











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
1. INTRODUCCIÓN
La energía fotovoltaica es una de las más importantes fuentes de energía renovable que aparece como solución al rápido crecimiento de la demanda de energía e incremento de la contaminación ambiental debido al uso de combustibles fósiles. Abbou et al. (2016).
La alta incursión de sistemas fotovoltaicos monofásicos de baja potencia a las redes de generación distribuida, ha centrado la atención de las investigaciones de sistemas fotovoltaicos con microinversores integrados a cada panel solar con la finalidad de suplir las pérdidas de potencia debido al efecto sombra o a las características distintas de las celdas fotovoltaicas. En la mayoría de las aplicaciones fotovoltaicas, los paneles solares son conectados en serie y/o en paralelo para alimentar un conversor central pero la confiabilidad del sistema disminuye en caso de falla del inversor central. Islam et al. (2015). Para obtener el máximo punto de operación se utilizan distintos algoritmos de seguimiento del punto de máxima potencia (MPPT), pero una pérdida considerable de energía puede producirse debido a la orientación variable de los paneles solares y al efecto de sombra (Romero et al., 2013).
Con el fin de solucionar los problemas de eficiencia debido al efecto sombra, en la literatura existen muchas investigaciones sobre métodos para obtener el punto de máxima potencia tales como en Ji et al. (2015) y MacAlpine et al. (2013). El uso de los conversores flyback conectados a un inversor para obtener corriente alterna desde un panel solar, ha llamado la atención de los investigadores por ser simple en estructura, bajo costo y alta eficiencia si se compara con otras topologías de inversores aislados (Li et al., 2012). En la literatura científica existen estudios de módulos fotovoltaicos con inversor integrado, cuya topología tiene como enlace entre el módulo fotovoltaico y el inversor un conversor flyback. Las técnicas de control utilizadas son Control PI, Control Fuzzy, Control Optimo, Proporcional Resonante tal como en Li et al. (2012), Hamad et al. (2013), Fonkwe et al. (2014), Zhang et al. (2013) y Lee et al. (2016). Sin embargo, Lee et al. (2016) manifiesta que el diseño de los controladores es complejo debido a que, este tipo de configuraciones son muy inestables por la presencia del cero en el semiplano derecho (RHP) cuando funcionan en el modo de conducción continua (CCM) y no tienen un amplio rango de control. En tal sentido, Lee et al. (2016) presenta un control repetitivo (RC) tipo discreto con realimentación de la corriente de salida para asegurar la estabilidad del sistema en lazo cerrado funcionando en modo CCM. Pero de igual manera, el diseño del sistema es altamente complejo y el control repetitivo sufre de una inherente respuesta lenta (Dai et al., 2008).
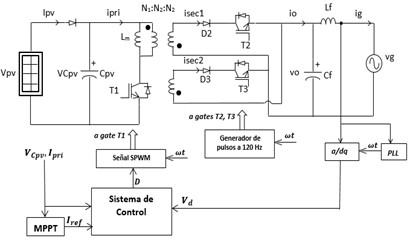
En el presente trabajo, se propone el diseño de un sistema fotovoltaico conectado a la red eléctrica basado en micro inversor con conversor flyback y control no lineal tal como se indica en la Figura 1. A diferencia de otros trabajos como el presentado por Lee et al. (2016), se propone un método sencillo de control basado en control no lineal para seguir la trayectoria de corriente del primario actuando en el modo de conducción discontinua (DCM) cuya referencia de corriente, en este trabajo, es obtenida del algoritmo de Conductancia Incremental para seguir el Punto Máximo de Potencia (MPP) para cualquier valor de irradiación y/o de temperatura. Para inyectar potencia activa a la red cuya corriente esté en fase con el voltaje de la red eléctrica, se propone primeramente obtener en el primario del trasformador una onda de corriente DC pulsante cuya envolvente sinusoidal es similar a un sistema de rectificación. Para esto, la señal de control del transistor T1 será una onda sinusoidal PWM modulada con una señal sinusoidal rectificada (RSPWM) sincronizada a la frecuencia de la red eléctrica. La relación de trabajo es obtenida de un controlador no lineal. Los elementos de potencia de la etapa inversora (T2 y T3) son conmutados de manera alternada para obtener corriente alterna. La corriente alterna generada es inyectada a la red eléctrica la misma que está en fase con el voltaje de la red, garantizando de esta manera un factor de potencia unitario. La corriente alterna obtenida desde el inversor es conectada a la red eléctrica a través de un filtro de salida para garantizar una corriente sinusoidal con bajo contenido armónico.
2. MODELO DEL INVERSOR FLYBACK
El circuito equivalente del conversor flyback es similar al circuito del conversor buck-boost con la diferencia de que la inductancia fija es reemplazada por un transformador de doble devanado en el secundario. Cada secundario del trasformador es conectado a un inversor formado por diodos (D2, D3) y transistores (T2,T3) tal como se indica en la Figura 1, conmutados alternadamente cada transistor a una frecuencia de 120 Hz de tal manera de obtener una onda de alterna de frecuencia
Además, se asume que la corriente del primario
que la corriente máxima del primario varíe sinusoidalmente. El transistor T1 es conmutado con la señal de control RSPWM a una frecuencia de conmutación
2.1 Modo de Conducción Discontinua
La Figura 2 indica una versión amplificada de la forma de onda de la corriente de magnetización cuya corriente del primario se da durante el tiempo
En el modo de conducción discontinua se cumple que:
donde:
Ts es el tiempo de conmutación =
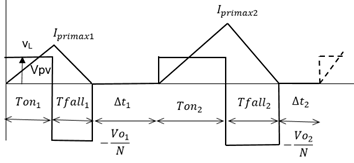
En conducción discontinua, el tiempo de apagado
donde
Asumiendo despreciable las pérdidas en el diodo anti-retorno, el valor máximo de la corriente del primario del transformador
donde:
Vpv es el voltaje de la celda fotovoltaica.
D(t) es la relación de trabajo.
Lm es la inductancia de magnetización.
Durante el tiempo de activado Ton del transistor T1 la corriente media del primario
Reemplazando Ecuación (5) en Ecuación (6) se obtiene lo siguiente:
Asumiendo despreciables las pérdidas en el inversor y en el filtro de salida
Ipv es la corriente media de la celda fotovoltaica.
Utilizando el principio de balance de potencia y asumiendo el factor de potencia unitario en el punto de acoplamiento común, el valor de la potencia instantánea está dado por la siguiente relación:
donde w es la frecuencia angular igual a
Reemplazando las Ecuaciones (7) y (8) en la Ecuación (9) y luego de algunas operaciones matemáticas se obtiene el valor de la relación de trabajo en el modo de conducción discontinua:
Para determinar el valor crítico de la inductancia de magnetización, primeramente, se considera que el sistema funciona en conducción continua. Entonces, asumiendo funcionamiento en estado estable e igualando a cero la integral del voltaje en la inductancia de magnetización en el periodo Ts se obtiene la siguiente relación, (Le et al., 2016):
Donde N es la relación de transformación;
El valor crítico de la inductancia de magnetización se calcula considerando la condición más crítica; esto es, el valor máximo de la relación de trabajo en el límite de conducción continua y discontinua se determina en el valor pico del voltaje de la red es decir cuando
3. DISEÑO DEL SISTEMA DE CONTROL
El controlador no lineal asegura que el valor medio de la corriente del primario
Para el diseño del controlador se asume lo siguiente:
Asunción 1.
Asunción 2. El voltaje de la red eléctrica es simétrico y sinusoidal entonces la componente en eje directo
Asunción 3. El voltaje
Asunción 4. La corriente es delimitada conociendo que el voltaje
Asunción 5. La referencia
3.1 Modelo del sistema
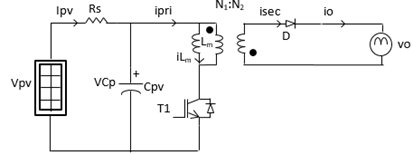
El circuito equivalente del sistema sin tomar en cuenta el efecto del filtro de salida es indicado en la Figura 3. Considerando que la resistencia Rs representa la resistencia serie interna del diodo anti-retorno conectado entre el capacitor de filtro
Para conseguir la corriente deseada y de esta manera controlar la potencia activa abastecida a la red eléctrica, la señal de error
donde
El sistema en lazo abierto es desarrollado reemplazando la ecuación (14) en (16) como sigue:
Para asegurar que la señal de error
donde
Substituyendo (18) en (17), luego de algunas operaciones matemáticas y considerando que
donde
3.2 Análisis de la estabilidad
Se escoge una función de Lyapunov no-negativa como sigue:
La derivada de la Ecuación (20) es:
Para garantizar que la señal de error
Puesto que la ganancia de control
De Ecuaciones (20) y (22) la señal de error
Tomando en cuenta la asunción 1, 2 y 5 conjuntamente con lo delimitaciones demostradas anteriormente, de la Ecuación (19) se puede determinar que D es delimitado. De lo demostrado arriba y la Ecuación (14)
4. RESULTADOS DE LA SIMULACIÓN
El paquete de simulación Matlab/Simulink con Simscape Power System se utilizó para modelar la dinámica del circuito del sistema fotovoltaico el que incluye el controlador no-linear. La simulación numérica fue desarrollada para validar el diseño del sistema de control. Los parámetros del sistema fotovoltaico son indicados en la Tabla 1, en donde el valor del capacitor del filtro
4.1 Cálculo de la Inductancia Crítica
Para el cálculo de la inductancia crítica se consideran los parámetros de voltaje y corriente de la celda fotovoltaica indicados en la Tabla 1 para obtener la potencia máxima a una irradiación de
De Ecuación (12), considerando la relación de transformación N=10 para obtener el voltaje pico de la red eléctrica igual a
Tabla 1 Parámetros del Sistema Fotovoltaico
| MPP de la Celda a 25 ºC | |||
| Irradiancia (W/m2) | Corriente Ipv (A) | Voltaje Vpv (V) | Potencia P (W) |
| 600 | 4,79 | 18,11 | 86,75 |
| 800 | 6,37 | 17,89 | 113,96 |
| 1000 | 7,94 | 17,6 | 139,9 |
| Parámetro | Valor | Parámetro | Valor |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
Para garantizar conducción discontinua, la inductancia para conducción discontinua
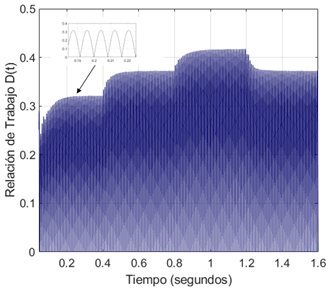
Con este valor de inductancia, se verifica si las relaciones de trabajo pico, calculadas utilizando la Ecuación (10), coinciden con los valores obtenidos de la simulación aplicando el control no-lineal para distintos valores de irradiación.
La Figura 4 indica la relación de trabajo D(t) obtenida del controlador multiplicada por una señal unitaria sinusoidal rectificada para valores de irradiación que varían de
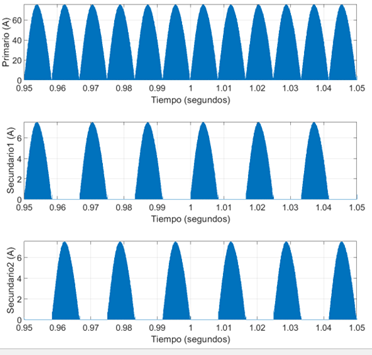
La Figura 5 indica las formas de onda de la corriente del primario
4.2 Cambio de la Irradiancia
Para verificar el correcto funcionamiento del controlador propuesto ante cambios bruscos de las condiciones atmosféricas, la irradiancia fue cambiada en pasos desde
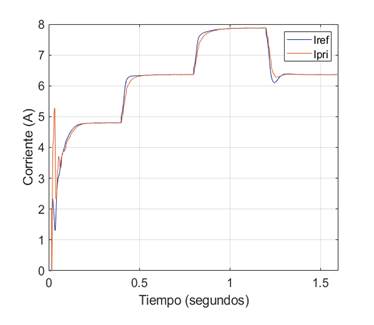
Figura 6 Formas de onda de la corriente de referencia Iref y el valor medio de la corriente del primario
Como se puede ver en esta figura, la corriente
La potencia de salida
Para ver la respuesta de la corriente inyectada a la red ante cambios bruscos de la irradiación, para efectos de visualización y análisis, se toma el intervalo de tiempo entre 1.1 seg. y 1.3 seg. tal como se indica en la Figura 8. De igual manera, para efectos de visualización la forma de onda de corriente fue escala en 10 veces. La Figura 8 indica el voltaje y la corriente inyectada a la red cuando la irradiancia cambia de
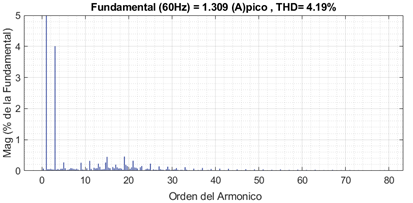
La Figura 9 indica la distorsión armónica total (TDH) para una irradiancia de
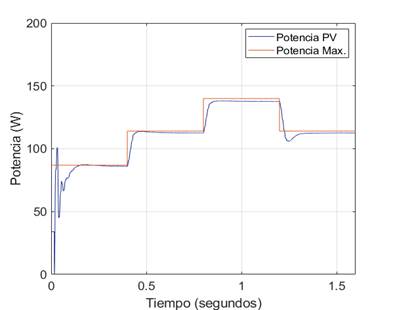
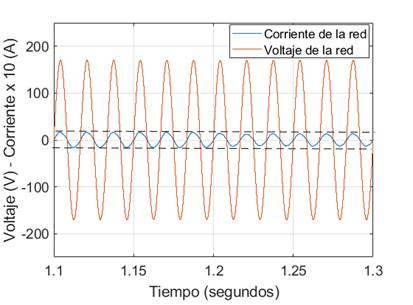
Figura 8 Voltaje y corriente de la red ante un cambio brusco de la irradiación al tiempo t=1.2 segundos
5. CONCLUSIONES
Se demostró que el control no lineal propuesto fue efectivo en seguir la referencia de corriente obtenida del MPPT.
Se demostró la efectividad y robustez del control no lineal en inyectar una corriente sinusoidal a la red eléctrica con factor de potencia muy cercano a la unidad ante cambios bruscos de la irradiancia.
Con el método de control propuesto no existe distorsión en los cruces por cero de la corriente alimentada a la red tal como lo manifiesta Li et al. (2012) debido a la conmutación alternada de los transistores del inversor, demostrando la efectividad del controlador en la obtención de una onda de corriente sinusoidal.
Sin embargo, de la desventaja que tienen este tipo de conversores al trabajar en el modo de conducción discontinua debido a la necesidad transistores con altos valores de corriente, esto se ve compensado por la sencillez del control nolineal propuesto y la calidad de energía y eficiencia obtenida



