











 Inglés (pdf)
Inglés (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introduction
Decisions taken in the earlier phases of the architectural design process are considered as crucial due to their impact on the entire process (Mengana & Mousiadis, 2016). As the design process progresses from the early to the advanced stages, it becomes less flexible and slower (Paulson, 1976). Fast and flexible decision-making approaches are commonly used in the early phases to generate ideas. In conventional architectural design, more abstract forms of representation, such as lines, function bubbles, and mass studies are preferred for idea generation due to their simplicity and flexibility (Arpacıoğlu & Ersoy, 2013). Correspondingly, performance-based approaches that can provide rapid simulation and model-based analysis are considered for the architects in addition to their qualitative design decisions for idea generation in the early design phases. Using performance-based design approaches that require expertise in the advanced design phase can cause both cost increase and time loss. Therefore, architects use a variety of performance-based design approaches to add quantitative value to qualitative design approaches. In the scope of this study, daylight is used as a performance based-design criterion.
The use of daylight as a performance criterion in architectural design processes is not new. To expand the use of daylight in conventional architecture, the performance-based design simulates purposeful conditions and it may take advantage of design generation with quantitative data. Moreover, daylight is more effective in the early phases of the design than in the late phases, increasing its impact on the building morphology and the structural mass on design decisions such as the shape of the building, the settlement on the ground, etc. (He et al., 2021). In performance-based design, when daylight is not used in the early phases of design, it usually remains at the level of shell and facade arrangements instead of mass shaping.
This study has two main questions; Can daylight analysis be integrated into mass forming during the early phases of the architectural design process through the cyclic feedback of evolutionary algorithms in a BIM environment? And, can optimal results be obtained from a daylight-oriented mass forming study in the early design phase using the NSGA-II method of Genetic Algorithms or manual selection by the designer? Seeking potential answers to these questions led to the need for a method allowing the integrable usage of various methods, enabling future work to be extended according to the user’s preferred design requirements. One of the reasons for this research was to contribute to filling the gap caused by the lack of analysis-based studies in the early phases of design compared to the later phases of design due to the nature of BIM. In this sense, this study can be considered a decision support approach that does not require expertise in the early design phases.
A workflow was created in Dynamo (Autodesk Revit) with an Algorithm-Aided Design framework to demonstrate how to provide alternative mass design solution proposals to the designer in the early phases of the design. Firstly, a parametric template was created to establish of the interior spaces required for daylight simulation. After that, a simulation was carried out in these interiors with predetermined daylight conditions. However, this study focuses on being useful for non-expert users who want to compare daylight sufficiency for each room rather than more precise daylight efficiency requiring an expert perspective. The initial results were analysed and evaluated by the Genetic Algorithm Approach to reveal optimum evolved results. With consideration of all these factors, the study aims to demonstrate the implementation of a single hypothetical scenario, among various potential setups, in the early phases of design using a highly flexible integration approach in the BIM environment - which comprises the most commonly used tools in the field.
Background
The contribution of Building Information Modelling (BIM) to architectural design is not limited to the currently widely used Object Oriented Design (OOD) logic or the simulation of the static state of the building (Humppi, 2015; Ermolenko, 2020). To expand the potential of BIM in architectural design, Algorithm-Aided Design (AAD) approach offers a framework for emerging new design solutions with more advantageous methods than conventional OOD techniques in BIM.
Algorithmic design is not simply the use of computers to design architecture and objects. Algorithms allow designers to overcome the limitations of traditional CAD software and 3D modelers, reaching a level of complexity and control which is beyond the human manual ability (Tedeschi, 2014).
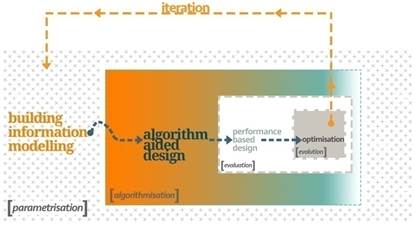
Algorithmic design is not using the power of computers to design; it involves manipulating data collected prior to the design phase (Tedeschi & Lombardi, 2018). AAD is most efficient when it is used to discover what has not yet been found with the collected data, and to augment the human brain’s capacity, especially in mathematical and logical relations. Therefore, in this study, the AAD framework in this study refers to the creation and/or evaluation of design proposals with the aid of algorithms, rather than relying solely on human cognition. Thus, the main contribution of this study is to develop an AAD framework to implement in BIM environment in the early phase of the design to fill the gap caused by the lack of studies with the most common software in architectural practices for the dissemination between non-experts. In order for the AAD framework to create and evaluate design proposals, a tool setup was used to obtain quantitative data with the Performance Based Design (PBD) approach. The quantitative data needed to evaluate design proposals were obtained from daylight simulations and used for the optimisation of the following design proposals. Genetic Algorithms, among evolutionary algorithms, were used as an iterative design approach to optimise the subsequent design proposals (Figure 1). Unlike existing studies (Humppi, 2015; Ermolenko, 2020), this study focuses on the use of daylight as a criterion for PBD.
Additionally, several comparable studies in this field were analysed in light of the established criteria. Five main criteria, within the scope of the study, (Evaluation Criteria (A), Design Phases (B), Structural Sophistication (C), Simulation Repetition (D), Decision Maker (E)) and sub-criteria (Daylight (Illumination) (A1), Thermal Comfort (A2), Energy Consumption (A3), Concept Phase (Early Phase) (B1), Design Development Phase (B2), Construction Phase (Late Phase) (B3), Massing Study (Undetailed Building Components) (C1), Detailed Building Components (C2), Singular (Nonautomatized) (D1), Iterative (Automatized) (D2), By Designer (E1), By Algorithm (E2)) were selected.
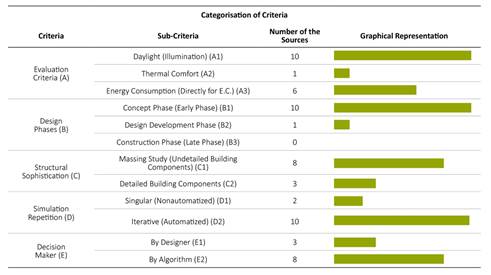
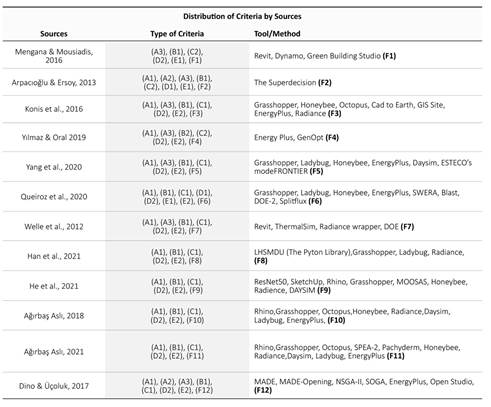
The studies selected from the literature were chosen for their similarity to the present study to more accurately identify the differences between this study and the broader context of related research. Table 1 and Table 2 show that most of the studies are illuminance-based and conducted in the early stages of design, utilising iterative and automated processes. Among the commonly used software, Rhino-Grasshopper and, to a lesser extent, Revit-Dynamo, are preferred as they do not require expertise. In addition to these categories, the algorithm assisted sequencing made with the Revit-Dynamo tool can be integrated for a specific purpose by non-experts. It is evaluated using the logic of genetic algorithms, and the optimum result is then presented to the designer. Thus, the points where the study differs and resembles its counterparts were analysed. The most apparent difference between this study and other studies is the daylight optimisation implementation in the BIM environment, specifically using Optimo and Honeybee together.
Methods
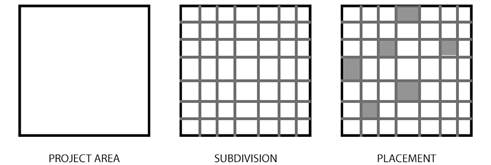
The proposed framework is based on optimising interior space daylight illumination sufficiency with variations of massing study alternatives in the early phase of the design. Numerical data obtained by measuring interior illumination values (lux) are utilised to provide mass optimisation. The measurements are taken using orthogonal grid-based receivers, which can assess daylight levels within the interiors of mass settlements formed by enclosing walls and windows. To achieve this, the designer first subdivided the project area and then studied the placement of masses on a grid-based grid (Figure 2). In the case study, the building in the model is considered a single-story settlement due to the constraints of the chosen daylight simulation tool (Honeybee). The mass study, the initial basis of the studied model geometry, is considered a template that the architect can use as a base. This template is designed in a rectangular prism shape due to the working principle of geometric objects, namely Honey Bee and Ladybug. Due to their working principles, these packages require a single-story orthogonal closed area to be used in later stages. For this reason, the types of forms produced are limited to orthogonal rectangular shapes. In future studies, this could be improved to allow for approaches involving multi-story settlements and different shapes of masses.
The study has limitations, as several architectural design parameters have been disregarded. This is because the study’s primary objective is to generate design ideas by testing the layout of template mass models created during the early stages of architectural design. The test was carried out on a hypothetical model. For example, other parameters affecting the daylight adequacy of the interior such as the number of stories, the settlement of the surrounding buildings, the quest for non-orthogonal shapes, the ratio of the fenestration, structural components, and materials are ignored. The model can include these parameters model to develop a more comprehensive model. In addition, due to the extended simulation time caused by including numerous parameters in the model, this study, aiming to promote wider adoption, focused solely on single-objective optimisation as a simplified hypothetical example.
Besides, many decisions are limited due to the tools chosen for the study. For example, Honeybee, one of the selected tools, needs an orthogonal, closed area to measure daylight. Furthermore, Honeybee does not work efficiently with all daylight measurement methods to provide optimisation with Optimo. Some daylight methods take too long to evaluate for optimisation in Optimo as it outputs the annual value average or a percentage of daylight as a value. At the outset, these options were deliberately excluded from the study to ensure practicality and adhere to the principle of promoting widespread adoption, which is one of the study’s objectives.
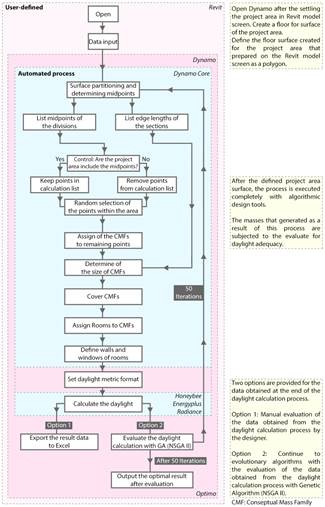
The proposed method evaluates the composition of masses generated randomly using the logic of Genetic Algorithms and daylight calculation. The aim is to generate an optimal mass solution proposal for designers during the early stages of the design process. According to the designer’s preferred solution, this mass composition can be evaluated with a manual (option 1) or a genetic algorithm-assisted approach (option 2). Thus, the tool’s operation is automated and user-defined periodically, following the framework and within the constraints of the interface throughout the process. The operation of the whole process can be seen in the Algorithm flowchart of the model (Figure 3) in the context of automation, user-defined sections, and the interoperation of the selected tools (software) with each other.
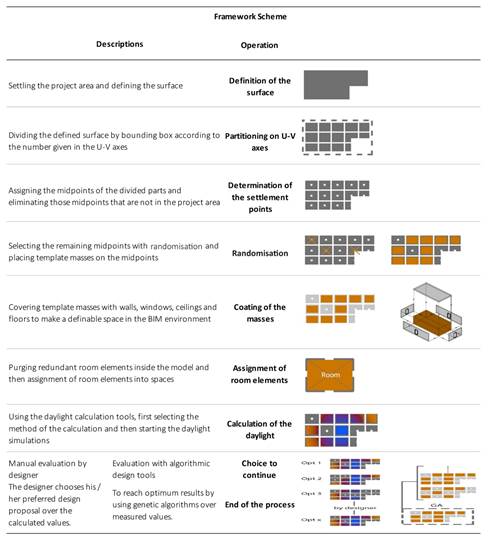
Mass compositions were obtained with template masses positioned at the subdivisions’ midpoints. Initially, these template masses were created to match the size of the partitions formed by randomly selected numbers within the project area. The process of area subdivision and mass placement in the middle of the partitions was repeated for a specified number of iterations (50 iterations in this case), allowing the numbers to converge to the optimum result with each subsequent generation. The framework scheme of the whole study is shown below (Table 3).
In architectural praxis, Sculpting/Digital Sculpting modelling which corresponds to Object-Oriented Design Modelling (Revit, Archicad, etc.) or Geometrical Design Modelling (Non-Object Oriented) (3DMax, Sketchup, etc.) in architectural design modelling, is preferred due to its practicality. Consequently, the potential of Visual Programming, which is preferred in a limited capacity within architectural practice, is not fully utilised in the discipline of architecture. For this reason, the objective is to enhance the research potential and contribute to architectural practice by attempting to utilise Autodesk Revit Software, which architects commonly use. A model of the framework is created in Dynamo, an open-source visual programming application that can interact with Autodesk Revit Software, to enhance its parametric capabilities and incorporate the AAD framework.
The process starts within Revit screen, which provides a grid-based (orthogonal grid) workplace for mass settlement workspace, constructed within a building area and its environment. In the next step, the EnergyPlus weather (EPW) file is selected based on the location information of the study area, which, in this case, is Istanbul. The climatic data, including the region’s annual or instantaneous daylight intake effects, are then transferred to the Dynamo interface and interact with the Revit screen. In the final step, the Honeybee package within Dynamo simulates interior illumination by utilising a grid-based surface area. The results are then evaluated using Optimo, one of the commonly used Genetic Algorithm packages within Dynamo.
All approaches offer various options. The form generation part can be based on randomness, or the user can choose to fix certain parts of the masses. Honeybee and Ladybug provide several daylight calculation methods (Daylight Coefficient, Daylight Factor, etc.) that can be chosen according to preference. In the evolutionary algorithms section, the fitness function is determined based on the structure of Genetic Algorithms and can be specified according to user preference or design priority. In this study, the fitness function is defined as the ratio of the number of rooms within the specified lux value range (300 lux to 1000 lux) that meet the arithmetic mean of measured values, to the total number of rooms. However, this fitness function description can be revised to align with specific design requirements. One of the original contributions of this study is its ability to facilitate this flexible integration. The relationship between the methods, tools, and applications of all approaches used in this study are presented in the following diagram (Figure 4).

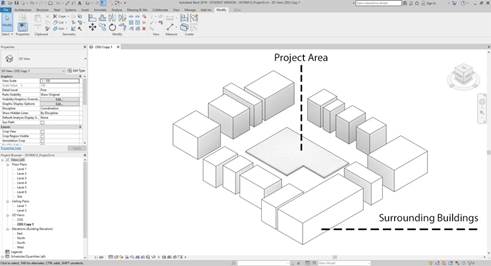
A site plan was created within the Revit main modelling screen interface to determine the surrounding buildings and the project area. In the Dynamo application, a floor was explicitly generated for surface identification (Figure 5). This area was considered a project (construction) area. Therefore, the boundary of the floor area is used to define the boundaries of the mass settlement which will be explained in the next phase. Surrounding buildings were included in the model to obstruct daylight from reaching the masses within the project area. However, it was observed that Honeybee and Ladybug tools did not consider these buildings during daylight evaluation. The reason is that Honeybee utilises Revit Room objects, which can only define model components (such as walls, windows, floors, and ceilings) within the enclosed space. As a result, the surrounding buildings cannot be considered for daylight calculations since they fall outside the boundaries of the Revit Room, which is limited to the interior space.
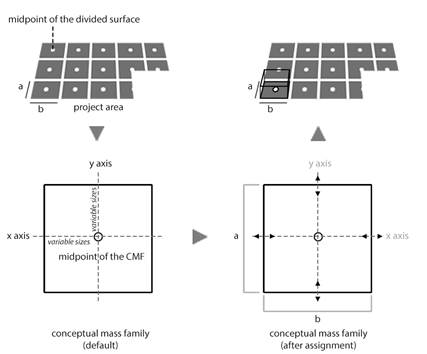
The Conceptual Mass Family (CMF) provided by Revit was chosen for mass placement. CMF is one of the five study available file formats in Revit. This family (CMF) was designed with the desired parameters, specifically as a rectangular prism that can be used to represent walls, floors, and windows. The template is designed with three fundamental parameters (length, width, height) to define the dimensions of this template base in 3D (Figure 6).
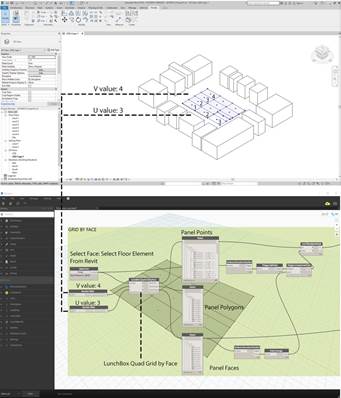
To define the surface area, a floor element is created and divided “LunchBox Quad Grid by Face” node in UV axes. This division helps the sizes and location points of the CMF elements. To constrain the parametrical values of U and V, the resulting parts (the construction system was considered to be a reinforced concrete structure) are limited within the maximum and minimum clearance distances of the structural supports (maximum=8 meter, minimum=3 meter) (Figure 7).
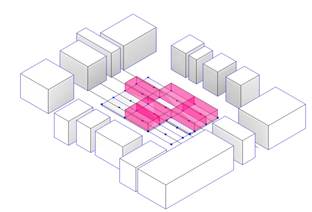
Following the division process, the centres of the Conceptual Mass Families, which serve as bases, were determined by assigning one point to the middle of the rectangles obtained. These points were randomly selected using the “Random List As Element” node. Once the random selection was completed, the Conceptual Mass Families were placed, resulting in a potential mass settlement (Figure 8). At this stage, two of the three different parametric properties of the placed masses (length and width) were determined by connecting them to the lengths and widths of the fractions. The remaining feature (height) was manually determined based on user preference.
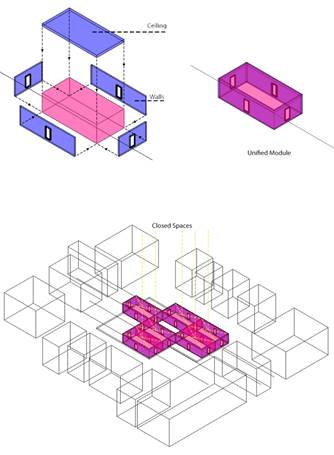
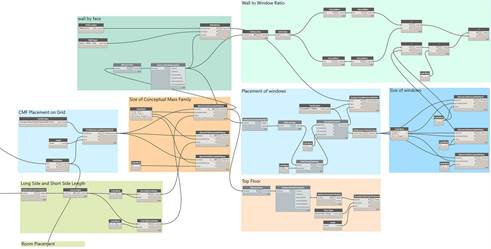
After the Conceptual Mass Family (CMF) settlements are used as the structural template, the walls, windows and floors are covered on the CMF (Figure 9). Walls, windows and floors used as building elements are required to establish the Revit Rooms, which are in turn required by the Honeybee plugin in Dynamo to work (Figure 10).
Source: Authors (2019)
Figure 9: Covering with walls, windows and ceiling on the Conceptual Mass Family
Source: Authors (2019)
Figure 10: Covering with walls, windows and ceiling on the Conceptual Mass Family - Dynamo algorithm definition
To define Revit Rooms, windows, walls, floors, and ceilings are necessary. Using the Honeybee plugin, these rooms serve as the boundaries for calculating daylight value (lux). The rooms have been identified as the boundaries of the calculation area. In the initial stage of Honeybee, it starts by collecting rooms and spaces. It creates a list of elements within the room that are enclosed walls and windows, considering solid (walls) and void (windows) (Figure 9).
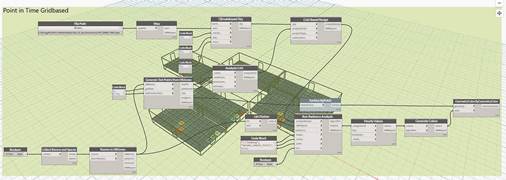
The proposed framework employs Honeybee, Ladybug and Radiance plugins in Dynamo for sufficiency of the illumination in interior spaces for the simulation of daylight to calculate the effects of daylight in the illumination in interior spaces. Various types of daylight models, such as daylight factor (Mardaljevic, 2000), climate-based modelling (Mardaljevic, 2006), and daylight coefficient, are employed to calculate the effects of daylight on interior space illumination. The Honeybee’s package for Dynamo enables the evaluation of interior space daylight sufficiency within interior spaces, which is crucial for generating alternative initial mass studies. The proposed framework uses point in time grid-based (PITGB) method, which simulates the daylight at the selected time and location (Figure 11). The working principle of PITGB is based on the calculation of daylight illuminance over a predetermined place and time. Point-in-time simulations fall under the Sunlight analyses category and are a fundamental companion to the Daylight Factor. While the Daylight Factor tests only cloudy conditions (overcast) PITGB allows for the utilisation of different climatic characteristics, such as the quantity and angle of daylight. Also, since Daylight Autonomy expresses a percentage, PITGB provides a direct numerical value for sunlight, making it more useful for evaluations in evolutionary algorithms. Although it may not be the ideal measurement method for massing the building layout, it was selected for a hypothetical case study to explore potential future development. For more comprehensive daylight analysis, specialised studies and expertise should be employed (TUDelft: Honeybee Tutorial 2: Daylight Analysis with Radiance, 2023). In this case study, Istanbul and December 21 (winter solstice, when the sun is at its lowest altitude) were selected as the assumed darkest day of the year to examine the minimum light sufficiency, taking into account tool constraints. The origin of the evaluation range in this study is based on Useful Daylight Illuminance (UDI). UDI values represent the annual occurrence of illuminations on the working plane within the range of 100 lux to 2000 lux. The desired illuminance is typically taken as a minimum of 500 lux for office work, while daylight illuminations exceeding 2000 lux can lead to visual disturbances (Nabil & Mardaljevic, 2006). In this study, since the masses under consideration serve as housing functions, the minimum illumination value is determined as 300 lux, and the maximum illumination value is 1000 lux.
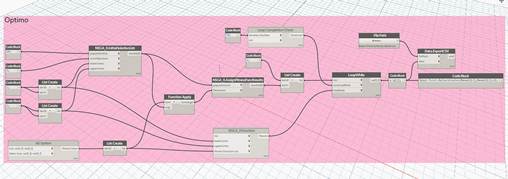
“Optimo”, the Genetic Algorithm tool in Revit Dynamo, was selected to choose among the design proposals produced by evaluating the daylight calculation data. “Optimo is a multi-objective optimisation tool that is part of BIM-based Performance Optimisation (BPOpt) and is and is specifically designed for use inDynamo” (Optimo website, 2019). It is an open-source software based on visual programming and Multi-Objective Optimisation (MOO) (Deb et al., 2000). Optimo is developed to interact parametrically with Autodesk Revit for BIM-based optimisation (Asl et al., 2015). Optimo has an evolutionary algorithm approach. It uses Nondominated Sorting Genetic Algorithm-II (NSGA-II) for Multi-objective Optimisation (MOO) (Deb et al., 2000). This approach helps designers optimise multiple conflicting objectives and provides a set of optimal solutions (Figure 16). Although this case study focuses on single-objective optimisation, Optimo was chosen for its capability of multi-objective optimisation, which could be beneficial for future projects if desired.
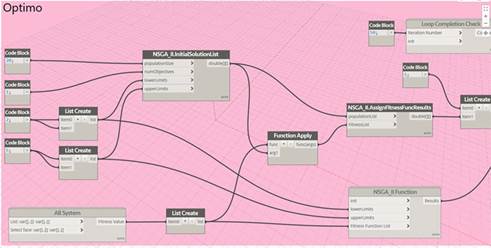
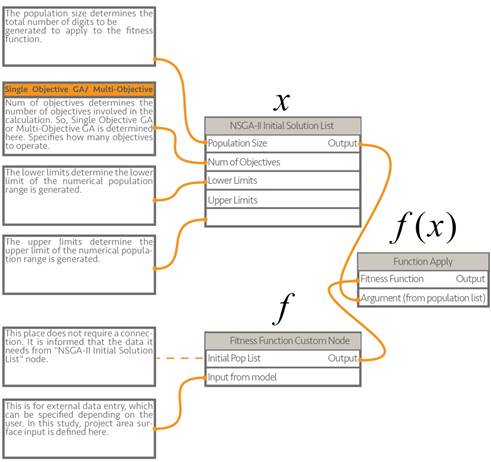
Working in Optimo begins by first specifying the inputs of the “NSGA_II_Initial Solution List” node. The Population Size determines the total number of the population used. The “NumObjectives” node determines the number of tasks considered together. The Lower and Upper Limits determine the range of the random numbers selected in the population. These operations are standard procedures for Optimo in each study. On the contrary, the fitness function part is specially designed for each task. In this study, the “All System” node encompasses the algorithm responsible for generating the masses and their placements. All other operations are consolidated into a custom node to be executed within the “Function Apply” node. This node facilitates the generation of initial population results by processing each produced population member using the settings specified in the “Function Apply” node (Figure 12).
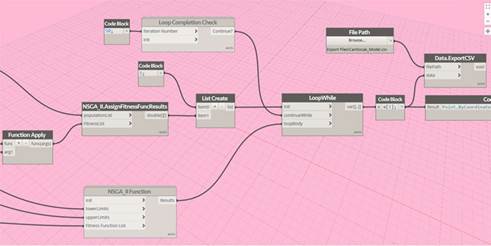
The “Function Apply” node results are then passed to the “NSGA-II AssignFitnessFuncResults” node to obtain the first output values. These output values are iteratively processed in the “LoopWhile”node, based on the specified number in the “Loop Completion Check” node (Figure 13). Simultaneously, in the “NSGA II Function” node the user defines the upper and lower limits at the beginning; and the user-defined fitness function node (All System node) is executed as the Loop Body, following the logic of NSGA II. The resulting data from the Loop Body is added to the “LoopWhile” node to complete the optimisation process (Figure 16). Throughout the entire setup, the data of each generation is exported to a CSV format (Excel file) using the “DataExportCSV” node. Concurrently, the output data obtained is used as input for the algorithm. Optimo’s standard algorithm offers limited options that can be adjusted through user interfaces (Figure 13), making it ideal for non-expert designers. This section of Optimo requires the determination of numerical options, such as population number, number of objectives, and lower and upper limits, following standard genetic algorithm schemes (Figure 14).
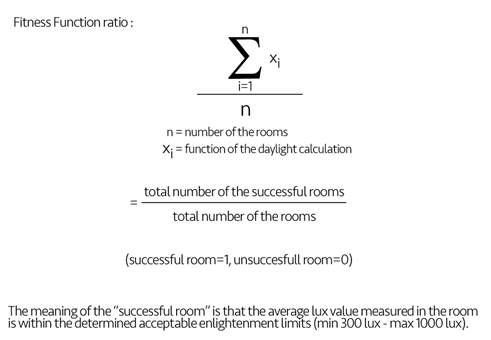
However, perhaps the most crucial option is the “FitnessFunctionCustomNode”. This option allows the designer to determine the criteria by which the results obtained from the processed population members will be included in the success scale. In this study, the success criterion is based on the average lux value of daylight in the room, which should fall within acceptable illumination limits for most room functions according to UDI (min 300lux - max 1000lux) (Konis, 2013) (Brembilla et al., 2017). This criterion, referred to as the Fitness Function ratio, is defined as the ratio of the number of rooms with an average indoor lighting value that meets the sufficient enlightenment criteria to the total number of rooms generated in each generation (Figure 15).
A “successful room” in this context means that the average lux value measured in the room fall within the determined acceptable enlightenment limits (minimum 300 lux - maximum 1000 lux) (Brembilla et al., 2017).
Thus, the evaluation part of the constructed algorithm with the genetic algorithm was completed (Figure 16).
Results
After completing all the algorithm sequencing, the algorithm was run for 50 iterations. The results for each iteration were exported in CSV format (Excel format), and a visualisation of the design proposal containing the values expected to be “optimal” at the end of the process was generated (Figure 16). For the visualisation, the “Hourly Values” node provides values corresponding to each cell’s daylight radiance (lux). These values are conveyed to the basic Dynamo Node - “Generate Colours” node, which assigns colours based on the values and legend parameters. The visualisation depicts the colours based on a spectrum ranging from red to blue, where the blue cells represent relatively low lux values, and the colours gradually transition towards red as lux values increase (Figure 17).
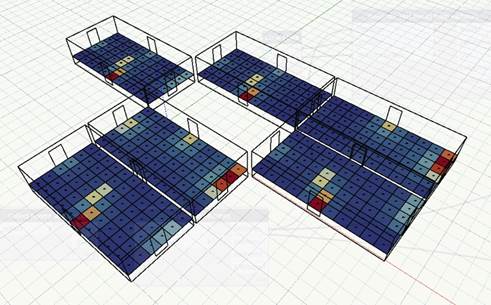
The proposed framework does not focus on the distribution of daylight in the room but rather measures success based on whether the average values of each cell in the room fall within the specified range (min 300 lux - max 1000 lux) (Brembilla et al., 2017). After the algorithm was run for 50 iterations, only the design proposal with the highest fitness function ratio (FFR) was obtained with visual output in accordance with Optimo’s working principles. Simultaneously, the numerical data from the remaining 49 design proposals and the one that achieved the highest fitness function ratio (Figure 18).
At this stage, the graph depicting the results obtained from running the system for 50 iterations was transferred to the table (Figure 19). The system generated a visual representation of the design proposal with the highest FFR.
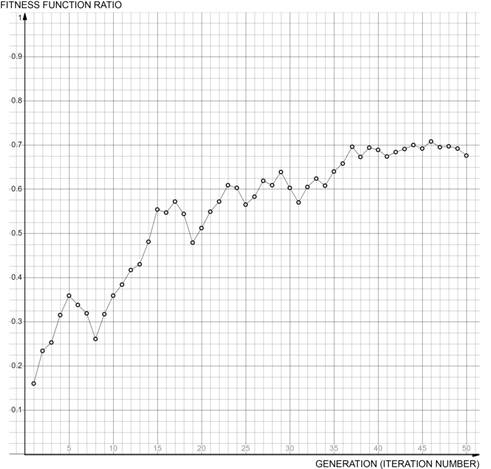
The proposed framework of the algorithm focuses on generating a new input value that narrows the randomness interval for the generation of the next generation based on the FFR rate received after each generation of design proposals. This approach aims to achieve higher FFR results in subsequent generations. However, due to the nature of NSGA-II, a new generation was produced that would have mutations by resetting the randomness after a few generations. This ensures that the FFR does not remain confined to a partial peak range as seen in the 5th generation of the graph. The design proposal with the highest FFR, seen at the top of the graph, is exported as output.
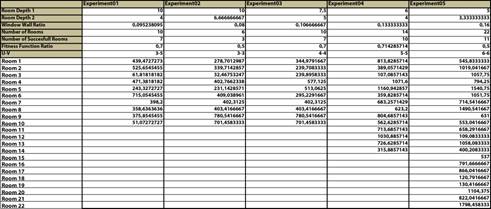
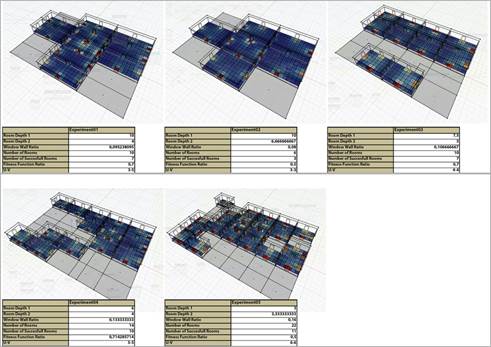
After running the algorithm, the results from the experiments are as follows (Figure 20). Each experiment outputs the design proposal with the highest FFR among its 50 generations as the final product. It can be seen that the results obtained from the algorithm may include different sized masses coming together in various combinations.
Discussion and conclusions
This study presents a proposed algorithm-aided design framework for using daylight in the early phases of architectural design. The aim of the study is not only to concentrate on the case study but also to gain a comprehensive understanding of the proposed approaches. Although the BIM environment contributes to architectural design with developing technology, integration with the Algorithm-Aided Design framework has certain limitations. The primary motivation behind this study is the separate advancements of these two approaches (BIM and AAD) in their respective fields of work and the need to overcome integration difficulties resulting from their differing working principles. The key challenges in integrating these two approaches lie in their fundamental differences.BIM’s Object-Oriented Design approach requires a definition or a set of rules based on the structural relationships of elements in the model. BIM controls objects with parameter data. However, AAD primarily focuses on geometric modelling without incorporating semantic data. When algorithms are employed to generate geometry, the commonly used AAD approach revolves around modelling geometry without additional information beyond its geometric properties. In this study, the term Algorithm-Aided Design does not mean the algorithmic coding inside the tool but the design by algorithms created/composed by the designer. It has been observed that these two approaches can work together in harmony in working frameworks made within properly constructed working frameworks. Additionally, the study has provided evidence supporting the initial research questions: Can daylight analysis be integrated into the early stages of architectural design through iterative feedback from evolutionary algorithms within a BIM environment? Can optimal results be achieved in a daylight-focused mass formation study using the NSGA-II method of Genetic Algorithms or manual selection by the designer?
With regard to studies on the implementation of Genetic Algorithms from Evolutionary Algorithms which evaluate Performance-Based Design, the generation of design proposals has been achieved. The chosen Algorithm-Aided Design tool for evolutionary algorithms is Dynamo, and Optimo is Dynamo’s widely utilised optimisation package. The fitness function has been successfully tested in various examples providing proof of concept.
This study distinguishes itself from others in the field by utilising widely used software that does not require extensive expertise, thus offering more opportunities for practical implementation in architecture. The aim of the study is to demonstrate the implementation of a hypothetical scenario within the BIM environment’s early design phase, incorporating the most widely used tools in the field.
The contribution of this study, which differs from other studies in its field is that it is carried out with the most widely used software that does not require expertise, and it provides more opportunities for its use in architectural practice than others. The study aims to show the implementation of only one hypothetical scenario among the scenarios open to different setups, with a very flexible integration, for the early phase of design in the BIM environment which consists of the most widely used tools in the field.
For future studies, the Algorithm-Aided Design framework offers the potential to explore different setups and configurations, allowing for diverse studies. In addition to various mass formation approaches, daylight-related investigations, such as window widths, glass transmittance, fenestration, level of glare, etc., can also be evaluated in different ways within the framework.

