











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. INTRODUCCIÓN
A pesar del incremento paulatino del parque automotor en las carreteras del país, la sociedad técnica y los usuarios en general no disponen de una alternativa diferente para determinar el torque y potencia de un motor. En la actualidad la manera más usual de hacerlo es mediante un banco dinamométrico, al cual no se tiene acceso fácilmente debido a su elevado precio adquisitivo y los costos que se desprenden de su servicio. En consecuencia, la investigación en éste ámbito para las universidades y centros de desarrollo tecnológico se ve reducida ya que resulta económicamente inviable. Por otro lado, los talleres automotrices y afines se ven limitados ya que si consideraran el análisis de estos dos parámetros obtendrían una técnica de diagnóstico que les permita evaluar las condiciones de funcionamiento del motor en menor tiempo y una precisa aplicación del respectivo mantenimiento posteriormente.
Para solucionar las necesidades expuestas, con la presente investigación se plantea una manera alternativa de determinar el torque y potencia de un motor de encendido provocado (MEP) mediante el uso de una bujía con sensor de presión adaptado y un modelo matemático que revela las variables que intervienen directamente en el cálculo.
La organización de este artículo es como sigue. La sección II engloba una base teórica que fundamenta la investigación propuesta. La sección III describe los dispositivos y parámetros esenciales para determinar el torque y potencia, incluido el diseño y construcción de un sistema de refrigeración que protege al sensor de presión de las elevadas temperaturas a las que está sometido. Así mismo, mediante un protocolo establecido, se realiza la adquisición y procesamiento de señales efectuando diversas pruebas en el banco dinamométrico a tres vehículos de diferente categoría, los mismos que están en condiciones idóneas de funcionamiento. Posteriormente se efectúa un análisis estadístico en el software Minitab 14 para determinar las variables que representan una incidencia directa para el cálculo. La sección IV hace referencia a la validación del modelo matemático planteado, comparando los resultados obtenidos respecto a los medidos por un banco dinamométrico; además, se analizan los valores de torque y potencia de las pruebas efectuadas en carretera a distintas condiciones de manejo con el objeto de comprobar la coherencia de los mismos.
Finalmente, se incluye las conclusiones a las que se ha llegado al culminar el presente trabajo y las referencias a las cuales se han acudido para sustentarlo.
2. MARCO DE REFERENCIA
2.1 Par motor
La combustión de la mezcla aire-combustible, por acción de la chispa eléctrica, genera un aumento de la presión y temperatura en el interior de los cilindros del motor. Esta presión interior produce a su vez una fuerza de empuje 𝐹 sobre el pistón que lo desplaza generando el clásico mecanismo de biela-manivela de los motores de combustión interna alternativo, donde el movimiento lineal del pistón en el interior del cilindro se transforma en un movimiento rotatorio del cigüeñal. La fuerza que actúa sobre el pistón es proporcional a la presión media efectiva durante la carrera de expansión (Genta et al., 2014), la misma que depende del grado de llenado de los cilindros, de la relación de compresión, de la cilindrada y de la eficacia con que se desarrolla la combustión. En el esquema de la Figura 1, la fuerza 𝐹 ejercida sobre el pistón se descompone en la fuerza 𝐹𝑏 que actúa sobre la cabeza de biela y en la 𝐹𝑛 que produce un empuje lateral sobre las paredes del cilindro.
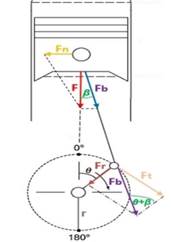
Por lo tanto, el producto de la fuerza 𝐹𝑏 por el radio 𝑟 de la manivela determina el par motor, reflejado aritméticamente en la Ecuación (1).
𝑇 : Torque o par motor (N.m)
𝐹𝑏: Fuerza sobre la biela (N)
𝑟 : Radio de la manivela del cigüeñal (m)
La fuerza 𝐹 que produce el torque es variable, que en un motor de 4 tiempos es máxima en el momento que se lleva a cabo la fase de combustión y su posterior expansión en el cilindro, siendo negativo el torque en las demás fases. Dentro de la etapa donde se genera trabajo el rendimiento del motor no es igual en todos los puntos, depende del régimen de giro y consecuentemente de la fuerza de empuje que se genera. Es así que el número de revoluciones limita el llenado correcto de los cilindros y, por tanto, el par motor. A bajas revoluciones la combustión de la mezcla no resulta óptima debido a la escasa inercia que poseen los gases que provoca que el llenado del cilindro no sea el ideal, al igual que su vaciado. Por otro lado, si el motor funciona a un elevado régimen, tampoco el llenado de los cilindros es completo debido al escaso tiempo que dispone el gas para ocupar todo el espacio disponible (Reif, 2014). Además, a partir del punto óptimo de revoluciones del motor, aunque se queme más combustible acelerando el mismo y consiguiendo que la potencia todavía se incremente más, el par desciende. De ahí que los consumos específicos óptimos estén en valores próximos a la zona de par máximo, aumentando el consumo del motor conforme se aleja de este rango (Genta et al., 2014).
2.2 Potencia
El concepto de potencia expresa cuantas veces está disponible el par motor en el tiempo, es decir, con qué velocidad se puede disponer del par. La potencia desarrollada por un motor depende de la relación de compresión y de la cilindrada, ya que a mayores valores de estas le corresponde mayor explosión y más fuerza aplicada al pistón; también depende íntimamente de las revoluciones por minuto a las que gira el motor. En consecuencia, la potencia puede ser determinada mediante la Ecuación (2).
𝑃 : Potencia del motor (kW)
𝑇 : Torque o par motor (N.m)
𝑤 : Velocidad angular del eje del cigüeñal (rad/s)
𝑛 : Revoluciones por minuto (rpm)
Luego de alcanzar la potencia máxima, el exceso de revoluciones ocasiona que ésta disminuya debido a que el sistema de inyección de combustible tiene un límite operativo, superado el mismo, no tiene precisión suficiente para inyectar el combustible eficazmente; además, el sistema de distribución no es capaz de abrir y cerrar las válvulas con la suficiente velocidad para que los gases de escape y de admisión fluyan adecuadamente. El límite máximo de revoluciones a la que puede girar el motor está establecido por las propias limitaciones de los elementos mecánicos que lo constituyen.
3. MATERIALES Y MÉTODOS
3.1 Sensores y parámetros del motor requeridos para el cálculo del torque y potencia
3.1.1 Presión Media Efectiva (P.M.E)
Es aquella presión promedio por encima de la atmosférica que ejercen los gases sobre el émbolo durante la carrera de expansión del motor al ser quemados por acción de la chispa eléctrica. La P.M.E es proporcional al par motor y para un régimen de rotación determinado, también a la potencia suministrada. El cálculo de la P.M.E se traduce en determinar la presión en el interior del cilindro durante el ciclo de trabajo del motor, lo que es similar a determinar la potencia de la señal; para esto se utiliza un sensor piezoeléctrico que se adapta a la bujía de encendido para brindar mediciones en tiempo real de dicha presión interna. En términos de procesamiento de señales, la energía de la señal es una medida que denota la intensidad o tamaño de la misma. La función de energía de una señal representa la energía disipada por una resistencia de 1 ohm cuando se aplica un voltaje equivalente a la señal de presión del cilindro. En dominio discreto, la energía de la señal viene dada por la Ecuación (3) (Oppenheim, 1998).
La potencia de la señal es la cantidad de energía de la señal consumida por unidad de tiempo en un intervalo (número total de muestras), es decir, la señal vista como una función del tiempo. En dominio discreto, la potencia de la señal viene dada por la Ecuación (4) (Oppenheim, 1998).
El sensor piezoeléctrico a utilizar es de la marca BOSCH y abarca un rango de presiones de 0 a 140 bares. Proporciona una señal analógica, cuyo voltaje es proporcional a la presión que detecta. Además, trabaja en un rango de temperatura de 40°C hasta 130°C.
3.2.1 Tarjeta de adquisición de datos DAQ USB-6008
Es utilizada para el diseño y comando de prototipos, entornos y sistemas reales de una manera versátil y rápida mediante el empleo de software y hardware flexibles. Está en la capacidad de tomar información del entorno por medio de sus pines de entrada de toda una gama de sensores y puede controlar actuadores mediante sus pines de salida. Es posible la transferencia de datos de ésta al ordenador ya que tiene la capacidad de ser programable por medio de diferentes softwares como el Labview, utilizado en la presente investigación, permitiendo desarrollar códigos en tiempo real mediante USB. Las principales especificaciones técnicas de la tarjeta electrónica se citan en la Tabla 1.
Tabla 1 Especificaciones técnicas de la tarjeta DAQ USB-6008.
| Denominación | Valor |
|---|---|
| Voltaje de funcionamiento | 4,1 - 5,25 VDC |
| No. pines de entrada analógicos de un solo terminal | 8 |
| No. pines de entrada analógicos diferenciales | 4 |
| No. pines de salida analógicos | 2 |
| No. pines de entrada/salida digitales | 12 |
| Temperatura ambiental de operación | 0-55ºC |
| Velocidad del Bus USB | 12Mb/s |
| Dimensiones | 8,51x8,18x2,31 cm |
3.2.2 Vehículos de prueba
Se dispuso de 3 vehículos que estuvieron en condiciones idóneas de funcionamiento, es decir, sin presentar problemas mecánicos, eléctricos o electrónicos que pudiesen afectar los resultados de la investigación. Además, estos vehículos que corresponden a la misma marca, en sus distintas categorías son los más vendidos en el país (PRO Ecuador, 2013). Sus especificaciones técnicas se detallan en la Tabla 2.
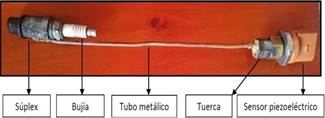
3.2.3 Adaptación a la bujía de encendido
Para efectos de monitoreo de la presión en el interior del cilindro es necesario realizar una adaptación a la bujía de encendido. Ésta consiste en acoplar un tubo metálico a la bujía para que los gases sean guiados desde el interior del cilindro hasta el sensor de presión que es ajustado en el extremo de la misma. Para esto se hace uso de un súplex y un tubo delgado. La adaptación realizada no perjudica el funcionamiento correcto del cilindro analizado y del motor en general. El acople terminado se observa en la Figura 2.
Tabla 2 Especificaciones técnicas de los vehículos de prueba
| Denominación | Descripción | |||
|---|---|---|---|---|
| Marca | Chevrolet | Chevrolet | Chevrolet | |
| Modelo | Aveo | Grand Vitara | Luv D-max 4x2 | |
| Año de fabricación | 2009 | 2011 | 2010 | |
| Cilindrada total | 1,4 lt | 2,0 lt | 2,4 lt | |
| Compresión del motor | 9,5:1 | 9,3:1 | 9,6:1 | |
| Número de cilindros | 4 | 4 | 4 | |
| Potencia máxima | 68,66 kW a 6200 rpm | 94 kW a 6000 rpm | 92,5 kW a 4800 rpm | |
| Torque máximo | 130 Nm a 3400 rpm | 174 Nm a 4300 rpm | 195 Nm a 3600 rpm | |
Por las elevadas temperaturas a las que está sujeto el sensor piezoeléctrico es necesario disponer de un sistema de refrigeración para prevenir daños al efectuar los distintos ensayos experimentales. En la Figura 3 se observa el sistema de refrigeración, el cual está compuesto de un ventilador y un disipador de calor; para la construcción de éste último se realizó previamente un análisis de su diseño mediante el software ANSYS. Según los cálculos obtenidos, el disipador garantizará la evacuación de calor necesaria para que el sensor trabaje dentro de su rango normal de temperatura. La construcción del disipador de calor se realiza por fundición en un molde de arena.

3.3 Adquisición de señales
Se extrae la señal del sensor de presión en tiempo real mediante el uso de los terminales analógicos de la DAQ USB-6008 y la programación en el software Labview. El canal de la tarjeta de adquisición de datos es configurado de tal manera que se obtienen 2500 datos de voltaje por cada segundo, esto debido a que el pistón trabaja a grandes velocidades dentro del cilindro y es preciso obtener varios valores que demuestren el comportamiento exacto de la presión en las distintas fases de funcionamiento del motor.
Previamente se realizaron 5 pruebas aleatorias estacionarias que consisten en revolucionar el motor del vehículo, es decir, acelerarlo mientras está estacionado con el objeto de analizar el comportamiento de la presión generada en el cilindro durante las fases de trabajo del mismo. Se observó que las presiones captadas variaban de manera insignificante a pesar de las revoluciones de giro variables a las que se sometió al motor; en consecuencia, estas pruebas se descartaron ya que resultan deficientes para el cálculo del torque y potencia. Ante esto, fue preciso aplicar carga física al vehículo, generando un esfuerzo al motor que incrementen las presiones de trabajo, procediendo así a utilizar el banco dinamométrico, es decir, realizar las pruebas dinámicas.
3.3.1 Pruebas dinámicas
Se realizan 17 pruebas que corresponden a velocidades de circulación promedio para cada vehículo en el dinamómetro, obteniendo 2500 voltajes por cada una de ellas. En la Tabla 3 se detallan las velocidades del vehículo para las pruebas efectuadas. Se ejecuta cada prueba siguiendo un protocolo amparado en las normas NTE INEN 960, SAE J1349, ISO 1585:1992 e IS 14599:1999, donde se establece el método general de ensayo para la evaluación del rendimiento de vehículos automotores, con el propósito de determinar los valores de torque y potencia a carga completa como funciones de la velocidad de la máquina.
Tabla 3 Velocidades del vehículo en las distintas pruebas dinámicas.
| Nro. de prueba | Velocidad del vehículo (km/h) | Nro. de prueba | Velocidad del vehículo (km/h) |
|---|---|---|---|
| 1 | 50 | 10 | 60 |
| 2 | 75 | 11 | 80 |
| 3 | 100 | 12 | 85 |
| 4 | 75 | 13 | 60 |
| 5 | 50 | 14 | 110 |
| 6 | 100 | 15 | 90 |
| 7 | 50 | 16 | 85 |
| 8 | 75 | 17 | 110 |
| 9 | 120 |
Como establecen las normas, se puede utilizar cualquier equipo que permita verificar las condiciones de rendimiento del motor, en este caso se hace uso del banco dinamométrico de rodillos, ya que ofrece control y precisión en el desarrollo de todas las pruebas. El protocolo contempla lo siguiente:
Uso de igual combustible. Para el presente caso, gasolina súper (92 octanos).
Idéntica altura relativa. En este caso, 2500 msnm (Cuenca, ciudad donde se efectuó la investigación), por lo tanto presión barométrica igual a 0,77 bar.
Similar temperatura del aire de admisión al motor monitoreada por la IAT (sensor de temperatura del aire de admisión) = 23°C ±1°C.
No se ejecuta la prueba cuando el ventilador está funcionando (aplica a vehículos cuyo ventilador no funciona constantemente).
Temperatura idónea del refrigerante, en un rango de 87 a 93°C.
Temperatura similar de la banda de rodadura entre 30 y 35°C, medida por un pirómetro. Además, un buen estado de la banda de rodadura.
No se deben tomar datos a menos que la velocidad haya sido mantenida constante por lo menos durante un minuto y en cuarta marcha, ya que representa la relación de transmisión directa. Además, el pedal del acelerador es pisado a fondo.
La velocidad del motor durante una prueba o lectura no debe desviarse de la velocidad seleccionada en más de ± 1% o en ± 10 rpm.
Los 2500 datos de voltaje que se obtienen en un segundo en cada prueba mediante la DAQ son exportados a Excel para su posterior análisis.
El ciclo gráfico para llevar a cabo las pruebas dinámicas puede ser planteado, por ejemplo, con una de las pruebas realizadas como se muestra en la Figura 4. En él se observa que la velocidad del vehículo asciende paulatinamente hasta llegar en cuarta marcha a 75 km/h con el pedal del acelerador pisado a fondo, esto en un lapso de 10 segundos. Se mantiene esta velocidad constante durante un minuto y al final de aquel periodo se procede a tomar los datos con la DAQ. Posteriormente, se desciende la velocidad del vehículo gradualmente, para esto se emplea otros 10 segundos, finalizando la prueba.

Además de obtener los voltajes medidos por el sensor de presión durante las diversas pruebas, también se recopila los valores de potencia, rpm y fuerza de arrastre en las distintas velocidades constantes del vehículo que brinda el banco dinamométrico. Estas variables son sometidas a un análisis estadístico posteriormente para comprobar su incidencia en los resultados.
3.4 Procesamiento de señales
Para obtener la presión (magnitud física) medida por el sensor piezoeléctrico en el interior del cilindro, es necesaria la creación de una función en la cual la presión dependa del voltaje (magnitud eléctrica). Para esto, en primera instancia se colocó el sensor en un banco de inyección de Riel Común (CRDi), el cual presenta la capacidad de variar y fijar de manera constante la presión en el riel de combustible, por lo que se puede tomar varias muestras de la presión con el respectivo voltaje que brinda el sensor. Además, posteriormente se acopló el sensor junto con un manómetro en un cilindro del motor con el objeto de tomar muestras de presiones bajas con sus respectivos voltajes.
Para crear una función que rija debidamente el comportamiento del sensor en todas las condiciones, se obtuvieron nuevos puntos de presión y voltaje al efectuar interpolaciones lineales, partiendo del conocimiento del conjunto discreto de datos proporcionados por el manómetro y el banco CRDi.
Las muestras se ingresan en forma de vectores y se las grafica mediante el MATLAB, obteniendo un polinomio de grado 2 que se muestra en la Ecuación (5), el mismo rige la presión del sensor en función de su voltaje. Con esta información se diseña en el software Labview el algoritmo matemático para el procesamiento de señales.
Para desarrollar el modelo matemático se han utilizado los datos de voltaje y posteriormente conversión a presión, ambas magnitudes en bruto proporcionadas por el sensor; es decir, no se ha implementado ningún tipo de filtro, puesto que es necesario considerar el comportamiento exacto y real de la señal monitoreada en el tiempo bajo las distintas condiciones de funcionamiento del motor con el objetivo de incluir y no descartar valores de voltaje que pueden ocasionar la imprecisión del modelo desarrollado. La presión del interior del cilindro, sin filtro, se observa en la Figura 5.

3.5 Desarrollo del algoritmo para el cálculo del torque y potencia
En éste apartado se procede a realizar en el software Minitab un análisis estadístico de las variables físicas que se extraen de las pruebas dinámicas de los tres vehículos citados, considerando que de los 2500 voltajes proporcionados por prueba realizada, se divide aún más el conjunto de muestras a 500 voltajes para cada análisis; es decir, en lugar de tener 17 pruebas con 2500 voltajes para cada una, se analiza 85 pruebas con 500 voltajes. Esto con el fin de generar un algoritmo matemático más preciso en base a un análisis estadístico con un mayor número de muestras.
3.5.1 Cálculo del torque
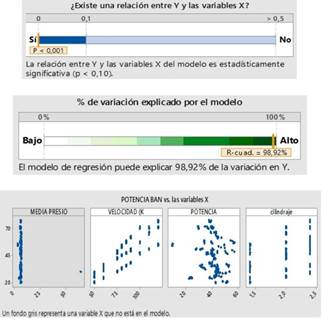
Se procede a analizar la velocidad del vehículo, proporcionada por el banco dinamométrico, además, la potencia de la señal (equivalente a la P.M.E) que es calculada con la Ecuación (4) en el software Matlab y el cilindraje en litros del motor. Cabe destacar que también se analizó la fuerza tractora del neumático, sin embargo no mostró una influencia coherente con el torque. Se realiza una regresión múltiple con las tres variables citadas que afirma la influencia directa de las mismas con el torque como se muestra en los resultados de la Figura 6. De éste análisis se desprende la Ecuación (6) que rige el torque de vehículos comprendidos en una cilindrada de 1.4 a 2.4 litros.
𝑥2: Potencia de la señal
𝑥3: Velocidad del vehículo (km/h)
𝑥4: Cilindraje del vehículo (L)

3.5.2 Cálculo de la potencia
De similar manera que en el cálculo del torque, los resultados de la regresión múltiple que se muestran en la Figura 7 manifiestan la relación directa de la potencia del motor con las variables potencia de la señal, velocidad del vehículo y cilindraje. Del análisis estadístico se obtiene la Ecuación (7) que rige la potencia de vehículos comprendidos en un rango de cilindrada de 1.4 a 2.4 litros.
𝑥2: Potencia de la señal
𝑥3: Velocidad del vehículo (km/h)
𝑥4: Cilindraje del vehículo (L)
4. RESULTADOS Y DISCUSIÓN
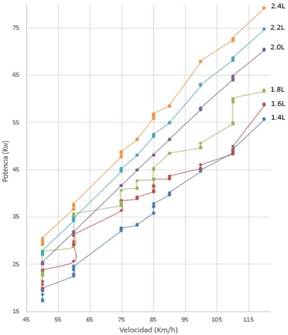
Para hacer uso de las Ecuaciones (6) y (7) es necesario que el usuario calcule la potencia de la señal en base al protocolo descrito anteriormente, con la diferencia que al ser una prueba de carretera se debe mantener constante la velocidad del vehículo durante 5 segundos, según la norma SAE J1349, antes de capturar los datos de voltaje que brinda el sensor. Además, son indiferentes las condiciones ambientales donde se efectúe la prueba, las condiciones de carga del vehículo y el correcto estado del mismo, ya que los resultados de par motor y potencia dependen netamente de la potencia de la señal, es decir, de la presión que acaece dentro del cilindro del motor. Por otro lado, las Figuras 8 y 9 muestran, respectivamente, el comportamiento del torque y potencia de vehículos según el tipo de cilindraje indicado a 2500 msnm (Cuenca); los diagramas a otras alturas sobre el nivel del mar se muestran en el documento de la tesis.
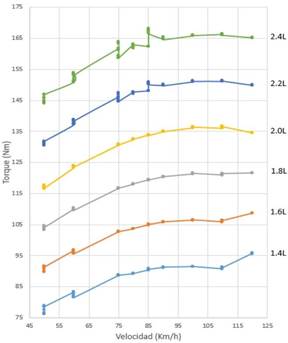
Para hacer uso de las Figuras 8 y 9, el motor debe estar en condiciones idóneas de funcionamiento, sin presentar ningún problema mecánico, eléctrico o electrónico. Además, ya no es necesario calcular la potencia de la señal, bastará con conocer la velocidad de circulación promedio y cilindrada del vehículo para obtener el par motor y potencia a la altura descrita. En todas las pruebas que se realicen el motor debe estar siempre sometido a plena carga y es preciso seguir el protocolo que se mencionó anteriormente. Se debe mantener constante la carga y velocidad del vehículo durante 5 segundos (realizar prueba en pendiente para obtener la carga máxima).
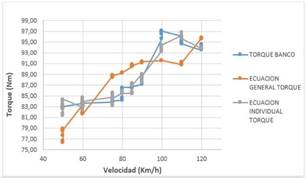
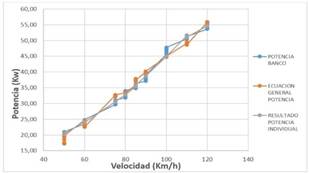
4.1 Análisis del par motor y potencia respecto al banco dinamométrico
En el presente análisis se puede atestiguar las similitudes en comparación del diagrama del torque y potencia de la ecuación individual calculada para el Chevrolet Aveo, el diagrama obtenido por el banco dinamométrico para mencionado vehículo y el diagrama de la ecuación general que cubre el rango de cilindrada de 1,4 a 2,4 L. De las Figuras 10 y 11 se concluye que para la ecuación individual se obtiene factores de error con una media del 2,25% respecto a los resultados del banco dinamométrico; además, alcanza un error máximo de 4,5% en bajos regímenes y 0,005% en altos regímenes de funcionamiento. En lo que respecta a la ecuación general, se obtiene factores de error con una media del 8,5 % respecto a los resultados del banco dinamométrico, alcanzando un error máximo de 17% en bajos regímenes y 0,005% en altos regímenes de funcionamiento. Todo esto aplica tanto para el torque como la potencia. Según los resultados se concluye que mientras se realicen las pruebas a un mayor régimen de funcionamiento del motor, mayor será la precisión del modelo propuesto.
4.2 Pruebas en carretera a distintas condiciones de manejo
Este apartado presenta los resultados de diversas pruebas realizadas en vía de asfalto y hormigón a diferentes pendientes y velocidades. Todas las pruebas se efectúan en cuarta marcha debido a que representa la relación de transmisión directa y en vía seca por seguridad. La prueba consiste en extraer durante 1 segundo los 2500 voltajes mediante la DAQ, los mismos que posteriormente son transformados a presión para el cálculo de la potencia de la señal y poder utilizar de esta manera las Ecuaciones (6) y (7) propuestas.
El vehículo utilizado es un Mazda Allegro 1.6 L., y en cada prueba es sometido a plena carga para obtener una mejor apreciación de los resultados. La tabla 4 muestra una síntesis de los resultados de las pruebas realizadas en carretera. En la vía con asfalto como en la de hormigón, se puede observar que se obtiene un mayor torque y potencia con el incremento de la velocidad, tanto a una pendiente de 10˚ como a 12˚ y 13˚. Por consiguiente, se confirma la influencia directamente proporcional que tiene la velocidad del vehículo con estos dos parámetros del motor. Al analizar las pruebas en vía de asfalto, ambas a una velocidad de 70 km/h, el par motor como la potencia disminuyen al aumentar la pendiente de 10˚ a 12˚ como se observa en la Figura 12. Esto es debido a que la pendiente aumenta la resistencia a la traslación que el vehículo tiene que vencer, ocasionando que la velocidad y el número de revoluciones disminuyan en un menor lapso de tiempo y, a su vez, decrezca el rendimiento del motor. Es decir, para el caso puntual, el vehículo ya no está trabajando en su régimen útil de revoluciones, ya ha llegado a su máximo régimen de funcionamiento y ha comenzado a decaer.
Figura 12 (a) Disminución del torque a 70 km/h en vía de asfalto, (b) Disminución de la potencia a 70 km/h en vía de asfalto
Un diferente resultado se puede apreciar en las pruebas en vía de hormigón, ambas a una velocidad de 50 km/h; en este caso el par motor y la potencia se incrementan al pasar de una pendiente de 10˚ a 13˚ como se muestra en la Figura 13. Esto se debe a que el vehículo aún está trabajando en su régimen útil de revoluciones, es decir, aún no ha llegado a su máximo régimen de funcionamiento antes de decaer.
Figura 13 (a) Aumento del torque a 50 km/h en vía de hormigón, (b) Aumento de la potencia a 50 km/h en vía de hormigón
A un régimen de revoluciones bajas la potencia del motor también es relativamente baja, esto justifica los valores pequeños obtenidos de éste parámetro para las pruebas realizadas a 50 km/h, que por supuesto se compensa por ser efectuada en pendiente; además, en el resto de pruebas mejora ya que se aplican mayores velocidades al vehículo como se puede observar en la Tabla 4.
Tabla 4 Resumen de resultados de las pruebas en carretera
| Vía | Pendiente | Velocidad del vehículo(km/h) | Torque(N.m) | Petencia(kW) |
| Asfalto | 10˚ | 50 | 88,15 | 17,2 |
| Asfalto | 10˚ | 60 | 106,93 | 39,37 |
| Asfalto | 10˚ | 70 | 119,58 | 63,63 |
| Asfalto | 12˚ | 50 | 104,54 | 37,77 |
| Asfalto | 12˚ | 60 | 111,90 | 44,79 |
| Asfalto | 12˚ | 70 | 117,77 | 56,65 |
| Hormigón | 10˚ | 50 | 90,17 | 19,77 |
| Hormigón | 10˚ | 60 | 109,70 | 44,73 |
| Hormigón | 10˚ | 70 | 121,80 | 65,22 |
| Hormigón | 13˚ | 50 | 99,69 | 30,16 |
| Hormigón | 13˚ | 60 | 112,10 | 46,81 |
| Hormigón | 13˚ | 70 | 115,60 | 53,75 |
En lo que concierne al tipo de pavimento, el coeficiente de rozamiento o fricción juega un papel preponderante, puesto que las interacciones entre las dos superficies en contacto están ligadas por la naturaleza de las partículas microscópicas.
Además, éste coeficiente depende de muchos factores como la temperatura, el acabado de las superficies, la velocidad relativa entre las superficies, etc. Como se observa en la Tabla 5, se tiene un mayor coeficiente de rozamiento dinámico del neumático sobre el concreto seco respecto al asfalto seco, cuya diferencia es mínima. Sin embargo, esto influye para tener una mayor adherencia con la superficie. Por consiguiente, al tener mayor adherencia, que se traduce en tener más agarre del neumático con la calzada, se obtiene un mayor par motor y potencia de las pruebas en hormigón con respecto a las de asfalto o alquitrán, ambas a una pendiente de 10˚, como se aprecia en la Tabla 4.
Tabla 5 Coeficientes de rozamiento dinámico (Fullerton, 2011)
| Denominación | Valor aproximado |
| Neumático sobre asfalto seco | 0,67 |
| Neumático sobre asfalto mojado | 0,53 |
| Neumático sobre concreto seco | 0,68 |
| Neumático sobre concreto mojado | 0,58 |
5. CONCLUSIONES
Mediante la presente investigación fue posible la determinación del par motor y potencia de una manera alternativa, aplicada a los vehículos de 1,4 a 2,4 litros de cilindraje. El cálculo del par motor y potencia propuesto se rige por variables tales como la velocidad del vehículo, el cilindraje y la potencia de la señal, estando implícita dentro de ésta última la presión del interior del cilindro medida por el sensor.
Los resultados experimentales del modelo matemático planteado para el torque y potencia no exhiben una diferencia estadística altamente significativa respecto a los medidos por el banco dinamométrico; se obtuvo un intervalo de confianza (IC) del 92%, alcanzando un error máximo del 17% a bajos regímenes de funcionamiento y 0,005% en altos regímenes.
El modelo matemático propuesto brinda dos alternativas diferentes de medir el par motor y potencia de un vehículo de encendido provocado. La primera manera de hacerlo es utilizando las Ecuaciones (6) y (7), las cuales otorgan resultados más exactos; además, para hacer uso de éstas no es necesario que el vehículo esté en condiciones idóneas de funcionamiento y las condiciones de carga máxima no son necesarias. La segunda opción es hacer uso de los diagramas de torque y potencia propuestos. Éstos exigen que el vehículo esté funcionando correctamente sin presentar problemas mecánicos, eléctricos o electrónicos; además, es preciso que la prueba se ejecute a carga máxima. Ambas alternativas deben llevarse a cabo siguiendo el protocolo establecido.
Al estar el vehículo sometido a carga, por ejemplo al transitar por una pendiente, se obtiene un mayor torque y potencia con el incremento de la velocidad, siempre y cuando el vehículo aún este trabajando en su régimen útil de revoluciones, es decir, que aún no haya llegado a su máximo régimen de funcionamiento.




