











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. INTRODUCCIÓN
En la industria en general y en la automotriz continuamente se realizan investigaciones que tienen como objeto la mejora en el desempeño de los sistemas. La inclusión de sistemas de gestión electrónica en vehículos ha contribuido a elevar la eficacia y la eficiencia de los sistemas en los que estos se implementan. Las mejoras conseguidas están estrechamente ligadas a las configuraciones y calibraciones de los sistemas (Pulkrabek, 2004) que son realizadas en laboratorios especializados que consideran al nivel del mar como referencia y el uso de combustibles disponibles en las regiones en donde se realizan las calibraciones antes mencionadas. La importancia del estudio planteado es la pérdida que causa al proceso de combustión el operar de la manera actual como se muestra en (Castaño & Patiño, 2003), para nuestro caso el hecho que los motores de combustión interna operen bajo condiciones no óptimas en ciudades que sobrepasan los 2000 msnm ocasiona pérdidas económicas y ambientales producidas por el mayor consumo de combustible, la menor generación de potencia y la mayor concentración de contaminantes en los gases de escape (Calza & Ángel, 2011), de allí la necesidad de encontrar un punto de funcionamiento especial diferente al determinado por el fabricante para mejorar el desempeño del motor en las condiciones antes señaladas.
2. MARCO TEÓRICO
El motor de combustión interna alternativo de encendido provocado, es el encargado de transformar la energía termoquímica del combustible (gasolina) en energía mecánica, misma que posteriormente será utilizada para producir el desplazamiento del automóvil. La característica fundamental de este motor es que el inicio de la combustión se produce un aporte de energía externo al ciclo termodinámico, al hacer saltar una chispa en los electrodos de la bujía, debiendo producirse en el momento adecuado para conseguir que el proceso de combustión sea lo más eficiente posible. Entre las principales variables del motor se encuentran las siguientes: el factor Lambda, el Adelanto al encendido, el Régimen de Giro, la Carga y el Combustible. La altitud a la que trabajan los motores de combustión interna, tiene una influencia directa sobre su funcionamiento, debido a la perdida de potencia por la disminución de la densidad del aire a mayores altitudes.
3. MÉTODOS Y PROCEDIMIENTOS
Entre las estrategias más utilizadas en optimización y mejora continua se encuentra el diseño de experimentos mediante el Ciclo de Deming (Montgomery, 2012), que constituye una estrategia para conseguir mejoras continuas tanto en procesos como en productos, aplicando las etapas:
1. Diseño del plan experimental
2. Realización de las corridas experimentales.
3. Análisis de resultados.
4. Implementación de los resultados.
Se parte de la hipótesis de que un motor de combustión interna ciclo Otto puede trabajar de mejor manera que la prestablecida por el fabricante bajo las condiciones atmosféricas generadas en la ciudad de Cuenca.
3.1 Unidad Experimental
La unidad experimental utilizada para la realización de las pruebas es un vehículo pick up cuyas características se muestran en la Tabla 1.
Tabla 1. Características del vehículo de experimentación
| Tipo | Pick up |
|---|---|
| Motor | 2.7 i |
| Potencia Máxima | 152 HP @ 4800 RPM |
| Torque | 240 Nm @4000 RPM |
| Cilindrada | 2694 cm3 |
| Número de cilindros | 4 |
| Relación de Compresión | 9.5 |
| Sistema de combustible | MPFI Secuencial |
| Distribución | DOHC VVTI |
| Válvulas por cilindro | 4 |
Como se muestra en la Figura 1, para el desarrollo del experimento se hizo uso del banco dinamométrico MAHA LPS 3000 que consta de un freno dinamométrico de corrientes parásitas que permite generar carga a más de medir la fuerza tractora y la potencia simultáneamente, la potencia se determina según (ISO, 2010).

Para el análisis de la concentración de emisiones contaminantes en los gases de escape y el consumo de combustible se usa el analizador de gases MGT 5 y el contador AIC fuel respectivamente, cuya incertidumbre de medición es del 0.6% según datos del fabricante. Las características se muestran en la Tabla 2.
Tabla 2. Características del banco dinamométrico
| Característica | Rango | Sensibilidad | Unidad |
|---|---|---|---|
| Potencia | 0 – 520 | 0.1 | Kw |
| Fuerza Tractora | 0 - 12000 | 1 | N |
| Monóxido de Carbono | 0 – 10 | 0.01 | % |
| Dióxido de Carbono | 0 – 16 | 0.1 | % |
| Oxígeno | 0 – 21 | 0.01 | % |
| Hidrocarburos no combustionados | 0 – 5000 | 1 | Ppm |
| Óxidos Nitrosos | 0 – 5000 | 1 | Ppm |
| Lambda | 0 -2 | 0.001 | - |
| Consumo de combustible | 0 – 120 | 0.01 | l/h |
3.2 Diseño Experimental
Se plantea un diseño experimental factorial de dos niveles con el objetivo de hallar la relación entre los factores de estudio y las variables de salida. Para la optimización se utiliza un diseño experimental de Superficie de respuesta Box Behnken cuyo objeto principal es encontrar un punto de operación del motor diferente del impuesto por el fabricante en el cual el comportamiento de una o más variables de respuesta sea mejor que el actual, dadas las condiciones especiales de la ciudad de Cuenca. De acuerdo a (Abu-Nada, Al-Hinti, Akash, & Al-Sarkhi, 2007) las variables más significativas dentro del funcionamiento del motor ciclo Otto son las que se describen a continuación.
3.2.1 Variables de respuesta
Las variables de respuesta son salidas del sistema cuyo valor se desea mejorar, fueron escogidas acorde a investigaciones sobre el tema y normativa local como se ve en (Kyriakides, Dimas, Lymperopoulou, Karonis, & Lois, 2013), (INEN, Gestión Ambiental. Aire. Vehículos Automotores. Determinación de la Concentración de Emisiones de Escape en Condiciones de Marcha Mínima o Ralentí Prueba Estática, 2000), (INEN, Revisión Técnica Vehicular. Procedimientos, 2003), (Corporación para el mejoramiento del aire de Cuenca, 2006) y se muestran en la Tabla 3.
3.2.2 Factores de Inferencia
Los factores de inferencia son aquellos que producen cambios en las variables de salida, pueden ser controlados, de ruido o de estudio. Los factores controlables se pueden fijar en un punto o en un nivel de operación, su influencia en las variables de salida no se desea evaluar. Los factores de ruido son difíciles de controlar, pueden modificar el comportamiento de las variables de respuesta y su influencia se busca eliminar. Los factores de estudio son aquellos de los cuales se busca medir su influencia en las variables de respuesta del motor, los factores de inferencia se muestran en la Tabla 4.
Tabla 4. Factores de inferencia
| Factores | Símbolo | Unidad | |
|---|---|---|---|
| Controlables | Temperatura del refrigerante | T ref | [ ° C ] |
| Temperatura de la rodadura | T rod | [ ° C ] | |
| Temperatura del lubricante | T lub | [ ° C ] | |
| Apertura EGR | EGR | % | |
| Accionamiento VVTi | VVTi | % | |
| Ruido | Temperatura del Aire | T aire | [ ° C ] |
| Temperatura del combustible | T comb | [ ° C ] | |
| Presión Atmosférica | P atm | [ Pa ] | |
| Humedad relativa del aire | H rel | [ % ] | |
| Estudio | Régimen de giro | ɳ | [ rpm ] |
| Carga | Ƈ | [ % ] | |
| Lambda | Λ | - | |
| Adelanto al encendido | α | [ ° ] | |
| Octanaje del combustible | R | [ RON ] | |
3.3 Corridas Preliminares
Para poder determinar el efecto de cada factor sobre las salidas del sistema son necesarios dos niveles, el objeto de incluir un nivel intermedio es para determinar si el comportamiento de la salida dentro del dominio de análisis es lineal o presenta curvatura. Para determinar los niveles de los factores se recurre a corridas preliminares en las que se varía un solo factor a la vez con el fin de establecer el rango de operación de cada factor.
3.3.1 Régimen de Giro
La velocidad de giro del motor es un factor importante tanto para las prestaciones como las emisiones contaminantes. Los niveles de este factor se basan en (INEN, Gestión Ambiental. Aire. Vehículos Automotores. Determinación de la Concentración de Emisiones de Escape en Condiciones de Marcha Mínima o Ralentí Prueba Estática, 2000), (INEN, Revisión Técnica Vehicular. Procedimientos, 2003) y (Corporación para el mejoramiento del aire de Cuenca, 2006), en las que el régimen de giro de ralentí se establece como el regulado por el motor con un límite máximo de 1100 rpm; para el caso de nuestra unidad experimental este régimen de giro a temperatura normal de funcionamiento se establece en 700 rpm. El segundo régimen de giro está normado en 2500 rpm, por lo que el nivel medio es 1600 rpm.
3.3.2 Carga
Los niveles de carga externa del motor se basan en el principio de funcionamiento del mismo y en la normativa ya citada. El nivel mínimo corresponde a la ausencia de carga externa es decir 0%, el nivel máximo corresponde al 100% de carga externa que es el máximo torque opositor que el motor puede soportar sin disminuir su velocidad de giro con el acelerador accionado totalmente y el nivel intermedio que corresponde al 50% de carga externa es el máximo torque opositor que el motor puede generar sin disminuir su velocidad de giro con el acelerador accionado en diferentes posiciones hasta conseguir que la presión en el colector de admisión sea la media entre la mínima (345 mBar) y máxima carga (735 mBar) es decir 540 mBar.
3.3.3 Lambda
Si bien se puede incrementar las prestaciones del motor a través de la modificación de la relación aire combustible no se debe descuidar el incremento que esto ocasiona en las emisiones contaminantes. Los valores de emisión de monóxido de carbono y de hidrocarburos no combustionados están limitados por (INEN, Gestión Ambiental Aire Vehículos automotores límites permitidos de emisiones producidas por fuentes móviles terrestres de gasolina, 2002). Para la corrida preliminar se sustituye el sensor de oxígeno del vehículo por un sensor de banda ancha y mediante un lazo de control se altera la relación aire combustible con el fin de obtener los valores de las emisiones en ralentí que se muestran en la Figura 2.

Los valores de λ mostrados en la Tabla 5 son limitados por el 60% de lo que se señala en (INEN, Gestión Ambiental Aire Vehículos automotores límites permitidos de emisiones producidas por fuentes móviles terrestres de gasolina, 2002), con el fin de evitar que por efecto de otros factores se superen dichos límites.
Tabla 5. Valores límites de emisión
| Variable | Límite Normado | Límite Admisible | Intervalo |
|---|---|---|---|
| CO | 1% | 0.6 % | 0.975 < λ |
| HC | 200 ppm | 120 ppm | 0.926 < λ < 1.05 |
El límite superior de λ es 1.05, el valor original al que funciona el motor es 1, por lo que por simetría el nivel inferior se establece en 0.95.
3.3.4 Adelanto al Encendido
La variación del adelanto al encendido puede incrementar o disminuir las prestaciones del motor al igual que las emisiones contaminantes. Los valores de adelanto para los niveles de carga y régimen de giro se muestran en la Tabla 6.
Tabla 6. Valores de adelanto al encendido
| Régimen [ rpm ] | Carga [ % ] | Adelanto [ ° ] |
|---|---|---|
| 700 | 0 | 10 |
| 2500 | 0 | 32 |
| 700 | 100 | 9 |
| 2500 | 100 | 24 |
El excesivo adelanto puede generar autoencendido y desembocar en el incremento de emisión de óxidos nitrosos, en cambio un punto de encendido retrasado genera pérdida de potencia y excesivo consumo de combustible. La detonación producida a causa de la modificación del adelanto al encendido se cuantifica basada en (Patente nº US8639432 B2, 2014), para lo cual es necesario extraer características de las señales de vibración adquiridas en las mismas condiciones de funcionamiento con 6 diferentes adelantos al encendido que parten desde el punto determinado por fabricante con incrementos de 2.5° hasta 12.5°. Para tal efecto se dispone de un acelerómetro que se ubica según (Rivera & Chica, 2015) que aplica a motores reciprocantes con potencias superiores a 100Kw. De las señales de aceleración adquiridas [m/s2] se extraen características estadísticas temporales como la energía ( E ), potencia ( P ), RMS, factor de cresta ( FC ) y curtosis ( C ). Con el fin de evaluar el efecto de la detonación en un solo factor, se ha generado el índice normalizado IN que se forma de la media de los efectos individuales de cada factor respecto del valor del motor original. El índice normalizado se calcula con la Ecuación (1) que se muestra a continuación:
El valor de IN para el motor original es 0 y mientras menor sea la detonación el valor del índice se mantendrá bajo como se señala en la Tabla 7.
Tabla 7. Índice Normalizado
| ɳ [rpm ] | ƈ [ % ] | Incremento [ ° ] | α [ ° ] | IN |
|---|---|---|---|---|
| 2500 | 100 | 0 | 24 | 0 |
| 2500 | 100 | 2.5 | 26.5 | 0,52 |
| 2500 | 100 | 5 | 29 | 0,57 |
| 2500 | 100 | 7.5 | 31.5 | 0,66 |
| 2500 | 100 | 10 | 34 | 0,88 |
| 2500 | 100 | 12.5 | 36.5 | 1,89 |
En la Figura 3. Se puede observar que acorde al incremento al adelanto al encendido el valor del índice se incrementa abruptamente a partir del valor de 7.5°, por lo cual adelantos generaran una fuerte detonación.
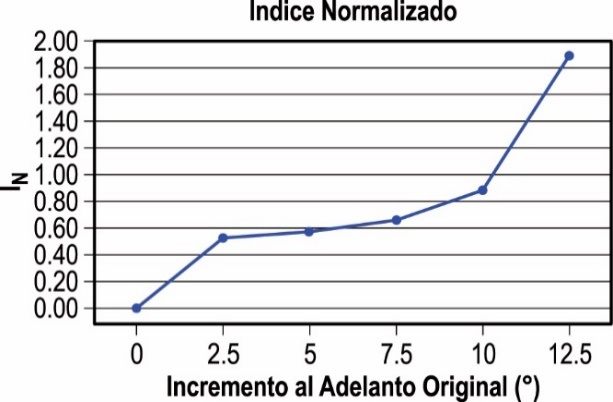
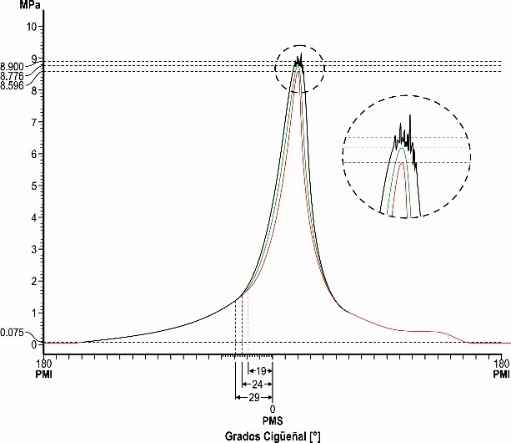
El valor límite de incremento al adelanto al encendido es 7.5°, sin embargo a lo largo de la experimentación se llevan a cabo tratamientos con mezclas pobres y ricas que incrementan la posibilidad de generar detonación, por lo que se establece el nivel de incremento al adelanto al encendido en 5°, a partir de ello el valor del nivel medio es 0°, es decir el valor original del motor y por simetría el nivel mínimo es -5°. Para muestra de lo establecido se dispone de un sensor de presión en la bujía del cilindro número 1 para adquirir el comportamiento de la presión al interior del cilindro. La Figura 4 y la Tabla 8 describen que para los niveles de adelanto de 19° y 24° no se generan oscilaciones en el interior del cilindro que si se producen para el adelanto de 29°, el incremento de la amplitud de estas oscilaciones se ve reflejado en el valor del índice normalizado.
3.3.5 Combustible
En la ciudad de Cuenca se dispone de las gasolinas extra y súper. Los niveles del factor combustible se determinan experimentalmente a través del número de octanos de investigación RON, para lo cual se miden mezclas de concentraciones de gasolina súper en extra. La gasolina extra tiene un RON medio de 81.9 la súper de 91.3, el punto medio de octanaje de 86.6 se consigue con una concentración de 23% de gasolina súper y 77% gasolina extra.
3.4 Tratamientos
Una vez seleccionados los niveles de cada uno de los factores que se muestran en la Tabla 9 se procede a determinar los tratamientos de la corrida experimental.
Tabla 9. Niveles factoriales
| FACTOR | MÍNIMO | CENTRAL | MÁXIMO |
|---|---|---|---|
| ( - ) | 0 | ( + ) | |
| ɳ [ rpm ] | 700 | 1600 | 2500 |
| ƈ [ % ] | 0 | 50 | 100 |
| λ | 0.95 | 1 | 1.05 |
| α [ ° ] | -5 | 0 | 5 |
| R [ RON ] | 81.9 | 86.6 | 91.3 |
Para el diseño experimental factorial de cinco factores y dos niveles tenemos 32 tratamientos en una repetición; cada tratamiento es una combinación única de los 5 factores en total se realizaron tres repeticiones lo que genera 96 tratamientos que incluyendo los 45 tratamientos con puntos centrales de la superficie de respuesta generan un total de 141 corridas experimentales.
3.4.1 Aleatorización de las pruebas
La aleatorización de las pruebas se aplica como herramienta para eliminar efectos indeseables provocados por los factores ambientales que son de difícil control. El principio de aleatorización hace que el posible efecto de los factores de ruido se reparta “equitativamente” en todos los tratamientos, incrementa la posibilidad de que los errores de muestreo sean independientes lo cual es requisito para la validez de las pruebas estadísticas, también es una técnica para asegurar que los pequeños errores provocados debido a los equipos, factores ambientales y humanos se repartan de manera homogénea a lo largo de todos los tratamientos.
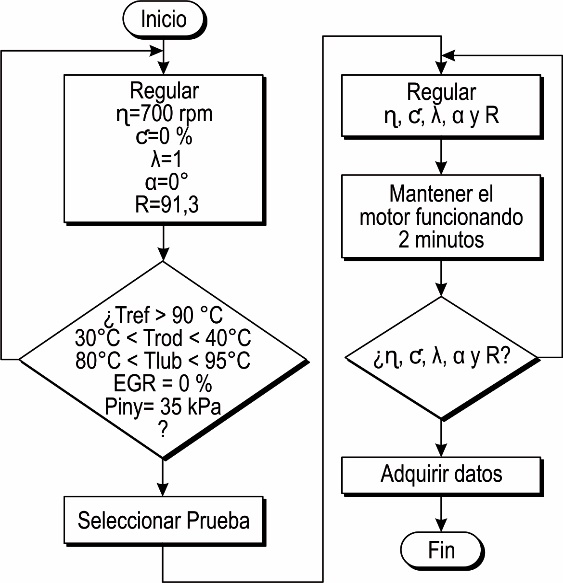
3.4.2 Protocolo de medición
Para garantizar la reproducibilidad y repetibilidad del experimento se tomaron las muestras con el algoritmo que se describe en la Figura 5. Este algoritmo fue desarrollado con el objetivo de disminuir los efectos no deseados en la adquisición de datos basados en (Rivera & Chica, 2015).
4. ANÁLISIS DE RESULTADOS
Para el análisis de resultados se utiliza el software de cálculo estadístico Minitab 17 ®.
4.1 Efectos principales y cruzados
Mediante el análisis de los diagramas de Pareto se obtiene la ponderación de los factores en las variables de respuesta del experimento. En la Tabla 10 se muestran los factores e interacciones que superan e nivel de significancia, ordenados desde el más influyente.
Tabla 10. Efectos principales y cruzados
| Variables de Respuesta | Factores e interacciones de mayor inferencia | |||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
| CO | λ | ƈ | λ ƈ | |||||
| HC | αR | λR | λ ƈ | λƈɳR | λα | ƈɳR | λαƈɳ | ɳR |
| CO2 | λ | λƈ | ƈ | |||||
| O2 | λ | λƈ | ||||||
| NOx | λ | ƈ | ɳ | λɳ | λƈ | ɳƈ | λɳƈ | α |
| F | ƈ | ɳƈ | ɳ | Λ | λɳƈ | αɳ | αƈ | λɳ |
| P | ɳ | ƈ | ɳƈ | λɳƈ | λ | λɳ | Λƈ | αƈ |
| C esp | ɳ | ɳƈ | ƈ | λ | λɳƈ | λɳ | Λƈ | αɳƈ |
Las concentraciones de CO, HC y NOx en los gases de escape son sensibles a los factores e interacciones del experimento, su comportamiento se muestra en el diagrama de efectos principales mostrado en la Figura 6.
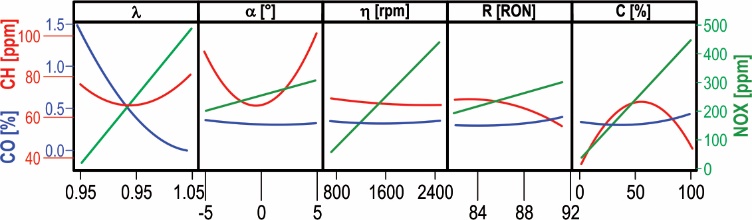
4.2 Monóxido de Carbono
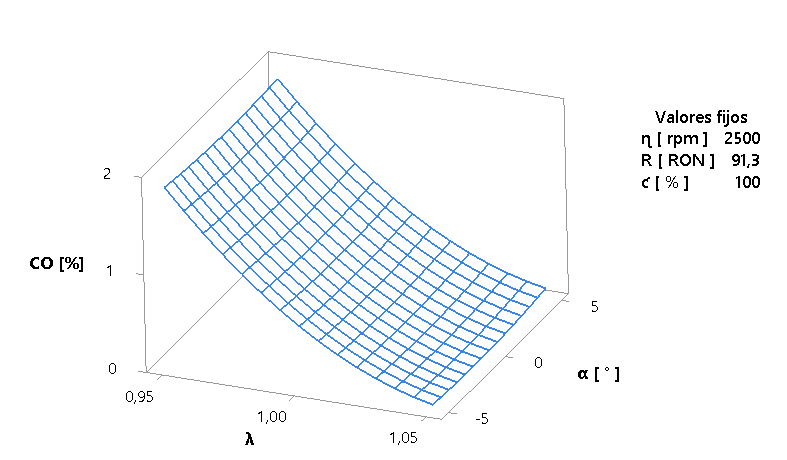
La emisión de CO depende principalmente del factor lambda, mientras más rica es la mezcla más alta es la emisión de CO, contrario a lo que ocurre cuando la mezcla es pobre. La mayor interacción es la producida por los factores lambda y carga. La condición crítica para el incremento la tasa de emisión de monóxido de carbono se da a 2500rpm, 100% de carga y utilizando gasolina súper, esta condición se representa en la superficie que se detalla en la Figura 7.
4.3 Hidrocarburos no combustionados
Los valores mínimos de emisión de HC no se consiguen en el punto original de funcionamiento del motor respecto del factor lambda y del adelanto al encendido, a más que disminuye considerablemente al aumentar el régimen de giro del motor y el octanaje del combustible. Los factores lambda y adelanto al encendido son los que más promueven las interacciones con otros factores en especial con el combustible. En la Figura 8 se muestra la condición de mayor emisión de HC. Los valores de emisión de HC se incrementan ya sea para mezclas extremadamente ricas o pobres, igual que para elevados valores de adelanto al encendido. Para condiciones de funcionamiento con mezcla rica y estequiométrica la emisión de HC disminuye considerablemente utilizando gasolina de mayor octanaje, caso contrario de lo que ocurre con la aplicación de mezclas pobres, donde la emisión disminuye con el uso de combustible de bajo octanaje.
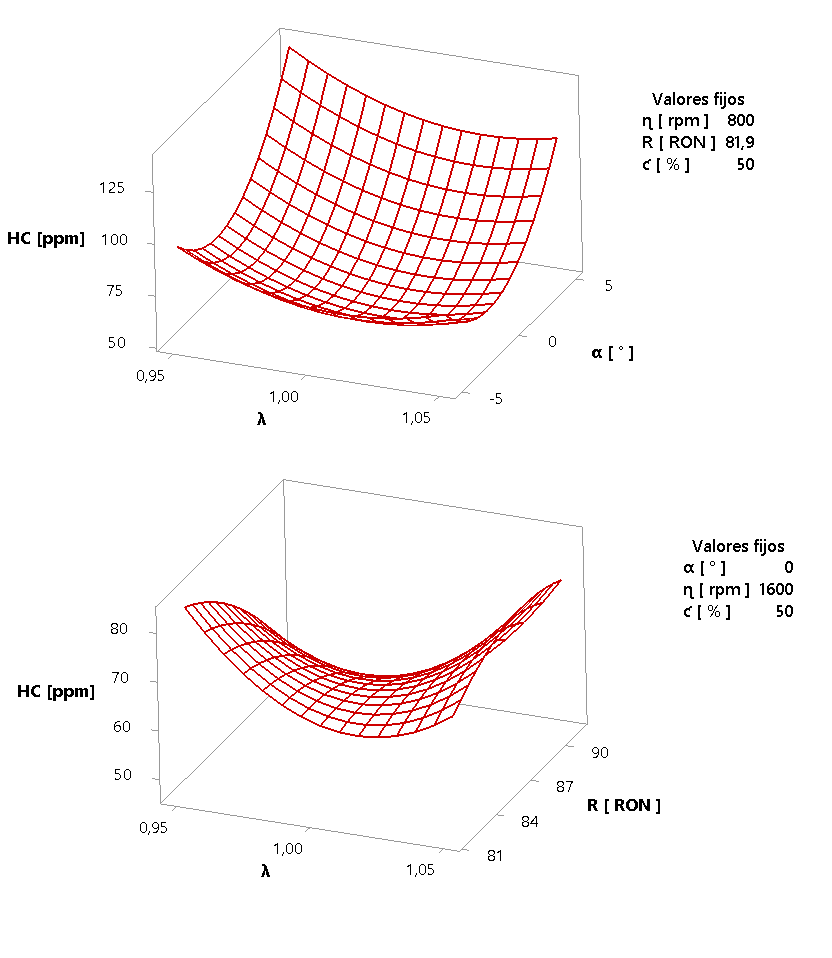
Para el caso del adelanto al encendido los valores de menor emisión de HC se consiguen en cualquier condición con valores de ligero retraso al encendido respecto del punto original de funcionamiento. En la Figura 9 se puede apreciar que existe una condición de emisión mínima de HC que depende del combustible utilizado.
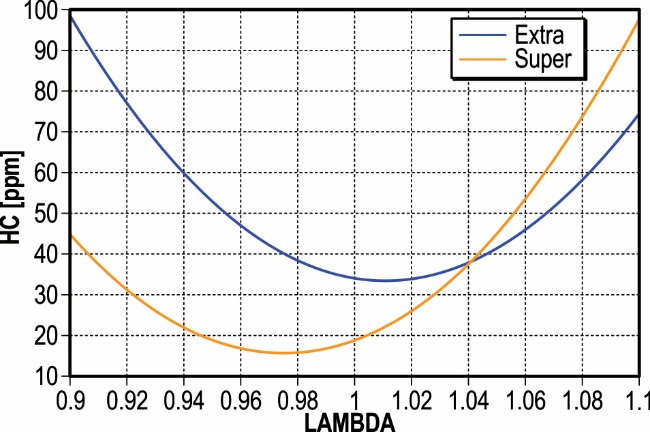
Considerando los efectos principales e interacción de los factores se obtuvieron los valores mínimos de emisión de HC que se detallan en la Tabla 11.
4.4 Óxidos Nitrosos
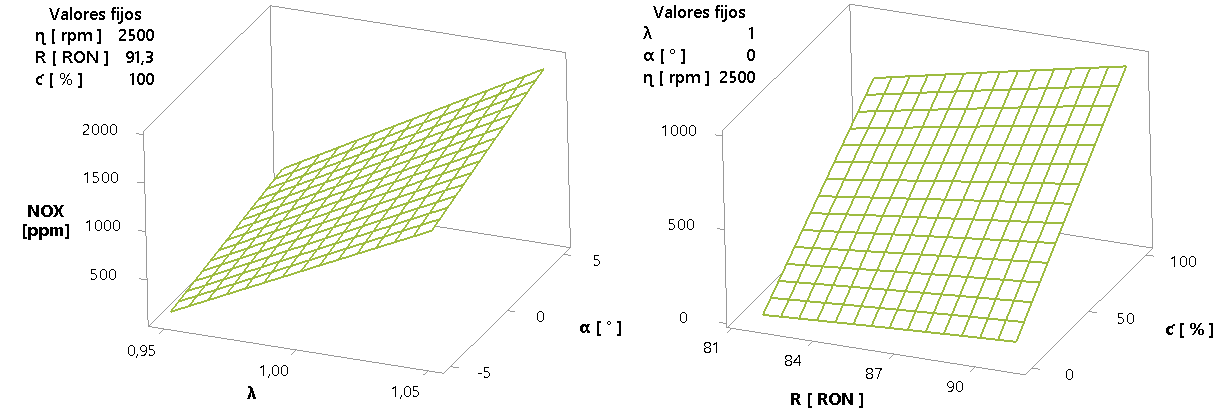
La emisión de NOx es muy sensible a todos los factores y se incrementa bajo condiciones de mezclas pobres, adelantos pronunciados al encendido, altos regímenes de giro, a más del alto octanaje del combustible y la elevada carga externa del motor. Los NOx incrementan su concentración en los gases de escape en condiciones que generen elevadas presiones y temperaturas en la cámara de combustión, como las detalladas en las Figura 10.
4.5 Prestaciones del motor
Según lo expuesto en la tabla 10 la potencia y el torque son directamente proporcionales a ɳ y ƈ. Otros factores influyen de menor manera sobre estas prestaciones como se muestra en la Figura 11.

Los valores máximos de F y P se mostrados en la Tabla 12 se consiguen a 2500 rpm, 100 % de carga y distan de ser los que menores niveles de emisiones contaminantes generan.
Tabla 12. Valores máximos de F y P
| COMBUSTIBLE | λ | α [ ° ] | F [N] | P [kW] |
|---|---|---|---|---|
| EXTRA | 0.95 | 5 | 1585 | 31,69 |
| SUPER | 0.95 | 5 | 1596 | 31,99 |
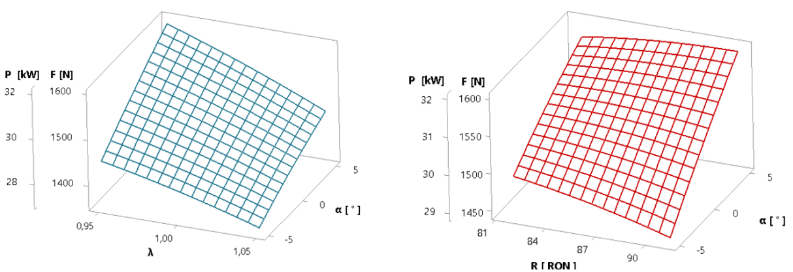
En la Figura 12 se muestra que la fuerza tractora y la potencia incrementan su valor mientras mayor es el adelanto al encendido si se utiliza combustible de alto octanaje.
4.6 Optimización de respuesta
Cada una de las variables de respuesta tiene su propia meta, cuyo objetivo es aumentar las prestaciones y disminuir la concentración de contaminantes en los gases de escape. Los valores objetivos de optimización se muestran en la Tabla 13. Para la optimización se utiliza el método de la máxima pendiente.
Tabla 13. Optimización de respuesta
| Respuesta | Meta | Objetivo | Unidad |
|---|---|---|---|
| P | Maximizar | 31.9 | [ kW ] |
| F | Maximizar | 1596 | [ N ] |
| CO | Minimizar | 0 | [ % ] |
| HC | Minimizar | 16 | [ ppm ] |
| NOx | Minimizar | 0 | [ ppm ] |
| Cesp | Minimizar | 312.72 | [ g/kWh ] |
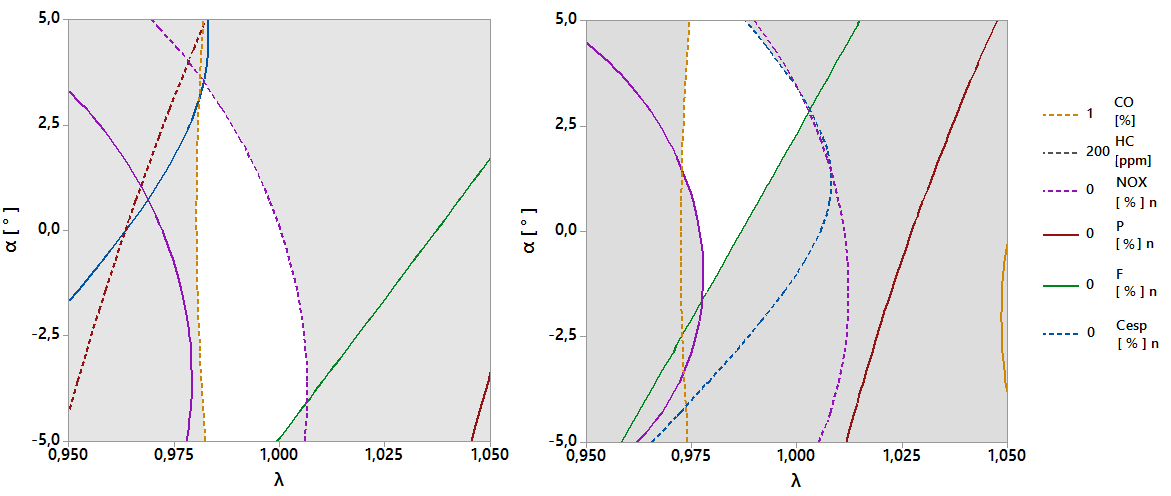
Como se ha dicho anteriormente las emisiones de CO y HC están restringidas por (INEN, Gestión Ambiental Aire Vehículos automotores límites permitidos de emisiones producidas por fuentes móviles terrestres de gasolina, 2002), pero el resto de prestaciones no tienen punto de referencia, es por ello que se generan funciones de NOx, F, P y C normalizadas respecto del estado de funcionamiento normal del motor es decir λ= 1, α = 5 y R=91.3. En la Figura 13 se muestra los contornos generados por estas funciones en 2500 rpm y 100% de carga para a) gasolina súper y b) gasolina extra. Los límites establecidos corresponden a zonas en las que las que F y P se incrementan y Cesp junto a NOx disminuyen respecto del estado normal del motor. En la Figura 13 se puede observar de blanco las zonas de funcionamiento en las que se incrementan las prestaciones del motor sin que la emisión de CO y HC superen los límites normados y la emisión de NOx sea igual o inferior al motor original. La principal restricción que presenta el uso de gasolina súper al incremento de P y F es la emisión de CO, HC y NOx. El uso de gasolina extra conlleva la necesidad de trabajar con mezclas más ricas que las necesarias con súper para incrementar las prestaciones de igual forma limitadas por la emisión CO, HC y NOx.
Mediante el método de máxima pendiente se optimizó el proceso para obtener los resultados mostrados en la Tabla 14.
Tabla 14. Resultados de la Optimización
| Factor | Unidad | Condición normal | Óptimo súper | Óptimo extra |
|---|---|---|---|---|
| ɳ | Rpm | 2500 | 2500 | 2500 |
| Ƈ | % | 100 | 100 | 100 |
| Λ | - | 1 | 0,992 | 0,997 |
| α | ° | 0 | 1,16 | -0,26 |
| R | RON | 91,3 | 91,3 | 81,9 |
| P | kW | 29,51 | 29,98 | 29,47 |
| F | N | 1477 | 1500 | 1474 |
| CO | % | 0,6 | 0,74 | 0,51 |
| HC | ppm | 25 | 23 | 44 |
| NOx | ppm | 971 | 914 | 661 |
| O2 | % | 0,56 | 0,65 | 0,59 |
| CO2 | % | 15,01 | 14,98 | 14,95 |
| Cesp | g/kWh | 342,27 | 338,68 | 356,4 |
Las mejores prestaciones y disminución de contaminantes no se pueden conseguir con λ y α fijos, es por ello que se aplica los resultados de la optimización a diferentes condiciones de funcionamiento y combustibles. En la Figura 14 se muestran las mejores configuraciones de funcionamiento del motor para gasolina súper y extra en función del régimen de giro, la carga del motor y la interacción de estos dos factores.
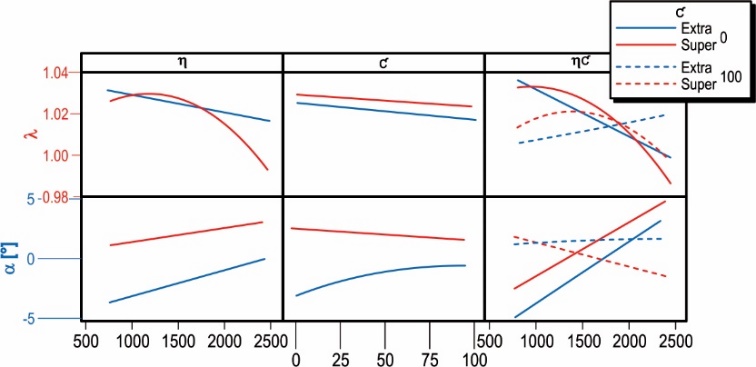
Los dos combustibles pueden trabajar con mezclas ligeramente pobres a bajas velocidades con niveles de carga externa baja; la mezcla debe enriquecerse acorde el motor se acelera y la carga aumenta. La gasolina súper puede trabajar en altas condiciones de carga y régimen de giro con mezcla ligeramente rica y un adelanto al encendido superior al prestablecido por el fabricante, contrario a lo que ocurre con la gasolina extra que no puede trabajar con adelantos superiores a los ya establecidos, debido a la pérdida de potencia e incremento del consumo de combustible y HC.
5. CONCLUSIONES
Las variables de respuesta del motor dependen directamente del combustible utilizado.
Optimizando el valor de λ y α para el uso de gasolina súper se consiguió incrementar la potencia del motor hasta un 1,59 % disminuyendo las emisiones de HC en 8%, NOx en 5.87% y el consumo específico en un 1.05%, con un incremento de 23.33% de CO que dista del límite impuesto por la normativa local.
En el caso de la gasolina extra los resultados muestran que se puede aproximar mucho el funcionamiento del motor al producido con gasolina súper en condiciones normales de operación. De la optimización de λ y α se obtuvo una disminución de tan solo el 0.14% de potencia, frente a una reducción del 15% de CO, 31.93% de NOx y un incremento del 76% de HC que no sobrepasa el límite establecido en (Corporación para el mejoramiento del aire de Cuenca, 2006).
Los resultados de la optimización arrojan que no se pueden mejorar las prestaciones del motor sin alterar las emisiones contaminantes y viceversa.





