











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO  uBio
uBio 
 Permalink
Permalink
1. Introducción
Hoy en día, la mayoría de las soluciones técnicas desplegadas en el mercado industrial han sido desarrolladas por fabricantes de tecnología privada, lo que causa grandes dificultades enlazar diferentes dispositivos que no son compatibles.
El hardware y el software de última generación en la industria, son importantes tecnologías que impulsan el desarrollo de proyectos en las áreas de supervisión, control e interoperabilidad de las plantas de fabricación, manteniendo precios asequibles para medianas y grandes fábricas [].
En los últimos años se han propuesto varias soluciones para cumplir con los requisitos de supervisión, control y comunicaciones entre procesos de producción utilizando tecnologías de bajo costo.
La automatización basada en PC para industrias consume una gran cantidad de energía, e involucra una gran limitante que se puede superar utilizando la tecnología de un Raspberry Pi (RPi) [ ].
La RPi es un dispositivo que utiliza sistemas operativos Linux, y se compara su nivel de proceso con una computadora personal. Puede aceptar accesorios, por ejemplo, un teclado, mouse, monitor o cámara, y enlazarse al Internet [ ].
La arquitectura del Internet de las cosas (IoT) comprende las últimas tecnologías, como computadoras, dispositivos inteligentes, comunicación inalámbrica y computación en la nube, mediante el uso de la Internet, el sistema se puede controlar y monitorear fácilmente, al utilizar una plataforma IoT, logrando que el sistema se vuelva más versátil, y también es posible el monitoreo de datos en tiempo real.
La RPi enfocada como un dispositivo IoT, se utiliza en muchos artículos de investigación para diferentes aplicaciones industriales.
La automatización se puede realizar a través de tecnologías como Bluetooth, pero está limitada para solamente utilizarse en comunicaciones de corta distancia, por lo tanto, se utiliza en el presente trabajo la tecnología Ethernet mediante el protocolo de comunicación Wifi.
Este proyecto consiste en el diseño de un prototipo de un sistema de automatización industrial, utilizando una RPi como el principal dispositivo de tecnología IoT. Se desarrolla un sistema controlado de forma remota, que puede permitir que la persona que se encuentra lejos del entorno industrial, controle el sistema accediendo a la RPi y obtenga la información deseada.
Se diseña y simula un sistema automatizado de cintas transportadoras que clasifican diferentes tipos de caja según el tamaño, mediante sensores que definen el tipo de caja en base a la combinación lógica programada, que activa las cintas transportadoras según corresponda lo detectado por los sensores, logrando acelerar los procesos. El diseño y simulación se realizan mediante el software CODESYS 3,5V y la plataforma Anyviz, respectivamente.
La interfaz de usuario desarrollada permite controlar y monitorear los procesos industriales, utilizando una pantalla Infilink-HMI y en la plataforma Anyviz en la web.
2. Materiales y Métodos
Para el diseño se utiliza el programa Factory I/0 que permite crear ambientes industriales, en este se utiliza varias cintas trasportadoras, sensores e indicadores, ubicados estratégicamente para la respectiva clasificación de cajas; además, se utiliza el software Infilink-HMI para visualizar el proceso de la clasificación, el estado de los motores y sensores que están funcionando en cada etapa del sistema.
Para la simulación con el programa Factory I/O se utiliza las variables globales definidas en el software KepServerEx, para enlazar los datos con la programación lógica en CODESYS 3,5V, logrando controlar las cintas transportadoras y los mandos de control diseñados en la simulación.
Se usa la RPi4 para controlar de forma remota la simulación y con el programa Infilink-HMI monitorear el sistema, para esto se debe instalar un módulo de CODESYS 3,5V llamado AnyViz, que permite enviar datos por la dirección IP, con un algoritmo definido en la programación de CODESYS 3,5V, logrando enviar los datos y variables a la plataforma Anyviz.IO, de esta forma se crea la interfaz, que se controla remotamente al sistema clasificador de cajas automáticas.
2.1. Desarrollo de Aplicaciones de Automatización en Entorno CODESYS 3,5V
El software utilizado por los controladores industriales CODESYS 3,5V, programado bajo estándar IEC 61131-3 [, ], los cuales son indicados a continuación:
Lista de instrucciones (lenguaje IEC basado en texto).
Texto estructurado (lenguaje IEC basado en texto).
Cuadro de función secuencial.
Diagrama de bloques de funciones.
Tabla de funciones continuas.
Diagrama de escalera.
CODESYS 3,5V es único debido a su cualidad para crear la Unidad de visualización de interfaz. Las herramientas de CODESYS 3.5V web visualización y CODESYS 3,5V web server se utilizan para crear una visualización interactiva.
Los lenguajes de diagrama funcional secuencial y programación estándar, se utilizan al diseñar la aplicación de entrenamiento de los sistemas automatizados en tiempo real del presente proyecto [3, 4].
2.1.1. KepServerEx
KepServerEx es una solución flexible para conectar, controlar y analizar diversos dispositivos de automatización, que permite mejorar optimizar las operaciones y la toma de decisiones en todas las etapas de una organización [5].
Se logra realizar un control avanzado de procesos industriales complicados, mediante el KepServerEx entrelazado con el entorno de red para mejorar la eficiencia del control y monitoreo [5].
OPC Toolbox proporciona una conexión a los servidores OPCDA y OPCHDA, brindándole acceso a datos OPC históricos en tiempo real directamente desde CODESYS 3,5V.
Como primer paso, se agrega el canal en KepServerEx, después de seleccionar el controlador del dispositivo (SIEMENS TCP / IP ETHERNET), aparece la IP de Ethernet.
Como segundo paso, se agrega el modelo y el dispositivo que se conectara, y, además, se define las variables que se utilizarán, por ejemplo, la variable encender con el prefijo del nombre del archivo de CODESYS 3,5V que se llama “Aplicación”, entonces en KepServerEx la definimos como “Aplicación Encender” con valor booleano.
2.1.2. Factory I/O
El software Factory I/O brinda una variedad de escenarios inspirados en adaptaciones industriales representativos para efectuar tareas de control del mundo real. Se puede crear una fábrica virtual utilizando unos archivos de piezas industriales, incluidos sensores, cintas transportadoras, elevadores, indicadores y muchos otros elementos [ ].
Los instrumentos de edición inteligente de las E/S de la fábrica hacen que la creación de una escena 3D sea una práctica agradable y natural.
Factory I/O utiliza protocolos de comunicación industrial, para conectar con el PLC, simuladores de PLC, Modbus y muchas otras tecnologías.
Cada versión incluye un paquete de controladores para una tecnología (es decir, Allen-Bradley Edición, Siemens Edición, OPC, etc.), es compatible con la mayoría de los programas utilizados en las industrias [ ].
2.1.3. Infilink-HMI
El software Infilink-HMI soluciona procesos automatizados industriales, y consta de una interfaz amigable, ideal para controlar y monitorear los procesos, además, está basado en el sistema operativo Windows, tiene funcionalidad de cliente OPC, y puede registrar datos con visualización y gráficos interactivos [ ].
2.1.4. Raspberry Pi 4
RPi4 Modelo B (Pi4B) es la primera de una nueva generación de computadoras RPi que admiten más RAM y con un rendimiento de CPU, GPU y varias E/S, que significativamente permiten la selección de este dispositivo [, , ].
Para verificar la selección del dispositivo servidor que interconecta el software CODESYS 3,5v con la plataforma Anyviz, se procede a comparar los datos técnicos de RPi4 versus Beckhoff CX5010, como se puede ver en la Tabla 1.
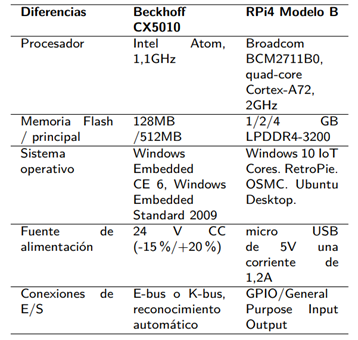
RPi, el dispositivo cuenta con un procesador Broadcom BCM2711B0, quad-core Cortex-A72 de RAM 2GHz, hay poder suficiente para uso lógico, por ejemplo, el Beckhoff CX5010, que es muy utilizado en la industria, tiene un procesador de un solo núcleo a 1,1 GHz y 512 MB de RAM. Una versión integrada de Windows más ligera está disponible como opción para las lógicas de Beckhoff. Es posible que RPi instale diferentes versiones de Linux [11].
2.2. Plataformas Cloud ofrecen Solución basada en IoT
El avance importante en el manejo de datos en los sistemas automatizados como la transmisión entre PLC, IoT Gateway y servidores de almacenamiento, ofrece varios beneficios [].
Las ventajas son:
Respaldo de datos en la plataforma en la nube, tomado consideración la seguridad es mejor usar plataforma de nube comercial.
Proceso de datos en el exterior del PLC, experimentos a tiempo real con el sistema clasificador.
Si el software PLC está correctamente programado, entonces realmente es una solución fácil de usar, que es una herramienta útil para la enseñanza y mostración del procesamiento en aplicaciones industriales.
Se puede agregar una cámara IP para monitorear los procesos.
2.3. Adaptador AnyViz Cloud
Puede transformar sus PLCs existentes en puertas de enlace de IoT y conectar su sistema a AnyViz Cloud.
La innovadora comunicación AnyViz utiliza el protocolo cifrado de los datos a nivel de PLC, y además, está altamente optimizado gracias al método push [].
Las características de la plataforma AnyViz son:
Si la conexión a Internet falla, los datos se almacenan temporalmente en el controlador.
Visualización de datos de procesos en tiempo real con solo unos pocos clics.
Procesar registro y análisis de datos.
Monitoreo de condición.
Control remoto desde cualquier parte del mundo.
Enlaces entre hardware, más allá de las fronteras de ubicación y comunicación.
Acceda desde cualquier navegador moderno, ya sea estación de trabajo, tableta o teléfono inteligente.
CODESYS 3,5V promociona una librería llamada Anyviz Portal que funciona atreves de una dirección IP, definida por el RPi4 para luego administrar el acceso de la interfaz de usuario del sitio web de Anyviz.
Los programas que ofrece en la página oficial de Codesys suelen tener buena documentación, por lo que se decidió probar el servidor Anyviz se comercializa a sí mismo con un adaptador de comunicación gratuito y fácil de usar y entorno de programación gráfico. Se puede encontrar un adaptador en el programa PLC para el servidor web como bloque de programa descargable directamente para lógicas basadas en CODESYS, con sistemas operativos como Windows y Linux, basados en ARM y adaptadores directamente al OPC UA y Para el protocolo MQTT [].
La HMI real, o interfaz de usuario, es un entorno de programación gráfica basado en HMTL5 basado en arrastrar y soltar. Por lo tanto, el servicio funciona en un navegador de Internet, en un sitio web. Su propia cuenta de usuario está registrada en el portal y se ingresan las mismas identificaciones Bloque de programa de PLC. De esta forma, el PLC abre una conexión directa al portal y actualiza las deseadas variables para el servicio.
2.4. Elementos industriales para la automatización
2.4.1. Definiciones para la DFT
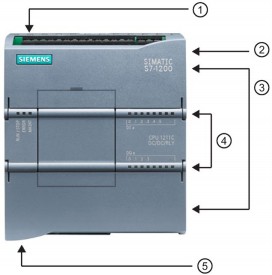
El controlador S7-1200 incorpora la flexibilidad y la potencia para controlar una amplia variedad de dispositivos en apoyo de las necesidades del sistema automatizado. Al descargar el programa, la CPU contiene la lógica requerida para monitorear y controlar los dispositivos en su aplicación.
La CPU monitorea las entradas y cambia las salidas de acuerdo con la lógica de su programa, por ejemplo, conteo, sincronización, operaciones matemáticas complejas e interconexión con otros dispositivos inteligentes. La CPU proporciona un puerto PROFINET para la comunicación a través de una tarjeta de red PROFINET, además, hay módulos adicionales disponibles para comunicarse a través de PROFIBUS, GPRS, RS485 o RS232 [].
Las características físicas del PLC SIEMENS S7-1200 Figura 1.
Conector de Corriente.
Ranura para Memory Card.
Conectores extraíbles para el cableado de usuario.
Leds de estado para las Entradas y Salidas integradas.
Conector PROFINET.
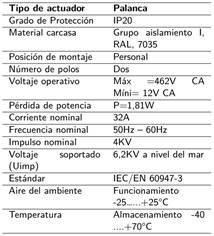
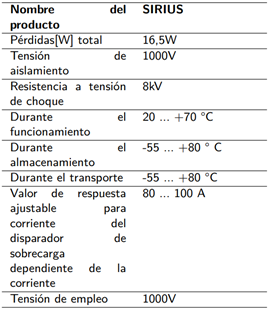
2.4.2. Interruptor Seleccionador
El interruptor es un aparato mecánico de conexión que ofrece tolerar e interrumpir corrientes en los circuitos, y en casos que exista sobrecargas durante el servicio, este aparato permite tolerar durante un tiempo determinado corrientes dentro del circuito, pero al final induce a un cortocircuito para proteger el sistema . En la Tabla 2 se indican los datos técnicos del interruptor seleccionador.
2.4.3. Contactor de Potencia
El contactor de potencia tiene como objetivo de establecer el paso de la corriente, ya sea que se lo esté usando para un circuito de potencia, es decir, tiene la capacidad de cortar la corriente eléctrica en una instalación, además, que es posible accionar a distancia [16].
Tiene dos opciones de funcionamiento:
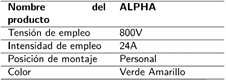
2.4.4. Bornero Siemens
Borne de tornillo, en ambos lados tiene un borne sencillo, verde amarillo, 6mm, 2,5. En la Tabla 3 se indican los datos técnicos del Bornero.
2.4.5. Relé Térmico de Sobrecarga
Están concebidos para la protección de amperaje de cargas con arranque normal y contra calentamiento inadmisible a consecuencia de sobrecarga y desbalance de fase []. En la Tabla 4 se indican los datos técnicos del relé térmico.
2.4.6. Motores de Inducción de Bajo Voltaje IEC 400v 50Hz
Son motores de rendimiento de procesos, el motor de rendimiento está diseñado para satisfacer las aplicaciones más exigentes que se encuentran en las industrias [14].
Las propiedades de los motores de inducción de bajo voltaje IEC 400v 50Hz son:
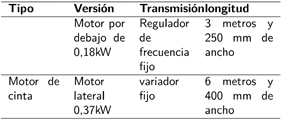
2.4.7. Cintas de Motor
Es una cinta transportadora que se relaciona con un motor, que puede activarse directamente o con un variador de frecuencia, que puede ser mecánico o un regulador de velocidad. Estas cintas transportadoras pueden variar según el largo, ancho, alto y el tipo de motor según la versión elegida, con un interruptor primario, o un interruptor de caja con variador de frecuencia e interruptor primario [17]. En la Tabla 5 se indican los datos técnicos de las cintas transportadoras.
2.4.8. Sensor Detector de Posición Óptico
Los detectores de posición ópticos tienen un emisor y un receptor, que se encuentra en un mismo sensor, el emisor envía por secuencia los rayos de luz roja visible, el objeto detectado refleja dicha luz []. En la Tabla 6 se indican los datos técnicos del sensor detector.
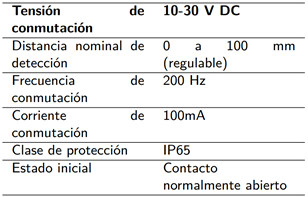
El sensor del receptor detecta esta luz reflejada, provocando un cambio del estado de conmutación. Además, tiene una salida PNP, es decir que la línea que recibe la señal conmuta a positivo, obteniendo como resultado un estado abierto [].
Un diodo de luz amarillo indica el estado del sensor y el receptor tiene polos inconfundibles y es fuerte a sobrecargas y cortocircuitos.
2.4.9. Sensor de Proximidad Fotoeléctrico
Sensor de proximidad fotoeléctrico de la marca S5N se basan en detectan el objeto cuando el rayo de luz se atenúa por la interferencia del objeto []. Se utilizan para la detección de piezas en los sectores industriales como el textil, ensamble y de la construcción en general, además, se encuentran en los campos de la manipulación de materiales y el transporte automatizado.
Estos sensores tienen importantes ventajas:
Detección de todo tipo de formas, incluyendo materiales sólidos y transparentes.
Se encuentran entre los de mejores en eficiencia en términos de una distancia.
En la Tabla 7 se indican los datos técnicos del sensor fotoeléctrico.
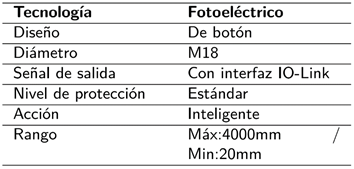
Su flexibilidad de producción, inmunidad a las interferencias magnéticas, eléctricas y ópticas, así como una mejor estabilidad. Los sensores S5N, con carcasa tubular plana estándar, continúan ofreciendo el rango más amplio de detección, con una completa selección de funciones ópticas axiales o radiales, conector de cable o M12, NPN o PNP con salidas [ ].
Con su nueva y única tecnología ASIC harán del modelo M18 la primera familia de sensores tubulares con IO-Link y sensor inteligente con perfiles que permite seleccionar objetos base a combinaciones de sensores y determinar qué acción tomar el sistema cuando detecta el objeto, optimizando las clasificación y detección.
3. Discusión y Resultados
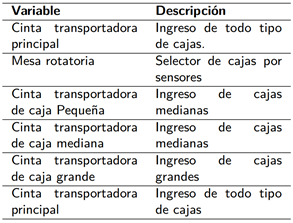
En el software Factory I/O una vez construido el escenario, se procede a definir en descripciones de todos los instrumentos y elementos para realizar el enlace de variables con CODESYS 3,5V.
Las variables del sistema de las cintas transportadoras y de los sensores están descriptas en la Tabla 8 y 9.
El sistema inicia cuando se presiona el botón encender, que puede ser ejecutado por el HMI diseñado en el software Infilink-HMI o en la plataforma AnyViz Cloud desde la interfaz del administrador o del usuario.
La ventaja de usar AnyViz es que en el CODESYS 3,5V se puede instalar una librería del servidor de AnyViz, y mediante la dirección IP del RPi4, permite enviar los datos en tiempo real, al servidor con un código de verificación en la nube y compartir a más usuarios.
3.1. Diseño del Circuito de Potencia en SolidWorks Electrical
En la figura 2, en el diseño del circuito de potencia realizado con software SolidWorks Electrical, la ventaja de usar este software es que cada elemento utiliza librerías de diferentes marcas y modelos de las industrias, mostrando la información y características técnicas, por ejemplo, el motor trifásico de la marca SIEMENS muestra la información de potencia, torque, tipo de conexión, factor de potencia, etc. que puede ser ejecutado por el HMI diseñado en el software Infilink-HMI o en la plataforma AnyViz Cloud desde la interfaz del administrador o del usuario
Se prueba con diferentes dispositivos (celular, laptop, computadora de escritorio, etc.) con acceso a internet mediante diferentes cuentas del servidor AnyViz, se observa que todos estos pueden controlar y visualizar remotamente los procesos que tiene el sistema mediante los indicadores definidos en el software CODESYS 3,5V.
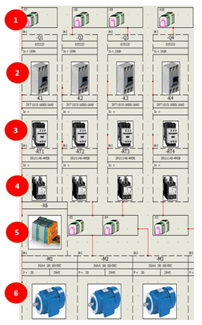
El diseño de potencia de las cintas transportadoras está compuesto de varias partes como son:
1. Borneras de la marca siemens para la entrada principal.
2.bInterruptor Seccionador, vital importancia -Q1.
3. Contacto de potencia -K1.
4. Relé térmico -RT1.
5. Variador de frecuencia (es opcional dependiendo del sistema).
6. Borneras secundarias y motor trifásico de -M1.
Cada elemento del circuito de potencia está utilizando librerías de la marca SIEMENS y ABB.
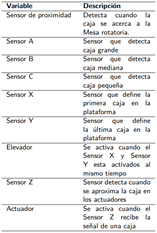
3.2 Diseño del Circuito de Control en SolidWorks Electrical
En laFigura 3, se puede observar los botones de paro, emergencia, inicio, en la línea de control con el PLC siemens s7-1200 con una fuente de alimentación de 24V y 448mA, para activar los relés internos y la CPU, los sensores que definen el tipo de caja están conectados al final de la cinta principal donde se activan según el tipo de configuración.
En laFigura 3, se tiene el circuito de control del sistema clasificadora de cajas automáticas:
1. Contactó, botón de inicio verde, botón de emergencia amarillo.
2. Botón de stop, contactó.
3. Foco indicador de sensor verde.
4. Sensor Tx y Rx.
5. Foco indicador de cintas transportadoras activadas.
6. Foco verde de sistema activado y foco rojo de sistema desactivado.
7. PLC S7-1200 Siemens.
8. Batería de 24v y 448mA.
9. Gabinete Siemens metálico.
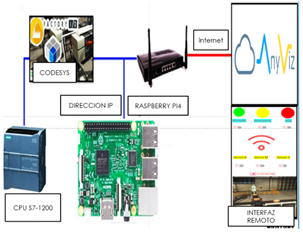
3.3. Diagrama de Comunicación IoT
Se diseña el diagrama de comunicación remota utilizando la RPi4 como servidor para conectar el PLC virtual programado en el CODESYS 3,5V con la plataforma AnyViz y Factory I/O, véase en la Figura 4.
La interfaz indicada en la Figura 5 se puede observar los tres botones de control que son: encender, stop, emergencia; e indicadores adicionales de los sensores, motores y actuadores con sus respectivas etiquetas, en el cual se puede manipular directamente desde CODESYS 3,5V y Factory I/O, mediante el software KepserverEx se definen las variables de la Tabla 9 que permiten la comunicación.

La interfaz diseñada en la Figura 6 para una pantalla HMI, se puede activar cada cinta transportadora y controlar el sistema, como se indica en la Tabla 8.

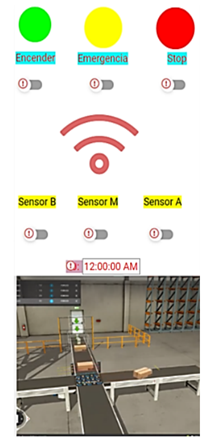
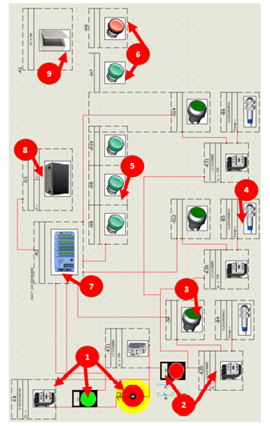
En el servidor AnyViz de la Figura 7 se agrega seis botones principales para que los usuarios con autorización puedan monitorear remotamente el sistema clasificador de cajas, desde sus dispositivos con acceso a internet, el administrador puede configurar quiénes pueden manipular el sistema y quiénes solo pueden estar de observadores, el número de usuarios puede ser más de cien cuentas que compartan el control del sistema.
4. Conclusiones
El sistema se probó de forma remota por AnyViz, que permite administrar el acceso de diferentes usuarios, que pueden controlar y monitorear la simulación de Factory I/O y la interfaz creada del software Infilink-HMI, diseñado para el control de cajas en tiempo real.
Cada paso del sistema automatizado, se comprobó que es viable y eficiente para los procesos industriales controlados por el PLC, aplicando IoT y diferentes softwares, para desarrollar una comunicación y monitoreo de cada instrumento y elemento, usando el dispositivo RPi4 y el software CODESYS 3,5V, que permite controlar los módulos en la programación lógica.
Una de las ventajas del AnyViz que se encontró, es que se puede interconectar con diferentes dispositivos incluyendo el PLC S7-1200 Siemens, además, se pudo programar mediante máquinas virtuales del PLC, simulando un sistema industrial real, lo cual resulto en una forma interactiva, que permite conectar con otros programas, de esta forma el usuario puede controlar el sistema con cualquier dispositivo que tenga acceso a internet.
Se realizó un análisis esquemático utilizando SolidWorks Electrical en los circuitos de potencia y de control, tomando los datos técnicos de cada elemento, como la potencia requerida de cada cinta transportadora, la velocidad de los variadores de frecuencia, los sistemas de seguridad como los relés térmicos, indicadores de estado de cada sensor y motor.
Recomendaciones
Se debe considerar la instalar solo versión de CODESYS 3,5 v en su sistema operativo ya que algunas versiones no tienen los módulos de comunicación para controlar remotamente con servidores IoT, además debe utilizarse KepserverEx en el caso que se realice una simulación con Factory I/O y otro tipo de software para visualizar los procesos, tomar en cuenta los elementos que se utilizarán para realizar los esquemas eléctricos y de control con el programa SolidWorks u otro similar con sus respectivas librerías.

