











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkI Introducción
Los sistemas radares fueron diseñados para ambientes bélicos (Sanfuentes 2000) y hasta la actualidad se han aplicado en diferentes áreas como: la meteorología, control de velocidad marítima/aérea, radares doppler, entre otros, y han complementado varios estudios relacionados con necesidades presentes en la sociedad (de la Mata 2012), (Gutierrez 2006), que requieren de sistemas tecnológicos confiables.
La tecnología Software Defined Radio (SDR) se presenta como una alternativa para diseñar prototipos a bajo coste (Constanzo 2013), debido a que es confiable y adaptable a diferentes necesidades. En otras investigaciones se han analizado las capacidades de aplicar tecnología SDR para sistemas radares, propuestas que han sido aceptadas (Patiño & Serrano 2014), así mismo se han realizado investigaciones implementadas con FPGA (Field Programmable Gate Array) (Hernández 2005), (Yang & Fathy 2009) sin embargo, presentan costos son elevados.
Uno de los inconvenientes de la tecnología SDR, es el ancho de banda que proporcionan para ser aplicados en sistemas SDRadar, que es una característica importante que depende de la capacidad de detección de dos objetivos o blancos en el rango, lo que es mejor conocida como resolución.
La tarjeta USRP B210, es una tarjeta con tecnología SDR que cuenta con características propias dadas por su fabricante ETTUS RESEARCH, las cuales han sido analizadas para determinar cuál es la mejor resolución que las tarjetas pueden proporcionar para ser aplicadas en sistemas SDRadar.
Al investigar y analizar las características operativas de la tarjeta USRP B210 (Aldaz 2005), se ha desarrollado un algoritmo en MATLAB® que ha permitido optimizar la resolución de la tarjeta. Mediante un método cuantitativo, se ha escogido la mejor opción al evaluar la confiabilidad del algoritmo mediante simulaciones.
II Sistema Radar
Resolución en Sistemas Radares
Para la detección de objetivos aparece el concepto de resolución como la capacidad de un radar para distinguir dos o más blancos que están estrechamente espaciados, ya sea en rango, ángulo o frecuencia Doppler (Richards 2010).
El rango de resolución puede ser calculado al considerar aspectos como ancho de banda, B, exactitud de la distancia, e d , velocidad de la luz, c, frecuencia máxima, f max , y frecuencia de muestreo, f s , como se muestra en y (Barbería & Dominguez 2016).

Donde la resolución del Sistema está dada por:
En base a se observa que a mayor ancho de banda se obtiene una resolución menor.
Radar FMCW
El radar de onda continua en frecuencia modulada (FMCW) es un tipo de radar que irradia potencia de transmisión continua como un simple radar de onda continua. Estos radares son modulados en frecuencia lo que permite variar su frecuencia de operación durante la medida.
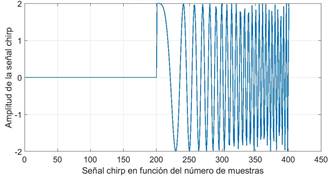
La Fig. 1 muestra una señal chirp generada por un radar FMCW, llamándose up-chirp cuando se genera una señal desde una frecuencia baja a una alta y down-chirp cuando la frecuencia para generar la señal va de una alta a baja (Alvarez & Shagñay 2015).
La distancia máxima, d max , con la que se puede detectar un objetivo es codificada en frecuencia de acuerdo al tiempo máximo, t f , que genera la señal.

Las características que presentan estos radares son: simplifica el diseño del transmisor (Charvat 2014), procesamiento sencillo de la señal, sistema a bajo coste, en el dominio del tiempo la señal se presenta como un chirp, en el dominio de la frecuencia se representa como una rampa lineal, la medición de la distancia se obtiene al comparar la señal transmitida o de referencia con la señal recibida o señal eco (Wolff 2017), capacidad para medir simultáneamente el rango del objetivo y su velocidad y alta exactitud de la medición del alcance.
Bajo estos conceptos que se han adaptado a las necesidades de esta investigación, se optó por usar este tipo de radar por las ventajas y características mencionadas.
Señal Transmitida
La señal que transmite un radar FMCW se representa de acuerdo a la función V(𝑡).

donde V0 es el valor de amplitud, φ0 es el desfase existente de la onda sinusoidal y la función f (t) representa el valor de la frecuencia que varía linealmente en función del tiempo, que viene dada por:

donde k representa la constante de la cual depende la función para variar su frecuencia, que está dada en función de la frecuencia inicial, f i , y la frecuencia final, f0, como sigue:

El ancho de banda, B, del sistema, se obtiene de la diferencia B = f0 - f i . Al reemplazar el ancho de banda en (6) se obtiene:

Señal Recibida
La señal recibida es una señal similar a la transmitida, pero retardada un tiempo t r debido al tiempo de escucha como se observa en la Fig. 2, lo cual es importante para detectar el objetivo.

Detección del Objetivo
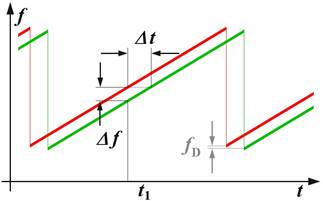
Cuando una señal de eco es recibida, esta variación de frecuencia causa un retardo ∆t (i.e., desplazamiento de tiempo) tal como sucede en la técnica de pulsos radar, por lo que se realiza una comparación entre la señal transmitida y el eco de la señal recibida, esto se observa en la Fig. 3.
La distancia R hacia el objeto reflectante puede ser determinada mediante:

donde c es la velocidad de la luz (i.e., 3×108 m/s), ∆t es el retardo de tiempo s, ∆f es la diferencia de frecuencia medida Hz, R es la distancia entre la antena y el objeto reflectado m y df/dt es el cambio de frecuencia por unidad de tiempo.
Si el cambio en la frecuencia es lineal sobre un intervalo amplio del espectro, entonces el rango del radar puede ser determinado por una simple comparación de frecuencia. La diferencia de frecuencia ∆f es proporcional a la distancia R.
Como solamente se puede medir el valor absoluto de la diferencia de frecuencia (i.e., no existen valores negativos de frecuencia), los resultados de un incremento lineal de frecuencia son iguales a los de un decremento lineal de frecuencia, esto en un escenario estático, es decir sin efecto Doppler. En el caso de un objeto reflectante con una velocidad radial con respecto a la antena receptora, se debe realizar el análisis del efecto Doppler correspondiente en el cual ocurrirá un desplazamiento de la frecuencia portadora correspondiente (Wolff 2017), este efecto se observa en la señal diente de sierra equivalente a la imagen reflejada de la Fig. 3
Al escoger correctamente la desviación de frecuencia por unidad de tiempo, se puede determinar la resolución del radar, y mediante la selección de la duración del incremento de la frecuencia (i.e., el flanco más largo de la señal diente de sierra, línea roja en la Fig. 3), se puede calcular la máxima distancia no ambigua medible. La máxima variación de frecuencia y la pendiente del flanco se pueden variar al considerar las capacidades tecnológicas del circuito implementado.
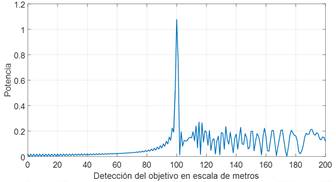
La detección de un objetivo dependerá del valor de la resolución, su resultado será en múltiplos de ∆R. El radar FMCW, para ubicar el objetivo, realiza la multiplicación de las dos señales (transmitida/recibida) FMCW en el dominio del tiempo (10), para esto es necesario de la utilización de la Transformada de Fourier Rápida (FFT), la misma que permite pasar del dominio del tiempo al dominio de la frecuencia, y permite representar al objetivo como un pico con el valor máximo según su radargrama, el cual se muestra en la Fig. 4.
III Análisis USRP B210
Software Defined Radar (SDRadar)
La tecnología de Sistemas SDRadar reduce el uso de hardware (e.g., generadores de señal, mezcladores, moduladores, filtros), mediante la implementación vía software mediante sistemas embebidos o FPGA.
Estos sistemas conocidos como SDRadar (Software Defined Radar), reducen considerablemente los costos de implementación con una gran variedad de versatilidades, capacidades y aplicaciones, como se muestra en la Fig. 5.
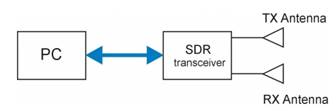
Un sistema de medición clásico de radar se compone de hardware dedicado, y depende de la aplicación (e.g., Doppler, clima, Radar de penetración terrena, entre otros). La nueva concepción de Software Defined Radar provee un alto grado de flexibilidad y adaptabilidad para varias técnicas de procesamiento de señal. En un sistema de SDRadar la mayoría de las operaciones concernientes al procesamiento de señal se llevan a cabo vía software; esto permite la creación de un radar multi propósito cuyos diferentes algoritmos, para cada aplicación, toman lugar en el mismo dispositivo. Los algoritmos necesarios de procesamiento de datos están directamente conectados a un terminal de PC.
La clave de SDRadar es la generación de la señal, la cual está relacionada al tipo de señal que será transmitida y después procesada. Existen varias técnicas que permiten la generación de una señal adecuada para SDRadar: la codificación a través de la modulación de un tren de pulsos binarios, modulación a través de señales ortogonales (OFDM), o Modulación de Frecuencia a Onda Continua (FMCW), entre otras.
Cada una de estas técnicas utilizan diferentes modelos matemáticos; e.g., FMCW genera una señal sinusoidal cuya frecuencia cambia con respecto al tiempo transcurrido. Esto significa que la frecuencia se incrementa tanto como dura la señal. Este tipo de señal y su respectivo procesamiento en frecuencia puede ser muy útil para determinar distancias de objetivos, el movimiento de los mismos e incluso su velocidad.
Con estas aplicaciones, es posible realizar ciertas variaciones en el desarrollo del software del radar y crear diversos sistemas, solamente mediante el cambio de la programación y procesamiento de datos, tal como el cálculo de la permitividad relativa de un substrato dieléctrico.
Características USRP B210
Las características de la tarjeta USRP B210 que han sido utilizadas para elaborar el algoritmo se detallan en la Tabla 1.
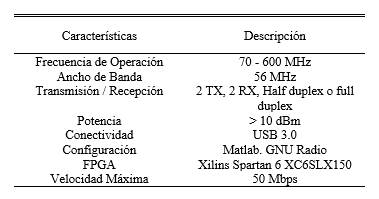
Conectividad
La tarjeta para ser configurada por software necesita de una conexión por medio de un puerto USB 3.0, que corresponde a una velocidad de 3.2 Gbps equivalente a 56 MHz de ancho de banda máximo de la señal FMCW (Requena & Beltrán 2015). Sin tomar en cuenta que los sistemas radar usan el mismo puerto USB para transmisión y recepción lo cual divide su capacidad de transmisión.
Cabe mencionar que las tarjetas B210 también pueden trabajar a través de un puerto USB 2.0, pero la velocidad (480 Mbps equivalente a 8 MHz de ancho de banda máximo de la señal FMCW) es menor en comparación al puerto USB 3.0, por lo que es recomendable usar el puerto USB 3.0 para aplicaciones SDRadar.
Transmisión / Recepción
Una de las principales características de la tarjeta USRP B210 es que cuentan con 2 puertos de transmisión (TX) y 2 puertos de recepción (RX), para una comunicación half-dúplex o full-dúplex. Uno de los inconvenientes de usar la B210 como transceptor es el uso de recursos computacionales.
Configuración (software)
USRP B210 presenta dos opciones de configuración de software, por medio de MATLAB® y GNU RADIO.
Para la configuración del software mediante MATLAB® existen paquetes desarrollados por ETTUS que hacen posible la comunicación MATLAB-USRP B210, pero una desventaja que presenta esta comunicación es que MATLAB® al ser un potente software ocupa recursos computacionales (Mathworks 2017), lo cual incrementa los recursos necesarios ya que la USRP B210 en si necesita de la conectividad USB 3.0 que representa más carga computacional al sistema.
Para reducir la carga computacional que provoca un sistema SDRadar, GNU RADIO es una alternativa a este problema ya que al ser un conjunto de herramientas de desarrollo de software libre y de código abierto que proporciona bloques de procesamiento de señales para implementar radios de software (Ettus 2017), reduce notablemente el uso de recursos computacionales. Aunque existen distribuciones de GNU RADIO para sistemas operativos como Linux, Windows o MAC, es recomendable usar LINUX ya que por características este Sistema Operativo es más robusto, rentable y rápido (Mejía 2012).
Velocidad Máxima de Transferencia de datos
Ya en otras investigaciones se ha analizado sobre como la velocidad máxima de transferencia de datos influye en el ancho de banda para sistemas SDRadar (Constanzo 2013), (Merchán 2016), en este caso para USRP B210 se tiene una velocidad de transferencia de 50 Mbps, sin embargo, debido a que la USRP utiliza muestras complejas I/Q, el ancho de banda B con el cual se puede trabajar es de 25 MHz. Al reemplazar el valor de ancho de banda en (2) se obtiene ∆R = 6 m.
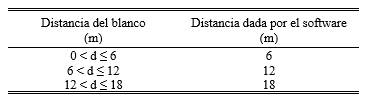
El valor de ∆R es la capacidad que tiene el radar para distinguir un blanco en múltiplos de 6 m. La Tabla 2 detalla cómo se puede distinguir un blanco de acuerdo a la resolución.
Potencia de Salida
Es importante que los sistemas de comunicaciones como los sistemas SDRadar cuenten con una potencia de salida adaptable a los diferentes escenarios, utiliza una menor potencia cuando se requiere cubrir una distancia corta y una mayor potencia para distancias mayores. A pesar de que la tarjeta USRP B210 en su hoja técnica (Ettus 2017) menciona que puede irradiar una potencia > 10dBm, estudios han demostrado su inconsistencia al momento de ser ejecutada en tiempo real, y se recomienda que las antenas deben estar separadas a pocos centímetros por sus problemas en potencia (Saraguro 2016), lo que dificulta su implementación para SDRadar debido a que necesita una gran cantidad de potencia para cubrir diferentes escenarios (Fominaya 2004). Para solucionar este problema se simula retardos en el receptor para procesar los datos recibidos, que se necesita para el desarrollo del sistema.
Sincronización Tx / Rx
Para realizar el análisis de la señal fue necesario establecer un punto de referencia para transmisión, y a partir de este punto con los datos procesados del receptor, detectar uno o más objetivos. Por lo tanto, es necesario que el transmisor y el receptor de la tarjeta USRP B210 se encuentren sincronizados.
Uno de los problemas que la tarjeta USRP B210 presenta es la inestabilidad en la sincronización entre transmisor y receptor al momento de usar la tarjeta como transceptor, ya que el transmisor se activa en tiempos diferentes al receptor sea antes o después y no se puede obtener un punto de referencia para calibrar la tarjeta.
Ante los problemas de sincronización de la tarjeta, el fabricante ha incluido una solución, se trata de un puerto de entrada en la tarjeta para GPSDO, que es un GPS controlado por un oscilador de cristal que permite crear sistemas útiles para aplicaciones que requieren de una mejor precisión en frecuencia y tiempo (Ettus 2017).
IV Diseño del Algoritmo
Para el desarrollo del algoritmo, se partió en base al análisis de las limitaciones de la tarjeta y principalmente del estudio de la velocidad máxima de transmisión de la tarjeta, donde se determinó que el ancho de banda con el cual la tarjeta puede trabajar es de B = 25 MHz, el cual entrega como resultado una resolución ∆R = 6 m.
El objetivo del algoritmo es optimizar la resolución de la tarjeta de ∆R = 6 m a un valor menor, por lo que fue necesario realizar n mediciones, para generar n señales cada una con un diferente ancho de banda, B n , que varía en m MHz con respecto a B n-1 , que corresponde a una diferente resolución ∆R > 6 m. En cada una de las mediciones se aplicó la teoría clásica del funcionamiento básico de un sistema radar (Zozaya 2015).
En la Fig. 6, se puede observar el contexto de la detección de un objeto ubicado a una distancia d. Como cada ancho de banda B n de cada medición provoca una nueva resolución ∆R n , el resultado de distancia arrojado por el sistema es de R n en cada uno de los casos, todas estas mediciones fueron almacenadas en una matriz. En la columna 2 de la matriz se almacenaron todos los resultados dados por software para la detección del objetivo (distancia R n ) y en la columna 1 se restó la resolución correspondiente del objetivo detectado de la columna 2 (R n - ∆R n ).
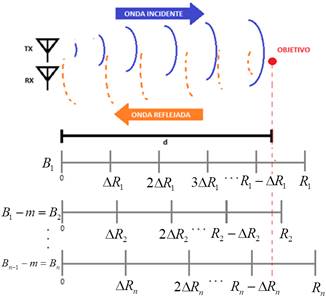
De los valores almacenados en la matriz se encontró el valor mayor de la columna 1 y el menor valor de la columna 2, promediándose estos valores para obtener el resultado de optimización de resolución. El proceso del algoritmo se detalla en el diagrama de flujo de la Fig. 7.
Determinación de zonas para mediciones y valores
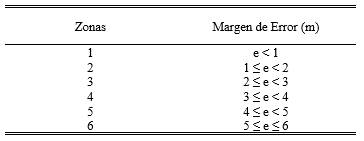
Dado que el objetivo es optimizar la resolución de la tarjeta USRP B210, se tomó en cuenta que el mayor error de medición fue 6 metros, y se fijaron diferentes zonas posibles, limitadas por un margen de error, e, las cuales representan la diferencia entre la distancia real del objetivo y la distancia arrojada por el sistema, dichos valores se encuentran dentro las zonas mostradas en la Tabla 3.
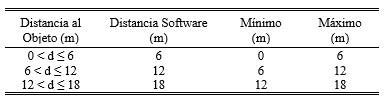
Cuando se detectó un objetivo según el valor de la resolución del sistema, entregó como respuesta de detección de objetivo un valor múltiplo de la resolución. Por ejemplo, en la Tabla 4 se muestra los valores mínimo/máximo (Columna 1 y Columna 2, respectivamente) que se obtendría al realizar la detección al utilizar el máximo ancho de banda, es decir, una resolución de ∆R = 6 m. Además, se indica los posibles rangos de ubicación del objetivo correspondientes a la resolución de la tarjeta USRP B210 sin optimización.
Proceso para calcular el número de muestras tomadas
Se analizó el procedimiento para encontrar los valores de las incógnitas m y n mencionadas anteriormente, que se determinó en el método para optimizar la resolución de la tarjeta USRP B210. Para el análisis se realizó la simulación de 100 mediciones distintas de un objetivo ubicado desde 1 a 100 metros de distancia de la antena. Se simularon diversos escenarios en los cuales se modificó la distancia real del objetivo, d, la cantidad de mediciones, n, y la variación del ancho de banda, m, en cada una, para encontrar el valor de las incógnitas m y n en un punto que permita mayor precisión de medida del objetivo. Los valores de m están dados en MHz y n en número de mediciones.
El proceso realizado para determinar los valores de las incógnitas m y n se lo hizo en base a la estimación de detectar una mayor cantidad de objetivos dentro de la zona 1, es decir, con un margen de error inferior a 1 metro. Para esto se realizó la aplicación del algoritmo de la Fig. 7 en mediciones con diferentes variaciones de ancho de banda, las cuales fueron desde 0.1 MHz a 2 MHz de 2 a 20 mediciones para cada variación de ancho de banda. La Fig. 8 muestra el resultado de las mediciones en donde se representa el mayor número de objetivos detectados en la zona 1 para cada uno de los valores de m, eligiéndose el valor de m que brinda mayor detección de objetos en la zona 1, en este caso m = 0.5 MHz, que representa un mayor número de objetivos encontrados con menor margen de error.
Una vez encontrado el valor de m se hizo un análisis para encontrar el valor de n al considerar que la cantidad de mediciones a partir de un cierto valor provoca la misma cantidad de objetos detectados en la zona 1, por lo tanto se continúa con los siguientes valores de n para determinar en este caso la mínima cantidad de objetos detectados en las zonas de mayor margen de error. El resultado se muestra en la Fig. 9.
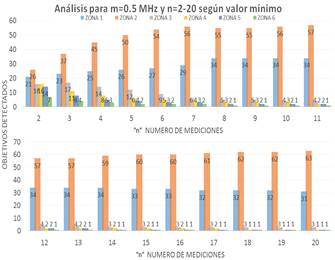
Una vez analizados los datos se determinó, por un lado, que a partir de n = 11, se obtiene la mayor cantidad de objetos detectados en la zona 1. Por otro lado, al analizar según la menor cantidad de objetos detectados en las zonas de mayor margen de error se obtiene que para n = 14 se detectó únicamente un objetivo en la zona 5 como se observa en la Fig. 9.
Al relacionar el análisis anterior la optimización del algoritmo se obtuvo a n = 14 mediciones con m = 0.5 MHz, según los valores mínimo/máximo de objetivos detectados.
Corrección de la Resolución
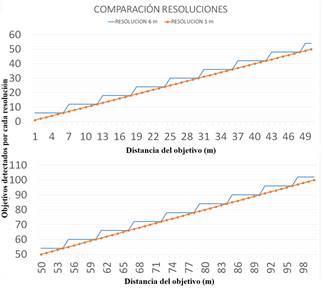
Una comparación de la diferencia que existe entre una resolución de 6 m en relación a una resolución de 1 m se la ha representado en la Fig. 10, en donde la resolución de 1 metro tiende a una función lineal de pendiente unitaria.
Posteriormente con los valores encontrados de n y m en la elección de número de muestras y variación de ancho de banda se aplicó al algoritmo.
En la Fig. 11 se observan cuatro líneas; la línea azul es la resolución inicial del sistema ∆R = 6 m, la línea roja es una referencia de una resolución de ∆R = 1 m que se la gráfica para poder estimar resultados, la línea gris y amarilla son los valores mínimo y máximo, respectivamente, corregidos de acuerdo a cada punto, por el contrario el área de color celeste es toda la corrección de resolución realizada con el algoritmo.

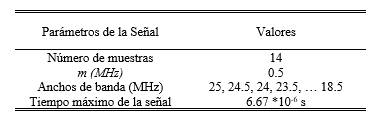
Los parámetros para generar la señal chirp y optimizar la resolución se citan en la Tabla 5.
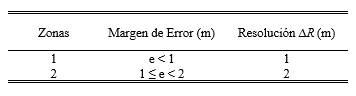
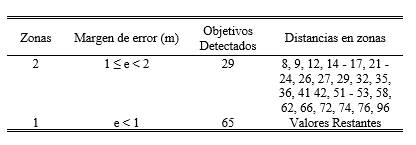
Una vez obtenidos los valores mínimos y máximos de cada objetivo detectado se computó un promedio para imprimir el resultado de ubicación de cada objetivo, como resultado se obtuvo un margen de error e < 2. Para interpretar de mejor manera los resultados se determinaron dos zonas de optimización de resolución como se muestra en la Tabla 6, y la resolución dependiendo de cada zona.
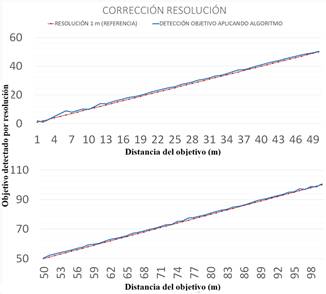
La Fig. 12 muestra los resultados obtenidos con el promedio obtenido entre el valor mínimo y máximo de cada objetivo.
Limitaciones del Algoritmo
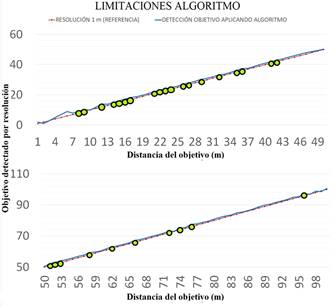
Para el análisis final se redujo el número de objetivos de 100 a 94 ya que se restaron los valores de las primeras seis medidas debido a que con estas medidas no es posible mejorar la resolución al encontrarse dentro del primer rango máximo de resolución sin optimización. El análisis siguiente se realizó con el nuevo número de muestras.
En la Fig. 13 los objetivos detectados en la zona 2 se representan en color verde y los objetivos restantes (representados sin color) están en la zona 1.
En la Tabla 7 se muestra en resumen el desempeño del algoritmo desarrollado en MATLAB®.
V Resultados
Para evaluar los resultados, el sistema SDRadar propuesto consta con las siguientes etapas como se muestra en la Fig. 14.
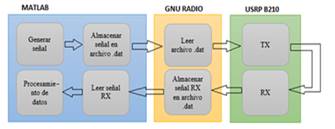
El sistema propuesto se lo realizó con la ayuda de MATLAB® para generar la señal y procesar los datos recibidos de las etapas realizadas con GNU RADIO y USRP para poder estimar la distancia del objetivo. Se propuso este sistema para reducir la carga computacional que requiere implementar un sistema SDRadar.
Evaluación Zona 1
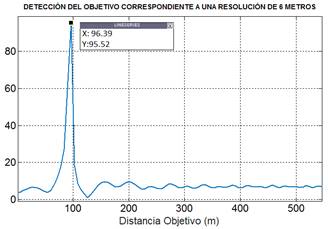
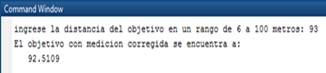
Se simuló en MATLAB® la distancia de 93 metros del objetivo a encontrar como se muestra en la Fig. 15. Al tomar en cuenta que la distancia simulada no es múltiplo de la resolución de la tarjeta ∆R = 6 m, por lo tanto sin aplicar el algoritmo la detección del objetivo tuvo un error en su medida.
La Fig. 16 muestra el radargrama con la posición del objetivo de acuerdo a la resolución de 6 m. El resultado al aplicar el algoritmo desarrollado para optimizar la resolución de la tarjeta USRP B210, con un error de detección e < 1 m, se muestra en la Fig. 17.

Evaluación Zona 2
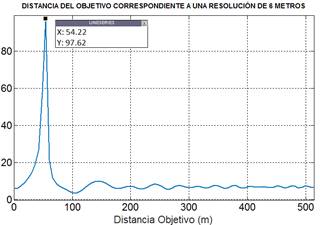
Se simuló en MATLAB® la distancia de 51 metros del objetivo a encontrar como se muestra en la Fig. 18. Al tomar en cuenta que la distancia simulada no es múltiplo de la resolución de la tarjeta ∆R = 6 m, por lo tanto sin aplicar el algoritmo la detección del objetivo tuvo un error en su medida. En la Fig. 19 se muestra el radargrama con la posición del objetivo de acuerdo a la resolución de 6m. Los resultados obtenidos, al aplicar el algoritmo desarrollado para optimizar la resolución, se muestra en la Fig. 20.
Discusión de Resultados
De las noventa y cuatro muestras evaluadas en las dos zonas determinadas, se obtuvieron 65 objetivos en la zona 1 con un error e < 1 m el cual representa un 69.15% de mediciones, así mismo se obtuvieron 29 objetivos en la zona 2 con un error de 1 m ≤ e < 2 m igual a 30.85% de mediciones con este error, como se muestra en la Tabla IX.
Conclusiones
Para optimizar la resolución de la tarjeta USRP B210 se desarrolló un algoritmo en MATLAB®, al considerar el mejor ancho de banda que proporciona la tarjeta, se determinó que con n = 14 mediciones sobre el objetivo a detectar con una diferencia entre anchos de banda m = 0.5 MHz de las señales generadas el resultado de optimización fue semejante a una resolución de 2 metros. El algoritmo desarrollado en MATLAB® optimizó la resolución a partir de 6 metros de distancia del objetivo a detectar, con una muestra de 94 compuesta por objetivos simulados situados de 6 a 100 metros de distancia donde se determinaron dos zonas: la primera que estuvo limitada por un error de medición de e < 1 m, la segunda zona con un error de medición 1 m ≤ e < 2 m con 69.15% y 30.85% de objetivos detectados respectivamente, lo que determinó su efectividad y confiabilidad. Para reducir la carga computacional que un sistema SDRadar comprende, se utilizó MATLAB® y GNURadio para generar la señal además de procesar los datos obtenidos de la tarjeta USRP B210 que fue usada como transceptor, donde se concluyó que por el número de mediciones que se deben realizar el algoritmo desarrollado puede ser empleado en aplicaciones SDRadar como detección de objetivos, aplicaciones topográficas o en radares de apertura sintética.

