











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkINTRODUCCIÓN
La planificación y operación de un sistema eléctrico de potencia se basa en diferentes tipos de estudios relacionados con simulaciones del comportamiento en estado estacionario y dinámico. El comportamiento real del sistema es estimado mediante el uso de simulaciones basadas en software. En este contexto, la disponibilidad de modelos adecuados de cada uno de los componentes del sistema garantiza simulaciones lo suficientemente precisas y, en consecuencia, decisiones acertadas con relación a acciones de control. Los diversos componentes físicos del sistema de potencia (entre ellos las centrales de generación), así como sus sistemas de control, deben modelarse adecuadamente, con suficiente detalle y precisión; esto permite representar con exactitud el comportamiento real del sistema de potencia. Definido el modelo específico, surge la incógnita ¿es un modelo válido? Esta interrogante muchas veces tiene una respuesta negativa, ya que el modelo implementado o diseñado frecuentemente corresponde a una representación matemática, cuyos parámetros, en primera instancia, necesitan ser ajustados o identificados con base en un proceso de validación.
La validación de los modelos matemáticos de los diferentes componentes de un sistema eléctrico de potencia toma un papel fundamental a raíz de dos eventos suscitados en julio y agosto de 1996 en el sistema interconectado occidental de Estados Unidos, operado por el Consejo Coordinador de Electricidad del Oeste (WECC, por sus siglas en inglés). Estos eventos derivaron en un disturbio complejo que incluyó colapso de voltaje, oscilaciones de potencia no amortiguadas y pérdidas de generación. Cuando los ingenieros de planificación intentaron reproducir ambos eventos en simulaciones, no hubo coincidencia entre las simulaciones y las grabaciones reales de perturbación, recayendo en la respuesta de que aquello sucedió debido a que los modelos del sistema eléctrico de potencia no se encontraban correctamente validados [1] y [2].
Las centrales hidroeléctricas constituyen una parte importante dentro de un sistema eléctrico y por tanto sus sistemas de control, tales como el regulador automático de voltaje (AVR, por sus siglas en inglés), el estabilizador de sistemas de potencia (PSS, por sus siglas en inglés) y el regulador de velocidad (governor GOV en inglés), desempeñan un papel fundamental dentro de la estabilidad operativa del sistema.
En la actualidad, la Unidad de Negocio CELEP EP CCS, así como el Operador Nacional de Electricidad CENACE, poseen los modelos en simulación validados, únicamente del AVR y PSS de la central [3]. En el caso del sistema regulador de velocidad - turbina, ambas entidades se encuentran ante la limitante de poseer un modelo estructurado y ajustado únicamente con base en información técnica proporcionada durante el diseño de la central y no validado de forma correcta. En consecuencia, no se dispone de un modelo que represente fielmente la respuesta dinámica del sistema mencionado y del conjunto total de los esquemas de control de las unidades de generación, pudiendo de esta forma entregar resultados erróneos y predicciones equívocas de simulación ante posibles eventos de variación de frecuencia o carga y diferentes tipos de fallas en el sistema que pueden repercutir en decisiones desacertadas que podrían llegar a tener un gran impacto técnico y económico tanto en la operación del Sistema Nacional Interconectado (SNI) como de la central. Adicionalmente, no existe un estudio público previo, a nivel nacional, que incluya simulaciones a partir de registros de Unidades de Medición Fasorial (PMU, por sus siglas en inglés) que permita estructurar un proceso de validación para modelos del sistema regulador de velocidad - turbina, proceso que, según NERC (North American Electric Reliability Corporation), debe realizarse de manera periódica.
La técnica de Validación de Modelos de Centrales de Energía (PPMV Power Plant Model Validation por sus siglas en inglés) es muy usada en la literatura. Ésta se basa en perturbaciones de la red registradas por medio de PMU. Esta propuesta toma como referencia las guías de confiabilidad de North American Electric Reliability Corporation (NERC, por sus siglas en inglés) [4], [5], el estándar MOD-027-1 [6] y la metodología (PLAYBACK) con la herramienta de simulación descrita en [2] y [7]. Por otro lado, en [8] se propone una metodología para identificación de equivalentes dinámicos usando un novedoso algoritmo de optimización heurística denominado Mean-variance Mapping Optimization MVMO y mediciones obtenidas de PMU. El MVMO es implementado en PowerFactory a través de programación DPL en [9]. En base a estos desarrollos, en [3] se presenta la implementación de un proceso de identificación paramétrica para el modelo generador - AVR basado en MVMO, el cual es posteriormente adaptado para implementar en PowerFactory el proceso de PPMV en [2] y [7]. No obstante, las aplicaciones hasta ahora implementadas en PoweFactory se han concentrado en la identificación paramétrica del modelo generador-AVR de centrales hidroeléctricas del SNI y no han incluido la identificación de los parámetros del GOV.
Sobre la base de lo mencionado, el presente trabajo propone la modelación y validación de los reguladores de velocidad - turbina de las unidades de generación de la central hidroeléctrica CCS mediante el uso de simulaciones basadas en el software DIgSILENT PowerFactory y a partir de registros obtenidos de eventos que ocurran en el sistema. Estos modelos permitirán realizar análisis apropiados en condiciones de régimen estacionario y dinámico con base en simulaciones que garanticen resultados consistentes de la central para la adecuada toma de decisiones técnicas y económicas en su operación. De igual forma, se propone un protocolo para la validación del sistema de control en estudio.
Según lo revisado en el estado del arte, esta es la primera experiencia de validación de modelos matemáticos de regulador de velocidad y turbina de centrales hidroeléctricas tomando registros de PMU para el análisis del sistema eléctrico en Ecuador, por lo que la componente de innovación es alta.
El resto de este documento es estructurado de la siguiente manera. En primer lugar, se presentan conceptos generales del regulador de velocidad. Posteriormente se explican la metodología de identificación paramétrica y validación. Finalmente, se detalla la aplicación metodológica y análisis de resultados, luego de lo cual se presentan las conclusiones y recomendaciones.
REGULADOR DE VELOCIDAD
El regulador de velocidad, también llamado governor (GOV), controla la velocidad y potencia activa de la unidad, según las normas (IEEE, 125, 1207; IEC 61362; ASME, PTC 29). Consiste en equipos de control y accionamiento para regular el flujo de agua a través de la turbina, para arrancar, acelerar y parar la unidad, regulando la velocidad de la turbina y en consecuencia controlando la potencia activa del generador. En la Fig. 1 se puede apreciar el esquema básico de un regulador de velocidad.


En sistemas aislados, el regulador de velocidad controla la frecuencia, permite el arranque, mantiene y ajusta la velocidad de la unidad de generación para sincronizar con otras unidades o un sistema eléctrico de potencia. En un sistema grande, mantiene la frecuencia después de la sincronización, ajustando la salida de potencia de la turbina a los cambios de carga, que determina la potencia activa del generador (regulación de frecuencia). Así mismo, permite compartir los cambios de carga con otras unidades de manera planificada en respuesta a las variaciones de frecuencia del sistema. Finalmente, realizada el apagado/parado norma o de emergencia por sobre velocidades en las unidades como protección. En la Fig. 2 se muestra el diagrama de bloques de un regulador de velocidad [10].
Modos de Control
En el control de la turbina hidráulica por medio del regulador de velocidad, se pueden distinguir los siguientes modos principales de control.
Control de velocidad (isócrono)
Control de potencia (en modo load o droop)
Control de nivel de agua
Control de apertura
Control de caudal
En algunos sistemas y en la práctica actual, se producen combinaciones de los modos de control, para más información de los modos de control ver [11].
Control Frecuencia - Potencia
El control de frecuencia de la red generalmente está estructurado de forma jerárquica en control primario, control secundario y control terciario. El presente documento se enfoca únicamente en el control primario de frecuencia ya que es donde el regulador de velocidad actúa de forma automática.
El control primario de frecuencia se realiza para lograr el equilibrio entre la demanda de potencia y la generación; es automático y localmente realizado por los sistemas de regulación de velocidad de cada una de las centrales conectadas a un sistema eléctrico de potencia. Perturbaciones tales como aumento o disminución de carga, entrada o salida de generación provocan variaciones del valor de referencia (60 Hz generalmente) de frecuencia de la red, valor que debe ser compensando inicialmente por la inercia propia de giro debido a la robustez de las unidades de generación conectadas a la red [12].
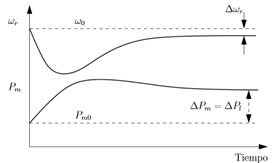
Con el fin de reestablecer el equilibrio entre demanda y generación, los reguladores de velocidad automáticamente realizan la regulación primaria de frecuencia (RPF) para mantener estable la frecuencia de la red, como se aprecia en la Fig. 3. La contribución final de una unidad en la RPF depende del estatismo (droop) de la unidad generadora y de la reserva de control primario de la unidad en cuestión si posee [13]. Tan pronto como se restablece el equilibrio debido al aumento o disminución de potencia activa (ΔPm), la frecuencia de la red se estabiliza y permanece en un valor de estado estacionario que difiere del valor de referencia de la frecuencia debido al estatismo de las unidades. La diferencia de frecuencia (Δωr) debe ser corregida por la regulación secundaria de frecuencia (RSF).
La constate Rs de una unidad conocida como estatismo de potencia permanente de una unidad de generación, es igual a la relación entre el incremento relativo (por unidad) de frecuencia Δf y el incremento relativo de potencia activa de salida ΔPG, se expresa de acuerdo con la Ecuación 1.

Por lo tanto, la generación de la unidad en estado estacionario es una función lineal de la velocidad de la unidad, siguiendo la gráfica que se muestra en la Fig. 4. La pendiente de esta respuesta característica está determinada por la constante Rs.


Figura 5: Diagrama funcional esquemático de una unidad con regulador de velocidad que utiliza un controlador PID idealizado con estatismo de potencia
La Fig. 5 proporciona un esquema del principio funcional utilizando la Ecuación 1 según la norma IEC 61362 (el mismo diagrama podría dibujarse utilizando la Ecuación 2 frente al regulador PID).

METODOLOGÍA PROPUESTA
En la presente sección se presenta una descripción detallada en etapas de la metodología propuesta, incluyendo la modelación y validación de los sistemas de control de velocidad. Esta metodología es aplicable a cualquier central hidroeléctrica.
Se estructura un proceso de modelación e identificación paramétrica mediante el uso del algoritmo heurístico de optimización MVMO y la aplicación de PPMV para la validación de reguladores de velocidad y turbina en centrales hidroeléctricas, basada en perturbaciones del SNI registradas por PMU. En primer lugar, se recopila información técnica de la central, luego se modela usando programación DSL de PowerFactory; y, posteriormente, se aplica el método PPMV, de acuerdo con lo planteado en [2] y [7].
Es necesario mencionar que los registros de perturbaciones pueden ser reemplazados por resultados de pruebas controladas de campo realizadas a las unidades de generación según la norma IEC 60308:2005 [14], el estándar MOD-027-1 [6] o las guías de confiabilidad de NERC [4], [5]. En este trabajo, las pruebas no fueron consideradas para la validación del modelo debido a que los registros de perturbaciones, según NERC [4], son una alternativa que proporciona un modelo más preciso.
La metodología se divide en cuatro etapas presentadas en el diagrama de flujo de la Fig. 6. Las tres primeras corresponden al planteamiento para la modelación matemática del regulador de velocidad y turbina, mientras que la última etapa se enfoca en la identificación paramétrica y validación del modelo desarrollado.
ETAPA 1: Recopilación de información de manuales técnicos de la central hidroeléctrica.
ETAPA 2: Modelación matemática del regulador de velocidad y turbina en DSL de PowerFactory.
ETAPA 3: Proceso de pruebas y simulación
ETAPA 4: Identificación paramétrica y validación del modelo de regulador de velocidad y turbina.
Recopilación de Información en la Central Hidroeléctrica
El reconocimiento general de la central hidroeléctrica en estudio permite familiarizarse con su funcionamiento, la información relevante abarca:
Potencia nominal, parámetros del modelo y características generales de las unidades de generación.
Tipo, componentes y funcionamiento de la turbina.
Registros de perturbaciones internas y externas a la central que involucren la actuación del regulador de velocidad.
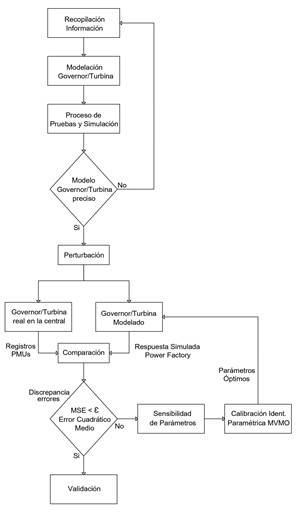
Figura 6: Diagrama de flujo proceso de modelación, validación e identificación paramétrica del modelo de regulador de velocidad y turbina
En los manuales técnicos de la central en estudio se encuentra la información más importante con respecto al regulador de velocidad y la turbina, sin embargo, suele ser muy extensa y confusa. Por tanto, es fundamental resumir toda esta información del regulador de velocidad en:
Generalidades y componentes.
Tipo y funcionamiento.
Modos de control.
Funciones de transferencia o ecuaciones diferenciales.
Forma de operación del regulador de velocidad con el sistema interconectado.
Diagramas de bloques del modelo matemático del regulador con sus parámetros de ajuste.
Valores de los parámetros de los modelos matemáticos y límites o rangos numéricos.
Software del regulador de velocidad para realizar pruebas.
La información obtenida sobre las unidades de generación, la turbina y el regulador de velocidad de los manuales técnicos constituye el punto de partida para la modelación matemática de los sistemas de control de una central hidroeléctrica.
Modelación Matemática del Regulador de Velocidad y Turbina en DSL de PowerFactory
Sobre la base de la información obtenida de la central hidroeléctrica en estudio, con especial énfasis en el regulador de velocidad y la turbina, se debe estructurar el modelo matemático en DSL (DIgSILENT Simulation Language).
En DSL, las funciones de transferencia en el dominio de Laplace son plasmadas en diagramas de bloques. La programación DSL se basa en una estructura jerárquica de estos diagramas de bloques en macros (funciones de transferencia), common models (modelos de control) y composite models (estructura del sistema).
A partir de las macros se estructura el modelo del regulador de velocidad y la turbina mediante funciones de transferencia que representan y determinan su comportamiento. Los modos de control del regulador de velocidad deben quedar correctamente definidos en el modelo. Para el modelo de la turbina se puede utilizar el diagrama de bloques que se considere oportuno para el estudio y dependiendo del tipo de turbina de la central hidroeléctrica, ya que existen modelos ideales, modelos para turbinas Francis o modelos para turbinas Pelton con diferentes características.
Es importante recalcar que se deben establecer las variables de entrada y de salida del modelo del regulador de velocidad y turbina, las cuales generalmente son:
Variables de entrada: velocidad real, velocidad de referencia, potencia activa real, potencia de referencia.
Variables de salida: posición del inyector o compuerta, posición del deflector, potencia de la turbina.
Una vez que se haya implementado el modelo de control del regulador de velocidad y la turbina, se deben definir matemáticamente las condiciones iniciales del modelo, es decir inicializar las variables. La inicialización depende de las condiciones de la unidad de generación en el flujo de potencia, es por esto, que es importante definir las variables de entrada y de salida del modelo completo, ya que estas son señales de la unidad de generación. La inicialización permite llegar a una aproximación en estado estacionario de cualquier sistema que se encuentre representado por ecuaciones algebraico diferenciales [15].
Proceso de Pruebas y Simulación
El modelo realizado en DSL del regulador de velocidad y turbina, luego de ser implementado en una unidad debe ser simulado para verificar su correcto funcionamiento.
Se simula la unidad de generación sometiéndola a perturbaciones en dos escenarios de operación, primero de forma aislada con una carga independiente y segundo interconectada a un sistema eléctrico de potencia.
Con los parámetros originales obtenidos de los manuales técnicos de la central, se debe modelar el regulador de velocidad y posteriormente simular el comportamiento de la o las unidades de generación de la siguiente manera:
Pruebas de estado estacionario.
Simular la unidad aislada con una carga independiente.
Simular la central hidroeléctrica interconectada al SNI.
Simular el modelo del regulador de velocidad y turbina implementado en las unidades de generación de un sistema estándar de prueba tal como los sistemas de 9, 14 o 39 barras.
Identificación Paramétrica y Validación del Modelo del Regulador de Velocidad y Turbina
La validación del modelo de los diferentes controladores de una unidad de generación es un procedimiento esencial para garantizar que las simulaciones a realizarse reflejen el comportamiento del sistema real; y, de esta forma, mantener la seguridad y confiabilidad del sistema con base en estudios realistas.
Con base en la utilización de registradores de perturbaciones dinámicas (DDRs por sus siglas en inglés) como las Unidades de Medición Fasorial (PMU, por sus siglas en inglés), se presenta un método de validación e identificación paramétrica de modelos de regulador de velocidad y turbina de centrales hidroeléctricas basado en perturbaciones que ocurran en el SNI emulando el PPMV utilizando la funcionalidad software-in-the-loop (SIL).
Proceso para la validación e identificación paramétrica del modelo de regulador de velocidad y turbina
El objetivo de la identificación paramétrica es encontrar los valores numéricos, definidos dentro de un rango, de los parámetros del modelo del regulador de velocidad - turbina que permitan ajustar el modelo en estudio para que represente el comportamiento real de los sistemas de control de velocidad de las unidades de generación de una central hidroeléctrica en simulación; y, en consecuencia, el modelo quede validado.
La identificación paramétrica inicia tomando el modelo del regulador de velocidad y turbina correctamente probado en los pasos anteriores de la presente metodología. Segundo, una conjetura inicial de los parámetros a identificarse es definida, los grados de libertad de los parámetros son definidos sobre la base de los límites numéricos permitidos de los mismos, los cuales son encontrados en los manuales técnicos de la central o se puede tomar como referencia los límites establecidos en los modelos genéricos [16]. Luego, se realizan simulaciones en el dominio del tiempo para una o varias perturbaciones definidas (registros de PMU). Dentro de una siguiente etapa, se selecciona las señales eléctricas de voltaje, frecuencia y potencia activa las cuales se contrastan con las mismas señales de referencia medidas (registros de PMU). Posteriormente, se estructura la función objetivo para la identificación paramétrica y el problema de optimización subyacente se resuelve a través del algoritmo de optimización MVMO [2], [3], [7], [8], [9]. Se concibe a la identificación paramétrica como un problema de optimización.
Si la respuesta del modelo coincide con la respuesta real, el modelo de regulador de velocidad y turbina puede considerarse validado. De lo contrario, el modelo debe ser calibrado a través de la identificación paramétrica para encontrar los valores numéricos óptimos de cada uno de los parámetros, esta se realiza con la herramienta computacional mencionada anteriormente. Las brechas en los datos de PMU o las diferencias inexplicables en la respuesta siempre estarán presentes. Sin embargo, si el modelo y los datos de PMU presentan un error aceptable, la identificación paramétrica del modelo ("ajuste") dará como resultado un modelo preciso y se considerará validado.
Las discrepancias (errores) entre la respuesta simulada y los registros de PMU deben enmarcarse en un criterio de evaluación técnico adecuado, es decir, se requiere una cuantificación, más allá de las evidencias visuales entre gráficas. Para esto, se calcula el error cuadrático medio (MSE por sus siglas en inglés) y el error porcentual absoluto medio (MAPE por sus siglas en inglés), considerando los parámetros por defecto y los validados a través de la metodología propuesta [7].
APLICACIÓN METODOLÓGICA A LA CENTRAL HIDROELÉCTRICA COCA CODO SINCLAIR, RESULTADOS Y DISCUSIÓN
En la presente sección se exponen y analizan los resultados obtenidos de la aplicación de la metodología propuesta a la Central Hidroeléctrica CCS.
Información Técnica del Regulador de Velocidad y Turbina de la Central
Central hidroeléctrica Coca Codo Sinclair
La central hidroeléctrica CCS puede generar 1500 [MW] a partir de 8 unidades de generación idénticas conectadas a 8 turbinas hidráulicas idénticas.
La potencia nominal de las unidades de generación es 188,266 [MW], conforme los datos de placa. La turbina de la central CCS es tipo Pelton multi chorro con 6 inyectores encargados de dirigir el agua al rodete de la turbina, cruciales para ajustar su rendimiento, y 6 deflectores que actúan rápidamente para desempeñar el papel de control de sobre velocidad de la unidad bajo grandes fluctuaciones.
Regulador de velocidad
El regulador de velocidad de la central CCS es tipo digital, con controladores tipo PID. Su funcionamiento consiste en recibir retroalimentaciones tales como velocidad y potencia activa de la unidad, apertura de los inyectores, apertura de los deflectores y estado del interruptor del generador (GCB por sus siglas en inglés). Posteriormente determinará las señales de salida de control a los servomotores de los inyectores y deflectores a través del cálculo del controlador PID.
El regulador puede operar en diferentes modos, control de velocidad, caudal, potencia y nivel. En la central CCS el modo nivel se encuentra desactivado. El modo velocidad consiste en un controlador tipo PID mientras que para los modos potencia y caudal corresponden controladores tipo PI.
Modelación Matemática en DSL
Utilizando el lenguaje de simulación DSL y tomando como referencia el modelo facilitado por CELEC EP - CCS, se modela el regulador de velocidad en PowerFactory. La turbina Pelton, que comúnmente usa largas tuberías de agua, es una turbina de doble regulación compuesta por la regulación del inyector y la regulación del deflector [17]. El análisis lineal de modelos de simulación para turbinas Pelton no es adecuado para grandes perturbaciones; es apropiado adoptar un modelo detallado de simulación de turbina para todo el proceso dinámico [18]. Por lo tanto, al no disponer de un antecedente del diagrama de bloques de la turbina en los manuales técnicos, se toma como referencia la turbina utilizada en la validación del modelo de regulador de velocidad y turbina de la central hidroeléctrica Nabang ubicada en la provincia de Yunnan en China descrita en [19] ya que la turbina de dicha central presenta características similares a la de CCS puesto que presenta una caída de agua de 623.6 metros y está compuesta por seis inyectores y seis deflectores.
La literatura de la cual se tomó como referencia el modelo de turbina Pelton [19] se centra en la simulación dinámica con control de inyectores y deflectores. Como hay múltiples inyectores en una turbina Pelton, seis servomotores idénticos se modelan como un solo sistema secundario. Un modelo de servomotor de deflector mecánico que incluye retroalimentación dual con altas ganancias del controlador puede causar inestabilidad oscilatoria. Sin embargo, cuando el inyector y el deflector adoptan el control digital, la relación combinada se simplifica; el “interruptor” de encendido/apagado del deflector se configura mediante software de acuerdo con la velocidad de la unidad aplicable y las condiciones de trabajo [19].
Las variables de entrada del modelo desarrollado son velocidad real y de referencia, potencia real y de referencia. La señal de salida es la potencia de la turbina la cual define la frecuencia y potencia activa de la unidad, variables analizadas en los resultados.
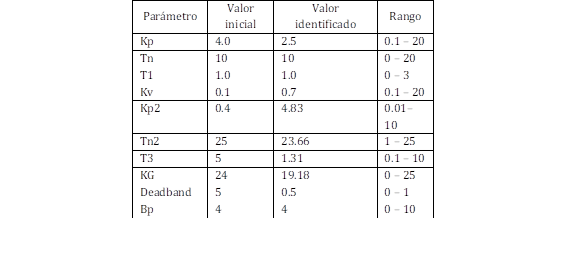
Los parámetros en simulación toman los valores establecidos según el fabricante. En la Tabla 2 se incluyen los valores mencionados con los resultados obtenidos de la identificación.
Se modelaron dos modos de control del regulador de velocidad de CCS, el modo velocidad y modo potencia con droop. El modo de control se elige por medio del selector (Sel Modo) el cual tiene una opción binaria, uno (1) para modo velocidad y (0) para modo potencia.
El servo del inyector consiste en una ganancia KG1, un bloque limitador (Inyt_𝐦𝐢𝐧 y 𝑰𝒏𝒚𝒕_𝒎𝒂𝒙) de apertura/cierre y un integrador simple. Como se mencionó anteriormente, los seis inyectores se modelan como un solo sistema secundario. Así mismo, consta de una selección de inyectores en funcionamiento que se representa por medio de una ganancia.
Una turbina Pelton tiene un dispositivo de corte rápido denominado deflector, que es una de las diferencias con la turbina Francis. El deflector está diseñado para proteger la unidad del exceso de velocidad. El deflector se abre completamente cuando el inyector se abre a un cierto valor en condiciones normales. El deflector puede abrirse a su posición máxima (es decir, el valor de uno) sin una relación combinada con la apertura del inyector, por lo tanto, el cierre de este no ocurrirá bajo pequeños cambios de carga. Cuando la velocidad de la unidad excede un cierto valor de ω2, el deflector se cierra rápidamente para reducir la descarga efectiva en la turbina Pelton y, como resultado, la potencia mecánica de la turbina se reduce rápidamente. Cuando la velocidad de la unidad se reduce a ω1, el deflector comienza a abrirse al valor de uno nuevamente.
Con un servo similar al servo del inyector, el modelo de control de deflector que considera los límites de velocidad de apertura y cierre por medio del bloque Velocidad el cual está programado como un selector. Los parámetros son 𝑲𝑫𝟏 y un bloque limitador (𝑫𝒇𝒍𝒕_𝒎𝒊𝒏 y 𝑫𝒇𝒍𝒕_𝒎𝒂𝒙) de apertura/cierre. Los seis deflectores de igual forma se modelan como un solo subsistema.
El cambio de caudal de agua en la turbina produce un fenómeno conocido como golpe de ariete y provoca un cambio en la caída del agua. Teniendo en cuenta la elasticidad entre el caudal de agua y la pared de la tubería, e ignorando la fricción entre ellos, la función de transferencia de la turbina Pelton viene dada por la Ecuación 3 [19].

Donde 𝑻 𝒘 es la constante de tiempo de inercia del agua, 𝑻 𝒓 es la longitud de la fase del golpe de ariete (wáter hammer) y 𝒔 es el parámetro complejo. El modelo simplificado del modelo de turbina que considera el golpe de ariete elástico se proporciona según la expansión de la serie Taylor de la Ecuación 3 como:

Si se ignora la elasticidad del agua y de la tubería de agua, la función de transferencia [19] de la tubería queda como:

Las funciones de transferencia descritas en las Ecuaciones 4 y 5 tomadas de [19] deben ser implementadas en el diagrama de bloques presentado a continuación en la Fig. 7.
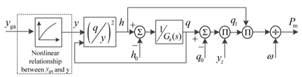
Existe una relación no lineal que relaciona la potencia mecánica de la turbina y la apertura del inyector.
La relación entre la apertura promedio de la aguja y la potencia mecánica de la turbina se representa mediante un ajuste polinómico cúbico el cual se aplica de la siguiente manera:

Donde 𝒂 𝟑 , 𝒂 𝟐 , 𝒂 𝟏 y 𝒂 𝟎 son coeficientes polinómicos, y 𝑰𝒏𝒚𝒕 es la apertura promedio del inyector. El ajuste polinómico cúbico refleja el efecto de aumento no lineal de todos los inyectores con el aumento de la potencia mecánica [19].
Pruebas y Simulaciones realizadas
Se realizaron las pruebas y simulaciones a dos sistemas de potencia en específico, el sistema CCS - SNI y el sistema 39 barras New England, en cumplimiento de lo establecido en la sección 3 de la metodología propuesta para verificar el correcto funcionamiento del modelo de regulador de velocidad y turbina desarrollado antes de proseguir con la validación del modelo.
Pruebas de la unidad aislada
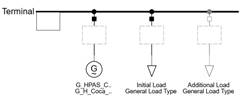
Para las pruebas de la unidad aislada se usa la opción Step Response Test de Power Factory, como se aprecia en la Fig. 8, que permite probar el generador conectado a una barra con una o varias cargas de forma aislada.
Para esta operación, el 𝑴𝒐𝒅𝒐 se varía a (1) para establecer el modo control de velocidad en el regulador de velocidad. En este punto se realizaron diferentes pruebas, las cuales fueron:
Rechazo de carga del 25%, 50%, 75% y 100% del valor de la potencia nominal.
Toma de carga de las unidades.
Paso de ±3% en la velocidad de referencia.
Como ejemplo, se toma el rechazo de carga de 92.25 MW, 50% de la potencia nominal del generador. La Fig. 9 muestra los resultados de la prueba realizada. Se puede apreciar un comportamiento de las señales en estudio coherente a la teoría. El regulador de velocidad cumple con el propósito del control de frecuencia puesto que la mantiene constante y como se aprecia en los gráficos, el homólogo de la frecuencia, la velocidad en pu, busca igualar el valor de wref e igualarse a esta señal. En cuanto a la potencia activa de la máquina, de generar 184.5 MW, disminuye a 92.25 MW para satisfacer el requerimiento de la carga aislada.

Pruebas en el sistema Coca Codo Sinclair - SNI
Se realizaron pruebas que comprende pérdida y aumento de carga en el sistema, así como pérdida y aumento de generación simulando 150 segundos. Las condiciones de despacho fueron 120 MW y -28 MVAR, se intenta emular la generación cotidiana de CCS.
Aumento de carga
Al sistema se le agrega una carga de 300 MW al segundo 1, y se separan las 8 máquinas en dos partes, un generador equivalente que emula el comportamiento de 7 unidades y un generador aparte, esto con el objetivo de analizar la potencia activa de una máquina individual. La Fig. 10 muestra los resultados de la prueba realizada. Se aprecia un comportamiento de las señales en estudio coherente a la teoría.
La potencia de la turbina y la potencia eléctrica se igualan, manteniendo el equilibrio eléctrico mecánico y actúan acorde a la perturbación aumentando su valor numérico de 0.6414 a 0.8532 pu. La frecuencia eléctrica, disminuye de 60 Hz a un mínimo de 59.644 Hz, y por la acción del regulador de velocidad se recupera hasta alcanzar el equilibrio en un valor de 59.923 Hz, luego de 77 segundos, lo cual representa un accionar lento del regulador pero que actúa acorde a la teoría.
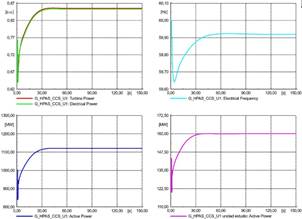
Se cumple con la RPF a pesar de que no se puede recuperar la frecuencia a 60 Hz, esto debido al estatismo permanente, pues el residual de frecuencia como se mencionó en la sección 2.2 debe ser corregido por la RSF.
En cuanto a la potencia activa de las máquinas, los 7 generadores aumentan su potencia activa de 840 MW a 1120.23 MW para satisfacer el aumento de carga y contribuir a la recuperación de la frecuencia. Individualmente cada generador aporta con un aumento de generación de 120 MW A 160.03 MW dando un total de 1280.24 MW.
Pérdida de generación
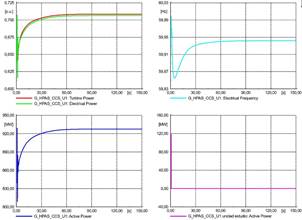
Sin aumento de carga, se desconecta al segundo 1 un generador de la barra. La Fig. 11 muestra los resultados de la prueba realizada. Se aprecia un comportamiento de las señales en estudio coherente a la teoría.
La prueba realizada guarda estrecha relación con el aumento y pérdida de carga, con la diferencia de que, al perder generación, el regulador de velocidad actúa como frente a un aumento de carga, mientras que, ante un aumento de generación, actúa como ante la pérdida de carga.
Pruebas Sistema de 39 Barras New England
Como se mencionó en la metodología, en la presente sección se retira el modelo de regulador de velocidad y turbina que viene por defecto en el sistema de prueba, en específico del generador número 10 y se lo reemplaza por el modelo de regulador de velocidad y turbina desarrollado. Debido a la estructura del diagrama bloques, modelo de turbina y modos de operación, el modelo de regulador de velocidad que viene por defecto en el sistema de prueba, así como otros modelos estándar, al ser implementados en la central CCS no cumplen con el requerimiento de RPF.
En la metodología se recomienda realizar las mismas pruebas realizadas en la sección anterior, pero para esto se debe en primera instancia establecer los parámetros correctos en el modelo del regulador de velocidad implementado. Por tal razón, se verificó el correcto funcionamiento del sistema. Posterior a esto el procedimiento realizado se describe a continuación.
Se simuló un evento de pérdida de carga al segundo 5, en específico de la carga 26_2 del sistema, con una potencia activa y reactiva de 50 [MW] y 17 [MVAR] respectivamente, para apreciar el accionar del regulador de velocidad que viene implementado por defecto en el generador 10. Se registraron las dos variables más relevantes según el evento que son la potencia de la turbina del generador (denominada en la Fig. 12 como sigread1) y la velocidad (frecuencia) del sistema (denominada en la Fig. 12 como sigread2), ambas variables en el sistema de medición por unidad. Como manda la teoría, al existir una pérdida de carga, se puede apreciar en la Fig. 12 una disminución en la potencia de la turbina del generador 10 y un aumento en la velocidad (frecuencia).
Tomando como referencia la metodología y procedimiento utilizado en[2], adaptándola al sistema de control de velocidad, se utiliza el algoritmo de optimización enjambre de partículas (PSO) implementado en DPL (DIgSILENT Programming Language), y sobre la base de los registros del literal 1, se realizó la identificación paramétrica del modelo de regulador de velocidad y turbina desarrollado. Esto se realizó con el objetivo de obtener los parámetros adecuados que adapten el modelo desarrollado al sistema de prueba y replique de forma casi idéntica el accionar del regulador de velocidad y turbina que viene por defecto. Se establecieron nuevos valores numéricos establecidos para cada uno de los parámetros del modelo luego de realizar la identificación paramétrica.
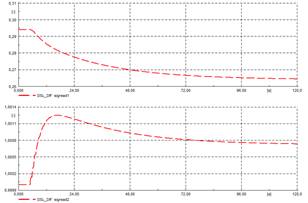
Figura 12: Potencia de la turbina y velocidad (frecuencia) del generador 10 del sistema de 39 barras New England ante una salida de carga
Se simuló el mismo evento de pérdida de la carga 26_2 de 50 [MW] y 17 [MVAR] a los 5 segundos, pero esta vez se implementó en el generador 10 del sistema de prueba de 39 barras New England el modelo de regulador de velocidad y turbina desarrollado en el presente trabajo. En la Fig. 13, las gráficas en color verde corresponden a la potencia de la turbina y la velocidad (frecuencia) de la simulación realizada con el regulador de velocidad y turbina de CCS mientras que las gráficas en color rojo corresponden a la simulación de la Fig. 12.
En la Fig. 13 se aprecia que luego de la identificación paramétrica la simulación con el modelo de regulador de velocidad y turbina desarrollado actúa casi exactamente igual al modelo que viene por defecto en el ejemplo de literatura trabajado. Las gráficas se sobreponen casi en su totalidad, las diferencias entre las señales son mínimas y guardan una estrecha relación en cuanto a la dinámica, tiempos y amortiguación. Esta prueba permite corroborar que el modelo desarrollado del regulador de velocidad y turbina fue correctamente realizado y cumple con las funciones requeridas por un generador hidráulico con respecto a acciones de control en lo que compete a estabilidad de frecuencia y generación y puede ser fácilmente adaptado a cualquier central hidroeléctrica.

Figura 13: Comparación gráfica de la simulación realizada con el regulador de velocidad y turbina por defecto y la simulación realizada con el regulador de velocidad y turbina desarrollado
Es necesario mencionar que a pesar de que todos los modelos funcionaron satisfactoriamente, el modelo que presentó el mejor rendimiento fue el de la turbina 2, por lo tanto, se presentan los resultados del mencionado modelo.
Identificación Paramétrica y Validación del modelo del regulador de velocidad y turbina de Coca Codo Sinclair
Luego del éxito conseguido en la sección 4.3, se presenta a continuación la identificación paramétrica y validación del modelo de regulador de velocidad y turbina 2 desarrollado.
Registros de PMU
Los registros de las PMU fueron facilitados por la Subgerencia de Investigación y Desarrollo del CENACE, se aprovechó la potencialidad de su sistema WAMS, donde las PMU entregan 60 muestras por segundo.
El evento seleccionado donde se apreció una perturbación suficiente en la frecuencia y en la potencia activa con injerencia del gobernador, fue uno correspondiente al 17 de julio de 2019 desde las 13H58 hasta las 14H05, día donde se desbloqueó el regulador de velocidad de la central colocando un valor de banda muerta de frecuencia de 0.05% y se pudo apreciar como el regulador de velocidad comenzó a actuar y a compensar las variaciones de frecuencia con el aumento y disminución de potencia activa en cumplimiento con la regulación primaria de frecuencia durante 125 segundos.
Los registros de potencia activa en [MW] y frecuencia [Hz] se extrajeron de la PMU ubicada en la Unidad 4 de la Central Hidroeléctrica CCS mientras que los registros de voltaje en [kV] fueron obtenidos de la PMU ubicada en la línea 1 San Rafael. Se utilizó estos registros de voltaje debido a que provienen de la PMU más próxima a CCS que registra el voltaje a 500 kV. Los valores iniciales de potencia activa y reactiva a los cuales se encontraba operando la unidad fue de 129.822 [MW] y 23.9709 [MVAR] respectivamente, mientras que el valor de frecuencia de la red fue de 59.983 [Hz] y el valor de voltaje fue 509.557 [kV].
Identificación paramétrica y validación
A continuación, se presentan los resultados de la identificación paramétrica realizada al modelo desarrollado en PowerFactory del regulador de velocidad y turbina de la central hidroeléctrica CCS. La Fig. 14 muestra el Playback de frecuencia y voltaje, donde las señales en color verde (denominadas sigread3 y sigread4) corresponde a los registros de las PMU de voltaje en [kV] y la frecuencia en [Hz] respectivamente, mientras que las señales en color rojo (denominadas sigcalc3 y sigcalc4) son los resultados de la simulación (Playback) para la identificación paramétrica.
En la Fig. 15 se presenta las señales de potencia activa, donde la señal en color verde (denominada sigread1) corresponde a los registros de la PMU de potencia activa en [MW], se presenta con signo negativo netamente por cuestiones de programación, mientras que la señal en color rojo (denominada sigcalc1) es el resultado de la simulación.
Comparando las respuestas simuladas con las registradas por la PMU como se aprecia en la Fig. 14 y Fig. 15, se puede apreciar que la dinámica de las señales eléctricas analizadas es igual, los mismos tiempos en la respuesta y fluctuaciones, en definitiva, las gráficas se sobreponen.
Como se mencionó en la metodología, el criterio de evaluación técnico para determinar si la respuesta obtenida en simulación luego de la identificación paramétrica es adecuada, se realiza a través del cálculo del error cuadrático medio (MSE) entre la señal registrada por la PMU y la simulada, para este fin, se utiliza la fórmula de la Ecuación 7.

En este sentido, en la Tabla 1 se presenta el cálculo del MSE. Como se mencionó, no existe un criterio definido en literatura para considerar aceptable o no el valor obtenido del MSE, sin embargo, al estar los valores calculados lo más cercanos a cero se concluye que el modelo ha sido correctamente validado.
La media del error absoluto en porcentaje (MAPE) se calculó con el objetivo de fortalecer el criterio técnico para determinar si la respuesta obtenida es aceptable, como se aprecian los resultados en la Tabla 1, el porcentaje de error es sumamente bajo.
Finalmente, en la Tabla 2, se indican los principales parámetros configurados por el fabricante, los valores identificados y su rango de ajuste.
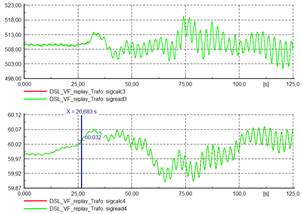
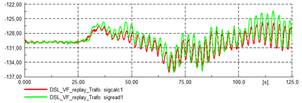
Tabla 1: Error cuadrático medio calculado entre la señal registrada por la PMU y la obtenida en simulación

CONCLUSIONES Y RECOMENDACIONES
Aprovechando la potencialidad del software DIgSILENT PowerFactory y mediante su lenguaje de programación DSL, se modela el regulador de velocidad y turbina de Coca Codo Sinclair y se lo representa por medio de diagrama de bloques.
Se estructura un proceso de 4 etapas las cuales se contemplan la recopilación de información, modelación matemática, pruebas y simulaciones para concluir con la validación de sistemas de control de velocidad (regulador de velocidad y turbina) por medio perturbaciones ocurridas en la red registradas por PMU para centrales hidroeléctricas, cumpliendo con el estándar MOD-027-1 y las guías de confiabilidad de NERC. La metodología planteada se aplica a las unidades de la central hidroeléctrica CCS. Se concluye que validar un modelo de regulador de velocidad y turbina por medio de perturbaciones ocurridas en la red resulta eficiente desde el punto de vista operativo y económico, no se genera indisponibilidad de servicio a la central por la realización de pruebas de campo.
Se contrastan los resultados de las simulaciones del modelo de regulador de velocidad y turbina desarrollado con los registros de una perturbación ocurrida en el Sistema Nacional Interconectado que cuenta con registros de medición provenientes de PMU, a través del cálculo del error cuadrático medio (MSE). El resultado de esta comparación permite concluir que el modelo desarrollado para la central hidráulica CCS ha sido correctamente validado, pues se comportamiento en simulación emula al comportamiento real. La validación puede ser complementada mediante pruebas controladas de campo.
El presente trabajo constituye una guía para trabajos futuros relacionados con la modelación y validación de sistemas de control de velocidad para centrales hidroeléctricas. Los aportes más destacados que pueden ser utilizados son el modelo desarrollado y la metodología ya que puede ser una referencia aplicable para sistemas de control de voltaje o estabilizadores de potencia en todo tipo de centrales. Se recomienda mejorar constantemente y darle seguimiento tanto al proceso de modelación y validación de sistemas de regulación de velocidad, para que en un futuro se pueda incluir dentro del código de red (Grid Code) que se encuentra en desarrollo a través del liderazgo de CENACE. Esto permitirá que, durante el comisionamiento de las centrales, se pueda conseguir una correcta sintonización de parámetros.

