











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
1. INTRODUCCIÓN
Los sistemas dinámicos en dimensión infinita abarcan aquellos que en algún sentido son disipativos, por ejemplo, los semigrupos que admiten un atractor global: «un compacto invariante que atrae a todos los conjuntos acotados» (Raugel, 2002; Hale, 2004). En Rybakowski (1987), se exponen dos conceptos útiles en un compacto invariante: atractor local y descomposición de Morse. Ambas nociones fueron reexaminadas en Carvalho et al. (2013), pero en un atractor global. Con el objeto de comparar los resultados de Carvalho et al. (2013) con los de Rybakowski (1987) y así esclarecer el contexto, en el presente trabajo a las definiciones dadas en el libro de Rybakowski se les adiciona el adjetivo «débil» y se prueba su equivalencia cuando el compacto invariante es un atractor global. Las dos equivalencias están en la proposición 2.11 y el teorema 3.4, respectivamente. La tercera - aparece en el teorema 4.13 - es la equivalencia entre el semigrupo gradiente (los que poseen una función de Lyapunov) y el semigrupo dinámicamente gradiente (en el sentido de Carvalho et al. (2013)), tal como se prueba en Aragão et al. (2011). Se estudia finalmente la estabilidad de los semigrupos gradiente, por medio de algunos ejemplos que ilustran el teorema 5.3, demostrado en Carvalho et al. (2013).
1.1 Notaciones y definiciones previas
El dominio de las aplicaciones consideradas en este artículo es un espacio métrico (X,d), denotado por X. La topología se construye por medio de la distancia d: X × X → [0,+∞) y haciendo uso de la ε−vecindad abierta generada por cada ε > 0 en cualquier subconjunto A de X, la cual viene dada por
donde d(x,A)=´ınf{d(x,a): a∈A}. Específicamente, una familia T(·) = {T(t) : t ≥ 0} que está formada por funciones continuas de X en X es un semigrupo en X, si T(·) satisface las tres condiciones siguientes:
⋄ T(0) = I X , donde I X es la aplicación identidad en X.
⋄ T(s+t) = T(t)T(s) (composición), para todo t,s ∈ [0,+∞).
⋄ [0,+∞)×X ∋ (t,x) 7→ T(t)x ∈ X es continua.
La órbita positiva de un subconjunto E de X viene dada por
Con la órbita se estudia el comportamiento asintótico de E bajo la acción del semigrupo, por ejemplo, cuando la órbita positiva es el propio conjunto. Se utilizan concretamente los subconjuntos invariantes bajo T(·), es decir, los conjuntos A ⊂ X que cumplen
T(t)A = A, para todot ≥ 0.
Para relacionar las propiedades dinámicas de un conjunto invariante con otras órbitas, se introduce el concepto de atracción para lo cual es necesario comparar conjuntos. Esto se logra haciendo uso de la semidistancia de Hausdorff entre dos subconjuntos del espacio métrico, la cual viene dada por
De este modo, cuando
se dice que A atrae al conjunto B. Finalmente, al subconjunto A de X se le denomina atractor global para T(·) cuando:
Cabe mencionar que cada atractor global no solo es único, sino también está formado por todas las soluciones globales que son acotadas.
La exposición se organiza de la siguiente manera. En la sección 2 se definen los dos tipos de atractores locales y se describen las condiciones para obtener su equivalencia (proposición 2.11). En la sección 3 no solo se incluye el concepto de descomposición de Morse débil, sino también sus propiedades dinámicas. En este contexto, se usa la llamada familia invariante aislada para obtener el teorema 3.4, donde se establece la equivalencia del concepto de descomposición de Morse presentado por dos enfoques diferentes en los libros de Rybakowski (1987) y de Carvalho et al. (2013). En la sección 4, se introduce el concepto de semigrupo gradiente con respecto a una familia invariante aislada y se prueba que el semigrupo es dinámicamente gradiente con respecto a esa familia (proposición 4.8). Para la recíproca de esta afirmación se construye una función de Lyapunov generalizada, estableciéndose así la equivalencia entre los dos conceptos (teorema 4.13). En la sección 5, se presenta el teorema de estabilidad (teorema 5.3) como una aplicación de la teoría desarrollada en las secciones anteriores, mediante algunos ejemplos. Se concluye con el apéndice A, donde se describen las propiedades básicas de las soluciones maximales de una ecuación diferencial autónoma definida en un espacio de dimensión finita.
2. ATRACTORES EN UN COMPACTO INVARIANTE
El conjunto ω−límite, asociado a E es
Este conjunto cerrado no solo verifica la siguiente igualdad
invariante: T(t)ω(E) ⊂ ω(E),∀t ≥ 0. Además
Por ejemplo, para un compacto invariante A ⊂ X se cumple la igualdad ω(A) = A. El ω−límite del conjunto unitario E = {z} se denota por ω(z) y satisface

Cabe mencionar que si E ⊂ X es un conjunto no vacío, puede ocurrir que
Esto sucede, por ejemplo, en el siguiente sistema de ecuaciones diferenciales:
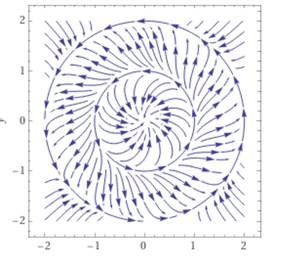
En el siguiente disco compacto D 1 = {(x,y) ∈ R 2: x 2 +y 2 ≤ 1}, se obtiene que T(t)D 1 = D 1 para todo t ≥ 0. Además
Observación 2.1. El sistema (2) es un caso especial del Ejemplo 6.3 y por tanto, definen adecuadamente un semigrupo. En coordenadas polares (r,θ) el sistema (2) induce naturalmente la siguiente ecuación diferencial:
En particular,
La desigualdad se preserva para 0 < r < 1, y en r = 1 y r = 2 aparecen dos ciclos límite.
2.1 Pareja atractor-repulsor
La siguiente definición aparece en el libro de Rybakowski y no presupone la existencia de un atractor global para el semigrupo. Para evitar cualquier equivocación se habla de una pareja atractor- repulsor dentro de un compacto invariante. Este concepto es complementario al llamado par atractor-repulsor en un atractor global (definición 2.9).
Definición 2.2. Sea SA un compacto invariante bajo T(·). El conjunto A ⊂ SA es un atractor local débil (en SA ) si existe una constante ε > 0 que satisface
El repulsor (relativo a SA ) asociado al atractor local débil A ⊂ SA es
Al par ordenado (A,A ∗) se le dice: pareja atractor-repulsor, respecto a SA .
Ejemplo 2.3. En el semigrupo inducido por (2) y descrito por la Figura 1 el conjunto SA = D
1 es un compacto, invariante bajo T(·). El conjunto A = D
1 es un atractor local débil pues satisface
En el estudio de las propiedades dinámicas de la pareja atractor- repulsor (A, A∗ ) en un compacto invariante SA (teorema 2.4), aparece el concepto de solución global. La solución global para el semigrupo T(·) es una función continua ξ: R → X que verifica
T(t)ξ(s) = ξ(t +s), ∀s ∈ R y ∀t ∈ [0,+∞).
Si x ∈ X admite una solución global ξ x con ξ x (0) = x se dice que la solución global ξ x pasa por x. Esta solución ξ x verifica ξ x (t) = T(t)x para todo t ≥ 0. Además, el conjunto α−límite es

En este contexto, por la continuidad del semigrupo se obtiene T(t)α(ξ x )⊂α(ξ x ),∀t ≥ 0. Análogamente, para cada elección del parámetro t ≥ 0, la regla de correspondencia s 7→ ξ x (t +s) define una solución global que pasa por T(t)x.
Teorema 2.4. Sea (A,A ∗) una pareja atractor-repulsor para T(·), respecto a SA , entonces
Los conjuntos A y A ∗ son disjuntos, compactos e invariantes.
Sea ξ x =ξ: R→SA la solución global que pasa por x∈SA ; las siguientes implicaciones son válidas:
Si
Si α(ξ)∩A ̸= ∅ entonces ξ(R) ⊂ A.
Si x ̸∈ A∪A ∗ , entonces A ∗ ⊃ α(ξ) y ω(x) ⊂ A.
Demostración. La prueba de este teorema aparece en el último capítulo del libro de Rybakowski (1987).
Corolario 2.5. Sean x ∈ SA y A el atractor local débil en SA .
Demostración. Se observa inicialmente que si x ∈ A, entonces por la propiedad (1) y la invarianza de A se obtiene directamente que el conjunto ω(x) está incluido en A. Si por el contrario
2.2 Pares en un atractor global
El atractor global de T(·) es el compacto invariante que atrae a cada subconjunto acotado de X. En otras palabras, el atractor global es un compacto invariante al cual confluyen todas las trayectorias, este hecho nos da la información de cómo evoluciona el sistema con el transcurrir del tiempo. Cabe recordar que el atractor global es único y se caracteriza con las soluciones globales ξ que son acotadas. Es decir, el atractor global A satisface
A = {ξ(0): ξ es una solución global acotada} .
A continuación, se presenta un resultado de existencia del atractor global en dimensión finita, tal como aparece en Gavilán (2019). Cabe mencionar que tal monografía no describe la estabilidad de las familias uniparamétricas de semigrupos en el sentido de la sección 5.
Proposición 2.6. Si X = R n y T(·) admite un subconjunto acotado B ⊂ R n que atrae a cada conjunto unitario de R n . Entonces B atrae a cada subconjunto compacto K ⊂ R n . En particular, B es atrayente, es decir:
Demostración. La condición «B atrae al conjunto A» es equivalente a decir para cada constante ε > 0, la vecindad O ε (B) absorbe al conjunto A. Simbólicamente esto significa:
Esto se obtiene directamente, puesto que la inclusión T(t)A ⊂ O ε (B) es equivalente a la desigualdad d H (T(t)A,B) ≤ ε. En este contexto, basta probar que para cada conjunto compacto K ⊂ R n se cumple:
ε > 0 ⇒ O ε (B) absorbe al conjunto K.
En efecto, si ε > 0, la condición limd H T R n t→+∞
implica que alguna vecindad abierta de x ∈ K es absorbida por O ε (B). Usando una cobertura finita del compacto K se infiere que O ε (B) absorbe K. Por (4), se obtiene que B atrae a cada compacto
K ⊂ R n .
El conjunto B es atrayente, pues para cada acotado C ⊂ R n su clausura C es un compacto que satisface no solo la inclusión T(t)C ⊂ T(t)C sino también
Esto concluye la demostración.
Ejemplo 2.7. La ecuación diferencial
x˙ = −x(x−η)(x+η), η es una constante
induce un semigrupo T(·) que admite un conjunto compacto e invariante que atrae a cada número real. Específicamente, a partir de la proposición 2.6, se obtiene que el intervalo A = [−η , η] es el atractor global.
Ejemplo 2.8. Considere el sistema de ecuaciones diferenciales dado en (2). Por la caracterización presentada en (3), se obtiene directamente que el disco
de la Figura 1, es un conjunto compacto e invariante bajo T(·) que atrae a cada conjunto unitario del plano R 2. En este contexto, la proposición 2.6 garantiza que el disco D 2 es el atractor global del sistema.
A continuación, se estudia la estructura del atractor global.
Definición 2.9. Sea T(·) un semigrupo que admite un atractor global A ⊂ X. Un subconjunto A ⊂ A es un atractor local del semigrupo si
ω(O ε (A)) = A, para algúnε > 0.
El repulsor A ∗ asociado al atractor local A es el conjunto definido por
El par (A,A ∗) es llamado par atractor-repulsor para T(·).
Ejemplo 2.10. A manera de ilustración se presentan algunos atractores locales que se construyen dentro del atractor global
A = D 2 (ejemplo 2.8). Específicamente, ellos son:

Así, cada uno de estos conjuntos cumplen ω(O ε (A j )) = A j para algún ε > 0 cuando 0 ≤ j ≤ 3. Sus respectivos repulsores asociados son:

donde int(D 1) significa el interior de D 1. Además se observa que
∅= A
0 ⊂ A
1 ⊂ A
2 ⊂ A
3 =A y  A .
A .
La siguiente proposición presenta las definiciones de atractor local de acuerdo a dos enfoques diferentes. El primero aparece en el libro de Rybakowski (1987) y el segundo se encuentra en el libro de Carvalho et al. (2013).
Proposición 2.11. Sea A un atractor global para T(·). Si A ⊂A es invariante, son equivalentes:
Existe ε > 0 tal que
Demostración. Si se acepta el ítem (b), basta observar que
A ⊂ O ε (A)∩A ⊂ O ε (A).
A partir de las propiedades del conjunto límite, que aparecen en
(1), se obtiene que
ω(A) ⊂ ω(O ε (A)∩A ) ⊂ ω(O ε (A)) = A
Por lo tanto, se cumple (a) pues A es invariante.
Para la demostración de la recíproca vea el libro de Carvalho et al. (2013).
Observación 2.12. Cuando en la proposición 2.11, se sustituye la condición A (atractor global) por SA (compacto e invariante) la equivalencia no necesariamente es válida.
Este hecho se muestra en el siguiente ejemplo:
Ejemplo 2.13. Sea SA = D
1. En el ejemplo 2.3 se observa que el conjunto A = D
1 cumple el ítem (a) de la proposición 2.11, sin embargo A = D
1 no satisface el ítem (b), pues
3. DESCOMPOSICIÓN DE MORSE
El estudio de la descomposición de Morse es una herramienta importante que permite entender la dinámica de un atractor global.
Definición 3.1. Sea SA ⊂ X, un conjunto compacto e invariante con respecto a T(·). Una colección ordenada {E 1,...,E n } de subconjuntos E j ⊂ SA es una descomposición de Morse débil de SA si existe un sucesión creciente
de atractores locales débiles, en SA para los cuales se cumple
Las propiedades básicas de una familia que satisface esta definición se describen en la siguiente proposición.
Proposición 3.2. Sea SA ⊂ X un compacto, invariante con respecto a T(·) y {E 1,...,E n } una descomposición de Morse de SA asociada a los atractores locales débiles, ∅= A 0 ⊂A 1 ⊂···⊂ A n −1 ⊂ A n = SA . Se satisfacen los siguientes enunciados.
Existe ε > 0 tal que
Si ξ x = ξ: R → SA es la solución global que pasa por x ∈ SA , entonces:
Cada A k está únicamente determinado por {E 1,...,E n }:
Si 1 ≤ i ≤ n,
Demostración. Referimos al libro de Rybakowski.
La siguiente proposición describe una caracterización de la existencia de una familia que satisface la definición 3.1.
Proposición 3.3. Sea SA ⊂ X un compacto, invariante con respecto a T(·). Si se asume que la familia ordenada {E 1,...,E n } satisface las tres condiciones:
Cada E k ⊂ SA es compacto e invariante.
Existe ε > 0 tal que
Si ξ = ξ x : R → SA es la solución global que pasa por x ∈ SA , entonces
Entonces {E 1,...,E n } es una descomposición de Morse de SA .
Demostración. La prueba está en el libro de Rybakowski.
3.1 Familia invariante aislada
Este concepto aparece en el artículo de Aragão et al. (2011) y es de gran utilidad para describir las propiedades de una descomposición de Morse, en un atractor global A (teorema 3.4). La familia {E 1,...,E n } es invariante aislada si existe δ > 0 tal que
y cada cerrado E i ⊂ A es el invariante maximal en O δ (E i ). En otras palabras, cada conjunto cerrado E i es invariante aislado. Específicamente, un conjunto cerrado e invariante E ⊂ X se denomina invariante aislado, si existe una constante ε > 0 tal que el conjunto inicial E es el invariante maximal en O ε (E), es decir, cualquier conjunto invariante B ⊂ O ε (E) satisface B ⊂ E. Por ejemplo, en un atractor global A
cada atractor local A ⊂ A y su respectivo repulsor son invariantes aislados.
El siguiente teorema demuestra la equivalencia del concepto de descomposición de Morse dados en los libros de Rybakowski (1987) y de Carvalho et al. (2013). Cabe mencionar que por la proposición 2.11 los pares atractor-repulsor en un atractor global heredan las propiedades topológicas de las parejas atractorrepulsor, por ejemplo la compacidad. En particular, se dan las condiciones para aplicar el teorema 2.4.
Teorema 3.4. Sea T(·) un semigrupo que admite un atractor global A . Son equivalentes:
El atractor global admite una descomposición de Morse débil. Es decir, existe una colección ordenada {E˜1,...,E˜ n } asociada a una familia de atractores locales débiles en A
∅ = A 0 ⊂ A 1 ⊂ ··· ⊂ A n−1 ⊂ A n = A
por medio de la relación
El atractor global admite una familia ordenada {E 1,...,E n } de cerrados que es invariante aislada, para la cual cada solución global ξ: R → A induce i, j con i ≥ j tal que
Demostración. (1 ⇒ 2): Se prueba inicialmente que la siguiente familia ordenada {E˜1,...,E˜
n
} es invariante aislada. Para obtener esta afirmación se observa que todos los conjuntos
• Existe la constante δ = m´ın{ε,δ
1,...,δ
n
} > 0 para la cual se cumple que E
˜
i
es invariante maximal en O
δ
(E
˜
i
). Además, si 1 ≤ i < j ≤ n, la intersección
Continuando con la prueba, se afirma que cada solución global ξ: R→A induce subíndices i, j con i≥ j de modo que α(ξ)⊂E˜ i y ω(ξ(0)) ⊂ E ˜ j . En este sentido, se da x = ξ(0) ∈A y se elige el subíndice i como el menor elemento del conjunto {1,...,n} para el cual el respectivo atractor local A i contiene a x, pero A i−1 no lo incluye. Es decir,
i = min{1,...,n: x ∈ A i , pero x ∈/ A i−1 }.
En este contexto, si x, la invarianza del conjunto cerrado E˜
i
garantiza que α(ξ)∪ω(x) ⊂ E
˜
i
y se concluye. Si por el contrario x es decir
Si
y
De este modo, se desprende que ω(x) ⊂ E ˜ i−2 o bien ω(x) ⊂ A i−3 . Continuando con este procedimiento inductivo, puede finalmente ocurrir que ω(x) ⊂ A 2, y así se desprende que ω(x) ⊂ E ˜ 2 o bien ω(x) ⊂ A 1 = E ˜ 1. Es decir, ω(x) ⊂ E ˜ j , para algún 1 ≤ j < i. Por lo tanto, se cumple (2) en el presente teorema.
(2 ⇒ 1): La familia ordenada de cerrados {E 1,...,E n } es invariante aislada, existe δ > 0 tal que O δ (E i ) ∩ O δ (E j ) = ∅ cuando 1 ≤ i < j ≤ n, y además cada cerrado E i ⊂ A es invariante maximal en O δ (E i ). La compacidad de A garantiza que cada E i es compacto. Con todo esto, (2) induce las condiciones de la proposición 3.3. Por lo tanto, la familia {E 1,...,E n } es una descomposición de Morse y se obtiene (1). Esto concluye la demostración.
Ejemplo 3.5. La descomposición de Morse S = {E 1,E 2,E 3} del atractor global A = D 2 se obtiene utilizando la relación
E j para todo 1 ≤ j ≤ 3, donde el par atractor-repulsor están dados en el ejemplo 2.10. Es decir,
Además, se observa que la familia ordenada S = {E 1,E 2,E 3} de cerrados es invariante aislada. Además, en la Figura 1, para cada solución global ξ: R → A se cumple
 (6)
(6)
4. SEMIGRUPO DINÁMICAMENTE GRADIENTE Y FUNCIÓN DE LYAPUNOV
En esta sección, se caracteriza al semigrupo gradiente usando el siguiente concepto de estructura homoclínica.
Definición 4.1. Sea T(·), un semigrupo y sea S = {E 1,...,E n }, una familia invariante aislada. Una estructura homoclínica en S es un subconjunto {E k1 ,...,E kp } de S (p ≤ n), asociado a soluciones globales {ξ 1,...,ξ p } para las cuales se cumple

donde E kp+1 = E k1 y cada ξ j admite un t j con ξ j (t j ) ̸∈ (E kj ∪ Ek j +1).
Ejemplo 4.2. De (6) se infiere que el sistema no tiene estructura homoclínica en la familia invariante aislada S .
A continuación, se presenta el concepto de semigrupo dinámicamente gradiente, de acuerdo con la presentación dada en el libro de Carvalho et al. (2013). Cabe mencionar que este concepto aparece inicialmente en el artículo de Aragão et al. (2011) con el nombre de semigrupo tipo-gradiente y en el artículo de Carvalho et al. (2007) se extiende al caso de los procesos de evolución.
Definición 4.3. Sea T(·), un semigrupo que admite un atractor global A y sea S = {E 1,...,E n }, una familia invariante aislada. Se dice que T(·) es dinámicamente gradiente, respecto a S si
⋄ Para cualquier solución global ξ: R → A existe 1 ≤ i, j ≤ n tal que
⋄ No existe una estructura homoclínica asociada a S .
Ejemplo 4.4. La ecuación diferencial x˙ = −x(x − 1)(x + 1), induce un semigrupo T(·) que tiene un atractor global A = [−1,1]. Sea S = {E 1,E 2,E 3} una familia invariante aislada, donde E 1 = {−1};E 2 = {1} y E 3 = {0}. Se observa que para cualquier solución global ξ: R → A se cumple

Por lo tanto, no existe estructura homoclínica en S y en consecuencia T(·) es dinámicamente gradiente respecto a S .
Ejemplo 4.5. De los resultados obtenidos en los ejemplos 3.5 y 4.2 se concluye que el semigrupo T(·) es dinámicamente gradiente con respecto a la familia invariante S = {E 1,E 2,E 3}.
4.1 Semigrupo gradiente
Definición 4.6. Sea T(·), un semigrupo que admite un atractor global A y sea S = {E 1,...,E n }, una familia invariante aislada. Se dice que T(·) es un semigrupo gradiente con respecto a S si existe una función continua V: X → R tal que:
⋄ La función [0,∞) ∋ t 7→ V(T(t)x) ∈ R es decreciente, para cada x ∈ X;
⋄ V es constante en E i , para cada 1 ≤ i ≤ n y
⋄ V(T(t)x) = V(x),∀t ≥ 0 si y sólo si x ∈ [ Ei=1
V es la función de Lyapunov generalizada de T(·), con respecto a S .
Ejemplo 4.7. La ecuación diferencial
x˙ = −x 3, x ∈ R,
genera un semigrupo T(·) cuyo atractor global es A = {0}. En este caso, S = {E 1} = {{0}} es invariante aislada y la función V: R → R, definida por V(y ) = y cumple
donde x(t) = T(t)x 0 es la solución que satisface x(0) = x 0. Claramente se verifica que t 7→ V(T(t)x 0) es decreciente. Además, V(x(t)) = V(x 0),∀t ≥ 0 implica que x(t) ∈ {0} = E 1. Por tanto, V es una función de Lyapunov y el semigrupo es gradiente con respecto a S .
Proposición 4.8. Si V: X → R es una función de Lyapunov generalizada de T(·), con respecto a la familia invariante aislada S = {E 1,...,E n }, entonces T(·) es dinámicamente gradiente con respecto a S .
Demostración. Para verificar la definición 4.3 se considera una solución global ξ x , con ξ x (0) = x. Como T(·) es gradiente con respecto a la familia invariante aislada S = {E 1,...,E n }, se cumple que
Por tanto,
⋄ Para cualquier solución global ξ: R → A existe 1 ≤ i, j ≤ n tal que
Para probar que S no tiene una estructura homoclínica se procede por reducción al absurdo. En otras palabras:
• Se admite un subconjunto {E k1 ,...,E kp } de S (p ≤ n), asociado a soluciones globales {ξ 1,...,ξ p } tales que
cuando 1 ≤ j ≤ p con E kp+1 = E k1 .
Como V es continua y decreciente a lo largo de las soluciones, para todo 1 ≤ j ≤ p y s ≤ 0 ≤ t se tiene
donde V(E kj ) = V(α(ξ j )) y V(ω(ξ j (0))) = V(E kj+1 ). Puesto que E kp+1 = E k1 , se desprende que V(T(t)ξ p (0)) = V(ξ p (t)) =V(ξ p (0)) y por la definición 4.6, ξ p (0) ∈ ∪p j=1 E kj . Por la invarianza de cada E kj se tiene que los conjuntos límites ω(ξ p (0)),α(ξ p )⊂E kj 0 para algún 1≤ j 0 ≤ p. Como ω(ξ p (0))⊂E kp+1 y α(ξ p ) ⊂ E kp , surge una contradicción con la definición de familia invariante aislada. Consecuentemente,
⋄ No existe una estructura homoclínica asociada a S .
Por tanto, el semigrupo satisface la definición 4.3.
4.2 Atractor tipo-gradiente
En el artículo de Carvalho et al. (2009), se presenta el concepto de atractor tipo-gradiente como el atractor que se caracteriza por medio de la unión de los conjuntos inestables de sus conjuntos invariantes asociados (8). En este contexto, de acuerdo con la clásica teoría de los sistemas dinámicos, el conjunto inestable de un subconjunto invariante E viene dado por
Ejemplo 4.9. Se considera los conjuntos invariantes
E 1 = {(0,0)}, E 2 = ∂D 2 y E 3 = ∂D 1
para el semigrupo generado por el sistema dado en (2). Los conjuntos inestables de cada E j son:
W u (E 1) = E 1, W u (E 2) = E 2 y W u (E 3) = int(D 2)\E 1.
Además, cuando los conjuntos invariantes son atractores locales, estos coinciden con sus conjuntos inestables.
En el siguiente teorema se describen las propiedades básicas de un semigrupo dinámicamente gradiente respecto a una descomposición de Morse del atractor global. En este contexto, se utilizan los conjuntos inestables para obtener atractores locales.
Teorema 4.10. Sea T(·) un semigrupo dinámicamente gradiente respecto a la familia invariante aislada S = {E 1,...,E n }. Si S es una descomposición de Morse de A . Entonces los conjuntos
son atractores locales de T(·) que satisfacen las inclusiones A 0 =
∅ ⊂ A 1 ⊂ ··· ⊂ A n−1 ⊂ A n = A y E j . Además,
Demostración. Una prueba aparece en el artículo de Aragão et al. (2011).
Del teorema 4.10 se desprende otra caracterización del atractor global:
y recibe el nombre de atractor tipo-gradiente.
Ejemplo 4.11. Si se considera los resultados del ejemplo 4.9 se tiene que
donde E
i
fueron obtenidos utilizando la relación
4.3 Construcción de la función de Lyapunov generalizada
Los siguientes resultados permiten construir la función de Lyapunov generalizada del teorema 4.13.
Proposición 4.12. Se asume que T(·) admite un atractor global A y que (A,A ∗) es un par atractor-repulsor para T(·), con A̸=∅.
.
L −1(1) = A ∗.
t≥0
bien definida y satisface:
K es continua en X y decreciente a lo largo de las soluciones.
K −1(0) = A y K −1(1)∩A = A ∗.
Si z ∈ A y K(T(t)z) = K(z), ∀ t ≥ 0 entonces z ∈ A∪A ∗.
f decreciente a lo largo de las soluciones.
f −1(0) = A y f −1(1)∩A = A ∗.
Si z ∈ X y f(T(t)z) = f(z), ∀t ≥ 0 entonces z ∈ A∪A ∗.
Demostración. Esta construcción aparece en los trabajos de Aragão et al. (2011); Carvalho et al. (2013) (vea también las tesis de Marín (2016)).
Los autores en el artículo de Aragão et al. (2011), recuerdan que en el artículo de «enCarvalho et al. (2009) aparecen los semigrupos dinámicamente gradiente(no requieren la existencia de una función de Lyapunov, sólo algunas propiedades en la descomposición de Morse del atractor) como un concepto intermedio entre los semigrupos gradientes y los semigrupos que admiten un atractor tipo-gradiente» (8). Para los semigrupos que admiten un atractor global, ser dinámicamente gradiente con respecto a una familia invariante aislada es equivalente a poseer una función de Lyapunov generalizada.
Teorema 4.13. Sea T(·), un semigrupo que admite un atractor global A y sea S = {E 1,...,E n }, una familia invariante aislada. Son equivalentes:
Demostración. La parte (1 ⇒ 2) se prueba en la proposición 4.8. Para obtener (2 ⇒ 1) se construye una función de Lyapunov generalizada V: X → R que satisface V(E k ) = k−1 para 1 ≤ k ≤ n. Inicialmente se reordena S para obtener una descomposición de Morse y se usa cada par atractor-repulsor (A j , A∗ j ). Con esto se consideran las funciones continuas K j dadas por
y se define
nV(z) = h(z)+ ∑ K j (z),
j=0
donde
Como las funciones h y K j son decrecientes a lo largo de las soluciones (proposición 4.12), se obtiene el primer ítem de la definición 4.6, según el cual:
⋄ La función [0,∞) ∋ t 7→ V(T(t)x) ∈ R es decreciente, para cada x ∈ X.
Para continuar se considera
En consecuencia
h(z) = 0, K j (z) = 1, si 1 ≤ j ≤ k−1 y K j (z) = 0, si k ≤ j ≤ n.
Es decir,
Por lo tanto, V(E k ) = k −1, para todo 1 ≤ k ≤ n y se obtiene la siguiente afirmación.
⋄ V es constante en E i , para cada 1 ≤ i ≤ n. Para probar que V satisface la definición 4.6 se afirma:
(9)
Para obtener (9) se observa que las funciones h y K j son decrecientes a lo largo de las soluciones de T(·), es decir,
h(T(t)z) ≤ h(z) y K j (T(t)z) ≤ K j (z),∀t ≥ 0 si 0 ≤ j ≤ n.
Si existe t > 0 con h(T(t)z) < h(z) (o bien K j (T(t)z) < K j (z), para algún 0 ≤ j ≤ n) se obtiene V(T(t)z) < V(z), lo cual genera una contradicción. Por tanto, h(T(t)z) = h(z),∀t ≥ 0 (o K j (T(t)z) = K j (z),∀t ≥ 0 cuando 0 ≤ j ≤ n). En otras palabras, cada f j = K j +h satisface
f j (T(t)z) = f j (z), ∀t ≥ 0.
De la proposición 4.12, se obtiene
Es decir,
En efecto, sea
obtiene que z ∈ A j ∪A ∗ j .
Si z ∈ A
j
se cumple que T(t)z ∈ A
j
⊂ A ,∀t ≥ 0 y así h(T(t)z) = 0 y K
j
(T(t)z) = 0, ∀t ≥ 0, luego V(T(t)z) = h
V(T(t)z) = V(z) = 0,∀t ≥ 0.
Si z ∈ A ∗ j , cada K j (T(t)z) = 1 y h(T(t)z) = 0, ∀t ≥ 0. Es decir,
V(T(t)z) = V(z) = n,∀t ≥ 0.
Esto demuestra (10). En otras palabras,
⋄ V(T(t)x) = V(x),∀t ≥ 0 si y sólo si x ∈ [ E i .
En consecuencia V satisface la definición 4.6. Por lo tanto, T(·) es un semigrupo gradiente con respecto a S .
Ejemplo 4.14. Del resultado del ejemplo 4.5, se concluye que T(·) es un semigrupo gradiente respecto a la familia invariante aislada S = {E 1,E 2,E 3}.
5. ESTABILIDAD DE SEMIGRUPOS GRADIENTE BAJO PERTURBACIÓN
En esta sección, se presenta la aplicación de toda la teoría desarrollada en las secciones anteriores.
Definición 5.1. El semigrupo T(·) se dice que es asintóticamente compacto si cada sucesión acotada x k ∈ X satisface lo siguiente: por cada sucesión t k ≥ 0 con lim t k = +∞, se obtiene que la k→+∞
sucesión inducida T(t k )x k admite una subsucesión convergente.
Con el objeto de aclarar y explicar mejor este concepto, se presenta el siguiente ejemplo sencillo:
Ejemplo 5.2. El semigrupo T(·) en X = R n para el cual la órbita de cada conjunto acotado es acotada (semigrupo acotado) es un ejemplo natural de un semigrupo asintóticamente compacto.
Teorema 5.3. Sea T(·) un semigrupo sobre un espacio de Banach X que es gradiente con respecto a una colección finita S de conjuntos invariantes aislados {E 1,...,E n }. Si A es un atractor global para T(·) y se cumple:
Para cada η ∈ (0,1], T η (·) es un semigrupo en X con atractor global A η ;
{T η (·)} η ∈[0,1] es una colección de semigrupos asintóticamente compacto
S η ∈[0,1] A η es acotada;
T η (·) converge a T(·), en el sentido que
uniformemente para cada u en un subconjunto compacto de X; y
Para cada η ∈ (0,1], A η contiene una colección finita de conjuntos invariantes aislados S de modo que l
existen δ > 0 y η 1 ∈ (0,1) de modo que para todo η ∈ (0,η 1), si ξ η : R → A η es una solución global, entonces
Entonces existe un η 0 > 0 de modo que, para todo η ∈ (0,η 0),
T η (·) es un semigrupo gradiente con respecto a S η . En particular
Demostración. La demostración aparece en el libro de Carvalho et al. (2013).
Los siguientes ejemplos ilustran adecuadamente las propiedades del teorema 5.3.
Ejemplo 5.4. La ecuación diferencial
x˙ = −x(x−η)(x+η), x ∈ R y η ∈ [0,1]
induce para cada η un semigrupo T η (·). Cuando η = 0, el semigrupo T 0(·) tiene un atractor global A = {0} y es gradiente con respecto a S = {E} (ejemplo 4.7). Además, se cumple lo siguiente:
Para cada η ∈ (0,1], T η (·) es un semigrupo en R con atractor global A η = [−η,η].
Por el ejemplo 5.2, la colección de semigrupos {T η (·)} η∈[0,1]
es asintóticamente compacto y S η ∈[0,1] A η = [−1,1] es acotada.
Sea x ∈ [−mη , mη], donde m ∈ Z y m ≥ 1, luego
|T η (t)x−T 0(t)x| ≤ 2mη
Implica
Por otro lado, desde que ξ
η
: R→A
η
es una solución global, existen
Por el teorema 5.3, existe un η 0 > 0 de modo que, para todo η ∈ (0,η 0), T η (·) es un semigrupo gradiente con respecto a S η .
Ejemplo 5.5. La ecuación diferencial
x˙ = −x(x−η −1)(x+η +1), x ∈ R y η ∈ [0,1]
induce para cada η un semigrupo T η (·). Cuando η = 0, el semigrupo T 0(·) tiene un atractor global A = [−1,1] y es gradiente con respecto a S = {E 1,E 2,E 3} donde E 1 = {−1}, E 2 = {1} y E 3 = {0} (ejemplo 4.4). Además:
Para cada η ∈ (0,1], T η (·) es un semigrupo sobre R con atractor global A η = [−η −1,η +1].
Por el ejemplo 5.2, la colección de semigrupos {T η (·)} η∈[0,1]
es asintóticamente compacto y S η ∈[0,1] A η = [−2,2] es acotada.
T η (·) converge a T(·), uniformemente en subconjuntos compactos de R.
Sea x
luego x ∈ [−1;−1 + mη) ó x = 0 ó x ∈ (1 − mη,1], para algún m . Si x = 0, se cumple trivialmente (11). Si x ∈ [−1;−1 + mη) ∪ (1 − mη,1], se tiene que |T η (t)x − T 0(t)x| ≤ (m + 1)η, y se cumple (11). Si x ∈ [−kη +1,kη +1], k ∈ Z , k ≥ 1, η ∈ (0,1], entonces |T η (t)x−T 0(t)x| ≤ kη, y se cumple (11).
Para η ∈ (0,1], A contiene una colección finita de conjuntos invariantes aislados S donde E y se cumple que
Además, se observa que para cada solución global ξ η : R → A η se cumple (12), cuando δ > 0 y η ∈ (0,1).
Por el teorema 5.3, existe un η 0 > 0 de modo que, para todo η ∈ (0,η 0), T η (·) es un semigrupo gradiente con respecto a S η .


