











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkINTRODUCCIÓN
Las redes de monitoreo de área extendida (WAMS) se utilizan para supervisar, proteger y controlar un sistema eléctrico. Estos sistemas están compuestos de una red interconectada de dispositivos, de entre los cuales las Unidades de Medición Sincrofasorial (PMU por sus siglas en inglés) se encargan de obtener los fasores de un punto del sistema bajo supervisión en un determinado momento [2].
Una PMU es un dispositivo de adquisición de datos que permiten estimar sincrofasores, frecuencia y tasa de cambio de frecuencia (ROCOF) con la etiqueta de tiempo que muestra el instante en que son estimadas [3]. El sincrofasor es un número complejo que muestra la amplitud y fase de una señal sinusoidal donde el ángulo de fase se determina con respecto a una referencia absoluta de tiempo en este caso el Tiempo Universal Coordinado (UTC) [4]. Es decir, el ángulo de fase se calcula usando el UTC como referencia de tiempo, permitiendo de esta manera tener una única referencia para todas las señales que van a ser medidas en un área global. Esto facilita analizar los fasores calculados en diferentes puntos de la red de dimensiones de área muy extensa porque están relacionados por instantes de tiempo similares.
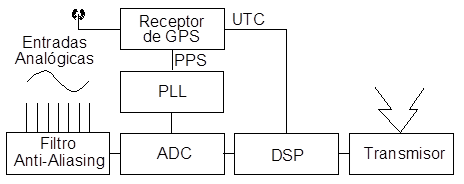
En la PMU la sincronización y la información de tiempo se obtiene del sistema de posicionamiento global (GPS). El Oscilador de Enganche de Fase (PLL por sus siglas en inglés) produce una señal de pulsos que controla y sincroniza el Convertidor Análogo a Digital (ADC). Las muestras son enviadas al Procesador Digital de Señales (DSP) donde se realizan las estimaciones fasoriales y se genera la etiqueta de tiempo. Esta información es transmitida a un dispositivo receptor para su posterior análisis [5]. En la Fig1. Se puede observar el diagrama esquemático de la estructura básica de una PMU [7]
Las PMUs son instrumentos de medición comerciales de alta precisión se ubican generalmente en los sistemas de transmisión por su elevado costo. En la actualidad, debido a la introducción de las redes eléctricas inteligentes, las cuales requieren monitoreo en tiempo real, el interés en las PMUs domésticas y para redes de distribución y subdistribución ha aumentado significativamente. Por tal razón, en este trabajo se plantea el desarrollo de un prototipo y las respectivas pruebas de funcionamiento de una PMU de bajo costo para sistemas de bajo voltaje [15].
ESTIMACIÓN FASORIAL
Estimación Fasorial para señales a la frecuencia nominal usando DFT
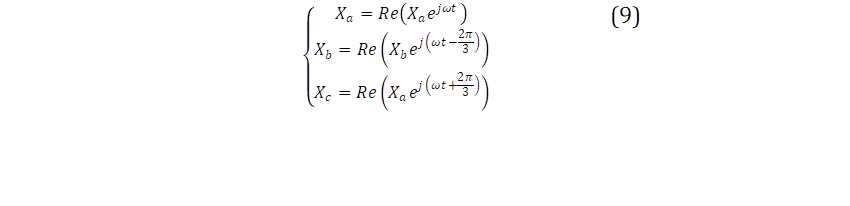
Dada una función sinusoidal x(t) definida por:

Donde X(t) es muestreada a una frecuencia Nf0. Siendo un ángulo de muestreo θ = 2π/N, las muestras de la señal sobre una ventana de N muestras puede ser descrita como:

Donde: n = 0, 1, 2, …, N-1
Aplicando las propiedades de la transformada discreta de fourier se puede obtener el fasor de frecuencia fundamental del conjunto de muestras Xm mediante la siguiente ecuación:

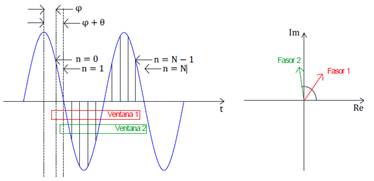
Para realizar el algoritmo de estimación se debe dar una ventana inicial de N muestras de la señal de entrada. Con cada muestra posterior se recorre la ventana y se repite el proceso de cálculo. Cada fasor estimado en el proceso tendrá la misma magnitud, pero se desfasan entre sí un ángulo de nθ como se observa en la Fig. 2. Para calcular el fasor 1 representado por XN-1 y el fasor 2 representado por XN se lo realiza de la siguiente forma: [8]


Estimación fasorial para señales de entrada fuera de la frecuencia nominal
Debido a que la frecuencia de la red eléctrica varía constantemente como consecuencia de las interacciones por la demanda de energía en la red. Para realizar la estimación fasorial se utiliza el algoritmo de DFT y es necesario realizar un ajuste a la frecuencia nominal. En la Fig 3 se ilustra una señal con una frecuencia menor a la nominal.
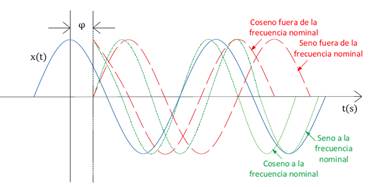
Figura. 3: Estimación fasorial usando el algoritmo DFT para una señal fuera de la frecuencia nominal
A partir de un análisis matemático del fasor X(t) [8]

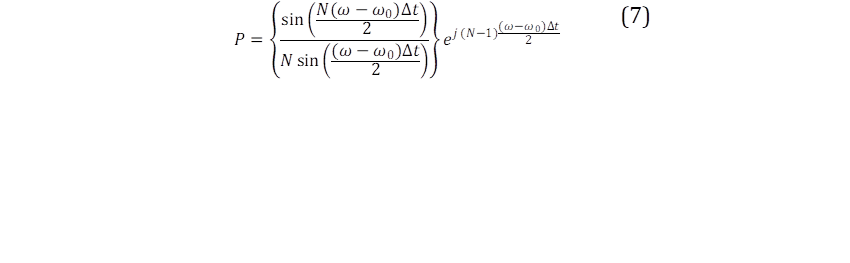

La ecuación (6) representa el fasor estimado de la señal fuera de la frecuencia nominal donde la desviación entre la frecuencia de la señal y la frecuencia nominal dependen del valor de P y Q. [8]

Estimación de las componentes simétricas de un sistema trifásico
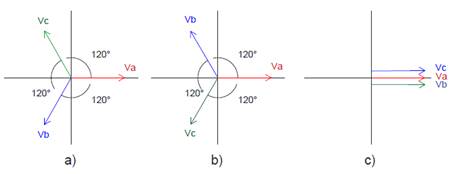
Un sistema trifásico simétrico y balanceado es aquel donde cada fasor debe estar desfasado entre si 120 grados y de amplitud y frecuencia iguales. Sin embargo, no se cumple esto debido a la conexión de cargas desbalanceadas o fallas de sistemas.
Un sistema trifásico desbalanceado puede ser descompuesto en la suma de tres grupos simétricos de fasores balanceados de: secuencia positiva, negativa y cero. [9]
Dado un sistema trifásico representado por: [9]
Resolviendo para un sistema con componentes simétricas se deduce que los fasores de cada secuencia son: [9]
 }
}


En operación normal se puede observar que el valor de la secuencia positiva es mucho mayor a las otras componentes, pero en presencia de falla es menor. El margen de variación entre la secuencia negativa y cero respecto a la positiva permite determinar el nivel de desbalance del sistema.
DISEÑO E IMPLEMENTACIÓN DE UNA PMU DE BAJO COSTO PARA UN SISTEMA TRIFÁSICO DE BAJA POTENCIA
Desarrollo de hardware
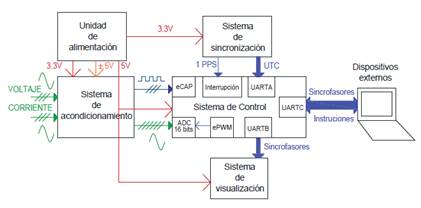
En la Fig. 6 se puede observar el esquema de conexión e interacción entre los sistemas que conforman la PMU desarrollada. En color rojo y naranja se representan líneas de alimentación y circuitos analógicos respectivamente. En verde están representadas las señales de entrada y en azul los buses de datos digitales.
Sistema de sincronización
En la sincronización del sistema se utiliza un módulo GPS de DIGILENT que cuenta con comunicación UART y la posibilidad de conectar una antena para exteriores. Este sistema permite obtener una referencia de tiempo fija para calcular los fasores. [10]
Sistema de sensado de variables
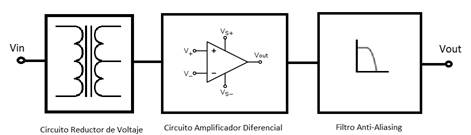
Las variables que se van a medir son: voltaje, corriente y frecuencia de la red eléctrica. El esquema para la medición de voltaje se lo puede observar en la Fig. 7 que consiste en tres etapas. La primera reduce el voltaje de entrada a uno que pueda manejar el microcontrolador, la segunda corresponde a un circuito amplificador diferencial con ganancia unitaria y la tercera un filtro pasa bajo.
Para el circuito de corriente se utiliza un sensor de efecto hall T604004 de Vaccuumschmelze que tiene aislamiento galvánico y entrega una salida de voltaje proporcional a una entrada de corriente. La corriente de entrada es soportada de 0 a 15A. [12]
El circuito de sensado de frecuencia que se utilizó fue un detector de cruce por cero que envía pulsos al microcontrolador y corresponde a la mitad del período de la señal.
Sistema de visualización
Para la visualización de los datos y los resultados obtenidos se utiliza la tarjeta de desarrollo STM32F746Discovery de STMicroelectronics que incluye una pantalla LCD táctil la cual se comunica la parte visual mediante un puerto UART y con comunicación I2C las funciones táctiles. [13]
Desarrollo de Software
Software para el sistema de control
Para el sistema de control se utiliza la tarjeta F28379D de la serie C2000 de TI. Esta tarjeta cuenta con dos núcleos los cuales pueden ser programados de forma en que las tareas se dividan y puedan realizarse de forma eficiente. El primer núcleo se encarga del muestreo de señales y cálculo de estimaciones como se observa en la Fig. 8, mientras que el segundo núcleo se encarga de las comunicaciones con los dispositivos externos. [11]

Software para el sistema de visualización
La rutina realizada para la visualización por medio de la tarjeta STM32F746 consiste en un programa que configura inicialmente los periféricos para después entrar en un lazo infinito que le permite reaccionar ante el ingreso de un comando por parte del usuario. Las opciones que tiene el usuario son mostrar frecuencia, RCOF, tiempo UTC; sincrofasores o componentes simétricas.
Software de la interfaz gráfica en la computadora
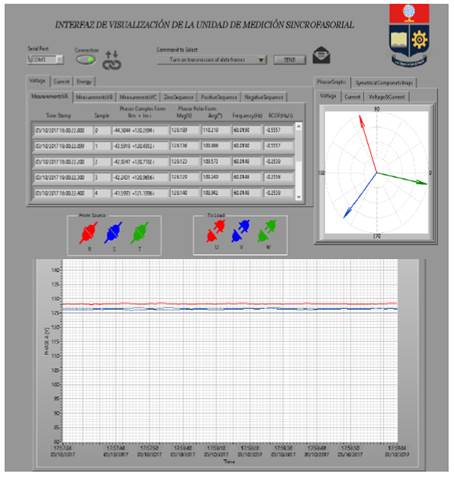
Para la interfaz gráfica se utilizó la plataforma LabVIEW que muestra los datos obtenidos del microcontrolador de forma ordenada en una tabla y de manera gráfica los sincrofasores. También permite enviar comandos para habilitar o deshabilitar el envío de mensajes de datos o estableces la tasa de transferencia de mediciones. En la Fig. 9 se muestra la interfaz implementada.
Costo final del proyecto
Si se toma únicamente en cuanta el costo de fabricación, el precio sería de $895, sin embargo, se debe destacar que al producir más dispositivos en serie existiría una disminución del precio debido al decremento del costo al comprar componentes al por mayor. Tomando como referencia el modelo PMU0100 de la marca VIZMAX cuyo costo es de $10 000,00; se puede notar que el desarrollo de esta PMU tiene una ventaja sustancial en el precio.
En la Fig. 10 se puede observar el dispositivo que se implementó.

PRUEBAS Y RESULTADOS
Pruebas Convencionales
Con el propósito de validar los valores que son medidos por la PMU se compara estos valores con un multímetro Fluke 87V con exactitud de ±0.5%, una punta de prueba de corriente Fluke 800i de exactitud ±3% y el osciloscopio Tektronix TDS2022C. [13]
Prueba de variación de voltaje
La prueba se la realizo con un autotransformador a la entrada de la PMU y en vacío. Los resultados son los siguientes:

Prueba con carga resistiva
Para la prueba de corriente se utilizó una carga de tipo resistiva con conexión estrella con neutro para poder variar la corriente en cada fase. Los resultados se muestran en la Fig. 12:
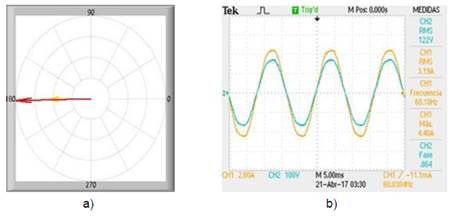
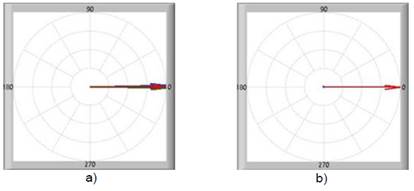
Para una carga resistiva se espera que los fasores de voltaje y corriente se encuentren en fase. Este resultado se lo observa en la Fig 13.
Prueba con carga inductiva
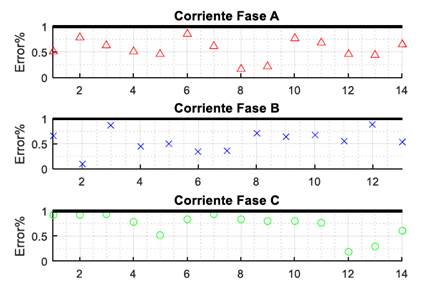
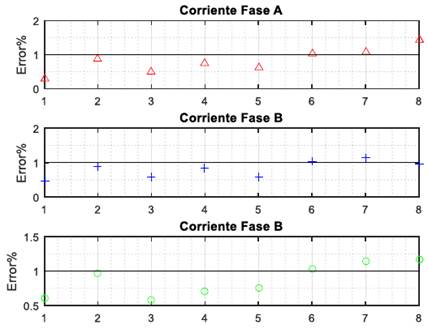
Para la carga inductiva se realizan pruebas de voltaje, corriente y factor de potencia. En la Fig 14 se presentan los resultados de las mediciones tomadas de corriente RMS en función de su error.

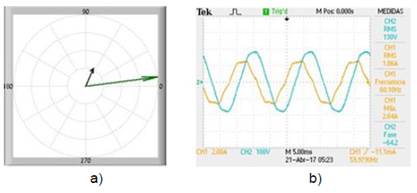
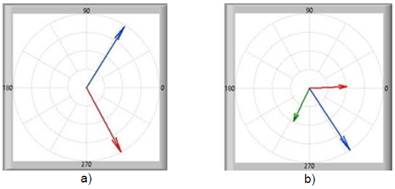
En la Fig. 15 se puede observar el desfase que existe debido a que es una carga inductiva. En color azul se representa el fasor de voltaje y en negro el de corriente.
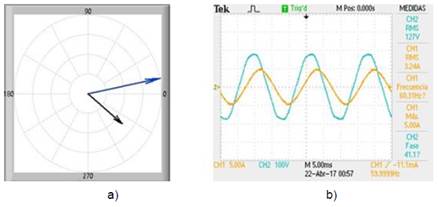
A su vez se realizó una prueba con un motor trifásico y como se puede observar en la Fig. 16 los voltajes y corrientes están retrasadas con respecto a su correspondiente fasor de voltaje.

Prueba con carga capacitiva
Para la prueba capacitiva se utilizó un banco de capacitores en serie con un reóstato. El resultado de las mediciones de corriente RMS tomadas en la fase A se las puede observar en la Fig. 17.
En la Fig. 18 se muestra que el fasor de corriente (negro) se encuentra en atraso respecto al fasor de voltaje (verde).
Pruebas para sincrofasores referentes a la norma IEEE C37
Criterios de evaluación para sincrofasores
El TVE (por sus siglas en ingles Total Vector Error) es una expresión establecida por la norma IEEE C37.118.1 que permite evaluar la diferencia entre un fasor teórico y el estimado por la PMU en un mismo instante de tiempo y bajo condiciones conocidas. Se lo define de la siguiente forma: [14]

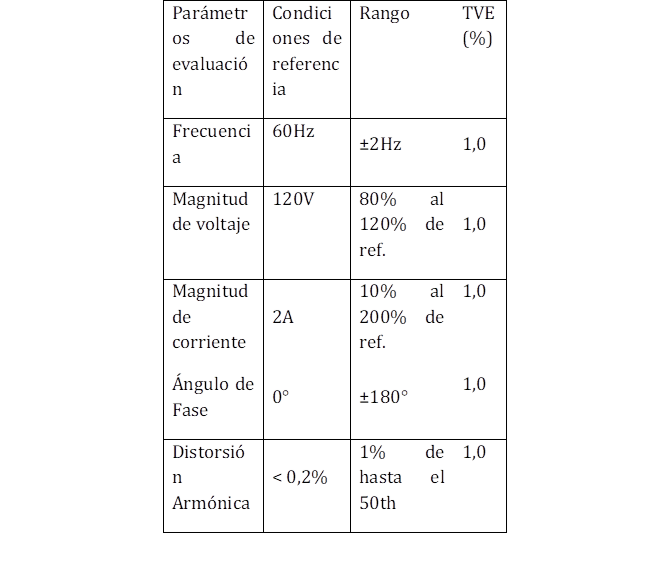
Donde Xr y Xi son la componente real e imaginaria respectivamente del sincrofasor teórico y son comparadas con sus respectivas componentes del sincrofasor estimado por la PMU. Las condiciones de la norma son presentadas en la siguiente tabla: [14]
Pruebas de variación de magnitud
Para este ensayo se mantiene una frecuencia constante de 60Hz, el ángulo de fase en 0° y se simula un incremento de la amplitud entre el 80% y el 120% del valor nominal para la señal de voltaje y para la señal de corriente se realiza una variación entre el 10% y el 200%. El resultado promedio para la magnitud voltaje fue un TVE de 0,206% y para la magnitud de corriente fue de 0,551%
Pruebas de variación de ángulo de fase
Para el ensayo de ángulo se debe mantener un voltaje constante de 120 V, una corriente constante de 2 A y una frecuencia de 60Hz. El ángulo varía entre ±180° y se obtuvo un TVE promedio de 0,78% para el voltaje y de 0,34% para la corriente.
Pruebas para la estimación de componentes simétricas
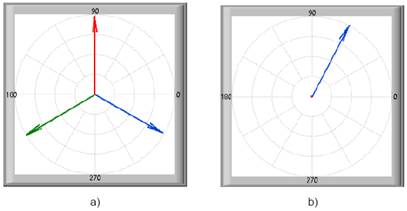
Como se mencionó en secciones anteriores la PMU debe ser capaz de estimar las componentes simétricas. Para este ensayo se analizó las señales de voltaje para obtener las componentes de secuencia cero, positiva y negativa representadas por el color rojo, azul y verde respectivamente. La fig. 19 muestra un sistema ligeramente desbalanceado de secuencia positiva. En la Fig. 20 se muestra el diagrama de una secuencia negativa al intercambiar la conexión entre B y C. Para la Fig 21. Solo se conecta una única fase. En la Fig 22. Se muestra una red desbalanceada donde solo están conectadas 2 fases.

CONCLUSIONES Y RECOMENDACIONES
Se diseñó e implementó un medidor sincrofasorial de baja potencia bajo la norma IEEE C37.118.1 cumpliendo con el objetivo principal de este proyecto.
El algoritmo de la DFT utilizado en este equipo está ajustado para obtener el fasor de frecuencia nominal. En el caso cuando la señal tiene una frecuencia distinta se reportan medidas erróneas lo cual representa una desventaja que requiere la aplicación del algoritmo de corrección. Este nuevo algoritmo representa mayor tiempo de procesamiento. No obstante autoajustar el algoritmo a la frecuencia determinada también requiere que se ajusten parámetros adicionales particularmente el periodo de muestreo de las señales dificultando su implementación.
El equipo está en capacidad de operar en sistemas trifásicos de bajo voltaje balanceados y desbalanceados ya que además de adquirir los fasores que describen al sistema permite determina las componentes simétricas. Esta característica resulta especialmente útil para analizar sistemas trifásicos desbalanceados.
Esta PMU depende del sistema de recepción de GPS para operar. Las mediciones se llevan a cabo únicamente mientras exista el pulso de sincronismo con el GPS. De tal forma que es necesario garantizar la correcta recepción de la señal de GPS colocando el equipo en un área donde exista el mínimo de interferencia.
El sistema de procesamiento debe ser rápido porque al ser un sistema embebido se encarga de sensar las señales y procesar las muestras mencionadas ejecutando los algoritmos necesarios para estimar los fasores. Adicionalmente manejar el protocolo de comunicación en tiempo real requiere alta disponibilidad del dispositivo. En consecuencia, el procesador de doble núcleo de este sistema es adecuado porque permite manejar las comunicaciones y la medición fasorial por separado. De esta manera que no existan conflictos en la ejecución de los procesos mencionados.
Analizando los resultados de las pruebas tradicionales se concluye que el equipo desarrollado tiene una exactitud del 1% cuando las señales que se encuentran bajo monitoreo y no incorporan altos niveles de distorsión. No se toma en consideración los resultados para las señales distorsionadas porque de acuerdo con la norma estos dispositivos deben operar en un sistema con bajos niveles de contenido armónico.
Los errores del TVE encontrados mediante las pruebas en las cuales se modifica un solo parámetro de acuerdo con los criterios de evaluación de la norma IEEE C37.118.1 se encuentran por debajo del límite de precisión establecido. De igual manera el equipo se comunicó con el software que permite verificar que el protocolo de comunicación este de acuerdo con la norma IEEE C37.118.2. Por lo tanto, se puede discernir que el equipo trabaja de acuerdo con el estándar EEE C37.118.
Se recomienda implementar un segundo prototipo de PMU similar al del presente proyecto de manera que puedan ser colocados en distintas ciudades. Con lo cual se puede apreciar realmente la utilidad de los equipos de medición fasorial sincronizados mediante una fuente universal de tiempo.
Para trabajos futuros se recomienda integrar una fuente de respaldo de energía que permita al dispositivo operar cuando se presentan fallos que provocan el corte de suministro eléctrico. Además, se puede incorporar un mecanismo que permita almacenar un registro de las mediciones obtenidas en un sistema de respaldo para almacenar esta información en una memoria externa.
Debido a la falta de recursos en este proyecto no se ha podido realizar una comparación con un equipo comercial y se recomienda realizar diferentes pruebas que

