











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
1. INTRODUCCIÓN
1.1 Antecedentes al estudio del dolor del cuello
El dolor de cuello (conocido también como columna cervical) es un trastorno musculo-esquelético que afecta a la salud o al normal desenvolvimiento de un individuo. En la actualidad, no se conoce sus precursores exactos y tampoco existen datos epidemiológicos locales (Robaina , 1998;ANT , n.d.). Por ello, las repercusiones a mediano y largo plazo son desconocidas. El sacrificio de la es- tabilidad del cuello a cambio de la movilidad (Magee , 2013), lo convierte en una zona vulnerable a lesiones, por lo que el estu- dio de este conjunto de articulaciones es un campo activo. Causas subyacentes, como choques del tejido nervioso, patología osteoligamentosa o anormalidades del control neuromuscular (Moskovich , 1988; Pettersson et al. , 1997; Ellingson et al , 2013), han sido identificadas como causas del dolor de cuello. A su vez, estas causas pueden haber sido originadas por traumatismos provocados por accidentes, mala postura, infecciones, condiciones inflamatorias, enfermedades reumáticas o por enfermedades congénitas (Antonaci et al , 2000; De Koning et al. , 2008). La diversidad de precursores para el dolor del cuello dificulta el diagnóstico de la afección, el mismo que depende fuertemente de la metodología empleada para llevarlo a cabo, lo que redunda en un tratamiento inadecuado para tratar la afección (Baydal , 2013). A esta dificultad se le adicionan factores como la estructura anatómica, los movimientos compensatorios, el sexo, la edad, la rutina, entre otros (Antonaci et al , 2000).
1.2 Técnicas y medidas contemporáneas
El comportamiento del cuello se puede cuantificar a través del rango de movimiento cervical (cervical range of motion), ROM, cuya medición puede ser obtenida usando métodos invasivos o no invasivos. Entre estos últimos se obtienen datos suficientemente confiables con Rayos X (Williams et al. , 2010), tomografía computarizada y resonancia magnética (Yoganandan et al. , 2001), goniómetros, inclinómetros (Jordan , 2000; Snodgrass et al. , 2014), Cybex o análisis cinemático 3D (Roozmon et al. , 1993) y escáneres electrópticos (Antonaci et al , 2000). La elección del método depende si el objetivo del mismo será de tipo cribado clínico o con fines investigativos sobre la funcionalidad del cuello. Notamos que el análisis de los movimientos de la columna cervical es más frecuentemente evaluado por motivos clínicos (Antonaci et al , 2000). En este contexto, los métodos más adecuados para una evaluación diagnóstica de la ROM son aquellos basados en inclinómetros, electrogoniometría y video/fotogrametría. Sin embargo, estos métodos son poco repetibles al depender de puntos anatómicos, los mismos que varían entre pacientes (Kraemer and Patris , 1989). Es necesario destacar los estudios realizados por (Cescon et al. 2014), que emplean el sistema de detección Virtual Reality Rehabilitation System (VRRS) en Padova, Italia. El equipo VRRS tiene una precisión ±0.2, y sus sensores son colocados en una diadema, fijados con cinta para evitar tracción. En cuanto a las limitaciones de los equipos basados en inclinómetros, destacamos que aunque los movimientos de flexo-extensión y flexión lateral son adecuadamente medidos, las curvas de trayectoria (obtenidas con muestras de movimientos de rotación axial) son del todo no repetibles y, consecuentemente, no fiables (Willinger et al. , 2005).
Por su parte, los equipos de video y fotogrametría garantizan la repetitividad del muestreo, lo que les otorga fiabilidad. En la actualidad, estos sensores son los más empleados para realizar investigación (Baydal , 2013). La técnica de fotogrametría reconstruye coordenadas 3D a partir de coordenadas 2D, a través de la superposición de imágenes provenientes de al menos dos cámaras. Esto la convierte en una técnica de medición indirecta. Las imágenes 3D son construidas estereoscópicamente por triangulación de puntos homólogos (Sánchez , 2006).
En general, las técnicas empleadas basadas en inclinómetros o goniómetros son poco manejables para los operadores y desagradable para el paciente. Esto repercute negativamente en la fiabilidad de los datos obtenidos y dificulta una evaluación precisa. Entonces, es necesario identificar un método menos invasivo y cuya operación sea menos compleja, sin sacrificar su utilidad clínica (e.g. cámaras digitales). En este documento determinaremos la curva de flexo-extensión del cuello usando equipos de bajo costo como la cámara Kinect de Microsoft. En la Sección 2 explicaremos las características de la cámara Kinect, así como el sistema de referencia que usaremos para los marcadores ópticos. Detallaremos el procesamiento de las imágenes de color y profundidad recolectados y el procedimiento para la adquisión de las coordenadas espaciales. Nuestros resultados experimentales de validación serán resumidos en la Sección 3 y nuestras conclusiones se expondrán en la Sección 4.
2. MATERIALES Y MÉTODOS
2.1 Sensores ópticos
La metodología se desarrolla en torno al uso de un sensor Kinect de Microsoft. El dispositivo cuenta con un proyector láser, una cámara infrarroja, una cámara RGB, micrófonos y un procesador personalizado de la marca PRIMESENSEPS1080. Además, el dispositivo tiene una cámara RGB con sensor CMOS (con un filtro de Bayer) con una resolución de 640 × 480 pixels, operando a 30fps. Finalmente, tiene una cámara de profundidad basada en un emisor infrarrojo y una cámara infrarroja con sensor CMOS monocromático cuya resolución es de 640 × 480 pixels, operando a 30fps. La profundidad de las imágenes se determina en función del tiempo que se demora en reflejar la luz infrarroja (Ladino y Monsalve , 2015; Nuño , 2012). La imagen RGB está compuesta por un conjunto de pixels, compuestos de cuatro componentes: rojo, verde, azul y transparencia (alfa), respectivamente. El último canal funciona también como RGBa y como vacío para imágenes RGB. Cada componente tiene un valor entero de 0 a 254 (correspondiente a byte), por lo que cada pixel posee cuatro bytes. En el caso de la cámara de profundidad, cada pixel almacena un valor de intensidad almacenado en dos bytes, lo que provee 2048 niveles de sensibilidad en profundidad. Éste valor establece la distancia entre el sensor en milímetros (kinectformatlab , n.d.).
2.2 Marcadores técnicos, anatómicos y de referencia
Para determinar una adecuada toma de muestra establecemos la ubicación de los marcadores tomando en consideración resulta- dos previos. La cantidad de marcadores varía en cada metodolo- gía, aún cuando existen ciertas similitudes entre diversos autores. En particular, podemos resaltar el trabajo realizado recientemente usando técnicas similares de fotogrametría. Baydal (2013) expone la utilización de un casco con cuatro marcadores reflectantes equidistantes en la cabeza. Cada marcador se encuentra a 20cm del casco con los objetivos de aumentar la inercia del modelo ti- po sólido rígido y disminuir el error en el cálculo de las variables cinemáticas. Para establecer los ejes de referencia locales de cada individuo, se coloca un marcador a la altura de la cervical C7 y dos marcadores situados sobre los lóbulos auditivos.
Por su parte, Bertomeu y Jaén (2007) usa dos marcadores anató- micos colocados en la espalda (a la altura de la cervical C7), dos marcadores anatómicos (a la altura de los lóbulos auditivos) y tres marcadores técnicos (en la cabeza) empleados durante el movi- miento. Díaz-Rodríguez et al (2016) emplea seis marcadores téc- nicos que se encuentran ubicados en la diadema con cuernos, tres en cada cuerno. Para la etapa de referencia emplea marcadores anatómicos en los lóbulos auditivos y dos en el tórax. La medición de parámetros inerciales se realiza con dos marcadores infraorbi- tales (ubicados en el punto por debajo de la órbita de los ojos) dos puntos tragiones (aleta de la oreja, sobre el trago) y un marcador Sellion, ubicado en el punto de apoyo de las monturas de las gafas sobre la nariz (McConville et al, 1980). En el caso de Grip et al. (2007) se utiliza un protocolo con 13 marcadores. Cinco marcadores son colocados en la cabeza, en forma de racimo rígido, un marcador se coloca en la escotadura supraesternal, tres marcadores en una placa rígida en la parte posterior del torso, un marcador en cada hombro y uno en cada fosa mandibular. Los últimos dos marcadores se emplean para estimar la altura cervical y son eliminados antes de la prueba de reposicionamiento. (Grip et al. , 2008) también emplean cinco marcadores en forma de racimo en la cabeza. Además, un marcador en la muesca supraesternal, tres en una placa rígida en la parte posterior, una en cada hombro, una en cada fosa mandibular y cuatro en una placa rígida en cada brazo superior. La placa posterior se la coloca a la altura de las vértebras torácicas T6-T8. Lo que totaliza 21 marcadores, analizados con ProReflex del laboratorio Qualisys Medical AB, utilizando cinco cámaras infrarrojas para un muestreo a 120Hz. Ohberg et al. (2003) presentan un tipo de disposición de marcadores diferente: tres marcadores en la cabeza colocadas con unas barras de 11cm y separado a 13cm uno de otro consecutivamente. En el tórax del paciente se colocó un chaleco ortoplástico con tres marcadores, dos a la altura de la clavícula y uno a la altura de la muesca supraesternal.
La Figura 1 muestra la disposición de los marcadores usados en nuestro estudio. La detección usa cinco marcadores: tres marcadores técnicos ubicados en una diadema a 20cm de la cabeza, MT1, MT2 y MT3 (con el fin de aumentar la inercia del modelo del sólido rígido y disminuir el error en el cálculo de las variables cinemáticas, e.g., (Baydal , 2013)). Como marcadores anatómicos, colocamos un marcador a la altura del lóbulo auditivo, MA1, que sirve como un punto de referencia inicial (Díaz-Rodríguez et al , 2016). Así mismo, usamos un punto de referencia en la silla, MS1, para detectar movimientos de la misma en el muestreo.
2.3 Procedimiento para toma de datos
Hemos establecido que el número mínimo de sujetos de prueba sean 7 y que el número de muestras por sujeto sean 3, similar al trabajo de Ruíz (2018). Las personas de prueba varían en peso y talla, y sus edades se encuentran entre 17 a 40 años. Todos los sujetos se encuentran aparentemente sanas, sin ningún trauma o enfermedad en las articulaciones del cuello. Se realizan dos muestreos a cada sujeto de prueba en tres sesiones. En el primer caso el paciente no se mueve y se registra las ubicaciones de los cinco marcadores. El segundo muestreo se realiza con movimientos armónicos y naturales de flexo-extensión para registrar la trayectoria de los tres marcadores técnicos.
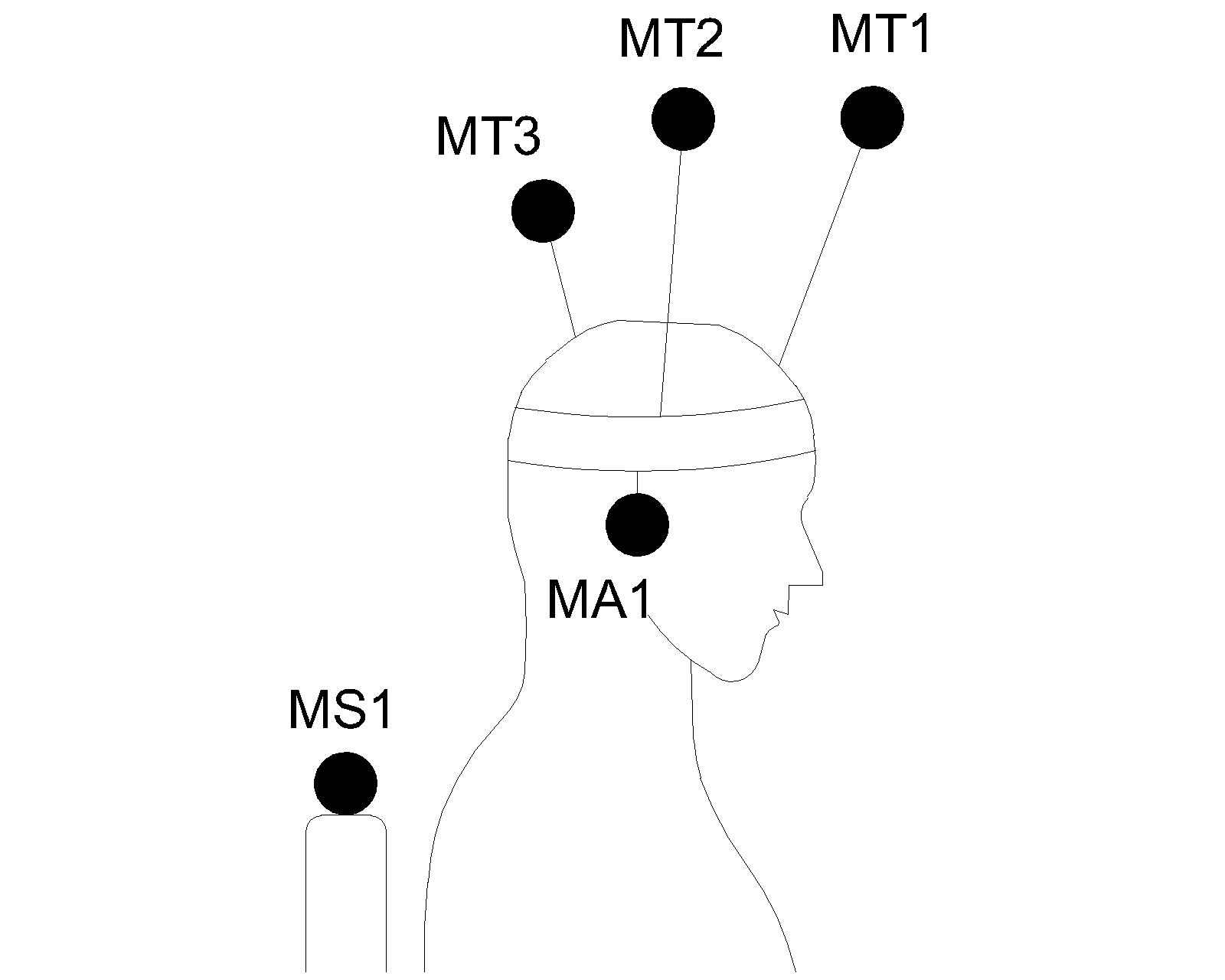
Figura 1. Ubicación de marcadores en el sujeto de prueba. MT1, MT2 MT3 son los marcadores técnicos, colocados a 20cm de la cabeza. MA1 es el marcador anatómico, ubicado en el lóbulo auditivo. MS1 es el marcador de referencia de la silla donde se ubica el paciente.
La cámara Kinect se coloca a ∼ 1, 90m desde la pared y a una altura de ∼ 1, 05m. La disposición de la cámara cubre totalmente el campo visual donde se ejecutará la prueba. en peso y talla. El centro de coordenadas (0, 0) se obtiene de una imágen de 640 × 480 pixels, localizada en x0 = 640/2 y z0 = 480/2. Gracias al acelerómetro del Kinect podemos controlar por software la inclinación de la cámara. De igual manera, verificamos la perpendicularidad de la cámara al plano de muestreo al comprobar los valores de profundidad con las cuatro esquinas de la habitación donde se toma el muestreo.
2.4 Adquisición de videos RGB y de profundidad
La obtención y almacenamiento de las muestras cinemáticas del cuello se llevó a cabo mediante tres programas. El primer programa almacena simultáneamente videos de las imágenes RGB y de profundidad. En este programa hemos tomado las siguientes consideraciones:
El video para la imagen RGB es almacenado con formato Uncompressed AVI, con extensión “.avi” y con una frecuencia de 30fps.
La imagen de profundidad se almacena con formato Motion JPEG 2000, con extensión “.mj2”. y con una frecuencia de 30fps. Debemos considerar que cada pixel tiene 16 bits.
El segundo programa procesa los videos para obtener las trayectorias de los marcadores. El programa realiza un procesamiento con visión artificial de la imagen RGB utilizando herramientas de binarizado y operaciones morfológicas, presentes en el programa Matlab. Realizamos este procesamiento en cada frame, tanto de la imagen RGB, como de profundidad. En la Figura 2 podemos apreciar el desfase entre las dos imágenes, propio del arreglo de las cámaras internas del sensor Kinect. En particular, de la imagen RGB obtenemos los valores de las componentes X y Y, mientras que de la imagen de profundidad obtenemos la componente Z.
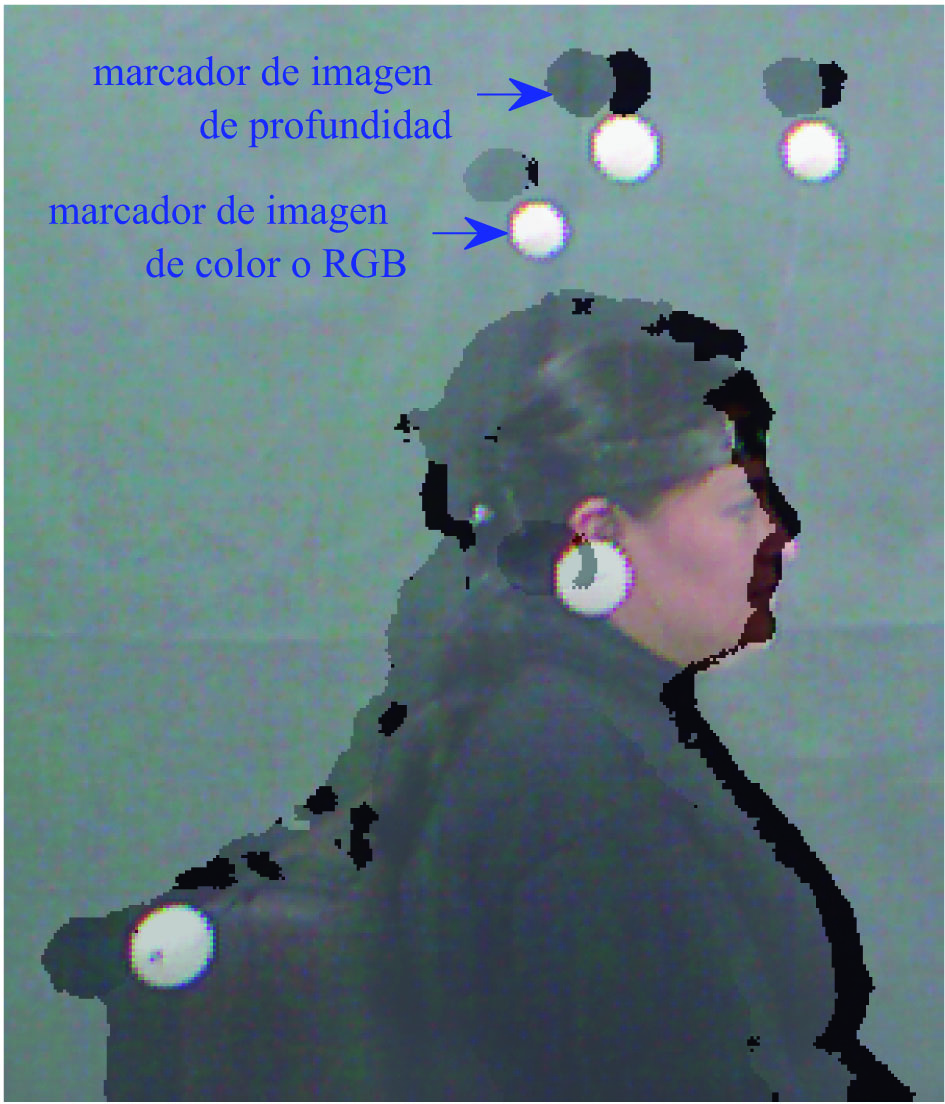
Figura 2. Desplazamiento entre las imágenes de color o RGB (círculos blancos) y de profundidad (círculos gris) causado por la ubicación de las cámaras en el sensor Kinect.
El seguimiento de objetos en movimiento es un tema fundamental dentro de la visión artificial y ampliamente utilizado en muchos campos como la medicina, proyectos militares, vídeo vigilancia, navegación robotizada, entre otros; aunque el seguimiento de múltiples objetos sigue siendo un desafío (Park et al. , 2012; Li et al. , 2010). Para corregir el desplazamiento se utilizó el filtro Kalman, que es un algoritmo que estima el estado del sistema a partir de los datos medidos y luego estimar los estados a partir del error. El filtro permite predecir cuál será la siguiente posición de cada marcador basándose en la posición anterior de cada marcador (Patel y Thakore , 2013), lo que habilita el seguimiento del mismo. Este procedimiento se basa en 1) la predicción del estado del sistema, que se predice con el modelo dinámico y en 2) el paso de corrección, que se corrige con el modelo de observación, de tal modo que el error de la covarianza del estimador es minimizada con un estimador óptimo (Ali y Hassan , 2014; Mathworks , n.d.).
Considerando un sistema de seguimiento, donde
-
Ecuación del proceso
donde A representa la matriz de transición y
-
Ecuación de medición
donde H es la matriz de medición y
-
Actualización de ecuaciones del proceso
Con el valor de
-
Actualización de ecuaciones de medición
El objetivo de este sistema de ecuaciones es la estimación a posteriori a través de
Para obtener los centroides de los marcadores en la imagen de profundidad, convertimos a la imagen a una escala de grises y luego la binarizamos tomando en cuenta los umbrales promedio de intensidad, tal como se muestra en la Figura 3. Los umbrales de intensidad se obtienen directamente de la imagen adquirida (en ∼ 11 capas). En esta escala, los tonos azules son la primera capa y representan los errores de lectura del sensor Kinect, debido a los problemas de reflectancia localizados en los bordes. Los umbrales del 6 al 11 son los más representativos para la lectura de los marcadores y están ordenados como: cyan, verde, amarillo, naranja, naranja-rojizo y rojo. Los umbrales del 6 al 9 contienen a los marcadores y son extraídos empleando operaciones morfológicas. Las capas 1, 10 y 11 son descartadas porque pertenecen a las lecturas erróneas y al fondo de la imagen, respectivamente. Con la obtención de los centroides de los marcadores adquirimos en cada punto la componente Z que nos entregará el valor de profundidad expresado en milímetros. Notamos además que ésta variable tiene formato uint16.
La conversión de unidades de las variables X , Y y Z a centímetros se lleva a cabo tomando en consideración las características de nuestro sensor óptico. La cámara Kinect tiene un ángulo de visión de 57◦ en horizontal y 43◦ en vertical, con una resolución de 640 × 480 pixels. En nuestro caso de estudio, la disposición geométrica del sensor Kinect se presenta en la Figura 4. El Kinect y la imagen
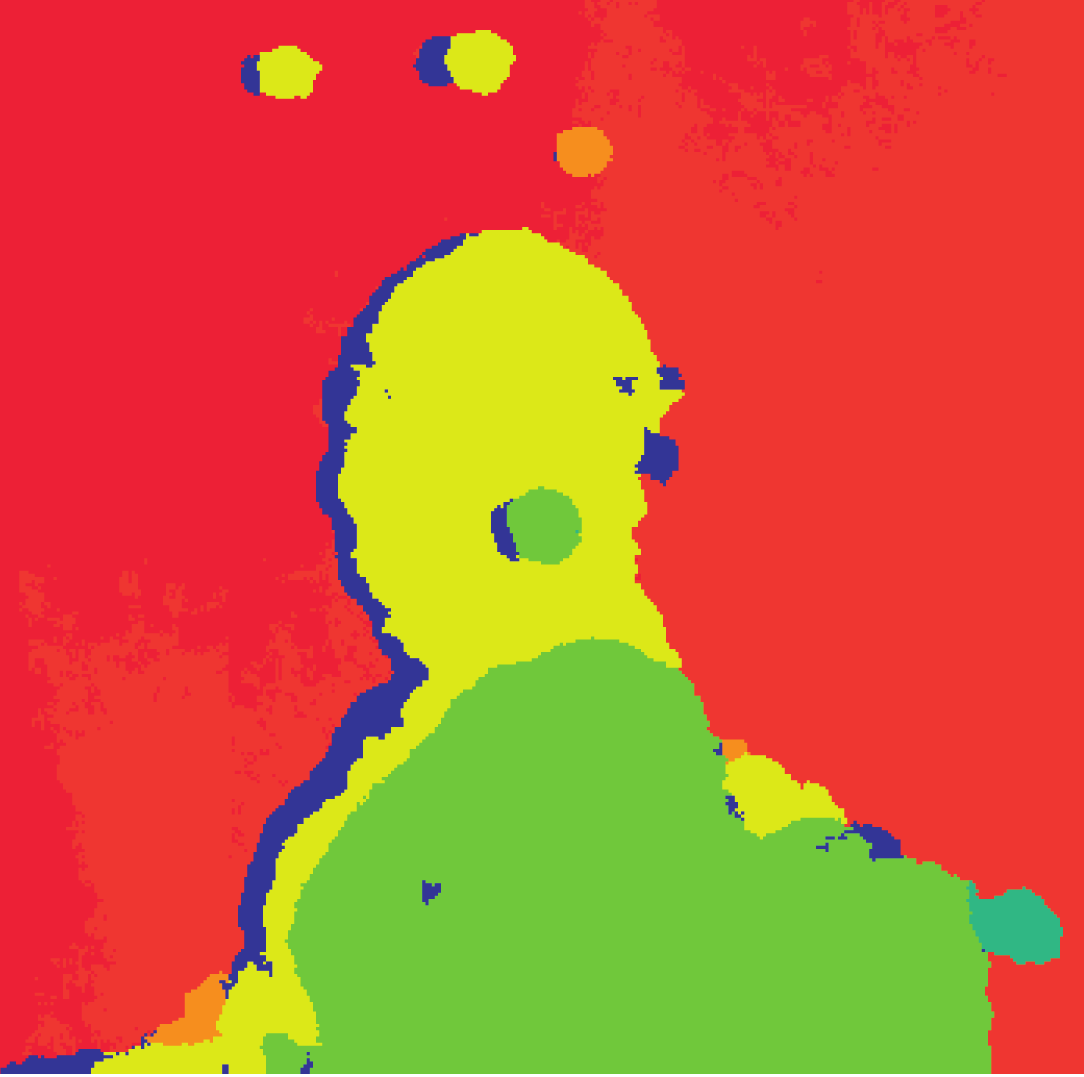
Figura 3. Multi umbrales de intensidad para binarizado de imagen de profundidad. Cada color representa un umbral de intensidad, que nos permite binarizarlo individualmente. Los umbrales de intensidad tienen 11 capas (en promedio). Los tonos azules son la primera capa y representan las lecturas no leídas por el sensor Kinect. Los umbrales del 6 al 11 son los mas representativos para la lectura de los marcadores y están en el siguiente orden: cyan, verde, amarillo, naranja, naranja-rojizo y rojo. Los umbrales cyan, verde, amarillo y naranja contienen a los marcadores que nos proveerán de sus centroides. Hemos descartado las capas 1, 10 y 11.
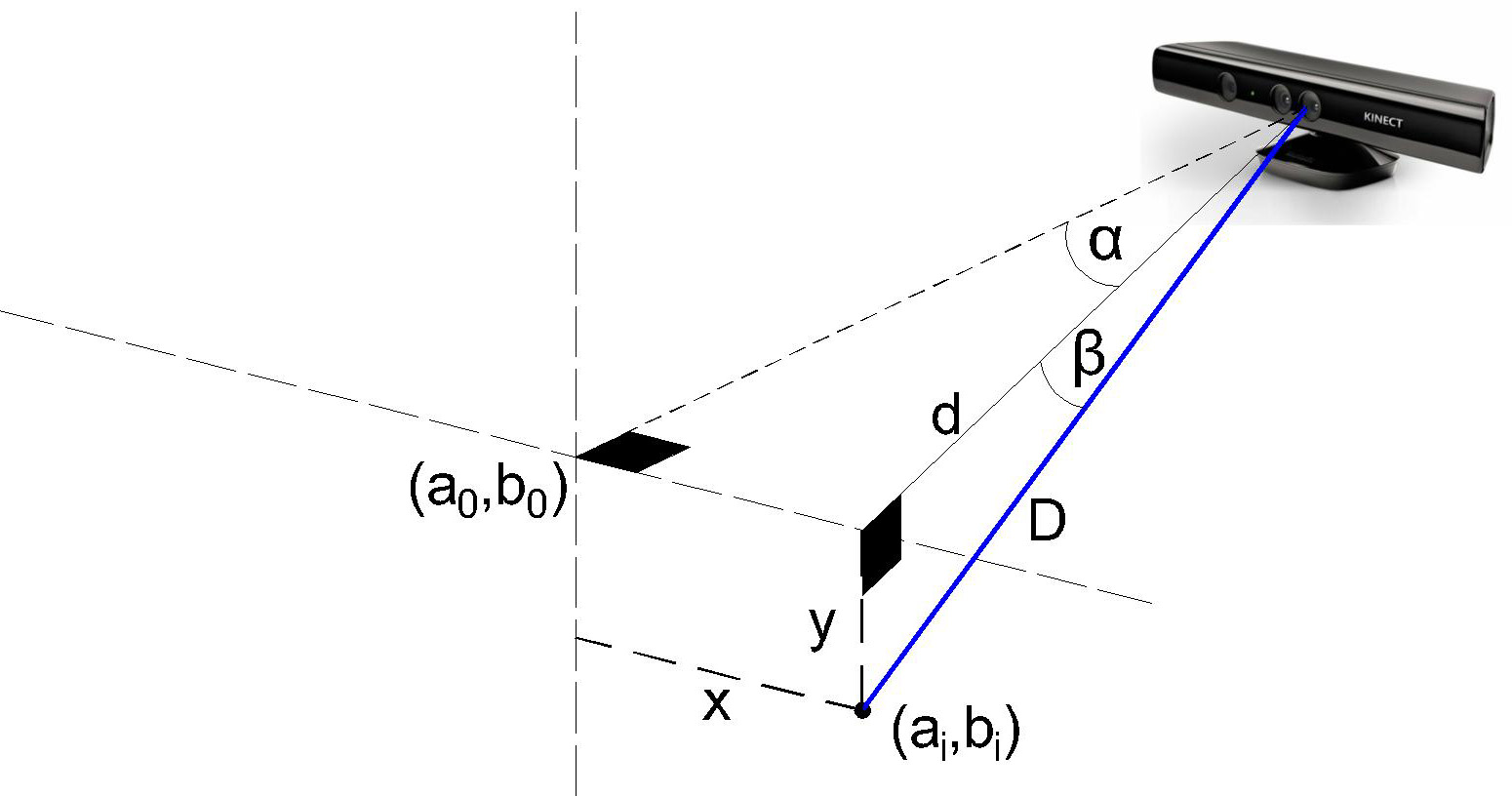
Figura 4. . Ubicación del sensor Kinect respecto al plano que contiene las coordenadas espaciales X − Y de los marcadores. Los ángulos de apretura
obtenida son perpendiculares por lo que establecemos el centro de la imagen como nuestro punto de referencia (0, 0), con lo que
Por su parte, las variables X , Y y Z toman en consideración la inversión vertical que se aprecia en la misma Figura 4.
Donde
3. RESULTADOS EXPERIMENTALES
Al observar la Figura 5 apreciamos que las trayectorias de los 3 marcadores técnicos son continuas y se asemejan al movimiento realizado por los sujetos de prueba. La elección del filtro de Kalman resulta ser idónea. Tal como se muestra en la Figura 6, la trayectoria de los marcadores es continua para los 3 componen- tes y no existe mezcla de datos en el tiempo. Esto podría ocurrir cuando los marcadores se encuentran en el punto de máxima flexión o en el punto de máxima extensión. En los paneles a) y b) se aprecian el punto de máxima extensión en ∼ 25s y el punto de máxima flexión en ∼ 11s, respectivamente, en las componentes X e Y . El panel c) evidencia los pequeños desplazamientos en la componente Z, cuyos valores pueden interferir en el cálculo de las componentes cinemáticas.
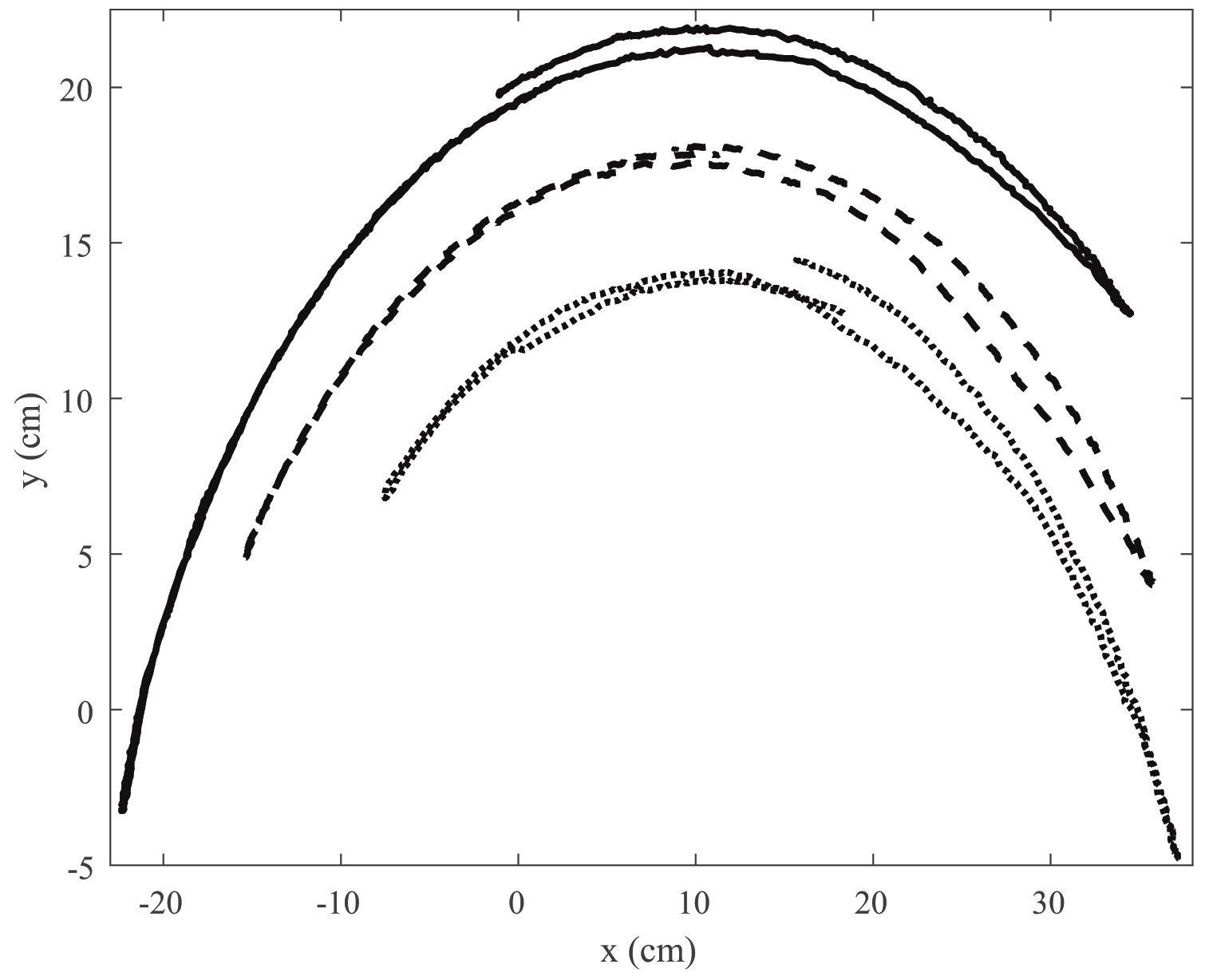
Figura 5. Trayectoria de los tres marcadores técnicos en el plano X − Y. La línea continua representa al marcador MT1, la línea segmentada al marcador MT2 y la línea punteada al marcador MT3.
La Tabla 1 recoge las variables cinemáticas más importantes, i.e., ángulo máximo, rango de movimiento (ROM), velocidad angular media (
Tabla 1. Valor medio y desviación estándar (std) de las variables cinemáticas del movimiento de flexo-extensión. Los valores fueron obtenidos de los ensayos realizados a todos los sujetos de prueba, en tres sesiones cada uno.
|
Variable |
Media |
Std |
|
Ángulo máximo (°) |
37.36 |
17.32 |
|
ROM (°) |
92.38 |
15.88 |
|
Ω(°/s) |
0.79 |
1.96 |
|
Armonía (°/s/°) |
0.46 |
0.09 |
La comparación directa de las variables cinemáticas nos muestra que el valor de armonía es inferior a 0.70, correspondiente a trayectorias no lineales y poco reproducibles. Los parámetros de ángulo máximo y ROM tienen alta desviación estándar (Std), lo que confirma que, a pesar de existir buen control en el muestreo, existen parámetros externos que influyen y afectan al sujeto de prueba
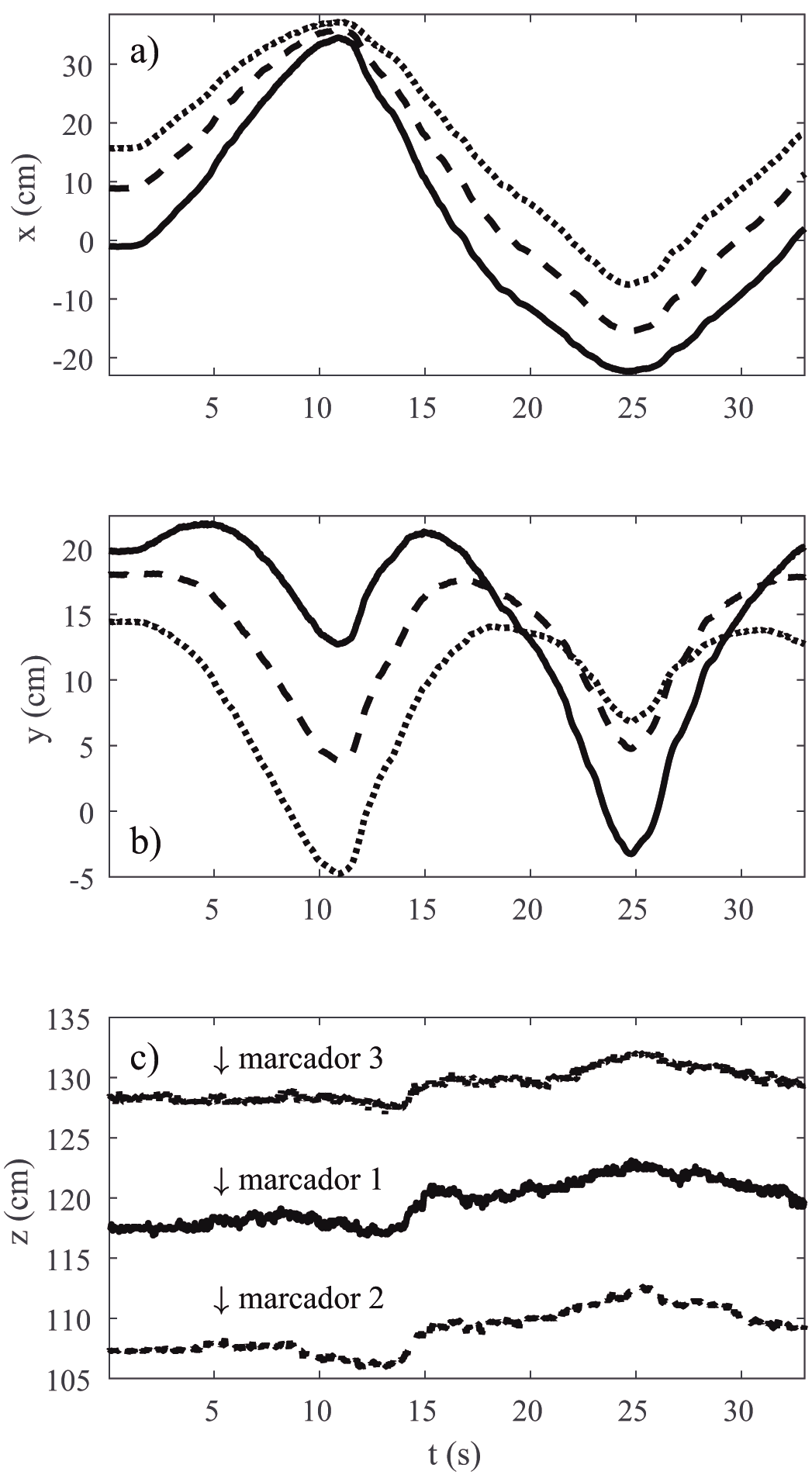
Figura 6. Descomposición X (a), Y (b) y Z (c) de cada trayectoria en función del tiempo t . La línea continua representa al marcador MT1, la línea segmentada al marcador MT2 y la línea punteada al marcador MT3.
El análisis de fiabilidad lo realizamos mediante la correlación de las muestras entre sesiones. En nuestro caso, analizamos la correlación entre
Tabla 2. Valores estadísticos, SEM, CMC y de Pearson, obtenidos de la correlación del ángulo
|
Variable |
SEM |
CMC |
Pearson |
|
Sesiones 1 & 2 |
18.41 |
0.846 |
0.826 |
|
Sesiones 1 & 3 |
14.13 |
0.923 |
0.899 |
|
Sesiones 2 & 3 |
10.32 |
0.848 |
0.930 |
Tabla 3. Valores estadísticos, SEM, CMC y de Pearson, obtenidos de la correlación de la velocidad angular media ω .
|
Variable |
SEM |
CMC |
Pearson |
|
Sesiones 1 & 2 |
6.61 |
0.872 |
0.845 |
|
Sesiones 1 & 3 |
7.25 |
0.802 |
0.845 |
|
Sesiones 2 & 3 |
4.15 |
0.854 |
0.906 |
Tabla 4. Valores estadísticos, SEM, CMC y de Pearson, obtenidos de la correlación de RO en función de la posición cartesiana en X.
|
Variable |
SEM |
CMC |
Pearson |
|
Sesiones 1 & 2 |
2.52 |
0.832 |
0.898 |
|
Sesiones 1 & 3 |
3.17 |
0.859 |
0.815 |
|
Sesiones 2 & 3 |
1.51 |
0.857 |
0.908 |
Tabla 5. Valores estadísticos, SEM, CMC y de Pearson, obtenidos de la correlación de RO en función de la posición cartesiana en Y.
|
Variable |
SEM |
CMC |
Pearson |
|
Sesiones 1 & 2 |
1.85 |
0.821 |
0.803 |
|
Sesiones 1 & 3 |
3.34 |
0.808 |
0.873 |
|
Sesiones 2 & 3 |
0.84 |
0.823 |
0.857 |
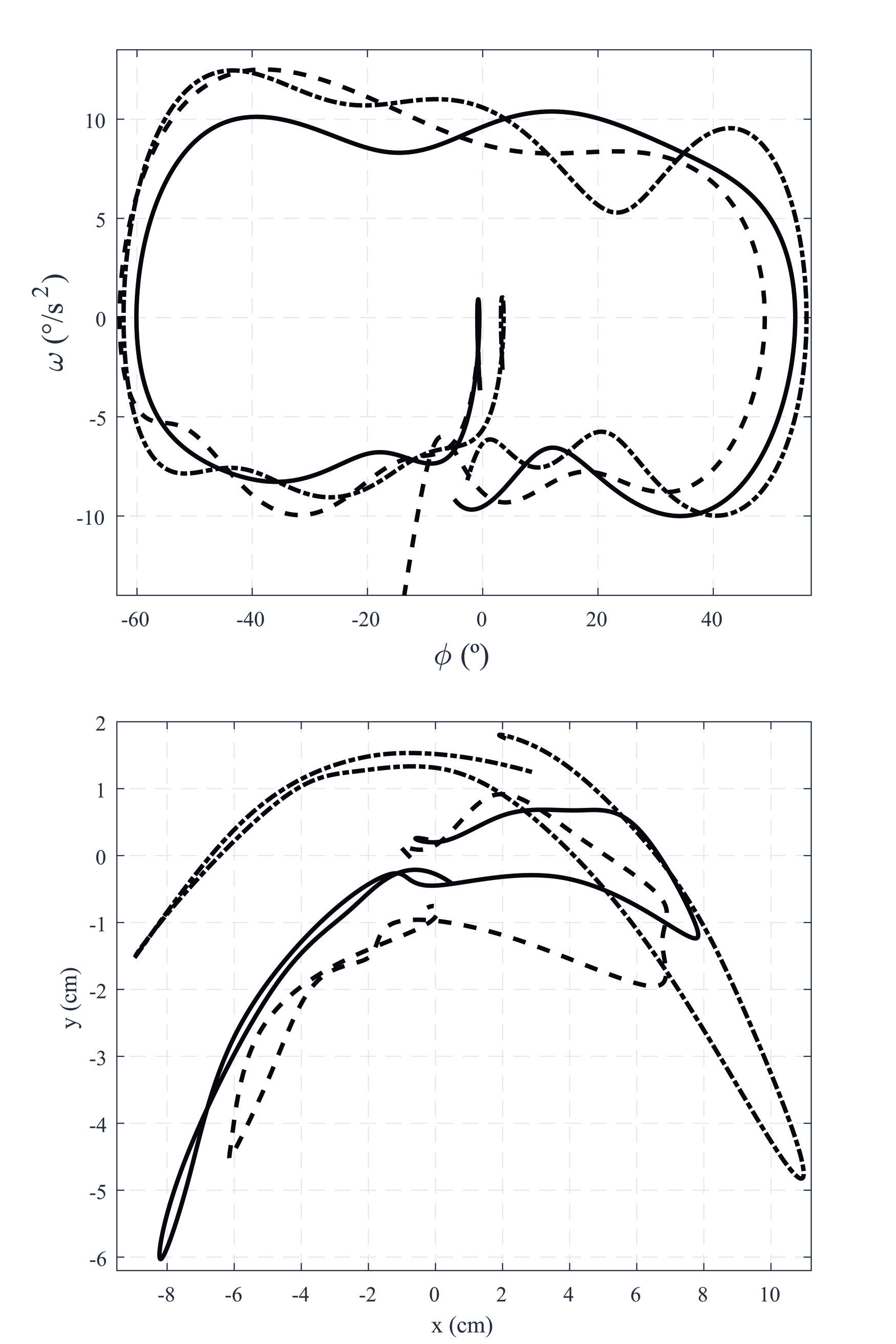
Figura 7. El panel a) se muestra el gráfico fasorial de ω en función de
Las Figura 7 muestran la evolución de la correlación de
4 CONCLUSIONES
La medición de los parámetros cinemáticos del cuello, y su corre- lación, es de particular valor en la actualidad. Un método que sea confiable y reproducible es necesario. La técnica presentada en este documento se basa en video y foto- grametría adquiridos con una cámara Kinect. Si consideramos los valores de SEM (





