











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink1. INTRODUCCIÓN
El aumento de velocidades está relacionado con la gravedad de los accidentes y con un aumento de probabilidad de ocurrencia de accidentes de tránsito. La velocidad de operación se puede obtener mediante la recolección de velocidades de los vehículos cuando la calle está construida, mientras que cuando la calle está en proceso de diseño se deben usar ecuaciones de predicción. Si durante el diseño se conoce previamente la velocidad de operación, se podría reducir la brecha con la velocidad de diseño, y en caso de que eso no sea posible, se podría tomar medidas preventivas para reducir la velocidad y contribuir a la disminución de accidentes.
Esta velocidad de operación depende de varios factores tales como características de las calles, entorno de la calle, características del conductor y características del vehículo.
En las características de la calle, las principales variables que se han relacionado con la velocidad de operación es la longitud de la calle (Dinh y Kubota, 2013; Wang, 2006), el número de carrilles (Dinh y Kubota, 2013; Wang, 2006), el ancho de calzada (Dinh y Kubota, 2013; Bassani y Sacchi, 2012). Asímismo, el ancho de carril también fue estadisticamente significativo sobre la velocidad de operación (Poe y Mason, 2000; Bassani y Sacchi, 2012), sin embargo Wang (2006) no encontró esa relación. Por otro lado, el estado del pavimento fue un predictor de la velocidad de operación (Wang, 2006), aunque, otros autores no haya encontrado ninguna relación (Bassani y Sacchi, 2012).
En lo que respecta al entorno de la calle, los predictores más estudiados fueron: la presencia de acera (Dinh y Kubota, 2013; Wang, 2006), la densidad de accesos (Wang, 2006) y la densidad de objetos en zonas laterales como postes, árboles, señales de tránsito, etc. (Dinh y Kubota, 2013 y Wang, 2006). Asimismo, la presencia de estacionamiento también influyó sobre la velocidad (Wang, 2006), sin embargo, Bassani y Sacchi (2012) no encontró esa relación estadística. El uso de suelo tales como casas particulares, apartamentos y edificios altos, escuelas y parques, también han sido estudiado por Dinh y Kubota (2013), sin embargo, no tuvo una influencia significativa sobre la velocidad de operación para rectas urbanas. No obstante, Wang (2006) encontró que el uso del suelo fue una variable significativa que afecta a la velocidad de operación en zonas urbanas, en donde, los conductores tienden a conducir más rápido en calles residenciales con bajo volumen de tránsito vehicular que en calles comerciales con alto volumen de tránsito vehicular.
Las características del conductor fueron poco evaluados por las investigaciones anteriores, sin embargo, Wang (2006) encontró cierta influencia sobre la velocidad de operación, así como en Tarris et al. (1996). Por otro lado, García (2014) también encontró relación entre la velocidad máxima y ciertas relaciones de la personalidad y estilos de conducción en carreteras rurales, usando los cuestionarios MDSI-S (Taubman-Ben-Ari et al., 2004) y ZKPQ-50-cc (Aluja et al., 2006).
Existe muy poca información acerca de la influencia de los vehículos sobre la velocidad de operación. La mayoría de estudios se centró en vehículos livianos y no hacen referencia al modelo del vehículo o potencia del motor, etc., que podrían ser variables influyentes.
Con el uso de las variables relacionadas a las características de las calles, entorno de la calle, características del conductor se han desarrollado y calibrado varios modelos de velocidad, sin embargo, no se han estudiado en la realidad ecuatoriana. Ante ello, el objetivo general de ésta investigación fue calibrar modelos de velocidad para vehículos livianos en rectas urbanas previo a intersecciones no semaforizadas.
Para exponer los resultados se describe en la sección de materiales y métodos, el tamaño de la muestra, el sitio de medición, el equipo de medición, selección de conductores y tipos de vehículos. También se detalla la recolección y procesamiento de datos y el análisis de patrones de comportamiento de la velocidad. Luego, en la sección de resultados, se muestra la calibración de los modelos de velocidad, aceleración y desaceleración y su validación. Finalmente, se exponen las principales conclusiones.
2. MATERIALES Y MÉTODOS
2.1 Tamaño de la muestra
El tamaño de muestra se calculó en base a la Ecuación 1, sugerida por Pignataro (1973), que incluye el percentil de la velocidad que se va a calcular. En esta ecuación es necesario conocer la desviación estándar de las velocidades; dado que no se la tuvo al inicio de la investigación, se asumió una desviación de 13 km/h, la cual fue encontrada por Bennett (1994). Además, se adoptó un error de 5 km/h, dado que la recolección de datos se realizó con un equipo con GPS.
Donde:
n: tamaño de la muestra,
K: constante en base al nivel de confianza elegido,
σ: desviación estándar,
U: desviación normal correspondiente al percentil de velocidad deseado,
el: precisión o error máximo admisible
Con un nivel de confianza del 95% (K = 1,96) y para el percentil 85 de la velocidad (U = 1,04) se obtuvo un número mínimo de 40 observaciones, no obstante, en este estudio se recolectaron 45 observaciones.
2.2 Tramos de medición
Los tramos de medición se seleccionaron en base a los siguientes criterios: a) ser calles urbanas, b) no finalizar en una intersección con semáforo, c) pendiente longitudinales menores al 5%, d) no poseer características que puedan favorecer el aumento o reducción de velocidad de operación y e) permitir la circulación el flujo libre. En base a esos criterios se seleccionaron 13 calles en la ciudad de Loja (Ecuador), cuyas características se muestran en la Tabla 1. Con el fin de optimizar los recursos y para no influir significativamente en el comportamiento del conductor, los 13 tramos estuvieron incluidos en un circuito de 9,8 km.
2.3 Equipo de medición
Los conductores que participaron en esta investigación fueron resultado de un muestreo no probabilístico. Lo conductores debían cumplir con los siguientes requisitos: a) tener licencia de conducir vigente, b) poseer un vehículo liviano, c) conocer las calles de la ruta, y d) haber conducido frecuentemente en los últimos dos meses.
Tabla 1. Características de los tramos de estudio
| Tramo | Longitud de tramo (m) | Número de carriles | Ancho de calzada (m) | Ancho de carril (m) | Presencia de estacionamiento* | Presencia de Acera* | Sentido |
|---|---|---|---|---|---|---|---|
| 1 | 47 | 1 | 9,0 | 4,60 | 2 | 2 | unidireccional |
| 2 | 48 | 1 | 9,0 | 4,60 | 2 | 2 | unidireccional |
| 3 | 64 | 1 | 9,0 | 4,60 | 2 | 2 | unidireccional |
| 4 | 61 | 1 | 9,0 | 4,60 | 2 | 2 | unidireccional |
| 5 | 107 | 1 | 9,0 | 4,60 | 2 | 2 | unidireccional |
| 6 | 199 | 2 | 7,1 | 3,55 | 0 | 1 | unidireccional |
| 7 | 190 | 2 | 9,0 | 3,40 | 1 | 2 | bidireccional |
| 8 | 226 | 2 | 9,0 | 3,40 | 1 | 2 | bidireccional |
| 9 | 56 | 2 | 9,0 | 3,40 | 1 | 2 | bidireccional |
| 10 | 55 | 2 | 9,0 | 3,40 | 1 | 2 | bidireccional |
| 11 | 92 | 1 | 9,6 | 5,20 | 2 | 2 | unidireccional |
| 12 | 121 | 1 | 9,7 | 5,30 | 2 | 2 | unidireccional |
| 13 | 101 | 1 | 9,7 | 5,30 | 2 | 2 | unidireccional |
* 0: a ningún lado de la calle, 1: a un solo lado de la calle, 2: a ambos lados de la calle
En base a esas restricciones se eligieron 23 hombres y 22 mujeres, con el fin de estar acorde con el censo de la Provincia de Loja (INEN, 2010). En ese informe se señala que el 49.2% son hombres y el 50,8% son mujeres. Los conductores tuvieron una edad promedio de 30,5 años (mín = 21, máx = 60) y experiencia en la conducción de 9,3 años (mín = 1, máx = 40). Al final de los recorridos, los conductores respondieron dos encuestas: MDSI-S y ZKPQ-50-cc para estimar sus rasgos de personalidad y estilo de conducción, respectivamente; con el fin de que sean relacionados con su velocidad.
2.4 Tipo de vehículos
El 62% de los vehículos fueron de la marca Chevrolet y Hyundai. El 78% fueron autos y el 22% fueron camionetas. El año de fabricación promedio fue el 2008 (mín = 1994, máx = 2015), el cilindraje promedio fue de 1850 cm3 (mín = 1000, máx = 3700) y la última revisión promedio fue 52 días (mín = 15, máx = 140) antes del día de la recolección.
2.5 Recolección de datos de velocidad
Se recolectaron los datos de velocidad durante los fines de semana, con buenas condiciones climáticas, durante el día y fuera de las horas pico (14:00 a 18:00 horas) para asegurar que la mayor parte del recorrido sea en flujo libre. A todos los conductores se les indicó el funcionamiento del equipo de medición y uso posterior de la información. Para la recolección de los datos de velocidad se realizó el siguiente procedimiento: a) se instaló el equipo de medición en el vehículo, b) se encendió el equipo, c) se esperó que la conexión entre el equipo y los satélites sea buena, d) se indicó al conductor brevemente el circuito a seguir, e) durante el recorrido, se indicaba al conductor con anticipación hacia donde debía girar, y f) una vez que se finalizó el recorrido, se apagó el equipo de medición y se lo desmontó del vehículo.
2.6 Procesamiento de datos
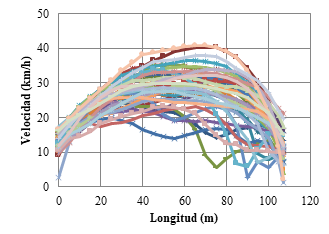
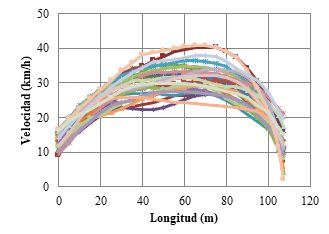
Se descargaron los recorridos del equipo al computador mediante el software Garmin Dash Cam Player, en donde, se convirtieron los archivos de video de tipo AVI del equipo a formato GPX. Estos archivos fueron visualizados y convertidos a texto por medio de la herramienta GPS Visualizer. Se exportaron cada segundo datos de posición, distancia, recorrida, distancia acumulada y velocidad en m/s. Con estas velocidades y la distancia, en cada uno de los tramos, se dibujaron los perfiles de velocidad. En cada calle se eliminaron los recorridos que no estaban en flujo libre, tal como se muestra, a manera de ejemplo, en la Figura 1 y 2. En la Figura 1 se muestran todos los perfiles de velocidad registrados en el tramo de estudio N° 5, luego en la Figura 2 se muestran sólo los perfiles de velocidad en donde los vehículos circularon a flujo libre, para ese mismo tramo.
En cada tramo se calculó el percentil 85 de la velocidad en la mitad de la calle, mientras que, para el cálculo de la aceleración y desaceleración se calculó la aceleración y desaceleración predominante mediante la siguiente ecuación:
Donde:
a: aceleración en m/s²,
Vf: velocidad final en Km/h,
Vi: velocidad inicial en Km/h,
d(i,i-1): distancia entre los puntos “i” e “i-1” en m.
Con esas aceleraciones y desaceleraciones individuales se calculó el percentil 85 de la aceleración y desaceleración en base a rangos de velocidad de 5 en 5 km/h.
Los conductores respondieron dos encuestas: ZQPK-50-cc, MDSI-S, ambas fueron probadas por García (2014). La encuesta ZQPK-50-cc cuenta con 50 preguntas relacionadas a la personalidad y evalúa cinco rasgos, cada uno con 10 preguntas. Estos rasgos son Agresión – Hostilidad, Impulsividad – Búsqueda de Sensaciones, Neurotismo – Ansiedad, Sociabilidad y Actividad. Las preguntas de esta encuesta se contestan con (V ó F).
La encuesta MDSI-S, de 41 preguntas, estima el estilo de conducción del conductor. Presenta seis estilos de conducción: estilo de riesgo y alta velocidad (9 preguntas), estilo disociativo (11 preguntas), estilo agresivo (6 preguntas), estilo cordial y prudente (6 preguntas), estilo ansioso (4 preguntas) y estilo de reducción de estrés (5 preguntas). Cada pregunta se valora de 1 a 6, siendo 1 un equivalente a nada y 6 un equivalente a mucho. Conociendo esto, se realizó la valoración de cada estilo.
De acuerdo a los resultados obtenidos, la mayoría de participantes tuvieron rasgos predominantes como la Impulsividad – Búsqueda de Sensaciones (44,4%) y Actividad (42,2%). Por otro lado, la mayoría de los conductores fueron del estilo Cordial y prudente (53,3%), Riesgo y Alta velocidad (26,7%).
2.7 Análisis de patrones de comportamiento
Se analizó la relación entre las variables independientes, encontradas en el estado del arte, y la velocidad, aceleración y desaceleración. Esta relación se analizó mediante el programa estadístico MINITAB 14.2 (Minitab, 2005). Las variables relacionadas al conductor y al vehículo no fueron estadísticamente significativas al 95% de confiabilidad. En la Tabla 2 se muestra el detalle de las relaciones obtenidas con las otras variables independientes.
De la Tabla 2 se puede decir que la velocidad es influida por la longitud de la calle y la presencia de estacionamiento, mientras que en la aceleración la longitud de la calle, el ancho de calzada, el uso del suelo, la presencia de estacionamiento, la presencia de acera y la velocidad inicial en la calle fueron las variables con una relación estadística significativa. Por otro lado, la desaceleración se relacionó con el número de carriles, ancho de carril y velocidad final en la calle. Todas estas variables fueron utilizadas en el proceso de calibración.
3. RESULTADOS
En base a las variables detectadas en la Tabla 2 se inició el proceso de calibración de modelos de velocidad, aceleración y desaceleración. Todos los modelos fueron análisis de regresión lineal, en donde se asumió una confiabilidad del 95%. Estas modelos fueron validadas usando otro circuito en la misma ciudad. Ésta validación consistió en el análisis de los errores de predicción mediante medidas estadísticas.
3.1 Calibración
Se calibró un modelo del percentil 85 de la velocidad (velocidad de operación), en donde, la variable independiente estadísticamente más significativa fue la longitud de la calle (p=0,000), con la cual se calibró del modelo que se muestra en la Tabla 3. Estos modelos son aplicables en calles que tengan una longitud de 47 m a 226 m. En la literatura, los modelos en ambientes urbanos han sido desarrollados para dos elementos principales: curvas o rectas.
Tabla 2. Cuadro de variables que influyeron sobre la velocidad, aceleración y desaceleración
| Variables | Velocidad de operación - V85 (km/h) | Percentil 85 de la aceleración - a85 (m/s2) | Percentil 85 de la desaceleración - d85 (m/s2) |
|---|---|---|---|
| Longitud de la calle (m) | x | x | - |
| Ancho de calzada (m) | - | x | - |
| Ancho de carril (m) | - | - | - |
| Uso del suelo | - | x | - |
| Número de carriles | - | - | x |
| Densidad de objetos (obj./100 m) | - | - | - |
| Presencia de estacionamiento | - | x | - |
| Presencia de acera | - | x | - |
| Velocidad inicial en la calle (km/h) | - | x | - |
| Velocidad final en la calle (km/h) | - | - | x |
| -: no fue estadísticamente significativo al 95% de confiabilidadx: estadísticamente significativo al 95% de confiabilidad | |||
Tabla 3. Ecuaciones calibradas de predicción de la velocidad
| Ecuación de predicción | R2 adj. | N° de ecuación |
|---|---|---|
|
|
0,94 | (3) |
|
|
0,86 | (4) |
|
|
0,83 | (5) |
|
| ||
En curvas, encontraron relación estadísticamente significativa con el grado de curvatura, (10 Tarris et. al, 1996; Poe y Mason, 2000), pendiente (Poe y Mason, 2000), ancho de carril (Poe y Mason, 2000; Wang, 2006), tasa de peligrosidad (Poe y Mason, 2000), número de carriles (Wang, 2006), densidad de accesos (Fitzpatrick et al., 2001; Wang, 2006), dirección de la curva (Wang, 2006), indicador de mediana, parqueadero o vereda (Wang, 2006), existencia de giros (Fitzpatrick et al., 2001), velocidad límite señalizada (Fitzpatrick et al., 2001) y uso del suelo (Fitzpatrick et al., 2001). Por otro lado, Fitzpatrick et al. (2001) también realizaron modelos para rectas urbanas usando la velocidad límite señalizada, densidad de accesos, existencia de giros y si la zona era escolar o residencial. Mientras que Wang (2006) realizó modelos para rectas con las variables: número de carriles, densidad de objetos laterales, densidad de accesos, densidad de intersecciones en T, presencia de bordillos, aceras o estacionamiento y uso del suelo. Cabe aclarar que aunque en esta investigación se analizaron la mayoría de esas variables, éstas no resultaron ser estadísticamente significativas al 95% de confiabilidad. La gran ventaja de los modelos propuestos de la Tabla 3 con respecto a los de las referencias, es su bajo mantenimiento, dado que poseen pocas variables independientes.
Por otro lado, también se calibró un modelo para el percentil 85 de la aceleración. Tres variables fueron estadísticamente significativas: la longitud de recta (p=0,006), uso del suelo (p=0,004) y velocidad inicial en la calle (p=0,000), sin embargo, esta última tuvo un coeficiente de determinación mayor. Con esta variable se calibró el modelo que se muestra en la Tabla 3. Esta ecuación es válida para velocidades iniciales entre 0 a 45 km/h.
Finalmente, en la desaceleración, tres variables fueron estadísticamente significativas: ancho de carril (p=0,048), número de carriles (p=0,034) y velocidad final en la calle (p=0,000). De estas, la velocidad final fue la que tuvo el coeficiente de determinación más alto, con la que se calibró el modelo del percentil 85 de la desaceleración. Este modelo también se muestra en la Tabla 3 y es aplicable a velocidades finales entre 0 a 45 km/h.
3.2 Validación
Los modelos calibrados de la Tabla 3 fueron validados con los datos recolectados en un nuevo circuito de medición de 6,8 km. Este circuito abarcó 8 tramos similares a los 13 usados en la calibración. La longitud de estos nuevos tramos estuvo entre 47 m a 112 m, número de carriles 1-2, ancho de calzada de 5,2 m a 9,0 m y ancho de carril 3,0 m a 4,8 m.
Participaron 6 conductores en el recorrido del circuito de validación, de los cuales 3 fueron hombres y 3 mujeres. Los conductores tuvieron una edad promedio de 26,3 años (mín = 25, máx = 28) y en experiencia en conducción de 7,2 años (mín = 5, máx = 9). Asimismo el 67% de los vehículos fueron de la marca Chevrolet y Hyundai. El 67% fueron autos y el 33% fueron camionetas. El año de fabricación promedio fue el 2007 (mín = 2004, máx = 2011), el cilindraje promedio fue de 2000 cm3 (mín = 1400, máx = 2700) y la última revisión promedio fue 53 días (mín = 30, máx = 90). Se empleó el mismo equipo de medición en el mismo horario que se recolectaron los datos para la validación. Se utilizó el mismo procesamiento de datos para la velocidad, aceleración y desaceleración, el cual fue descrito previamente.
Para la validación de los modelos de velocidad, aceleración y desaceleración se calcularon errores del pronóstico: error cuadrático medio (MSE), error absoluto de la media (MAE) y el error absoluto porcentual de la media (MAPE) y la prueba del Chi-Cuadrado. Estos valores se muestran en la Tabla 4.
Tabla 4. Errores de predicción y valores Chi-cuadrado para las ecuaciones de velocidad, aceleración y desaceleración
| Parámetros | Ecuación | ||
| V85 (3) | a85 (4) | d85 (5) | |
| MSE* | 3,83 | 0,02 | 0,01 |
| MAE** | 1,27 | 0,14 | 0,10 |
| MAPE (%) | 4,04 | 17,52 | 6,85 |
| χ² calculado | 0,95 | 0,13 | 0,05 |
| χ²5% crítico | 14,07 | 9,49 | 9,49 |
| * (km/h)² para la velocidad y (m/s2)² para la aceleración o desaceleración.** km/h para la velocidad y m/s2 para la aceleración o desaceleración. | |||
De las tres ecuaciones, la Ecuación (4) tiene los errores más altos, especialmente en el MAPE, sin embargo, el valor de chi-cuadrado calculado de las tres ecuaciones no sobrepasa al chi-cuadrado crítico, por lo tanto, las ecuaciones son válidas.
4. CONCLUSIONES
El objetivo de este artículo fue calibrar modelos de velocidad en calles rectas urbanas antes de intersecciones no semaforizadas. Estos modelos servirán para generar perfiles de velocidad en este tipo de calles. Luego del análisis de los resultados de esta investigación, se plantearon las siguientes conclusiones:
La longitud de recta fue la variable más influyente sobre la velocidad y tuvo una relación directamente proporcional, lo que significa, que a menor longitud menor velocidad y viceversa; sin embargo, existirán longitudes superiores, en las cuales la velocidad se mantendrá aproximadamente constante, esa velocidad se denomina velocidad deseada.
La velocidad al inicio de la calle fue la variable más influyente sobre la aceleración. Esa relación mostró que cuando la velocidad era más baja, la aceleración era más alta, dado que el conductor trata de recuperar la velocidad que llevaba antes de ingresar a esa calle; mientras, que cuando la velocidad era alta, el conductor aceleraba muy poco o no aceleraba. Estas maniobras fueron coherentes con lo observado en el campo.
La velocidad al final de la calle fue la variable más influyente sobre la desaceleración. Cuando el conductor deseaba llegar a velocidades más bajas al final de la intersección, la desaceleración fue más alta, mientras, que cuando se desea llegar a velocidades más altas, la desaceleración es más baja. Estas maniobras también fueron coherentes con lo observado en el campo.
Las variables relacionadas al vehículo y al entorno (tal y como se las ha tomado en esta investigación) no fueron estadísticamente significativas en la elección de la velocidad, aceleración y desaceleración.
Los rasgos de la personalidad y los estilos de conducción no fueron variables estadísticamente significativas sobre la velocidad, aceleración y desaceleración, lo que sugiere que son más importantes las condiciones de carretera y entorno (como un todo) que el deseo del conductor, sin embargo, para afirmar esto, es necesario investigaciones posteriores.
Para el cálculo del tamaño de la muestra se adoptó una desviación estándar de 13 km/h, sin embargo, la desviación estándar de este estudio fue de 5,7 km/h. Con esta desviación estándar y el tamaño muestral de 45, el error será de 2,1 km/h; menor a 5 km/h, cuyo valor fue asumido en esa misma estimación. Por otro lado, el error encontrado entre las ecuaciones de validación y calibración fue de 3,86 km/h fue también menor, por lo que, el tamaño muestral de este estudio para una confiabilidad del 95% fue el correcto.
Los modelos de predicción de velocidad pueden ser utilizadas para reducir la brecha entre la velocidad de operación con la velocidad de diseño durante el diseño de calles urbanas, o tomar medidas de seguridad vial para reducir esa variación.



