Inglês (pdf)
Inglês (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
Permalink1. INTRODUCTION
It is known that some of the inherent qualitative characteristics of dynamic systems have been specified through rigorous analytic techniques. However in the specific case of nonlinear systems, there may be examples where there are not explicit solutions for the differential equations that describe their dynamics, and further, there are systems that exhibit multiple equilibrium points, limit cycles, bifurcations, among other features. Under these circumstances, the qualitative analysis of differential equations is a viable alternative to learn about the dynamic behaviour of these systems.
In this sense, the converse theorems are key tools in the stability analysis of dynamic systems. Some classical references on the subject are the works reported in Krasovskii (1963) and Hahn (1967). More recent references are the papers presented in Khalil (2000) and Fantoni and Lozano (2002). The references mentioned have been developed as a result of the research effort published in Lyapunov (1892); where the local and global equilibrium points in linear systems and in some nonlinear systems are studied. A concise reference to the concepts of the theory of Lyapunov is the text by Slotine and Li (1991).
In general, local results do not provide a comprehensive explanation of the behaviour of nonlinear systems. Therefore it is necessary to use other tools for the study of systems of second order quadratic differential equations, as the one considered in this paper. For this purpose, two references that analyze the behaviour of these differential equations are used: the first is aimed at sorting through the use of inequalities the different behaviours of bounded quadratic systems Coppel (1966), and the second is the work shown in Perko (1970) which, through qualitative analysis of these dynamic systems, seeks to classify them in terms of an atlas represented in phase portraits. Both references are summarized in the textbook Perko (2000).
An application to stability analysis through the qualitative techniques referenced above is presented in Spinetti-Rivera (2011), where the behaviour of the Boost power converter is discussed.
The analysis technique presented in Spinetti-Rivera (2011) was validated by answering the questions presented in the work of Sira-Ramírez (2005), on the stability of the operation in some power converters. This analysis technique was complemented and improved in successive works published by Spinetti-Rivera et al. (2015) and Llibre et al. (2015). Some of the tools used in this work for qualitative analysis of quadratic closed loop feedback systems were obtained from the work Coll et al. (1987) and Giacomini et al. (1996).
This paper develops a qualitative analysis of a nonlinear closed-loop system, specifically the Buck-Boost power converter with a state vector feedback. It is a second order non-linear quadratic differential system that has no explicit solution. It is intended to study the behaviour of the trajectories between finite and infinite equilibrium points, with respect to changes in system and controller parameters, specifically when there is a single finite equilibrium point; for which three techniques are used, namely, the direct method of Lyapunov, the theorems of Dickson and Perko for second order quadratic differential systems and the linearization around finite equilibrium points.
2. BUCK-BOOST POWER CONVERTER
The main characteristic of the Buck-Boost circuit design can be operate as a step up or as a step down voltage converter, that is, its output voltage may be lower or higher than the power supply. Figure 1 illustrates its circuit diagram.
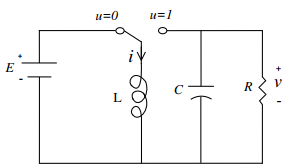
The paper in Sira-Ramírez (1988) shows how the average behaviour of the circuit of Figure 1 may be represented by a continuous time model, applying the laws of Kirchhoff and Ohm. This is:
where i is the inductor current, v the voltage on the capacitor, R the resistance of the load, L the inductance of the coil, C the capacitance, E the power supply and u the DC control input, which is defined in the range [0,1]. In order to facilitate the calculations, let τ and Q be defined as τ =
The normalized system (1) may be represented as
where the normalized variable x(τ)=x is the coil current, y(τ)=y is the capacitor voltage, Q is the charge and u
wherein the desired value of the output voltage of the capacitor Vd is equilibrium value of the system, that is,
By moving system (3) to the origin, which is achieved through the change of coordinates defined by
Before making the analysis of equilibrium points, the feedback control loop using the state vector with a gain k=[α β] will be considered. Thus, the equation of the control law is defined by
The dynamics of the closed loop system is obtained replacing the controller (6) in (5) and the equilibrium values of
Equating to zero the right sides of (7), solving for e1 in the first equation and substituting it into the second equation, the equilibrium equation based on
Since (8) is a polynomial of degree three, the Cardano method to characterize its roots will be used. The discriminant of Cardano
If
If
If
This work will analyze only the case when there is one real equilibrium point; for which Proposition 1 establishes the range of values for the parameters.
Proposition 1. The existence of a single real equilibrium point is defined by the conditions
a>0 and
Restrictions for the parameters are: Q>0,
This range is defined as
3. LYAPUNOV STABILITY ANALYSIS
In order to apply the concept of stability in the sense of Lyapunov, under the conditions provided in Proposition 1, it is necessary to have a single real equilibrium point located at the origin (0,0).
Theorem 1. System (7) is globally stable if there is a unique equilibrium point.
Proof. Let the positive definite Lyapunov function candidate V(e) be defined as
According to the direct method of Lyapunov, if the derivative of the Lyapunov function candidate evaluated in the trajectories of the dynamical system is negative definite, then the system will display a globally stable behaviour. The derivative
Substituting Equation (7) in (10) yields an error dependent equation, which has the form
Since
and Ma is the skew symmetric matrix of Ms. Since the term eTMae=0, it suffices analyzing the function
Rewriting
where the sign of
According to Sylvester criterion it suffices that -Ms>0, so that
The determinant of the first minor is
The determinant of the matrix -Ms is given as
To ensure compliance of
since the term that accompanies β2 is negative definite (
Note that since of Q>0, α>0 and
From the above analysis it is shown that
Corollary 1. In the boundary conditions for the System (7) stability in the sense of Lyapunov does not apply.
Proof. If the discriminant of Cardano
4. ANALYSIS VIA THEOREMS OF DICKSON AND PERKO
Theorems of Dickson and Perko (1970), see Appendix, allow qualitative analysis of quadratic second order systems. Theorem 5 is formulated to analyze Bounded Quadratic Systems ($BQS$), while Theorem 6 facilitates studying the qualitative behaviour of systems with a unique real equilibrium point (BQS1).
4.1 Bounded Quadratic Systems (BQS)
According to Theorem 5 of Appendix, after applying a linear transformation, System (7) must be affine and equivalent to one of the following Systems (25), (26) or (27).
Theorem 2. The quadratic system described by (7) is bounded.
Proof. Consider System (7) and the linear matrix transformation defined by e = θz
where θ11, θ12, θ21 and θ22 are constants. Substituting Equation (13) into (7) the following system of differential equations is obtained
Where Θ1,...,Θ10 are parameters which depend on θ11, θ12, θ21, θ22, Q,
In order to accomplish this transformation, it is necessary to select Θ1 = 0, Θ2 = 0, Θ3 = 1, Θ6 = 0, Θ7 = - 1 and to solve the system of algebraic equations which result in
By replacing the coefficients (16) in (14), the parameters of system (15) are
Since Q>0 then a11<0 and therefore, according to Theorem 5, systems (15) and (7) are bounded.
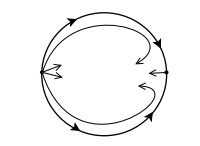
It should be noted that Theorem 2 ensures that system (7) is bounded for any configuration of finite and infinite equilibrium points. Figure 2 shows the equilibrium points at infinity in a saddle--node configuration, where the circle corresponds to the neighborhood of infinite.
4.2 Bounded quadratic systems with a unique real equilibrium point (BQS1)
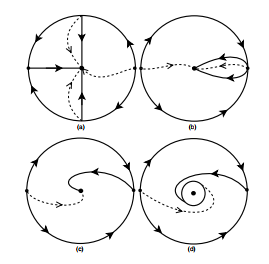
Theorem 6 of the appendix allows analyzing the different qualitative behaviours when there is a unique finite equilibrium point in a system of the type (27); and does so by means of phase diagrams, including both the finite equilibrium point as those at infinity. According to Theorem 6 there are four configurations, of which (a) and (b) cannot be used because system (7) is affine to a (27) type system, and these are mutually exclusive. Thus, system (7) may be of type (c) or (d). It will be shown that the only feasible configuration for (7) is (c).
Theorem 3.
Proof. According to Theorem 6(c) of the appendix, System (27) will have a unique equilibrium point if the following conditions are satisfied:
Theorem 2 allows to satisfy the condition (18)(i). For the second condition, substituting parameters (17) in (18)(ii) results.
Equation (19) is valid in the interval
The discriminant of f is
For the third condition, parameters (17) are substituted into Equation (18)(iii) which results in
Note that
Analogously, Theorem 2 proves that (21)(i) is valid; and the above analysis, in the interval
In summary, the set RL given in (12) defines the range within which system (7) is BQS1.
Corollary 2. Since (7) is a BQS1 type (c) system, it is globally stable.
Proof. Since (7) is BQS1 type (c), then there is a unique real equilibrium point to which all trajectories converge; that is, the system is globally stable.
Corollary 3. Since (7) is BQS1 type (c) system, then it has no limit cycles.
Proof. Since (7) is BQS1 type (c) and it cannot be represented as type (d), then there is no limit cycle or periodic solution.
5. QUALITATIVE ANALYSIS AROUND FINITE EQUILIBRIUM POINTS
System (7) will be analyzed locally with respect to its finite equilibrium points using the linearization method that is described in Dumortier et al. (2006), section 1.5.
The procedure consists of two steps; first the finite equilibrium point is obtained. Next, the Jacobian matrix associated with Equation (8) at this equilibrium point is evaluated. Thus the linearized version of the original nonlinear system is obtained. Equations (8) and (9) define the equilibrium equation and the determinant of Cardano
On the other hand, the eigenvalues of A are defined as
The local behaviour at the origin of coordinates may be interpreted using the following theorem.
Theorem 4. The origin of coordinates is an attractor.
Proof. The origin of the linearized system is an attractor, if the system possesses a unique equilibrium point and its eigenvalues are negative. This is accomplished with the following restrictions:
The above restrictions are satisfied for the following conditions on the parameter
These conditions are the same that define the set RL given in Equation (12).
In order to verify if the origin is a repeller, restriction (i) in addition to the following restrictions are used
It is easy to verify that there are not values of parameters that would make the origin to behave as a repeller.
To check if the origin of coordinates is a saddle, the restriction (i) and the following restriction are taken into account
There are not values of parameters that would make the origin to behave as a saddle.
To verify if the origin of coordinates is a center, the restriction (i) and the following restrictions are considered
From (vii) and (22) results Re{λ1,λ2}=0
There are not values of parameters that would make the origin to behave as a center.
Theorem 6 may be used to prove that the origin of coordinates, which is the unique real equilibrium point, can only be an attractor; and it is in the RL set defined in Equation (12). Also, the system is locally stable.
6. EXAMPLE 1
For simplicity the standard model (5) is used. For results in the original coordinates it is sufficient to apply the transformation matrix (2). Using equation (6) and errors
where the equilibrium points are evaluated using (4). Substituting (23) in the standard model (5), the closed-loop normalized converter dynamics is obtained
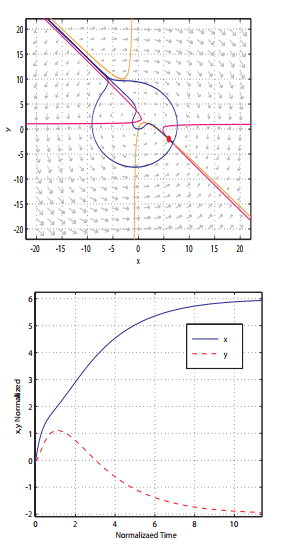
Here x(t) and y(t) correspond to the normalized variables inductor current and capacitor voltage, respectively. By selecting the values of the parameters Q=1, a=1, b=1,
In Figure 3a the phase diagram for the variables x,y is shown. The red dot indicates the coordinates
7. EXAMPLE 2
In order to visualize realistic effects on the Buck-Boost converter dynamics, the following example considers firstly the use of the average model equation (1), without including the switch and assuming that the input is defined in the continuous range u=[0, 1]. The simulation is performed in Mat Lab, with parameters C=50µF, L=500µH, R=10 ohms and E=10 volts. Figures 5a, 5b and 5c show the current in the inductor, the voltage in the capacitor and the control input. It is shown that with initial conditions i(0)=0 and v(0)=0 the trajectory converges to a single equilibrium (i,v)=(2,-10).
Note: in the average model Equation (1) the equilibrium point is placed in different coordinates of the origin (0,0).
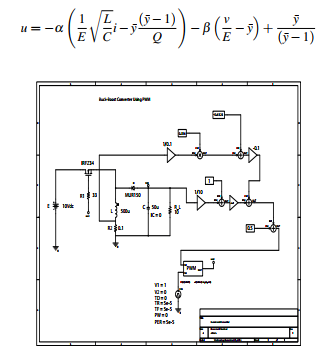
Now, the Buck-Boost converter is simulated using the Orcad-Pspice program to implement the circuit diagram shown in Figure 4. Mathematical models accurately approximate the behaviour of each of the elements that constitute the converter and in this case, a transistor and a diode operate as the discrete switch of the converter, so it is called a switch model. The characteristics that include the circuit diagram implemented with Orcad-Psice are the following: internal resistance of the inductor RL=0.1 ohm, transistor model IRFZ34, diode MUR150, pulse width modulator (PWM) at a frequency of 20 KHz; and the parameters were selected as C=50µF, L=500µH, R=10 ohms and E=10 volts. The control is ideally treated since it can be implemented by means of a microprocessor. Figures 5a, 5b and 5c show the behaviour of each of the variables of the switch model when the initial conditions are i(0)=0 and v(0)=0. The coordinates of the equilibrium point of the switch model correspond to (i, v) = (2,75, -8,5).
In both cases the non-normalized control took the form
The differences between the two models are due to the energy losses produced by semiconductors and conductors; i.e. the conductive voltage drops of the semiconductors and the internal resistance of the conductors and semiconductors. The results show the existence of a single equilibrium point.
8. ANALYSIS OF RESULTS
Table 1. Qualitative analysis results of System (7) with different techniques.
| Qualitative Analysis Technique | Bounded for any value of the parameters (BQS) | Bounded with a unique real equilibrium point (BQS1) |
|---|---|---|
| Lyapunov | Not shown if bounded | Globally Stable |
| Dickson–Perko | Bounded | Globally Stable |
| Linearization | Not shown if bounded | Locally Stable |
| Dickson–Perko and Linearization | Bounded | Globally Stable |
There have been used three techniques to study the qualitative behaviour of a second order nonlinear dynamic system. These techniques have corresponded to the direct method of Lyapunov, theorems of Dickson and Perko and the approximate linearization of nonlinear systems. In all three cases, the analysis has led to the same set where the parameters of the system were defined.

The results of the analysis performed with each of the techniques have been summarized in Table Table 1.
The direct method of Lyapunov allows to demonstrate global stability of System (7) but this does not allow demonstrating boundedness (BQS) for any variation of the parameters.
\item Theorems 5 and 6 of Dickson and Perko may be used to prove that System (7) is bounded (BQS), regardless of the values of its parameters.
It also demonstrates that when it exists there is a unique real equilibrium point (BQS1) the System (7) is globally stable and there are no limit cycles in its trajectories.
Approximate Linearization allows local analysis and provides no information on the overall behaviour of System (7) or its boundedness (BQS). It also demonstrate that when there is a unique real equilibrium point is an attractor and therefore the System (7) is locally stable.
If the Theorems of Dickson and Perko is using to demonstrate the boundedness feature (BQS) and unique equilibrium point existence. If the approximate linearization method is used then it can be concluded that System (7) is BQS1.
9. CONCLUSIONS
In this work an analysis of the behaviour of the trajectories around the equilibrium points of the Buck--Boost power converter with state vector feedback, using qualitative techniques for dynamic systems has been presented.
The closed loop system has a bifurcation of the equilibrium points. There may exist one, two or three points of finite equilibrium points. In the whole range of the parameters the system is bounded (BQS) for any configuration of finite equilibrium points and there are no limit cycles.
The direct method of Lyapunov can be used to ensure the system global stability. With the Theorems of Dickson and Perko a global qualitative behaviour of the system is obtained with a unique equilibrium point. Both cases provide conditions in the control parameters demonstrate that all trajectories converge to the unique equilibrium point.
Linearization around the origin of coordinates, where it is located the equilibrium point, facilitates establishing conditions on the control parameters to ensure that it is a local attractor.
The direct method of Lyapunov and the Theorems of Dickson and Perko allowed to obtain results on the general behaviour of the system, while the approximate Linearization only allowed to give local results where it is considered as global for the case study using the results of boundedness, together with the absence of limit cycles for the BQS1.
10. THEOREM OF DICKSON AND PERKO
Theorem 5. Any (BQS) is affinely equivalent to
with a11 < 0 and a22
with a11
with |c| < 2 and either (i) a11 < 0; (ii) a11 = 0 y a21 = 0; or (iii) a11 = 0, a21 6= 0, a12+a21 ≠ 0 and ca21+a22
Theorem 6. The phase portrait of any (BQS1) is determined by one of the separatrix configurations in Figure 6. Furthermore, the phase portrait of a quadratic system is given by Figure 6.
(a) iff the quadratic system is affinely equivalent to (25) with a11<0 and a22<0;
(b) iff the quadratic system is affinely equivalent to (26) with a11 < 2a22 < 0;
(c) iff the quadratic system is affinely equivalent to (26) with 2a22
(i) a11 = a22+a21 = 0, a21 ≠ 0 and a22 < min(0,-ca21) or a22 = 0 < -ca21,
(ii) a11 < 0, (a12-a21+ca11)2 < 4(a11a22-a21a12), and a11+a22
(iii) a11 < 0 y (a12-a21+ca11) = (a11a22-a21a12) = 0;
(d) iff the quadratic system is affinely equivalent to (27) with |c| < 2 and either
(i) a11 = a12+a21 = 0 and 0 < a22 < -ca21, or
(ii) a11 < 0,a11 + a22 > 0, and (a12 - a21 + ca11)2 < 4(a11a22-a21a12).