











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink1. INTRODUCCIÓN
La sociedad siempre ha prestado especial atención al estudio del clima debido a que es un factor muy importante para las personas y sus actividades cotidianas, mismas que pueden verse afectadas o favorecidas dependiendo de las condiciones climáticas.
Generalmente se trata de “predecir” el comportamiento del clima, a través de la medición de parámetros que generan información sobre las condiciones meteorológicas de un lugar, además con la ayuda de registros pasados se puede hacer un estimado de lo que podría suceder en las siguientes horas y así prever cualquier evento que pueda presentarse. Sin embargo el clima puede ser afectado por muchos factores y cambiar repentinamente, de ahí la dificultad de generar un pronóstico preciso (Fonseca, 1999).
Últimamente se han realizado muchos avances en el campo de la meteorología, contando con equipos sofisticados que recogen datos exactos de un lugar y permiten conocer el comportamiento del clima de una manera más acertada. Sin embargo los equipos que se utilizan generalmente son costosos y se encuentran en estaciones meteorológicas fijas de instituciones dedicadas al estudio del clima.
En el presente proyecto se desarrolla una solución que permite obtener datos meteorológicos de una zona en estudio con equipos modernos, se utiliza un dron adaptado con tarjetas electrónicas y sensores, para realizar mediciones meteorológicas durante el sobrevuelo del lugar. Los datos obtenidos se transmiten inalámbricamente hacia otras tarjetas electrónicas en tierra que almacenan y presentan dichos datos.
Proyectos como: Monitoring of CCS Areas using Micro Unmanned Aerial Vehicles (MUAVs) (Neumann et al. 2013) que estudia las emisiones de carbono en la atmósfera y High-Resolution Atmospheric Sensing of Multiple Atmospheric Variables Using the DataHawk Small Airborne Measurement System (Lawrence y Balsley, 2013) que realiza mediciones meteorológicas en el ambiente, han despertado el interés para la investigación en este campo. Aunque a nivel internacional ya se ha planteado el uso de UAVs para medición de parámetros meteorológicos, en el Ecuador este procedimiento es innovador, siendo el punto de partida para generar pronósticos del tiempo en el futuro próximo, además de la investigación de “siembra de nubes”.
2. MARCO TEÓRICO
2.1. Trabajos Relacionados
La utilidad de los drones ha permitido desarrollar varias aplicaciones en el campo de la investigación meteorológica. Los trabajos más relevantes se enfocan al monitoreo de la atmósfera, además del acoplamiento de sensores a UAVs (Baxter y Bush, 2014).
Se han podido realizar estudios sobre emisiones de carbono en las capas bajas de la atmósfera gracias a sensores y dispositivos adaptados en drones de uso civil (Villa et al. 2016), los resultados obtenidos han permitido conocer específicamente los niveles de contaminación y el impacto ambiental que generan gases como el CO2 actualmente. Los equipos utilizados para tal efecto son sensores de luz, detección de luz y sensores de control de calidad del aire.
Siguiendo la misma línea, se ha podido realizar un monitoreo del CO2 en la atmósfera con la ayuda de micro drones (Neumann et al. 2013), los sensores utilizados permiten apreciar la concentración y distribución del CO2 mediante vistas en infrarrojo en alturas relativamente pequeñas.
Uno de los principales usos en meteorología de los drones es la medición de parámetros meteorológicos con sensores destinados a esta labor (Lawrence y Balsley, 2013). Mismos que se acoplan tomando en cuenta sus condiciones de uso y operación. La principal consideración para este tipo de equipos es la velocidad de vuelo del dron (pocos m/s), la altura y el sitio en estudio. Los parámetros estudiados son: humedad, temperatura, presión, velocidad y dirección del viento.
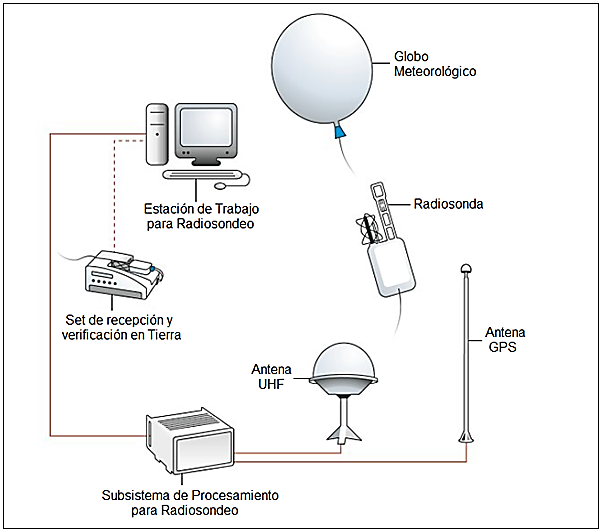
2.2. Radiosonda
Es un dispositivo electrónico de tamaño reducido que permite realizar mediciones de parámetros meteorológicos a diferentes alturas en la atmósfera, se compone de un transmisor de Radiofrecuencia (RF) junto con sensores de presión, humedad y temperatura, además de una antena GPS para conocer las coordenadas geográficas del dron.
Las radiosondas generalmente son lanzadas en globos meteorológicos inflados con gases ligeros como Helio o Hidrógeno, permitiendo tomar datos a una gran altitud y posteriormente transmitirlos a una estación terrestre que se encarga de recibir, monitorear y analizar la información. La frecuencia específica dispuesta por la Organización Meteorológica Mundial (OMM) para realizar un radiosondeo es de 403.0 MHz (González, 2015).
2.2.1. Sistema de Monitoreo
Un sistema completo para monitoreo consta de: una radiosonda, antenas de recepción (UHF y GPS), un equipo decodificador fijo en Tierra y una estación de trabajo para el procesamiento de la información, como se muestra en la Figura 1.
2.3. Georreferenciación
Es el proceso mediante el cual se asigna una localización geográfica única a un objeto, con el fin de posicionarlo tanto espacial como temporalmente en un sistema de coordenadas específico (mapa).
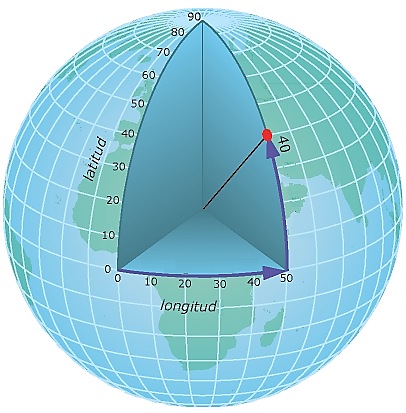
2.3.1 Sistemas de Coordenadas Geográficas
Se caracteriza por identificar un sitio mediante mediciones esféricas de latitud y longitud geográfica (Méndez, 2003), es decir se miden los ángulos desde el centro del planeta hasta un punto en la superficie del mismo, este sistema de referencia se expresa generalmente en grados sexagesimales. Su formato es: “grados, minutos, segundos” (º ‘ “). En la Figura 2 se muestra el ejemplo de un sistema de coordenadas geográficas.
3. HARDWARE Y SOFTWARE
El prototipo que se desarrolla en el proyecto está compuesto de dos sistemas principales: el primero es un sistema aéreo que permite la adquisición, almacenamiento y transmisión de datos meteorológicos georreferenciados, mientras que el segundo es un sistema en tierra para recepción, procesamiento y almacenamiento de dicha información para su posterior análisis
3.1. Requerimientos del Sistema
En la primera etapa del proyecto se debe realizar la adquisición y transmisión de la información meteorológica de una zona en estudio. Para ello es necesario contar con los siguientes dispositivos:
Dron: vehículo para desplazar el sistema móvil.
Bloque de Procesamiento: procesa la información recopilada por los sensores.
Sensores Meteorológicos: realizan las mediciones meteorológicas con gran precisión.
Dispositivo GPS: proporciona la posición geográfica del lugar donde se realiza el estudio meteorológico.
Tarjeta de Transmisión Inalámbrica: permite la comunicación entre el sistema aéreo y el sistema en tierra.
La segunda etapa del proyecto consiste en el procesamiento de la información meteorológica y su posterior almacenamiento, para cumplir dicho objetivo es necesario contar con los siguientes elementos:
3.2. Equipo Utilizado
El vehículo que permite el desplazamiento del sistema móvil por el aire es el Dron DJI Phantom 3 Standard. Luego de realizar un análisis de las plataformas de hardware libre presentes en el mercado como: Arduino Yún, Beaglebone Black, Intel Galileo y Raspberry Pi; se elige a esta última, como placa base del proyecto por tener mejor rendimiento, conectividad, precio y procesamiento.
Los sensores de parámetros meteorológicos DHT22 (humedad, temperatura) y BMP180 (presión, temperatura) se eligen para realizar las mediciones. El dispositivo GPS (GY-GPS6MV2) permite conocer la posición geográfica donde se realiza la adquisición de datos. Para la transmisión y recepción de información de manera inalámbrica se utiliza la tecnología ZigBee con la utilización de dispositivos XBee Pro S1 con un alcance importante (1 600 m).
3.2.1. DJI Phantom 3 Standard
El dron Phantom 3 Standard es un vehículo aéreo no tripulado fabricado por la compañía DJI que cuenta con un control remoto personalizado además de una cámara de alta calidad. Sus principales características son:
3.2.2. Raspberry Pi 2B
Es un computador de tamaño reducido fabricado en el Reino Unido, posee un potente procesador (900 MHz) capaz de reproducir video en Alta Definición y de ejecutar cualquier tipo de aplicaciones que un computador convencional realizaría, con la ventaja de ser muy económico, con un consumo de energía bajo. Presenta las siguientes características:
3.2.3. Sensor DHT22
Es un sensor de humedad y temperatura de precisión compuesto por tres elementos principales: un sensor de humedad capacitivo, un termisor y un circuito integrado básico en su interior que realiza la conversión análogo-digital de los datos medidos y devuelve una señal digital por medio de un pin de salida de datos. Sus características son:
3.2.4. Sensor BMP180
Es un sensor de presión barométrica, altitud y temperatura con bajo consumo de energía, linealidad, estabilidad a largo plazo, tamaño reducido y precisión. Utiliza la interfaz I2C para la comunicación con otros dispositivos. El BMP180 genera mediciones muy precisas porque viene calibrado de fábrica. Sus principales características son:
3.2.5. Dispositivo GY-GPS6MV2
Es un receptor de GPS que presenta el chip NEO-6M incorporado en una placa electrónica junto con una pila, circuitos de regulación y LEDs intermitentes que se activan cuando el dispositivo logra la comunicación y recibe la señal GPS, presenta las siguientes características:
3.2.6. Dispositivo XBee Pro S1
El XBee Pro S1 es un dispositivo de tecnología ZigBee, da la posibilidad de tener comunicación analógica y digital, siendo esta última la de mayor uso y potencialidad del dispositivo. Es un equipo que puede transmitir y recibir información, a gran distancia, sus características son:
4. IMPLEMENTACIÓN DEL SISTEMA
El prototipo que se implementa consta de dos partes: el sistema móvil y sistema fijo, como se muestra en la Figura 3.
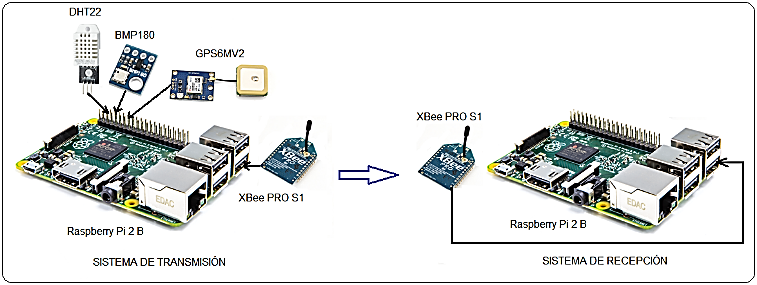
4.1. Implementación del Sistema Aéreo Móvil
El sistema aéreo móvil consta de: Raspberry Pi 2B, sensor DHT22, sensor BMP180, GPS GY-GPS6MV2 y XBee Pro S1 de transmisión. Dicho sistema genera información consolidada cada minuto, el proceso de adquisición de datos se muestra en la Tabla 1.
Tabla 1. Adquisición de información del sistema móvil
| Parámetro | Tiempo de adquisición | Equipo de medición |
|---|---|---|
| Temperatura | 1 Dato cada 20 segundos | Sensor DHT22 y BMP180 |
| Humedad | 1 Dato cada 20 segundos | Sensor BMP180 |
| Presión | 1 Dato cada minuto | Sensor DHT22 |
| Latitud | 1 Dato cada minuto | GPS |
| Logitud | 1 Dato cada minuto | GPS |
| Altitud | 1 Dato cada minuto | GPS y Sensor BMP180 |
| Hora | 1 Dato cada minuto | GPS |
| Fecha | 1 Dato cada minuto | Raspberry Pi |
El dron inicialmente es dirigido a un sitio determinado, se mantiene estático mientras capta la información y una vez recibidos dichos datos se procede a moverlo a otra posición.
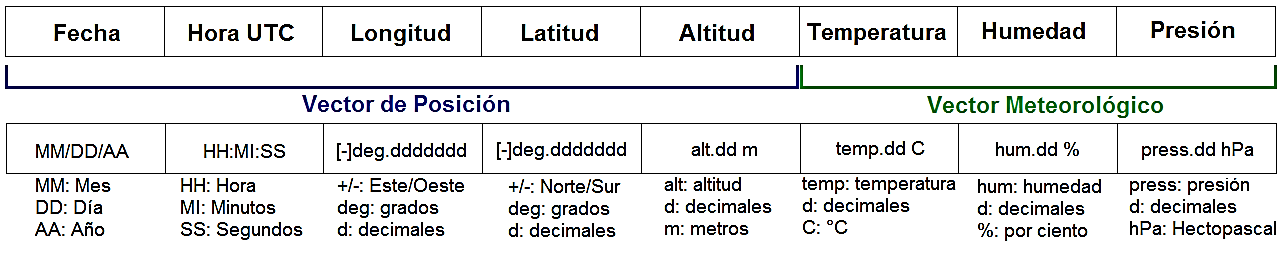
4.1.1. Vector de Información
Para el envío y almacenamiento de información cada minuto se utiliza un vector con 8 campos separados por coma. Los vectores permiten operaciones entre sí, algo muy útil en este proyecto ya que el vector final que se envía por el puerto serial es el resultado de la unión de un vector de posición (5 campos) con un vector meteorológico (3 campos).
En la Figura 4 se muestra el vector de información, con su estructura y formato
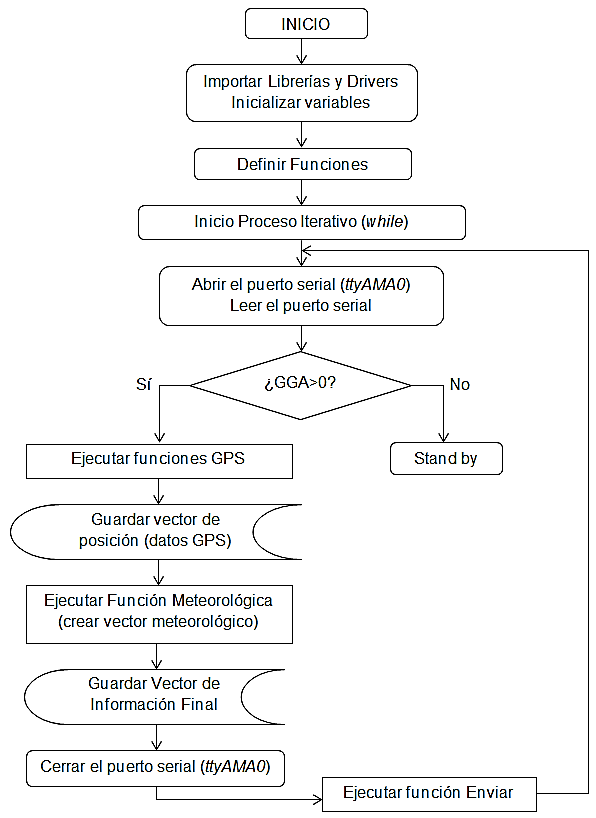
4.1.2. Script de Transmisión
El script para la transmisión de datos se compone de tres partes principales: la recepción GPS, la medición meteorológica y la transmisión inalámbrica. Luego de declarar librerías y definir variables, se procede a crear y guardar el vector de posición con ayuda del script de recepción GPS, posteriormente se crea el vector meteorológico con valores promedio, finalmente se unen ambos vectores en uno sólo y se envía a través del puerto serial por el dispositivo XBee hacia el sistema de recepción en tierra. El código en Python se detalla en el diagrama de flujo representado en la Figura 5.
4.1.3. Consumo del sistema móvil
El consumo de corriente del sistema aéreo móvil se detalla en la Tabla 2.
4.1.5. Diseño del prototipo para transmisión
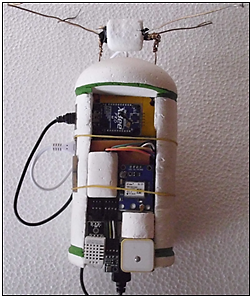
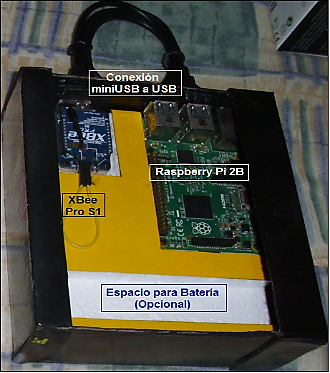
El prototipo del sistema móvil está realizado en base a espuma flex para proteger a los dispositivos. Los sensores están descubiertos con el fin de evitar que se generen microclimas en el proceso de medición y afecten los resultados. También se incorpora la batería de alimentación y un circuito para conectar los sensores con los pines GPIO de la Raspberry Pi 2B. El peso del prototipo desarrollado es de 245 gramos.
La construcción del sistema es vertical con el fin de concentrar el centro de masa en el lugar exacto donde el dron no sufre carga hacia ninguno de sus motores, haciendo que el sistema se desplace con facilidad en el aire. La Figura 6 muestra el prototipo diseñado.
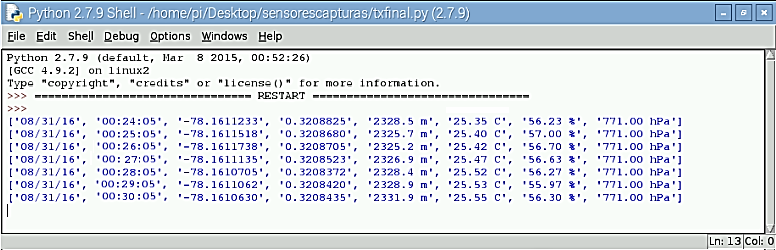
4.1.6. Funcionamiento del Sistema
El funcionamiento del sistema móvil puede ser comprobado en el intérprete de Python, donde se aprecian los datos obtenidos, como se muestra en la Figura 7.
4.2. Implementación del Sistema Fijo
El sistema de recepción y almacenamiento de datos se encuentra fijo en tierra, consta de una Raspberry Pi 2B y un XBee Pro S1, no necesita de una fuente de energía externa porque es un sistema de monitoreo en tiempo real que verifica permanentemente el funcionamiento del sistema completo sin necesidad de moverse. Su principal objetivo es captar la información originada en el sistema aéreo móvil y almacenarla en archivos de texto.
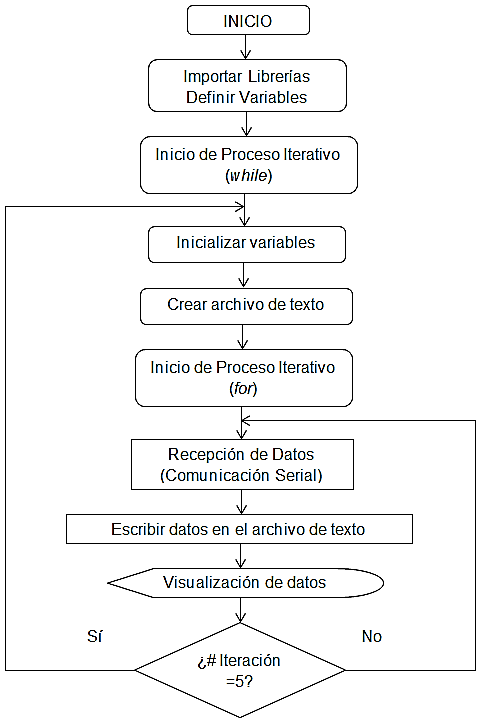
4.2.1. Script de Recepción
El script que se implementa en el sistema de recepción consta de dos procesos iterativos: while y for, el primero se utiliza con la condición True para que ejecute constantemente las funciones de lectura y escritura de datos durante el tiempo que sobrevuela el sistema aéreo móvil. El segundo proceso es esencial para la creación de archivos de texto con cinco datos cada uno. El código en Python se detalla en el diagrama de flujo representado en la Figura 8.
4.2.2. Diseño del prototipo para recepción
El prototipo del sistema en tierra no tiene lineamientos específicos de construcción ya que es un equipo fijo, sin embargo se ha optado por diseñarlo con características similares al sistema móvil, en base a espuma flex y cartón, con facilidades de conexión y sobre todo en un espacio reducido. La Figura 9 muestra el prototipo diseñado.
5. PRUEBAS Y ANÁLISIS DE RESULTADOS
El sistema completo es probado primero en tierra y posteriormente con el desplazamiento del sistema móvil es posible verificar el funcionamiento real del prototipo.
5.1. Pruebas Preliminares
Luego de energizar ambos sistemas, es necesario ejecutar el script del sistema de adquisición, comprobar que envíe información y posteriormente ejecutar el script para recepción. En vista que las mediciones se realizan en tierra, la altitud tiene variación mínima al igual que la presión. Los valores de humedad y temperatura varían dependiendo del lugar que sean tomados.
Como resultado de las mediciones realizadas en tierra se obtienen varios archivos de texto con información meteorológica, la Figura 10 muestra el primero de ellos

Tras verificar el funcionamiento correcto de todo el equipo, se obtuvo información hasta cuando ambos sistemas se separaron 210 metros aproximadamente, en línea recta.
5.2. Pruebas Finales
La zona del volcán Pululahua se caracteriza por ser húmeda, debido a la presencia del bosque húmedo característico de la reserva geobotánica Pululahua. Esta zona ha sido seleccionada como parte del análisis del proyecto “Implementación de un sistema piloto que permita la geolocalización de zonas con mejores características meteorológicas para la generación artificial de nubes (Caso de estudio zona norte del Distrito Metropolitano de Quito).”
5.2.1. Consideraciones previas
Una vez en el lugar, es necesario verificar el estado de los equipos, realizar las conexiones correspondientes y solucionar imprevistos en caso de existir. La etapa de comprobación es exitosa cuando se sigue el proceso que a continuación se detalla:
Armar y calibrar el dron.
Conectar y encender el sistema de transmisión.
Conectar y encender el sistema de recepción.
Esperar a que el GPS reciba información (LED azul intermitente).
Ejecutar el programa de transmisión en Python.
Verificar latitud del lugar.
Ejecutar el programa de recepción en Python (según latitud).
Verificar la recepción de datos.
Adaptar el sistema de adquisición al dron.
Encender el dron para el despegue.
En la Figura 11 se aprecia el sistema aéreo móvil listo para iniciar el sobrevuelo.

5.2.2. Mediciones Meteorológicas
Cuando se tiene constancia que el sistema se encuentra funcionando correctamente, se procede a adaptar el sistema al dron para el despegue. Cuando el sistema despega no se aprecian dificultades ni anomalías, por lo tanto las mediciones pueden ser realizadas con normalidad. La adquisición de información meteorológica debe seguir el siguiente proceso:
Dirigir el dron hacia un lugar específico.
Mantener estático el sistema durante un minuto hasta que se tomen todos los datos.
Esperar que el sistema en tierra reciba la información.
Mover el dron hacia otro lugar para tomar nuevos datos.
Continuar con las mediciones mientras el dron no genere alertas.
En caso de presentarse una alerta de batería baja (30% de carga), por seguridad se debe regresar inmediatamente el sistema a tierra.
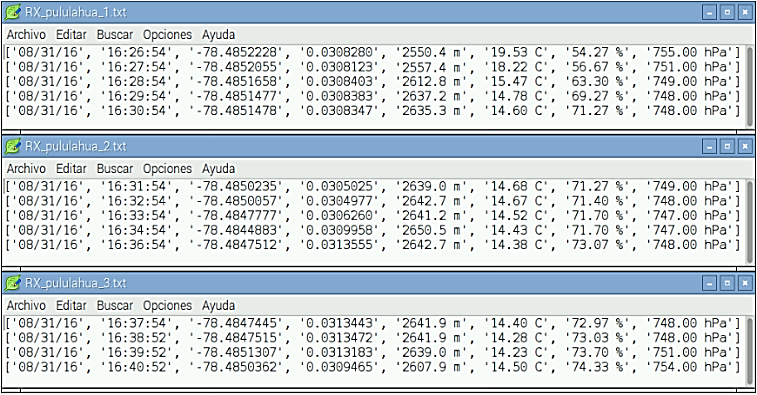
En el proyecto se pudo comprobar que el dron funciona con normalidad aproximadamente 15 minutos sin alarmas (cambio de batería del dron). Por tal motivo, se generan tres archivos de texto con información meteorológica capturada en el sobrevuelo.
5.3. Análisis de Resultados
Resulta difícil realizar la comparación de las mediciones del prototipo y una estación meteorológica móvil, debido al costo de un sistema de radiosonda. Solamente se puede comparar en la superficie, más no en altura.
Con el fin de investigar el comportamiento del sistema en sus límites se llevó al sistema hasta una altura máxima de 120 metros, observando que funciona con normalidad incluso en esas circunstancias. No se alcanzaron alturas superiores por seguridad ya que la normativa de la DAC no lo permite, además que el fabricante del dron garantiza su funcionamiento normal hasta ese límite.
De la información almacenada en los archivos de texto (Figura 12) se puede conocer el comportamiento de la humedad, presión y temperatura en función de la altitud, durante el proceso de adquisición de información meteorológica.
5.3.1. Efecto producido por las Hélices del Dron
El efecto que producen las hélices del dron y su empuje sobre el sistema de adquisición de datos no es de consideración cuando se utiliza un esquema vertical como el implementado en el proyecto.
Yoon, Chan y Pulliam, (2017), demostraron por medio de un simulador que la parte inferior del dron no se ve afectada gravemente por la turbulencia generada por las hélices del UAV ya que el flujo de aire pierde fuerza en su centro. Las zonas de mayor turbulencia presentes en un dron se pueden apreciar en la Figura 13:

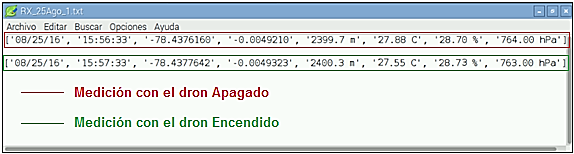
Para comprobar la validez de las mediciones se realizaron pruebas iniciales con el dron apagado y luego encendido, verificando que las mediciones no se alteran en lo absoluto, dicha comparación se detalla en la Figura 14.
5.3.1. Comportamiento de la Temperatura
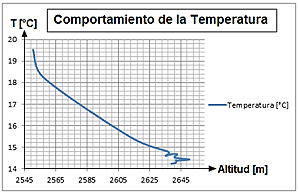
El comportamiento de la temperatura en función de la altitud permite conocer el gradiente térmico de la zona en estudio. La información de temperatura varía a razón de -1°C/20m cuando el sistema móvil asciende, en este caso llega a disminuir hasta 5°C respecto al valor medido en tierra. La Figura 15 muestra el comportamiento de la temperatura en función de la altitud.
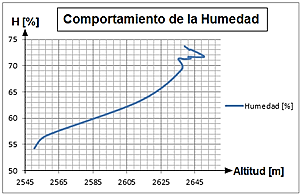
5.3.2. Comportamiento de la Humedad
Las pruebas se realizaron en una zona húmeda con algo de nubosidad, notando la presencia de pequeñas gotitas de agua en el ambiente, generando valores de humedad cercanos al 80% que aumentan con la altitud a razón de 4%/25m. La Figura 16 muestra la humedad en función de la altitud registrada en el sobrevuelo.
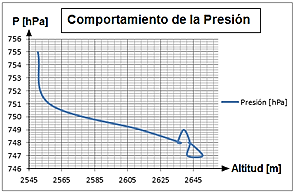
5.3.3. Comportamiento de la Presión
La presión a su vez varía inversamente con la altitud, a medida que el sistema aéreo móvil se aleja de la superficie, dicha variación es de -2hPa/25m, este comportamiento se conocía teóricamente y con la realización de las pruebas pudo comprobarse. La Figura 17 muestra dicho comportamiento.
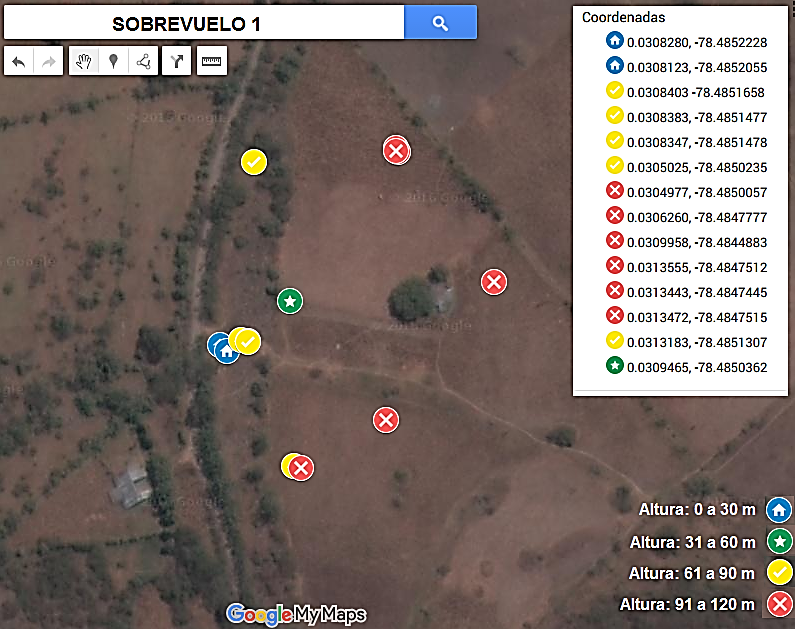
5.3.4. Cobertura
La comunicación inalámbrica realizada entre los dispositivos XBee Pro S1 es exitosa, ya que en campo abierto no se necesita que sus antenas se encuentren apuntando directamente, esto fue comprobado visualmente puesto que en ocasiones la antena del sistema transmisor apuntaba en la dirección opuesta al sistema de recepción sin embargo la información llegó con normalidad.
El área geográfica estudiada por el sistema es de aproximadamente 1,76 hectáreas. (17549 m²). La Figura 18 muestra el área de cobertura y las diferentes alturas alcanzadas en el sobrevuelo.
6. CONCLUSIONES
El efecto que producen las hélices del dron se minimiza al contar con un diseño que aísla los sensores y los posiciona en la parte más alejada posible (40cm respecto al plano de las hélices). De esta forma los sensores interactúan directamente con el ambiente y las mediciones son reales.
El prototipo implementado es el primero de su tipo en el Ecuador, técnicamente es una radiosonda de 245 gramos construida con dispositivos que se encuentran fácilmente, el sistema móvil presenta una autonomía de hasta 4 horas debido a que su consumo de corriente es muy bajo (1253.15 mA), con una altura máxima del sistema de 120 m y 1600 m de alcance.
La posición geográfica que entrega el GPS (GY-GPS6MV2) tiene un grado de precisión adecuado, aunque siempre se tiene un error absoluto de entre 20 y 30 metros en equipos comerciales, las mediciones realizadas en tierra con este dispositivo permitieron verificar que al mover el GPS unos pocos metros, la información recibida permitía apreciar dicho cambio de posición.
La tasa de bits para la comunicación RaspberryPi-GPS es de 9600 baudios, mientras que los XBee Pro trabajan a 115200 baudios, dichas velocidades son las que recomiendan los fabricantes para no tener problemas en comunicación, sin que existan errores de sincronismo o pérdida de información.
La información almacenada en los archivos de texto permite conocer el comportamiento de los parámetros meteorológicos (presión, humedad y temperatura) a medida que se alejan de la superficie. La temperatura y presión disminuyen con la altitud en -1°C/20m y -2hPa/25m respectivamente, mientras que la humedad aumenta en función del mismo parámetro en 4%/25m, comprobando los argumentos de Sendiña y Pérez, (2006).
El prototipo puede ser mejorado en el futuro, implementando un sistema de telemetría que permita conocer en tiempo real el estado de los diferentes sensores, además de dar la posibilidad de automatizar el sistema para captar información meteorológica de acuerdo a las necesidades que el proyecto demande.





