











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkForma sugerida de citación:
Luna, M.; Moya, J.; Aguilar, W.; Abad, V. (2017). «Robot salamandra anfibio con locomoción bioinspirada». Ingenius. N°. 17, (Enero-Junio). pp. 51-59. ISSN: 1390-650X.
1. Introducción
La salamandra es un anfibio cercano a los primeros tetrápodos [1], cuya dinámica de movimiento requiere un gasto energético bajo respecto a las dimensiones de su cuerpo, a diferencia de los robots terrestres de estructura cuadrúpeda [2, 3] o aéreos de estructura cuatirotor [4, 5]. Cuando la salamandra se desplaza en tierra, la forma de movimiento que utiliza es la reptación, es capaz de moverse utilizando pequeñas extremidades. La dinámica de movimiento de la salamandra es óptima desde el punto de vista de consumo energético y adaptable a diversos entornos [6, 7], por lo que algunos de los robots bioinspirados utilizan esta estructura.
Cuando la salamandra se desplaza en tierra el movimiento lo lleva a cabo coordinando las extremidades en forma de X (se mueven la pata superior derecha junto con la inferior izquierda y viceversa). Adicionalmente, la espina dorsal lleva a cabo un movimiento oscilatorio que contribuye al movimiento general de la salamandra. En agua, las extremidades son orientadas hacia la parte trasera permitiendo que la mayor parte del trabajo lo realice la espina dorsal [4]. Las patas de la salamandra gigante son pequeñas respecto a su cuerpo y no contribuyen significativamente a la locomoción del animal.
Estudios realizados en [9] y [8] muestran que la locomoción de la salamandra depende en mayor medida de la espina dorsal. En animales con extremidades pequeñas, la flexión lateral de la columna contribuye al movimiento en entornos acuáticos y facilita el movimiento en entornos terrestres [1]. En [10] se analiza la cinemática de la salamandra para usarla como base de algoritmos de locomoción en robots. En ese trabajo los autores utilizan técnicas de seguimiento de movimientos y calibración de cámaras de video.
En la literatura se puede encontrar un amplio número de robots inspirados en morfología animal como: serpientes [11–14], peces [15], langostas [16], hexápodos [17], entre otros. Algunos robots, presentados en [18] y [19], no tienen estructuras bioinspiradas, no obstante, se pueden desplazar en ambientes acuáticos y terrestres.
Existen pocos prototipos de robots salamandra como el descrito en [1] que cuenta con dos grados de libertad (DOF) para la columna vertebral, y dos para cada extremidad. Sin embargo, la movilidad de este robot es limitada y está enfocado en estudios biológicos. El Pleurobot presentado en [20] es un robot autónomo terrestre con cuatro grados de libertad en cada pata y utilizado en aplicaciones de rescate. En [21] se presenta un robot salamandra autónomo, capaz de caminar y nadar, con diseño hidrodinámico y modular. Algunos robots con patas y columna vertebral flexible son construidos por aficionados, con descripciones en Internet, no orientados a propósitos científicos.
Nuestro enfoque propone la utilización de materiales de bajo costo para la construcción de un robot teleoperado, con estructura modular hidrodinámica, utilizando un número de articulaciones reducido para simular el movimiento de la salamandra y desplazarse en entornos acuáticos y terrestres.
El resto del artículo está organizado de la siguiente forma: En la siguiente sección, se presenta una descripción del diseño de nuestro prototipo propuesto. Los resultados y discusión son presentados en la sección 3 y, finalmente, la sección 4 está destinada a conclusiones y trabajos futuros.
2. Diseño del prototipo
2.1. Diseño mecánico
El sistema debe ser capaz de desplazarse en entornos acuáticos y terrestres, es decir, que debe ser impermeable. Para garantizar la impermeabilidad del sistema se llevaron a cabo pruebas en las que se sumergió en agua cada uno de los elementos, durante una hora, a una profundidad de un metro y se comprobó que no existiesen filtraciones. Otra de las características que el robot debe poseer es la flotabilidad. El esqueleto se ha construido con polietileno, un elemento con una densidad menor a la del agua (0,905 g/cm3).
Cada una de las secciones del cuerpo de la salamandra ha sido diseñada en un software CAD (Computer Assistance Design) y se describen a continuación:
1) Espina dorsal
La espina dorsal está constituida por cuatro módulos con el objetivo de alcanzar una flexibilidad comparable con la de la salamandra. Cada módulo contiene en su interior elementos mecánicos de transmisión de movimiento y componentes electrónicos que serán explicados en la sección 2.2. Los módulos se han diseñado con base en estructuras previas propuestas en [11], [22], [10], en las que cada módulo posee un DOF y está conformado por cuatro partes estructurales: cuerpo, tapa y dos conectores. (Figura 1). Los componentes mecánicos como electrónicos deben ser distribuidos en el interior de los módulos optimizando el espacio.
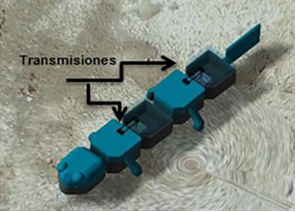
El diseño modular permite que las piezas puedan ser montadas y desmontadas de forma rápida. Los daños en un componente no comprometerán a todo el sistema. En la Figura 1 se puede observar que los módulos no son cúbicos sino poliedros lo que mejora su desempeño hidrodinámico. Los dos motores encargados del movimiento de la columna se encuentran acoplados a una transmisión tipo cadena en el interior de cada módulo. Estos motores son los responsables del movimiento de la espina dorsal como se muestra en la Figura 2.
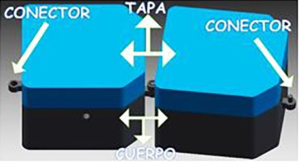
Figura 1 Partes estructurales del cuerpo. Los conectores tipo acople permiten la transmisión de movimiento entre módulos y la tapa brinda facilidad para montar y desmontar el circuito electrónico y los elementos mecánicos.
2) Extremidades
Las extremidades poseen un DOF y están unidas a los elementos del cuerpo a través de un eje. A diferencia del animal real, tienen la capacidad de rotar 360 grados, sin embargo, su función es similar. En la Figura 3 se puede observar el diseño 3D de las extremidades.
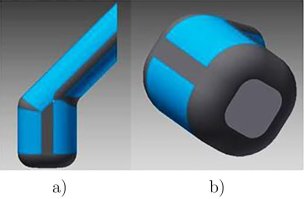
Durante la natación, las extremidades giran hacia atrás hasta alinearse con el cuerpo lo que permite al robot desplazarse con menor resistencia hidrodinámica. En la parte inferior poseen una superficie plana que maximiza el contacto con el suelo y la fricción necesaria para la tracción al caminar (Figura 3).
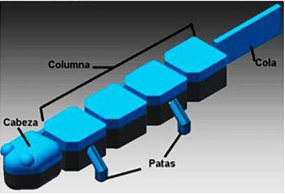
El diseño completo del prototipo se presenta en la Figura 4.
2.2. Diseño electrónico e interfaz
El circuito del robot se alimenta de forma centralizada con una batería de litio para cuatro servomotores, un microcontrolador, dos encoders rotativos y un módulo bluetooth. La distribución de los elementos electrónicos se presenta en la Figura 5.
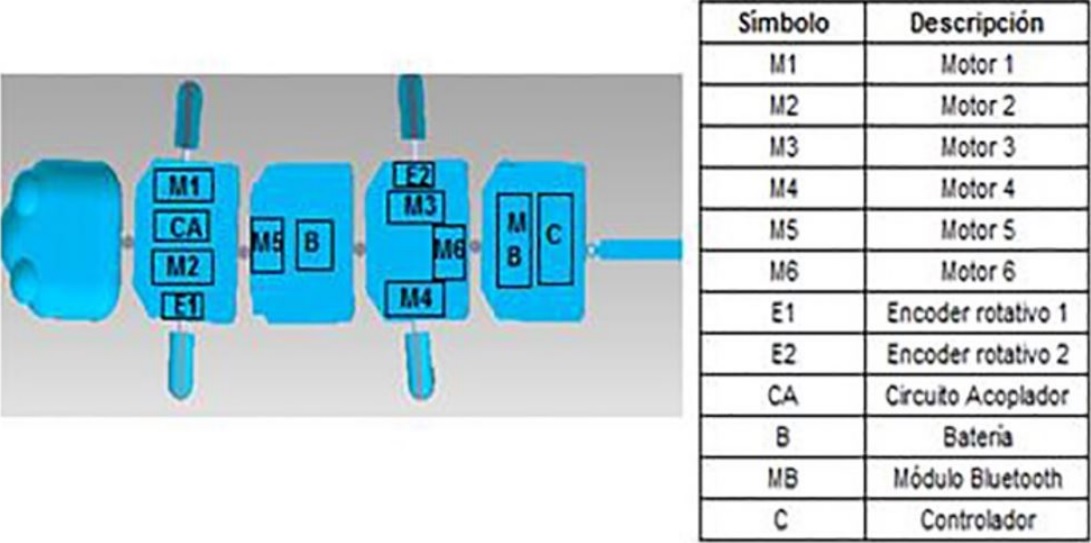
Se implantó un circuito de acondicionamiento para regular el voltaje de la batería de litio de 9 a 5 V usado en la alimentación del microcontrolador y el módulo bluetooth. El microcontrolador posee una interfaz serial para la transmisión y recepción de datos a través de una aplicación en Android.
Los servomotores de las patas se han acondicionado para la obtención del giro de 360 . La posición y el giro se controlan mediante PWM (modulación por ancho depulso), con base en los datos obtenidos de un encoderrotativo electromecánico acoplado a una transmisióncircular.
Para la selección del tipo de transmisión se realizaron pruebas utilizando engranes y poleas, cuyos resultados pueden ser observados en la sección 5.
En el movimiento oscilatorio y la posición de la columna se utilizan dos servomotores truncados controlados por una segunda señal PWM.
Se desarrolló una aplicación para dispositivos inteligentes que permite controlar al robot mediante comunicación bluetooth. La interfaz humano-máquina (HMI) desarrollada para teleoperación se presenta en la Figura 6.

Figura 6 Interfaz de teleoperación del robot. Antes de iniciar es necesario que el usuario se conecte al robot por medio de bluetooth.
La interfaz de teleoperación recibe los comandos de alto nivel y ejecuta las acciones de control con base en los algoritmos de movimiento. El prototipo implementado se puede observar en la Figura 7.

2.3. Algoritmos de movimiento
Con base en el movimiento observado en el animal, se han diseñado dos algoritmos de locomoción (uno para agua y uno para tierra), los mismos que se presentan a continuación:
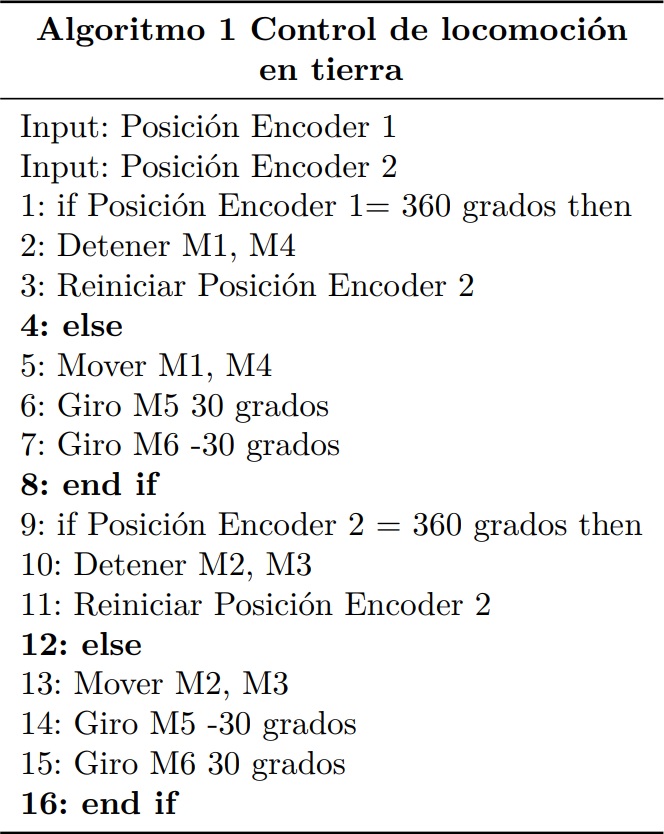
En el algoritmo 1, el movimiento de las patas se lleva a cabo de forma simultánea con la espina dorsal lo que magnifica el movimiento.
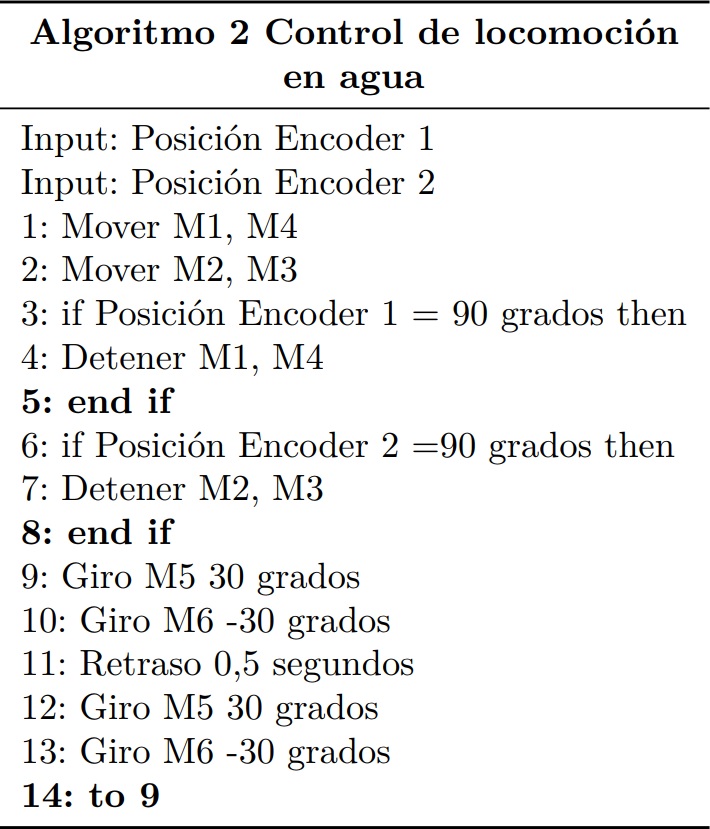
En el algoritmo 2, la oscilación de la espina dorsal es más rápida, las patas se ubican hacia atrás en posición de nado permitiendo al robot desplazarse con su columna vertebral.
2.4. Comparación con otras propuestas
En la Tabla 1 se muestra una comparación de nuestro enfoque con prototipos propuestos en la literatura. Se analizan parámetros de diseño, debido a que en la literatura no se encontraron parámetros estandarizados de eficiencia.
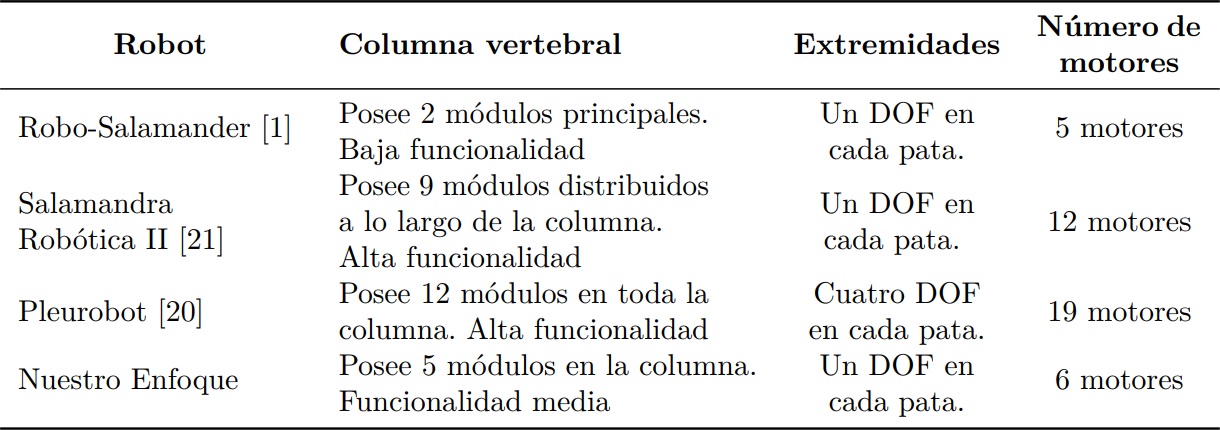
En la Tabla 1 se observa la cantidad de módulos y motores utilizados en robots salamandra encontradas en la literatura. Nuestro prototipo presenta una complejidad media y utiliza un número reducido de elementos para su movimiento. El movimiento obtenido utilizando este diseño se ha comparado con el de una salamandra real; los resultados del desempeño del prototipo son presentados en la sección 3.
3. Resultados y discusión
Para analizar y comparar el movimiento del robot con el movimiento de una salamandra real, se tomó como referencia un video en perspectiva cenital de la caminata de una salamandra real que se encuentra disponible en [26]. Utilizando morfología matemática se llevó a cabo la esqueletización de las imágenes obtenidas (Figura 8) y se extrajo el movimiento de la salamandra sin considerar sus extremidades.

Figura 8 Esqueletización de la imagen para comparación de movimiento. (a) Imagen original (b) Imagen esquelet zada.
3.1. Simulación
Una vez adquiridos los datos del movimiento real del animal se realizó una simulación cinemática descomponiendo al robot en eslabones y articulaciones (Figura 9).
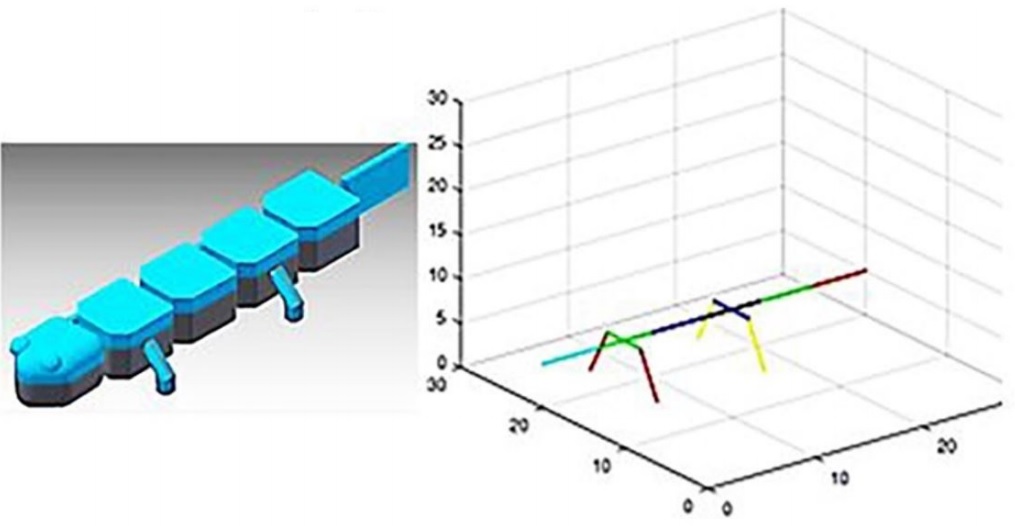
Esta simulación se la realizó mediante geometría computacional [23] utilizando el diseño propuesto. Una vez verificado el comportamiento cinemático del esqueleto de la salamandra se hizo una simulación CAD de la estructura completa.
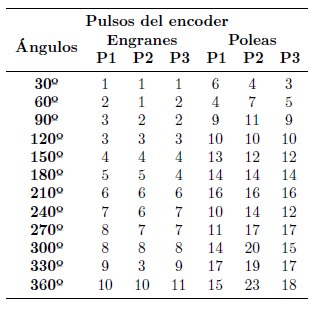
3.2. Acoplamiento de encoder
Para la selección del acople del encoder se realizaron pruebas con dos tipos de transmisión: poleas y engranes. Se obtuvieron diferentes ángulos como respuesta al conteo de pulsos del encoder Los resultados se muestran en la Tabla 2. Y de forma gráfica en la Figura 10.
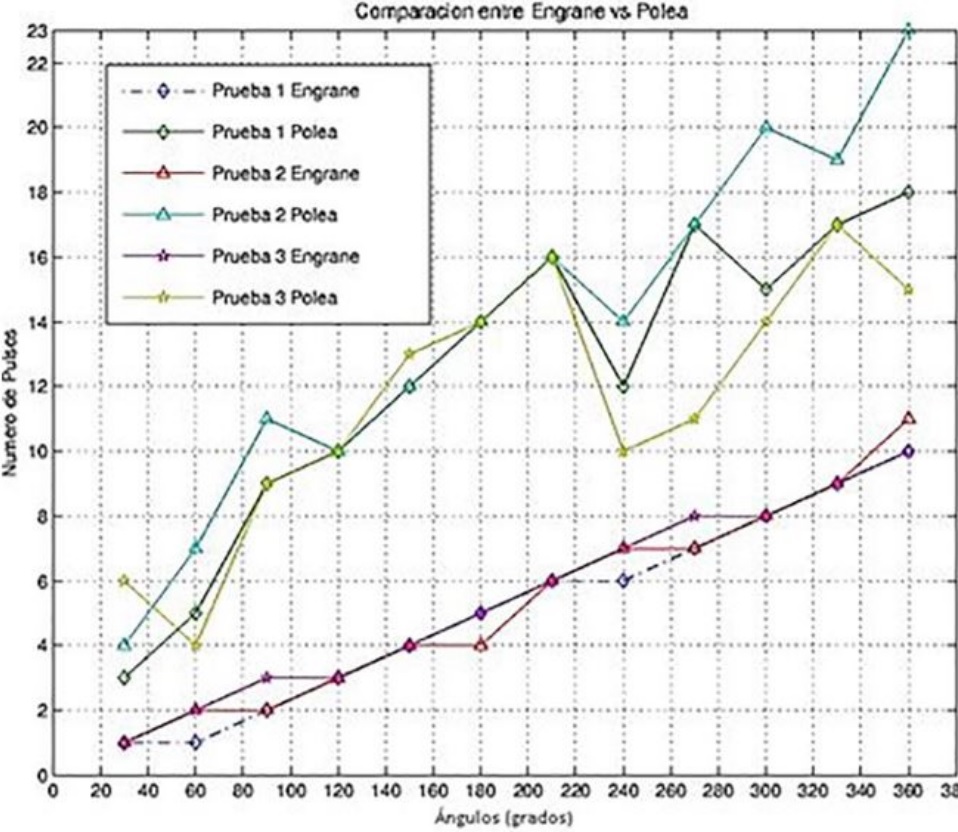
Para un adecuado funcionamiento del acople se requiere que la respuesta del encoder sea lineal. Como métrica de evaluación se tomó el coeficiente de determinación para la regresión lineal, cuya fórmula viene dada por la ecuación 1.

Donde:
 Es la covarianza de (X, Y)
Es la covarianza de (X, Y)
 Es la desviación típica de la variable X
Es la desviación típica de la variable X
 Es la desviación típica de la variable Y
Es la desviación típica de la variable Y
El coeficiente de determinación es mejor mientras sea más cercano a 1. El promedio del coeficiente de determinación para las tres pruebas en engranes y poleas se muestra en la Tabla 3.
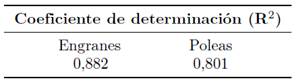
Basándose en los resultados obtenidos en la Tabla 3 se eligió la transmisión por engranes porque su R2 está más cerca del 1 en comparación con las poleas.
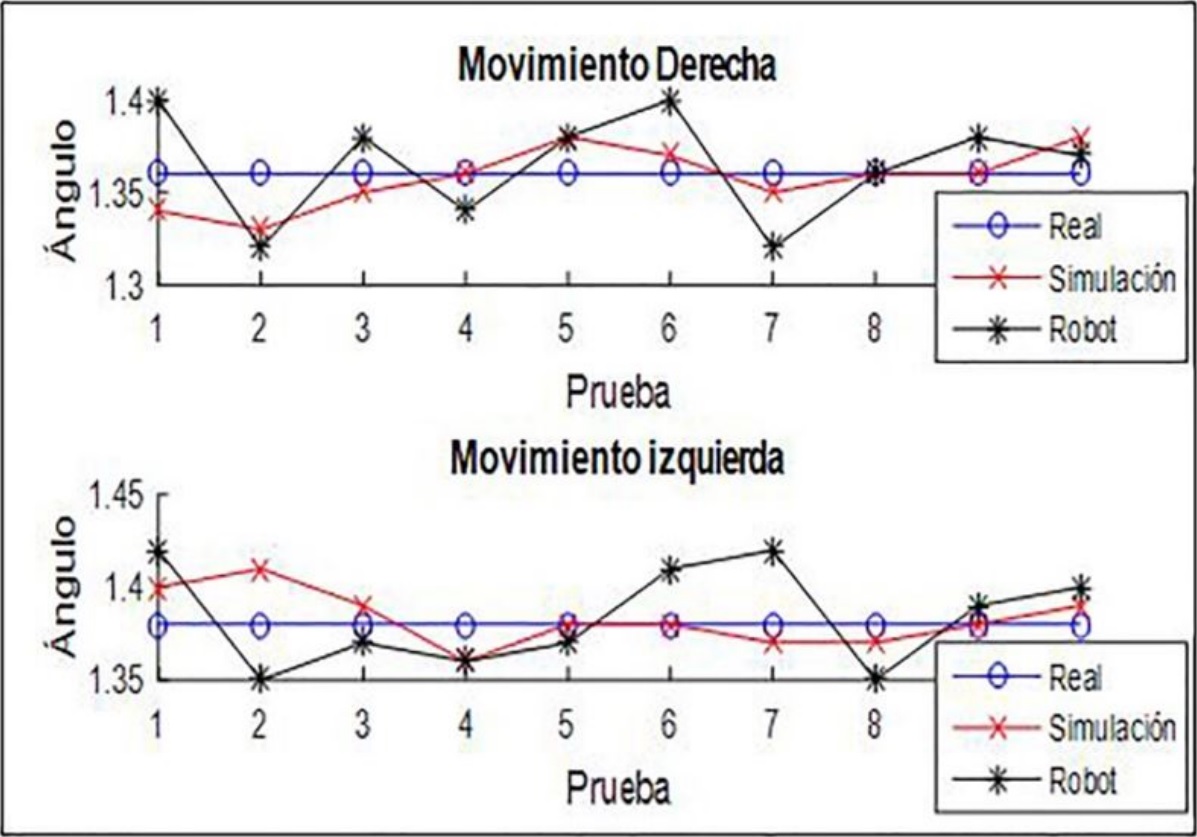
3.3. Comparación de movimientos
Se comparó los ángulos formados por la espina de la salamandra en el movimiento de derecha e izquierda al caminar (Figura 11). Los ángulos se midieron tomando como vértice el centro de la curvatura con un radio constante.
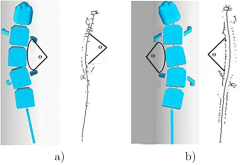
Figura 11 Comparación de movimiento del robot con una salamandra real. (a) Ángulo flexión derecha. (b) Ángulo flexión izquierda.
Se hicieron diez pruebas con la extracción de tres ciclos de movimiento de la salamandra real y se comparó con tres ciclos de movimiento del robot y la simulación (cada ciclo se definió como dos pasos hacia delante de la salamandra ya que se puede apreciar el movimiento de la columna hacia la izquierda y la derecha).
Los datos obtenidos de simulación (S), salamandrareal (R) y del prototipo (P) se muestran en las Tablas 4, 5 y 6.
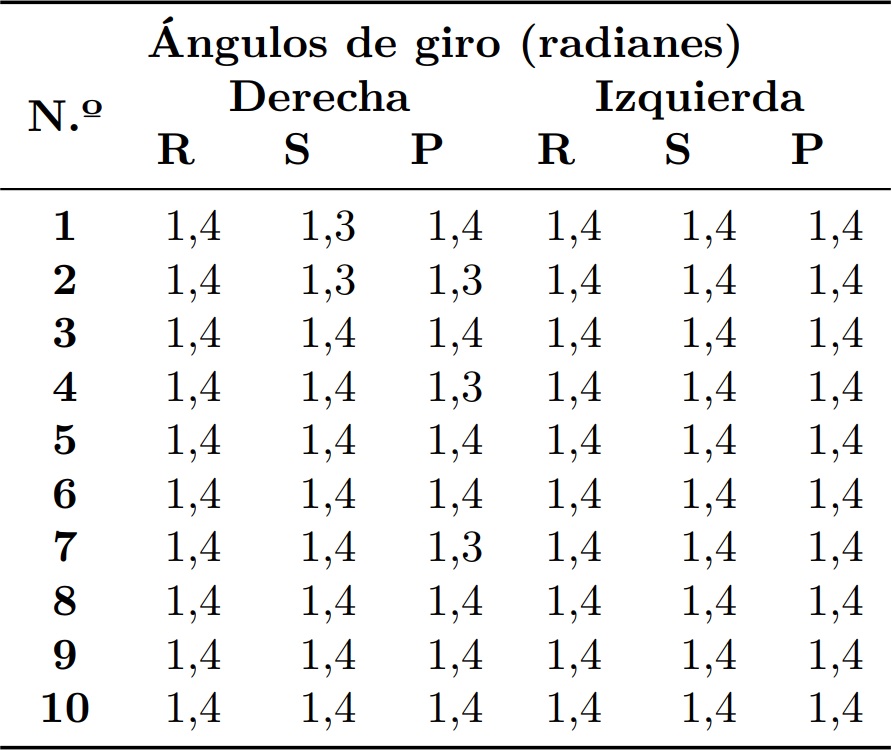
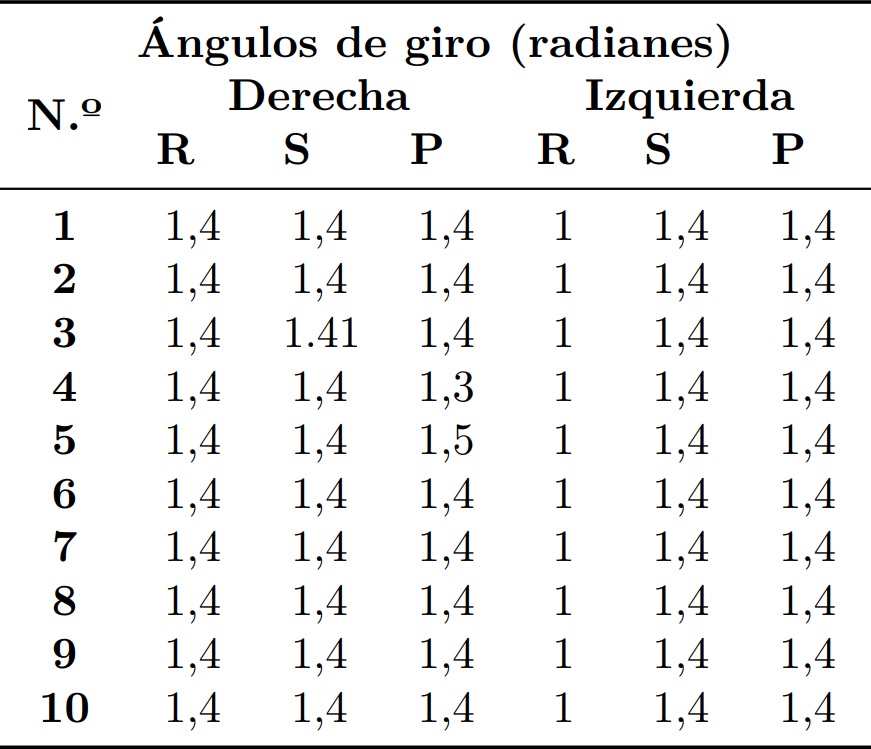
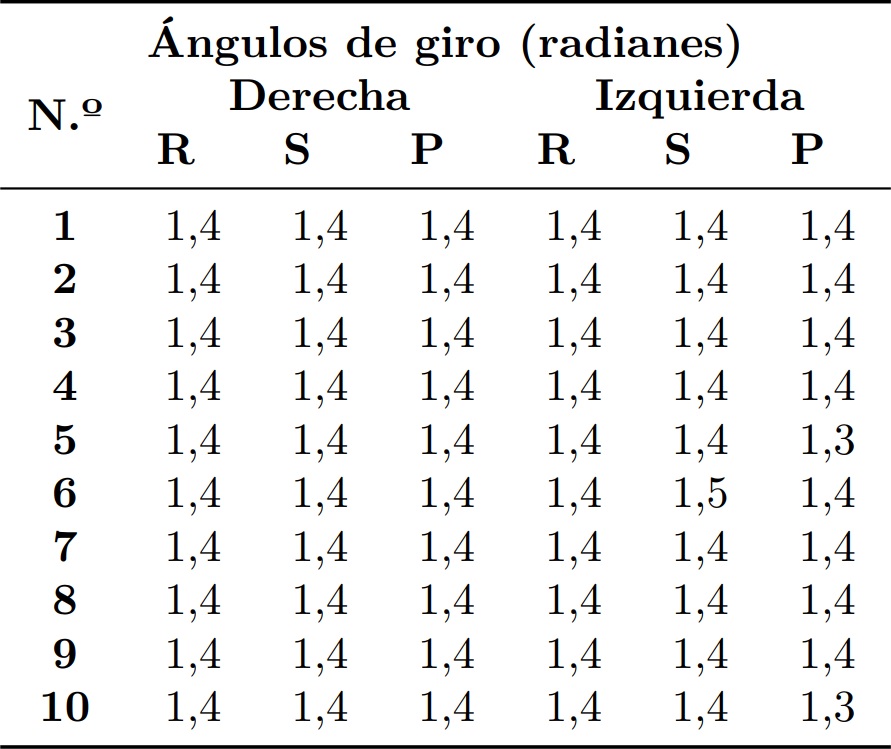
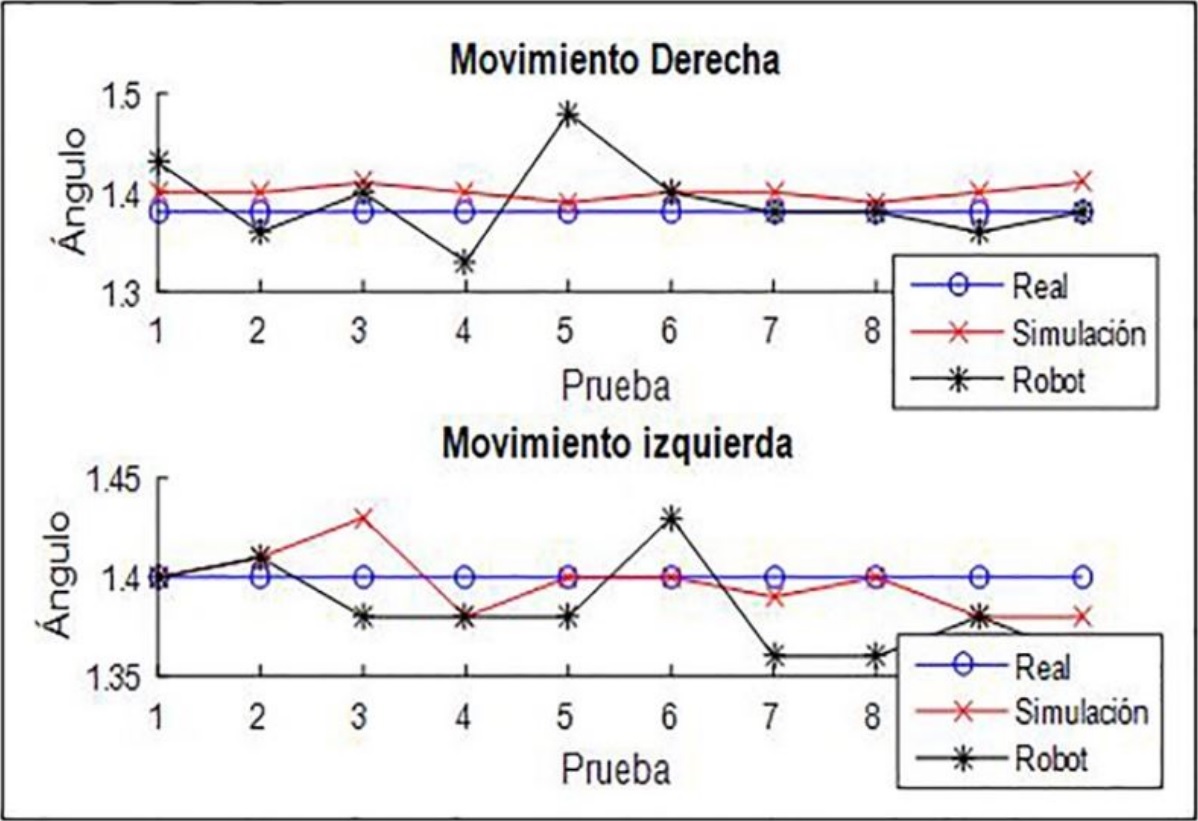
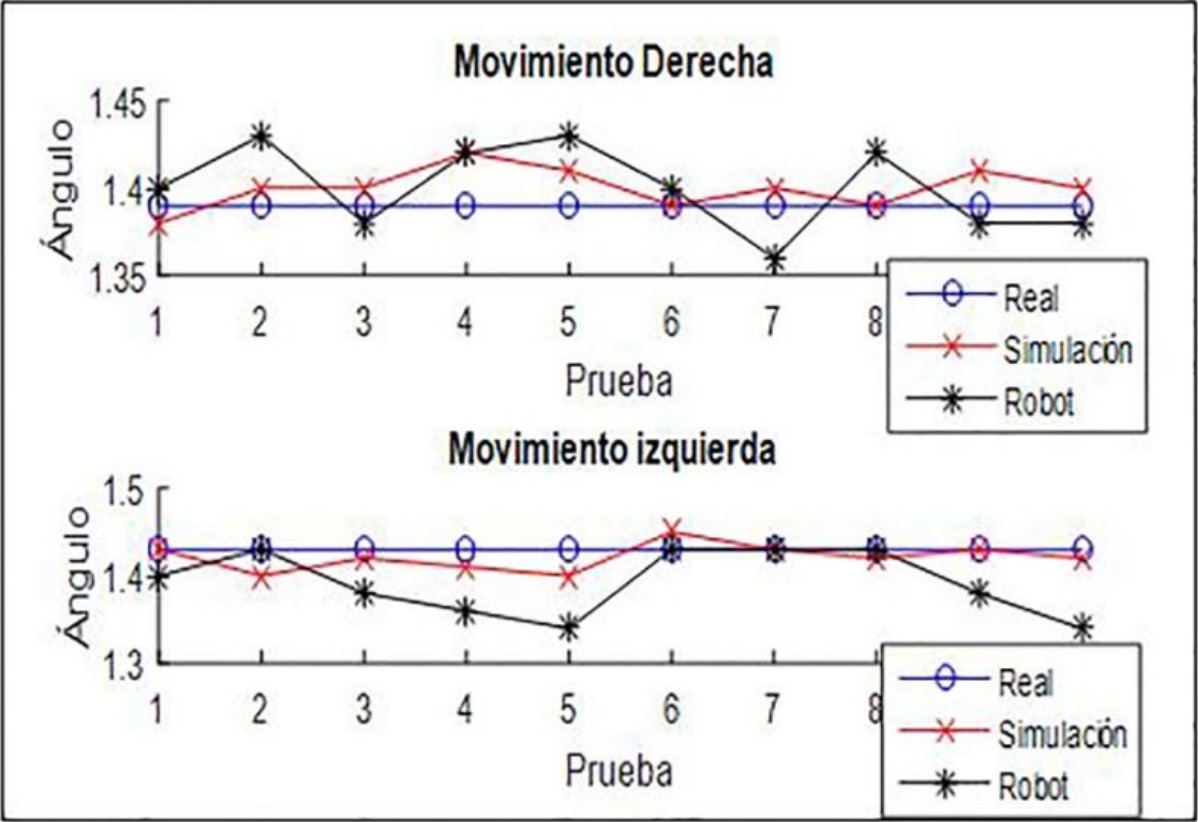
En las Figuras 12, 13 y 14 se puede apreciar la variación en los ángulos para los tres ciclos de movimiento de acuerdo con los datos tabulados anteriormente.
Para determinar la precisión de los ángulos de movimiento se utilizó como métrica de evaluación el error cuadrático medio [24, 25], dado por la ecuación 2:
En la Tabla 7 se muestran los resultados del RMSE obtenido para los diferentes ciclos de movimiento, se tabulan los errores obtenidos de la simulación y del robot con respecto al movimiento real de la salamandra.
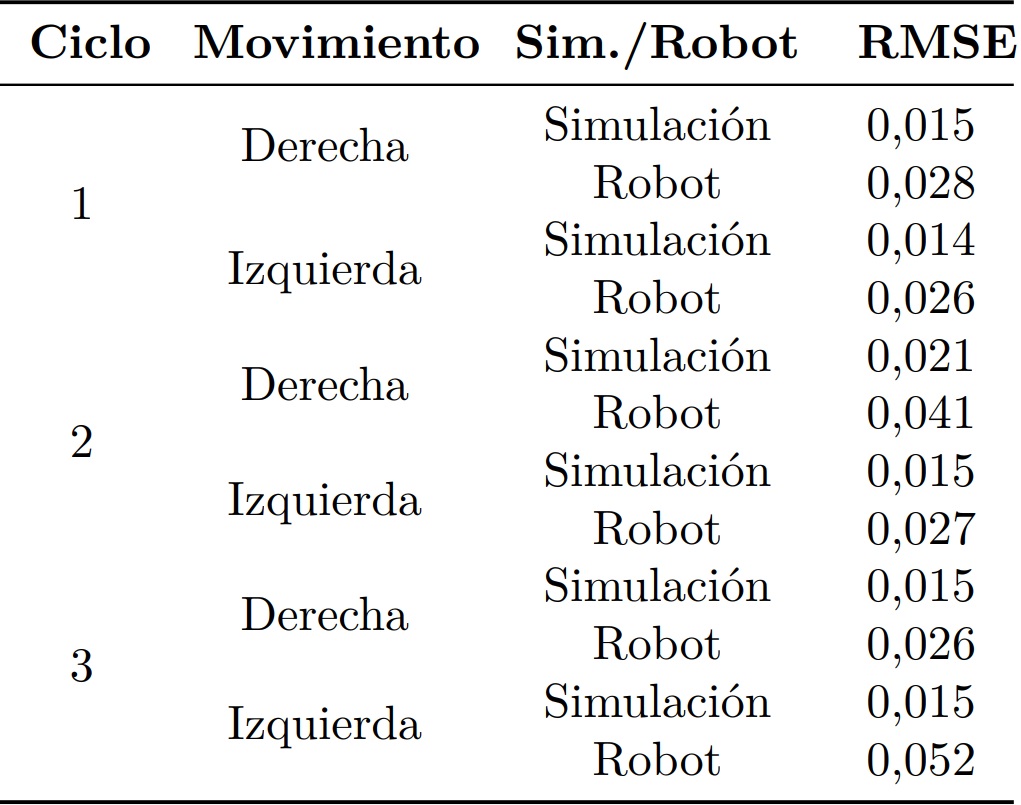
Como se puede observar en la Tabla 7, el error máximo obtenido en la simulación es de 0,021, que representa aproximadamente el 1,5 % de ángulo de error con respecto al movimiento real de la salamandra, mientras que en el caso del prototipo, el error máximo obtenido fue de 0,052, lo cual representa el 3,5 % de error aproximadamente. El error medio obtenido en simulaciones y durante el movimiento del robot puede ser observado en la Tabla 8.
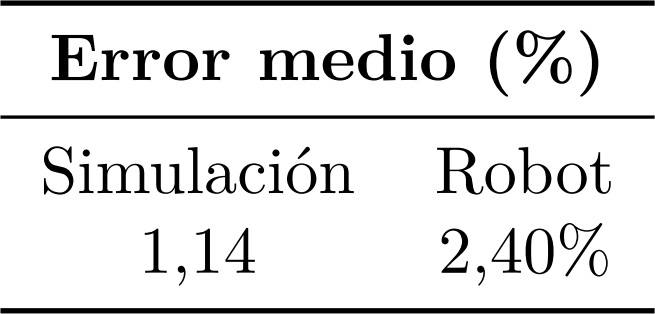
Con base en estos datos podemos decir que la implementación de nuestro diseño imita el movimiento de la salamandra con un error en los ángulos de 2,4 %
4. Conclusiones
La estructura de la salamandra adoptada al robot se traduce en un diseño sencillo para lograr que el prototipo propuesto como robot anfibio, tenga un buen desempeño en agua y en tierra.
El enfoque modular propuesto hace al prototipo versátil por utilizar dos diferentes tipos de elementos: el cuerpo y las extremidades (patas), que facilitan la alimentación de los circuitos y hace que los módulos se adapten para construir distintos tipos de robots.
La transmisión circular-circular entre engranes proporciona un censado de ángulo de movimientos casi lineal al usar un encoder rotativo.
En el prototipo se evidenció la importancia del movimiento de la columna, en la caminata dio un empuje a las patas ayudando en la movilización y en la natación proporcionó velocidad al reproducir el movimiento.
La comparación de movimientos demostró la similitud entre los movimientos al caminar de una salamandra real con el prototipo, siendo la diferencia menor al 5 %.
El bajo presupuesto se tradujo en un diseño simple, con una aceptable funcionalidad; una mayor inversión mejoraría algunos aspectos, debido al conocimiento que ha proporcionado el estudio y el primer prototipo.

