











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroducción
El Ecuador a pesar de ser un país eminentemente agrícola y exportador de materia prima, realiza las actividades agrícolas aún de forma rudimentaria, sin que existan estudios profundos de las necesidades agrícolas y desarrollos de soluciones que aporten al mejoramiento de la calidad de vida de los campesinos mediante el desarrollo de maquinaria adecuada. Los países industrializados desarrollan equipamiento y maquinaria basados en sus propias necesidades o en intereses comerciales, dejando un vacío en el estudio de problemas que aquejan a sociedades como la nuestra, pero cuya condición es a la vez, una oportunidad de desarrollo de tecnología propia.
Según la Organización de las Naciones Unidas para la Alimentación y la Agricultura (FAO), la operación de desgrane consiste en separar los granos de la parte de la planta que los sustenta (Wiselyn, 2011). Esta separación, efectuada manualmente o con ayuda de una máquina, se consigue batiendo, frotando o sacudiendo los productos con mayor o menor dificultad, dependiendo de las variedades cultivadas, del contenido de humedad y del grado de madurez de los granos (FAO, 2016).
Operaciones de desgrane
Las operaciones de desgrane se realizan después de la recolección y, del presecado de los productos. Según la influencia de los factores agronómicos, económicos y sociales, se procede al desgrane de diferentes maneras:
Desgrane a mano, con ayuda de un instrumental sencillo;
Desgrane mecánico, con ayuda de máquinas sencillas accionadas manualmente;
Desgrane mecánico, con ayuda de máquinas de motor.
Desgrane manual de maíz
Desgranado a mano: El sistema tradicional más sencillo de desgrane consiste en ejercer una presión con los pulgares sobre los granos para conseguir que se desprendan del carozo. Otro método de desgrane frecuente consiste en frotar dos mazorcas una contra otra (FAO, 2016)
Ventaja: Causa poco daño al grano y permite eliminar granos dañados o infectados por insectos
Desventaja: Proceso lento (2q/día) y de uso intensivo de mano de obra.
Desgranado en saco: las mazorcas se meten en sacos y se golpea con palos.
Ventaja: Método más rápido que el proceso a mano.
Desventaja: Ocasiona mucho grano y semilla quebrada.
Desgranadora manual de madera: desarrollada por Tropical Produsts Institute (Leonard, 1982) y consiste en empujar rotando con una mano de tal manera que avance por el orifico con cuatro salientes, de una tabla sostenida con la otra.
Ventajas: Bajo costo y fácil manejo. (80 libras por hora).
Desventaja: Los bordes de la madera se desgastan con rapidez.
Se calcula que con ayuda de estos instrumentos un operario puede llegar a desgranar de 8 a 15 kg de maíz por hora (FAO, 2016).
Desgrane del maíz con máquinas accionadas manualmente
Los desgranadores manuales, permiten un desgrane más fácil y más rápido de las mazorcas.
Existen varios modelos de estas desgranadoras; generalmente son accionadas mediante una manivela o un dispositivo de pedal. Las operaciones de desgrane mediante desgranadores manuales requieren en general un solo operario (FAO, 2016).
Ventajas: Desgrana alrededor de un quintal por hora, son de larga duración y fácil manejo.
Desventaja: No se encuentra fácilmente en el mercado.
Desgrane con máquinas de motor
Aun cuando son sustituidas paulatinamente por las cosechadoras, estas máquinas ocupan todavía un lugar importante en los procesos productivos poscosecha, sobre todo gracias a su versatilidad. La simple sustitución de algunos accesorios y unos ajustes adecuados permiten a estas máquinas tratar diferentes categorías de granos (arroz, maíz, frijoles, girasol, etc.) (FAO, 2016).
Provistas de un tambor giratorio (con palas) y de un elemento fijo contra el cual se frota el grano, estas máquinas están equipadas con dispositivos de sacudida, de limpieza y de ensacado del grano. La desgranadora de motor puede requerir la intervención de dos o tres operarios.
La separación del grano de la tuza, generalmente constituye una etapa de las máquinas cosechadoras las cuales cuentan con rodillos guías que como su nombre lo indican solo guían las mazorcas hasta los rodillos desgranadores. La geometría y estado de movimiento relativo de los rodillos desgranadores son las dos condiciones necesarias para que se concrete la separación del grano de la mazorca. La Arrancadora desgranadora (cosechadora específica de maíz) se diferencia de las cosechadoras de cereales en el cilindro desgranador y el cónico, situados en posición longitudinal en la máquina, el cilindro tiene barras helicoidales provistas de aristas vivas o bien de dientes radiales dispuestos igualmente en hélice (Valero, 2000).
El principal problema que debe resolver el mecanismo que realice el desgranado del maíz es la diferencia del diámetro a lo largo de la longitud por su forma cónica, así como la diferencia de diámetro de las mazorcas dentro de la misma variedad del maíz suave seco en la región Sierra en las provincias de Bolívar Cotopaxi Azuay según la Agenda Zonal Zona 3.
El Instituto Ecuatoriano de Normalización clasifica al choclo por su tamaño en la Norma Técnica Ecuatoriana (INEN, 1991), como se resume en la Tabla 1.
Tabla 1 Clasificación del choclo por su tamaño
| Tipo (Tamaño) | Diámetro ecuatorial (cm) | Longitud (cm) |
|---|---|---|
| I (grande) | ≤ 7.0 | ≥ 20.1 |
| II (mediano) | 4-6.9 | 10-20 |
| III (pequeño) | ≥ 3.9 | ≤ 9.9 |
Incorporar a este mecanismo el dispositivo que resuelva estas diferencias geométricas constituye uno de los retos de este diseño, máquinas como la Penagos DM 2 implementa un “sistema presiona tuza” con un resorte helicoidal que permite ajustar la entrada del sistema de alimentación, al tamaño de la mazorca (Penagos, 2015).
Los rendimientos dependen del tipo de máquina, de la naturaleza y del grado de madurez de los granos, de la habilidad de los operarios y organización del trabajo, y pueden oscilar entre 100 y 5000 kg/h.
La humedad del grano seco blando debe ser del 12 % para que los granos no queden adheridos a las tuzas (Agenda Zonal 3, 2015).
1.4.1 Sistemas de desgrane
Dada la relevancia que tiene el sistema de desgrane del cual depende la calidad del maíz después de desgranado obliga estudiar los ya utilizados en procesos eficientes (Desgrana-Matic s.f).
Desgranador con dientes de espiga
Logra desprender el grano de la tuza por impacto y fricción, efectos producidos por la velocidad del cilindro y la separación existente entre el cilindro y el cóncavo de entrada y salida; la fricción es inversamente proporcional a la distancia entre el cilindro y el cóncavo (Figura 1).
Desgranador de platinas helicoidales
Realiza un desgranado similar al anterior, solo que las espigas son remplazadas por platinas dispuestas en forma helicoidal, cuenta con un tambor estático con agujeros y una parrilla con barras paralelas. Mediante fricción de la mazorca con el tambor estático se da el desgrane, el impacto es muy bajo. La fricción es inversamente proporcional a la distancia existente entre el tambor dinámico y el estático.
Desgranador Bar Escofina (cilindro desgranador dentado)
Es una bombardera abierta de tambor con cuatro frentes, bastidor opuesto en la posición opuesta, marcos de hierro fundido en el eje. Cada barra escofina se adjunta con 175 dientes de metal. La parte cóncava que se encuentra bajo el bombardeo del tambor es de chapa de acero curvada con agujeros perforados elípticos. La separación de la mazorca y del grano quebrado se produce es ocasionada por los flujos mixtos de material en el tamiz de agitación en el cóncavo, con el fin de separar los desechos se hace pasar el grano por el tamiz de peldaño y aquellos son tomados por el aspirador. La tasa de flujo de aire es ajustada por dos aberturas a los lados del ventilador.
Desgranador dientes de clavija
Desgranadora dientes de clavija. Cinco filas de clavijas están soldadas en el bombardeo superficie del tambor. Dos filas con 6 dientes, el resto tiene 7 dientes, hay un diente largo de cada fila. Disposición de los dientes fijos detrás de los que ya están en paralelo al eje. Las demás partes y el rendimiento de desgranadora dientes son similares a la desgranadora Raps bar pero la desgranadora de diente tiene mayor eficiencia de escofina desgranadora (Figura 4).
Máquinas desgranadoras en el Ecuador
Un alto porcentaje de maíz producido en el Ecuador es cosechado en forma manual, tal es el caso del maíz que se produce en la Sierra (1 vez al año). El ciclo básico empleado por los recolectores de maíz en la región Andina, consiste en: sujetar la mazorca y deshojar la misma desde la cresta hacia la base, una vez deshojado se toma entre los dedos índice y pulgar, y con el pulgar de la otra mano se desgrana, en lo cual el recolector emplea un 80% del tiempo total utilizado en el ciclo de recolección.
Dados estos análisis se han desarrollado investigaciones que buscan mejorar la eficiencia de la recolección, incrementando la productividad y tiempo invertido en esta actividad.
Estudiantes de la Universidad de las Fuerzas Armadas, desarrollaron en el año 2015 un dispositivo de accionamiento mecánico a base de fuerza centrífuga, con el cual se incrementó el rendimiento en un 40% con relación a la cosecha tradicional; sin embargo, se presentaba un alto porcentaje de maíz roto superando el 30% del total que era muy elevado con respecto al desgranamiento manual.
En un estudio del año 2016 en la misma universidad se diseñó y construyó un dispositivo para mejorar las prácticas de cosecha manual, utilizando cuatro rodillos cónicos de caucho que son impulsados por 4 motores AC de ¼ HP, para desprender todos los granos de una mazorca por medio de fricción en aproximada 6 segundos en promedio. Con esta herramienta se logró desprender los granos con alta eficiencia, con un rendimiento de hasta 40 Kg/h, y un porcentaje menor al 3% de maíces rotos.
La necesidad de proveer al pequeño agricultor de un equipo de bajo costo, accesible a su poder adquisitivo que sea de fácil manejo, operación sencilla y dimensiones adecuadas al espacio físico del que disponen, es el problema a resolver que se propone esta investigación.
Este prototipo portátil ha sido desarrollado mediante la utilización de materiales al alcance de todas las personas; ayuda a mejorar los procesos de cosecha en la región andina, y cumple con todos los estándares exigidos para dicha actividad.
Metodología
Para desarrollar el equipo se siguió la metodología de desarrollo de productos como proceso genérico (Ulrich K, Eppinger S, 2013) que propone los pasos siguientes:
Identificación de la oportunidad
Desarrollo de conceptos
Diseño a nivel sistema
Diseño de detalle
Pruebas y refinamiento
La metodología propuesta garantiza que el desarrollo tenga un mínimo riesgo de fracaso técnico y de mercado pues aborda el estudio de las necesidades para la concepción de las especificaciones y el desarrollo. En la etapa de desarrollo de conceptos, la metodología sugiere que se propongan una serie de alternativas previo a la selección de la mejor de ellas, que las mismas tengan una retroalimentación de los usuarios con la finalidad de refinar las especificaciones previo al desarrollo del prototipo final. Durante todo el desarrollo se realizan estudios de sistemas similares, análisis comparativos de costos y desarrollo de prototipos enfocados que demuestren la utilidad de las propuestas como paso previo al ensamble del prototipo final.
A base de los estudios de los equipos existentes en el mercado en aplicaciones similares, a los análisis de costos de maquinaria desarrollada de manera estándar y personalizada y de las pruebas realizadas para determinar la efectividad de los mecanismos y materiales propuestos, se desarrolló el sistema de desgrane que presenta innovaciones en la parte técnica, económica y de utilización.
3. Resultados
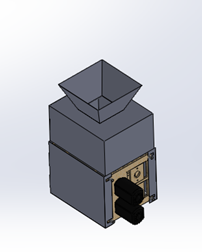
En la Figura 1 se muestra el concepto desarrollado para la aplicación. El equipo está compuesto por cinco sistemas funcionales de operación, estos son:
Sistema de alimentación
Sistema de guiado
Sistema de desgrane
Sistema de soporte
Sistema de separación
Sistema eléctrico
Sistema de control
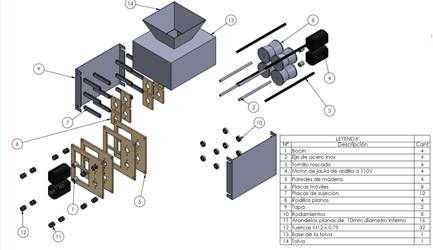
Los sistemas son de tipo modular de ranura (Ulrich K, Eppinger S, 2013) por lo que pueden acoplarse o desacoplarse fácilmente.
El equipo trabaja por la acción de 4 rodillos de tipo doble cono que cuentan con un sistema de potencia independiente para cada uno de ellos.
Sistema de Alimentación
El sistema de guiado consiste en una tolva de alimentación a manera de pirámide truncada invertida, la misma que debido a su forma y dimensiones y modo de acoplamiento permite el ingreso del material al sistema de guiado y desgrane.
La pirámide es de acero A 36 de 1 mm de espesor y de (200 x 200 mm) en la base y de (110 x 110 mm.) en el cono truncado. Estas dimensiones permiten que la mazorca pueda soltarse en la tolva y se dirija verticalmente de forma directa hacia los rodillos. La dimensión del cono truncado es de fundamental importancia para que el producto a procesar se guíe hacia los rodillos. En pruebas realizadas con dimensiones distintas a las expuestas, se comprobó que la mazorca no encajaba en el espacio entre conos para ser guiado y procesado.
Sistema de guiado
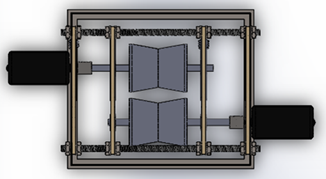
En la Figura 2 se observa la disposición de los rodillos de trabajo. Esta disposición es la innovación que presenta el trabajo desarrollado, pues la forma, materiales y disposición de los rodillos, permiten que este único trozo físico que corresponde al conjunto de los rodillos y motores, realice las funciones de guía y proceso; se elimina con ello la necesidad de un sistema de corte que poseen los equipos comerciales, lo cual permite que el equipo sea compacto, por tanto de bajo peso y de menor costo debido a la menor cantidad de materiales y sistemas de potencia que emplea.
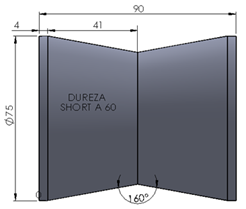
Los rodillos son de caucho vulcanizado de dureza shore A 60, tienen la forma y dimensiones mostradas en la Figura 3. Estas dimensiones y ángulo del doble cono, permiten la fricción de todo el perímetro del rodillo con la mazorca.
Cada uno de los rodillos tiene su propio sistema motriz compuesto por un motor AC de 600 RPM, 100 W de potencia, 1,5 A, 120 V, 50/60 HZ. Se colocó un motor por cada rodillo debido a que mediante este diseño el prototipo redujo su costo respecto a la opción de utilizar menos motores y un sistema de transmisión de potencia y velocidad.
En la Figura 2, se muestra la disposición de los rodillos en el momento de captación del producto.
Los rodillos que se observan, giran en sentidos opuestos, esto hace que la mazorca que llega impulsada por la fuerza de gravedad, sea captada por el primer par de rodillos, inmediatamente sea guiada al segundo par y que en este proceso de captación y guía, debido al rozamiento, deslizamiento y velocidad de los rotores, los granos se desprendan de la tuza.
Debido a que las dimensiones de las mazorcas son variadas (INEN, 1991), es necesario disponer de un mecanismo que permita el guiado y paso de las mismas al sistema de desgrane. Para conseguir este objetivo, se desarrolló un sistema de guías del conjunto rodillo - eje - motor, para un lado del mecanismo de desgrane. En el otro lado los 2 pares de rodillos permanecen estáticos.
El sistema de guiado consiste en una placa a la que se acopla un rodamiento que soporta el eje del rodillo y esta placa se mueve a lo largo de una guía. Un resorte permite la apertura y cierre de las placas de soporte. En la Figura 4 se muestra el funcionamiento del sistema.

La constante del resorte utilizado es de 55 N/m. En caso de resortes con constantes de menor valor, el sistema no lograba desprender los granos debido a que la fricción es directamente proporcional a la constante del resorte debido a la fuerza que ejerce el rodillo sobre el producto. En el caso de constantes de valores mayores al expuesto, las mazorcas no logran vencer la fuerza del resorte y provocan un atascamiento y/o la rotura de granos.
Debido a la característica del producto procesado y al grado de secado del mismo, se hace posible que todos los granos se desprendan de la mazorca.
Sistema de desgrane
El sistema de desgrane está compuesto por el conjunto de rodillos que no solo funcionan como guías, sino que además cumplen la función de elementos deshojadores. Los factores de mayor importancia en el proceso de desgranado de este sistema son: La velocidad de rotación de los rodillos, la distancia fija entre rodillos y el ángulo del doble cono. La velocidad de rotación para desarrollar el proceso de manera efectiva es de 500 RPM, la distancia entre los ejes de los rodillos es de 80 mm y el diámetro mayor de los mismos es de 75 mm.
La fricción generada entre el caucho y los granos, provoca el desprendimiento de los mismos; el primer par de rodillos atrapa la mazorca, la desgrana en un 50% y por acción de la fuerza de rozamiento más la gravedad, pasa al siguiente par de rodillos que son los que terminan el proceso.
Sistema de soporte
El sistema de soporte fue desarrollado pensando en una doble función del mismo, es decir sujeción de los elementos físicos que desarrollan las funciones de alimentación, guía y desgrane y a la vez la integración de un sistema de separación de los granos de la tuza.
El sistema de soporte fue desarrollado con perfil angular de acero A36, que igualmente tiene una estructura modular que permite la separación del resto de sistemas del equipo.
Sistema de separación
El sistema de separación que se encuentra adaptado a la estructura de soporte consiste en una malla de alambre de 1 x 1 pulgadas (un orificio por pulgada) que permite el paso del grano e impide el paso de la tuza.
Sistema eléctrico
El sistema eléctrico hace referencia a los componentes que permitirán a los motores AC, realizar los movimientos rotacionales que efectuaran la función de separación del grano de maíz de la tuza, así como el desplazamiento del mismo a través de los cilindros, este circuito eléctrico permitirá regular la velocidad de rotación de los motores dependiendo del tipo de maíz a desgranar, para este control se ha realizado un circuito con un potenciómetro que controla el paso de corriente a través de la variación de resistencia regulando así la fuerza necesaria para el desgranado de maíz.
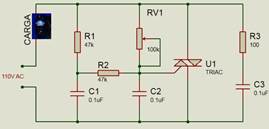
En la Figura 5, se muestra el circuito electrónico que nos permite controlar la velocidad del motor, este cuenta con un potenciómetro, el cual se encuentra denotado por R3, como se puede observar en la Figura 6; además está compuesto por un tiristor TRIAC y un DIAC que tiene por función asistir al TRIAC los cuales junto con el potenciómetro permite controlar la corriente.
La etapa final del circuito cuenta con capacitores cerámicos que tienen la función de filtrar el ruido producido por los sobre picos de corriente/voltaje.
Sistema de control
El sistema de control que se propone para esta máquina controlar el paro de la máquina cuando en esta exista un tipo de problema como es el atascamiento de una mazorca de maíz, lo cual se podrá controlar con la utilización de un sensor de corriente, una tarjeta de control de software y hardware libre permitiendo de esta manera que el sistema sea autónomo en cuanto a riesgos eléctricos que podrían afectar a la máquina; para ello se realizan modificaciones de ámbito electrónico lo cual será añadido a las sistemas mecánicos y eléctricos.
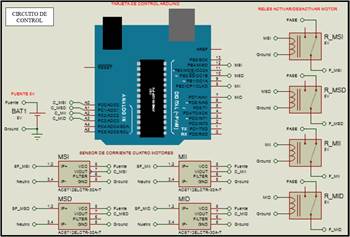
El circuito de control propuesto consta de cuatro sensores de corriente ACS712ELCTR - 30A-T, las salidas analógicas de los sensores estarán conectados a las entradas analógicas de la tarjeta de control (ARDUINO); por las cuales se pretende medir la corriente de los motores, permitiendo de esta manera detectar cuando el motor está consumiendo mayor corriente de la normal; y también consta de cuatro relés de voltaje de activación de la bobina de 5V, con capacidad 10A y 120V AC. Estos relés estarán conectados en un circuito normalmente cerrado, lo cual permite que los actuadores trabajen de forma normal y permite también la desactivación de los motores por medio de la tarjeta de control cuando en los rangos de corriente superen a los establecidos; este incremento de consumo de corriente por uno de los cuatro motores o en su defecto los cuatro motores se han detenido por atascamiento de una mazorca de maíz entre los rodillos de desgrane explicando el incremento significativo de corriente por los motores
El sensor ACS712ELCTR-30A-T, trabaja en un rango de -30A a 30ª, con una sensibilidad de 66mV. De este sensor se obtiene un valor de 2,5V cuando la corriente por el actuador es de 0A, incrementando de manera proporcional de acuerdo a la sensibilidad del sensor, se obtiene una relación lineal entre voltaje del sensor y la corriente; esta relación para el voltaje se describe en la ecuación 1.
 (1)
(1)
Siendo:
V: voltaje del sensor
m: la sensibilidad del sensor
I: corriente
La relación para la corriente se describe en la ecuación 2.
 (2)
(2)
Las ecuaciones 1 y 2, permitirán realizar el código de control para la tarjeta Arduino.
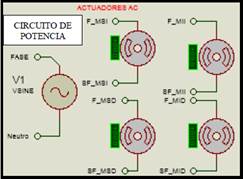
En el circuito de potencia de la Figura 7, se cuenta con los cuatro actuadores AC, los cuales realizarán el desprendimiento de los granos de maíz, estos actuadores regalan su velocidad de acuerdo a un potenciómetro uncido estratégicamente para variar sus revoluciones.
Terminología en los circuitos
R_MSI: relé motor superior izquierdo
R_MSD: relé motor superior derecho
R_MII: relé motor inferior izquierdo
R_MID: relé motor inferior derecho
FASE: Línea de tensión alterna para alimentación de los actuadores
F_MSI: continuación del circuito normalmente cerrado para el motor superior izquierdo
F_MSD: continuación del circuito normalmente cerrado para el motor superior derecho
F_MII: continuación del circuito normalmente cerrado para el motor inferior izquierdo
F_MID: continuación del circuito normalmente cerrado para el motor superior derecho
MSI: activación de la bobina del motor superior izquierdo
MSD: activación de la bobina del motor superior derecho
MII: activación de la bobina del motor inferior izquierdo
MID: activación de la bobina del motor inferior derecho
Ground: tierra del circuito de control
C_MSI: corriente del motor superior izquierdo
C_MSD: corriente del motor superior derecho
C_MII: corriente del motor inferior izquierdo
C_MID: corriente del motor inferior derecho
SF_MSI: salida de la fase del motor superior izquierdo
SF_MSD: salida de la fase del motor superior derecho
SF_MII: salida de la fase del motor inferior izquierdo
SF_MID: salida de la fase del motor inferior derecho
Fuente: alimentación de los sensores a 5V
Neutro: punto común entre los actuadores de corriente alterna
Como resultado de las pruebas realizadas al equipo con una muestra de 50 mazorcas de maíz se obtuvo como resultado un 100% de mazorcas desgranadas y aproximadamente 0,2% de porcentaje de granos rotos.
Los dos parámetros anteriores fueron motivo de experimentación debido a que dentro de las especificaciones objetivo, las de mayor importancia para los potenciales usuarios de los equipos eran los mencionados.
5.- Conclusiones y Recomendaciones
Se logró el objetivo de desarrollar un equipo que cumple con los requerimientos de los campesinos de la sierra ecuatoriana en cuanto a requerimientos de trabajo para una especie local de maíz, en un proceso para el cual comercialmente no existe equipamiento alguno.
Mediante la adición de otro grupo de cuatro rodillos, que compartan el mismo sistema de potencia, se podría incrementar en futuros desarrollos la capacidad de trabajo del equipo.
La efectividad y determinación de los parámetros de trabajo del equipo, especialmente velocidad de rotación de los rodillos, que se consideró la de mayor significancia en las pruebas, depende directamente del grado de humedad que tenga el producto a procesar.
El equipo desarrollado es de fácil construcción razón por la cual podría reproducirse por aquellos productores que lo requieran.

