cuánto se apartan los valores de la media. Se obtuvo una dispersión estándar con respecto a la media siendo igualmente mayor para la Hipermetropía. La asimetría y curtosis informan sobre la forma de la distribución pudiéndose observar baja variación con respecto a la media.
Tabla 1 Indicadores estadísticos de la detección
| Indicador | Ojo Sano | Miopía | Hipermetropía | Astigmatismo |
|---|---|---|---|---|
| Media (ms) | 162,28 | 166,02 | 170,7 | 174,74 |
| Error típico | 1,4988 | 2,3336 | 2,8427 | 1,9973 |
| Mediana (ms) | 163 | 164 | 167 | 170 |
| Moda (ms) | 163 | 164 | 161 | 170 |
| Desviación estándar | 10,5984 | 16,5016 | 20,1010 | 14,1230 |
| Varianza de la muestra | 112,3281 | 272,3057 | 404,0510 | 199,4616 |
| Curtosis | -0,0390 | 0,4864 | 3,7100 | -0,3974 |
| Coeficiente de asimetría | -0,5781 | -0,0852 | 1,4617 | 0,2370 |
| Rango | 44 | 77 | 114 | 68 |
| Mínimo | 140 | 125 | 131 | 142 |
| Máximo | 184 | 202 | 245 | 210 |
| Suma | 8114 | 8301 | 8535 | 8737 |
| Cuenta | 50 | 50 | 50 | 50 |
| Nivel de confianza (95,0%) | 3,0120 | 4,6897 | 5,71264 | 4,0137 |
La media aritmética es el factor más importante ya que muestra el tiempo promedio en que se ejecuta la comparación de cada ametropía 11.
Tabla 2 Tiempo de comparación según la ametropía
| Tiempo (ms) | Ametropía | |
| 162,28 | 1 | Sanos |
| 166,02 | 2 | Miopía |
| 170,7 | 3 | Hipermetropía |
| 174,74 | 4 | Astigmatismo |
El tiempo de comparación de las imágenes según la ametropía se puede observar en la Fig 17.
Según la ecuación (9), la variación del tiempo de comparación entre miopía y sano es:
 (9)
(9)
de donde se obtienen un valor de variación igual a 2.25%
Aplicando esta ecuación a cada una de las variaciones de ametropías se obtiene los siguientes resultados.
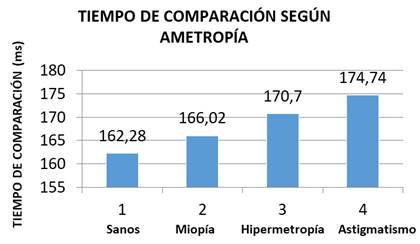
Tabla 3 Variación de tiempo entre ametropías
| Variación | % variación | |
|---|---|---|
| 3,74 | 2,25% | |
| 4,68 | 2,74% | |
| 4,04 | 2,32% | |
| promedio: | 2,44% |
En la Tabla 3., se muestra el promedio de la variación del tiempo de comparación de imágenes con un valor de 2.44%, lo cual indica que mientras mayor es el daño refractivo mayor es el tiempo de comparación de las imágenes.
Discusión
Los hallazgos obtenidos en la comparación de imágenes de la retina del ojo empleando el coeficiente de correlación, dan como resultado los siguientes tiempos: ojos sin ametropía se comparan en 162,28 ms, con miopía en 166,02 ms, con hipermetropía en 170,7 ms y con astigmatismo en 174,75 ms.
Una explicación para que el tiempo de comparación de las imágenes incremente, es que el tiempo aumenta mientras mayor sea el daño refractivo.
Este estudio fue limitado por condiciones de iluminación al momento de capturar la imagen de la retina, razón por la cual se puede utilizar distintos filtros. Siendo el filtro de la mediana el utilizado en esta investigación debido a que elimina el ruido de la imagen reemplazando cada pixel por la mediana de los pixeles vecinos.
En trabajos futuros se puede utilizar otros algoritmos en análisis entre similitud de imágenes, pudiendo realizarse un estudio de costo computacionales. Además de utilizar otras técnicas de detección de aspectos como borde de Sobel, Canny que ayuden a mejorar los tiempos de respuesta y además muestre guías para nuevas líneas de investigación en diferentes campos.
Conclusiones
Se logró utilizar la visión artificial mediante el coeficiente de correlación para determinar ametropías en la retina del ojo, para ello se realizó el sistema mecánico, electrónico y el algoritmo necesario para el análisis de las imágenes. Se realizó un pre procesamiento de la imagen debido al ruido, utilizando el filtro de mediana para su corrección. En la comparación mediante el coeficiente de correlación se determinaron tiempos que aumentaban según el grado de cada ametropía. Obteniendo una variación de tiempo del 2.44%. El cambio de lentes corrige la refracción del haz de luz sea de sombras directas o inversas.

