











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
El uso de cargas no lineales en aplicaciones industriales, comerciales y domésticas, alteran la calidad de la energía. Estas producen inconvenientes en la red eléctrica como sobrecargas en equipos eléctricos, envejecimiento prematuro en máquinas eléctricas, entre otros [1]. El incremento de cargas no lineales y la múltiple integración de fuentes de energía en la red, aumenta la probabilidad de perturbación en la corriente, voltaje y frecuencia de la red, afectando los parámetros de operación normal del sistema[2].
Dado estos inconvenientes se han planteado posibles soluciones y una de ellas es la compensación a través del compensador síncrono estático de distribución (D-STATCOM). El D- STATCOM es el dispositivo de compensación más utilizado en los sistemas de distribución para resolver problemas de calidad de energía [2]. Este dispositivo es capaz de inyectar dinámicamente una corriente de compensación con la amplitud, frecuencia y fase deseada en cualquier nodo de la red de distribución eléctrica [3][4].
Existen varias técnicas de control para el D-STATCOM como la teoría del marco de referencia síncrono (SRF) o la teoría de la potencia reactiva instantánea (IRP), que la presenta el autor en el artículo de investigación [5] como alternativa para la compensación reactiva, el desequilibrio, la reducción de la distorsión armónica total y el mejoramiento del factor de potencia del sistema.
Los inversores multinivel (MLI) han ganado espacio en las topologías empleadas para el funcionamiento del D-STATCOM, ya que éste brinda la posibilidad de reducir el contenido armónico a partir de los diversos niveles de voltaje DC de cada entrada [6].
Los autores del artículo [7] proponen la mitigación de la distorsión armónica total (THD) producida por una carga no lineal, a través del inversor multinivel de tres niveles en cascada. Se propone una estrategia basada en la teoría del SRF y D-STATCOM. Para la simulación del MLI D-STATCOM se utilizó MATLAB/SIMULINK. Las simulaciones muestran el diseño del MLI D-STATCOM y se analiza los resultados en términos de formas de ondas de corriente, voltaje y la THD.
El artículo está organizado de la siguiente forma. En el capítulo 2 está la metodología propuesta. Mientras en el capítulo 3 se presente el análisis y la discusión de resultados. Y finalmente en el capítulo 4 están las conclusiones de la presente investigación.
METODOLOGÍA
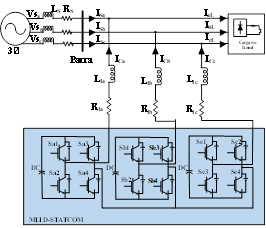
La topología empleada para el inversor multinivel basa su estructura en puentes H monofásicos en cascada con fuentes separadas por cada celda implementadas para cada fase [8][9]. La estructura con CHB (Cascaded H Bridge) de tres niveles que actúa como VSC (Volage Source Inverter) de un D-STATCOM. La misma que consta de tres salidas niveladas (+Vcc, 0, -Vcc) con un puente H conectado en cascada a través de una impedancia de acoplamiento por cada fase en derivación. El número de celdas (C) de CHB-MLI por cada fase que requiere el compensador, está determinado por cada nivel de conmutación (m) del HCB, representado por la ecuación (1) [10]. Mientras que la determinación del número de niveles de voltaje (k) de salida es establecida por el n, en la ecuación (2). Es decir que con un puente H por cada fase se puede establecer un inversor en cascada de 3 niveles.


Para mejorar la calidad se puede conectar varios puentes H en cascada, lo cual sintetiza el voltaje deseado de varias fuentes DC separadas. SRF es conocida también como técnica de transformación dq0, es uno de los métodos de control más eficientes para la supresión de los armónicos de voltaje y de corriente; esta técnica rige su funcionamiento en la transformada de Park [11].
La técnica que utiliza el control SRF es generar vectores unitarios a partir del voltaje de suministro, transfiriendo las corrientes distorsionadas (coordenadas a-b-c) a las coordenadas del marco de referencia síncrono de dos fases (dq0), utilizando las funciones seno y cosenos del bucle de bloqueo de fase (PLL) [3].
El PLL es el encargado de mantener la sincronización del convertidor con el voltaje de línea y la corriente de alimentación; además proporciona el ángulo de fase síncrono para el bloque de transformación midiendo la frecuencia del sistema [12]. Adicionalmente, la técnica de trasformación dq0 cambia de manera exacta señales sinusoidales a señales constantes. De esta manera, resultan modelos dinámicos relativamente simples para modelar y analizar fenómenos transitorios rápidos, que se encuentran en los sistemas de potencia [27].
El MLI D-STATCOM propuesto en la Fig. 1. En la estructura se conecta a cada fase una inductancia de acoplamiento, donde VSa, VSb, VSc son los voltajes de fase de la fuente, y las corrientes de derivación de la carga por cada fase son ILa, ILb, ILc respetivamente [6] [8] [10][13].
El incremento progresivo de cargas eléctricas permite encontrar estrategias para mejorar la calidad del suministro eléctrico y de esta manera satisfacer la demanda de energía eléctrica requerida[4]. Sabiendo que, hoy en día una gran cantidad de demanda son producidas por las cargas no lineales, estas cargas son las principales fuentes de armónicos que distorsionan la forma de onda de corriente sinusoidal habitual [14] [15]. La compensación tipo D-STATCOM puede evitar los efectos contraproducentes que se genera por la aparición de los armónicos, disminuyendo el THD de corriente, THDi, en la red eléctrica.
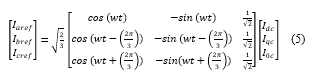
Para el estudio se eligió una topología MLI de tres niveles, esto quiere decir que existe un puente H y un capacitor para cada fase, por tanto, hay tres capacitores en total en cada puente H en cascada. Es por eso que, para equilibrar los voltajes de los condensadores en DC, durante toda su operación, se adiciona el controlador proporcional integral (PI) y de esta manera se pueda distribuir la potencia activa entre todos los puentes H para compensar las pérdidas de energía (I𝐷𝑙o𝑠𝑠), mostrada en la Ecuación (4) [6][13]. Los controladores PI implementados tienen los mismos valores de ganancia proporcional (𝐾𝑝) y ganancia integral (𝐾i) para que el voltaje del capacitor sea igual al valor de voltaje de referencia del enlace DC [16]. En el control basado en marco de referencia síncrono se encuentra las corrientes de carga en coordenadas abc, las cuales se transforman en coordenadas dq0, por medio de la Ecuación (5).

El voltaje de punto de acople común (PCC) son sincronizadas con la señal trifásica del PLL. El filtro pasa bajos extrae las componentes Id e Iq. En el controlador PI encuentra la diferencia entre el voltaje de salida (Vdc) y el voltaje de referencia del condensador (Vdc_ref), que está asociado al factor d, de las corrientes de cargas Id para obtener Idc [17][18].
Para obtener Iqc se agrega la componente “q” de la corriente de carga Iq por medio de la diferencia entre la amplitud de voltaje del terminal de carga y el valor de referencia que se alimenta al controlador PI [13][19]. Con el fin de mantener una compensación adecuada, resulta conveniente mantener constante el voltaje del enlace DC, además de que el controlador PI compensa las pérdidas de corriente activa utilizando los valores de ganancia [20]. Las componentes encontradas (Idc, Iqc) se convierten en componentes abc por medio de la transformación de Park. El voltaje de referencia de los terminales PCC se comparan entre el voltaje del terminal de referencia y el voltaje del terminal detectado, por medio de la Ecuación (6).

Para Vpcc se considera la caída de voltaje que puede presentar el sistema a causa de las perturbaciones a las cuales fue sometido. El controlador por modulación por ancho de pulso (PWM) genera los pulsos de conmutación para controlar el MLI, haciendo que las corrientes de fuente de referencia (Ia_ref, Ib_ref, Ic_ref) sigan a las corrientes detectadas (Isa, Isb, Isc) [17][21].
ANÁLISIS DE RESULTADOS
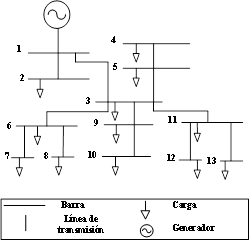
Para el caso de estudio se analiza el sistema de distribución de la IEEE de 13 barras mostrado en la figura 2, en el cual una de sus barras es conectada a una carga no lineal, para identificar los cambios de magnitud en la forma de onda de corriente, así como la distorsión armónica que puede causar dicha carga.
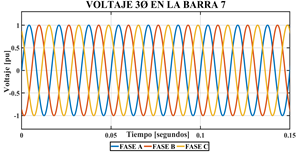
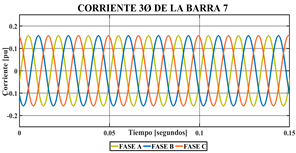
Para el sistema propuesto se analiza el comportamiento en condiciones normales de la barra 7, a la cual, se le implementará una carga no línea, para verificar los cambios en las formas de onda de corriente y el aumento del THDi en un tiempo de simulación de 150 ms. La barra 7 del sistema de prueba de 13 barras de la IEEE en condiciones normales presenta un voltaje de 1 pu con corrientes de 0.15 pu, con respecto a la corriente base de 200 A manteniendo su forma de onda de corriente y de voltaje en condiciones estables y sin perturbaciones; así como se muestra en la Fig. 3 y la Fig. 4, respectivamente.
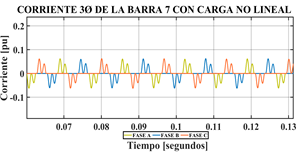
Para constatar el rendimiento del sistema ante la presencia de carga no lineal, se conecta como carga no lineal al puente rectificador de diodos con una carga RC. La carga se encuentra conectada en t=0. Esta carga conectada en dicha barra produce armónicos en forma de onda de corriente de carga que deforman y disminuyen la onda de corriente, como lo muestra la Fig. 5.
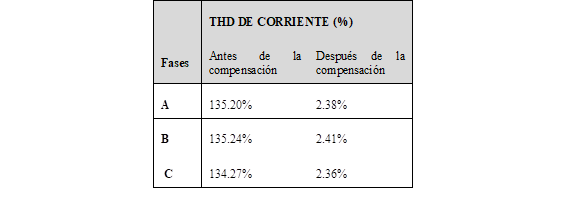
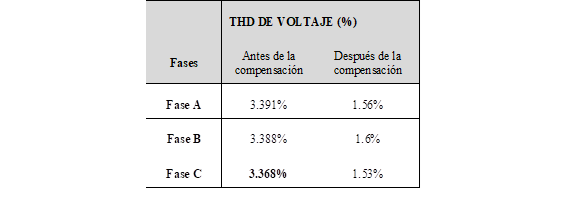
El THD de voltaje que produce la carga no lineal es de 3.39% aproximadamente, aunque la distorsión armónica es muy baja, esta es capaz de deforma la onda original de voltaje. En la Fig. 6, la THD provocada por la carga no lineal ocasiona el incremento del THDi de la barra 7 en un 135.20% en la fase A, 135.24% en la fase B y en la fase C al 134.27 %.
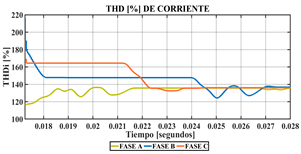
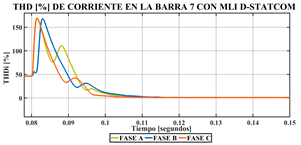
Las fases A, B y C generan un pico de THD al momento de la energización, las cuales se estabilizan en un periodo de 500 ms; después de dicho periodo de tiempo el THDi de las 3 fases se mantienen en los valores indicados. La fase A empieza con un contenido armónico de corriente del 120% aproximadamente, y al cabo de 10 ms empieza el crecimiento del THDi, hasta los valores ya mencionados. De igual manera la Fase C empieza con un THDi del 165% para posteriormente disminuir e igualar a las demás fases. En cambio, la Fase B es la que tiene el pico más alto, alcanzando aproximadamente el 180% de THDi al momento de la energización. Sin embargo, aunque el THDi disminuye después de la energización, los niveles alcanzados son muy altos, que generan efectos negativos. Para poder suprimir la distorsión armónica de corriente, se conecta en la misma barra de análisis el MLI D- STATCOM, de esta manera se inyecta la corriente de fase en el sistema en oposición a las corrientes armónicas que genera la carga no lineal y así compensar los armónicos de corriente.
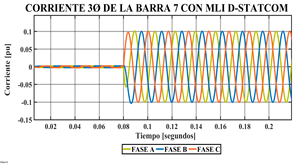
La forma de onda de la Fig. 7 corresponde a la corriente de la barra 7 después de haber inyectado la compensación con el MLI D-STATCOM en donde se aprecia que la forma de onda vuelve a su estado de operación normal libre de distorsión armónica. La forma de onda de voltaje, después de la compensación, vuelve a los estados iniciales, mostrando una onda sinusoidal libre de distorsión, así como lo muestra la Fig. 8.
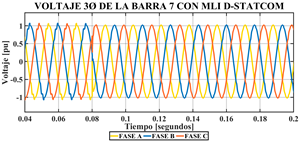
El MLI D-STATCOM entra en funcionamiento en t=80ms después de haber energizado la barra, este tiempo está determinado por el interruptor trifásico conectado entre la barra de análisis y el compensador con la finalidad de mostrar. La diferencia de forma de ondas de corriente que se tiene antes y después de la implementación del MLI D-STATCOM; es decir que entre los tiempos t=0s y t=80ms existe deformación de la onda de corriente como lo mostraba la Fig. 5, y de ahí en adelante entra en funcionamiento la compensación ya señalada.
Como muestra la Figura 9 el THDi de la barra 7 decae considerablemente sus valores de distorsión armónica, obteniendo una mejora en las corrientes de la barra con la carga no lineal y el compensador conectados simultáneamente. Los valores de THDi y de THDv encontrados después de la compensación se muestran en las Tablas comparativas 1 y 2.
CONCLUSIONES Y RECOMENDACIONES
La capacidad de mejorar la distorsión armónica total de corriente (THDi), del inversor multinivel en cascada de tres niveles D-STATCOM, analizado bajo el esquema de control, con la técnica del marco de referencia síncrono, en presencia de una carga no lineal, en el sistema de distribución IEEE de 13 barras, el cual fue modelado y simulado en el software MATLAB/Simulink, es eficiente para mejorar los niveles de calidad de la energía en el sistema de distribución.
El inversor multinivel (MLI) D-STATCOM reduce casi en su totalidad el THDi en cada una de las líneas de la barra 7, cuando en esta se encuentra conectada una carga no lineal, además de que la corriente recupera su magnitud inicial de 200 amperios luego de la compensación.
Las formas de ondas tanto de corrientes como de voltajes con carga no lineal muestran señales sinusoidales perfectas luego de la implementación del MLI D-STATCOM según los resultados obtenidos.
Los valores de corrientes no se ven afectados después de la conexión del compensador, así mismo los voltajes mantienen su magnitud de operación normal entre 0.95 pu y 1.05 pu en cada una de las barras del sistema.
La carga no lineal implementada no afecta notoriamente al THD de voltaje, sin embargo, la implementación de la compensación a través del MLI D- STATCOM reduce el THDv a casi su totalidad, teniendo el 1% de distorsión.
En cuanto al THDi, que, si se ve más afectado por la carga no lineal, se encuentra muy por debajo de los límites máximos establecidos por las normas y parámetros de calidad de la energía IEEE 519 y ISO 61000, que se tomaron de referencia, siendo el THDi más alto de 135.27% sin la compensación y 2.36% después de la compensación. Así mismo el armónico de tercer orden que es el más alto con 32.36% se ve reducido a un 0.67% en una frecuencia fundamental de 60Hz.
Es por esto que resulta una estrategia eficaz la implementación del MLI D- STATCOM para mejorar la calidad de energía, ya que su funcionamiento permite reducir notablemente el THDi que generan las cargas no lineales en el sistema.

