











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
En [1] se define a una microrred, como un conjunto de cargas interconectadas y distribuidas, recursos energéticos con energía eléctrica que actúan con la red con la capacidad de conectarse y desconectarse lo que permite la operación en red y en isla. Se puede considerar como microrred a la red que cuenta con las siguientes características: a) Contar con limites eléctricos definidos, b) un control maestro para operar la generación distribuida y las cargas de manera que puedan comportarse como una sola entidad controlable.
Otra característica importante es que los recursos de energía distribuida DER (Distribution Energy Resources) deben contar con una capacidad superior a la carga máxima del sistema lo que permitiría desconectarse de la red publica lo que quiere decir en modo isla sin presentar eventualidades. Además, presentan la capacidad de regular y distribuir el flujo de electricidad. Las microrredes son más que una generación de respaldo ya que brindan beneficios mucho mas flexibles que la generación de reserva. [2]
Los componentes que conforman una microrred incluyen cargas, recursos de energía distribuida, control maestro, elementos de interrupción y distribución de energía inteligentes, elementos de protección, comunicación y automatización. [1]
En este sentido existe la necesidad de comprender los fenómenos que pueden ocurrir al realizar la integración de una microrred a la red principal, tanto ventajas que puedan ser explotadas como los inconvenientes que puedan aparecer y deban ser mitigados.
La integración los sistemas de energía modernos en diferentes plataformas modernas representan un gran desafío. En la actualidad los riesgos involucrados hacen referencia a la interconexión directa de subsistemas debido al mantenimiento y actualizaciones de las plataformas integradas.
Los enfoques modernos de diseño disminuyen los riesgos a través de el uso extensivo de simulación y tecnologías como simulación Hardware in the loop (HIL). Estas simulaciones permiten que la integración sea gradual disminuyendo costos que provienen del riesgo de inversión. HIL es una herramienta que permite el uso de prototipos analógicos, debido a que cuenta con límites de seguridad operacional de los dispositivos reales. [3]
Desde el invento de la primera unidad de medición fasorial PMU basada en el sistema de posicionamiento global (GPS) en 1988 la tecnología de fasores ha ido evolucionando durante las últimas décadas, durante este periodo se ha n propuesto e implementado varios conceptos prometedores como el sistema de medición/ supervisión de área amplia (WAMS). [4]
En los últimos años el sistema de energía eléctrica experimenta grandes cambios debido a la inclusión de equipos avanzados, la expansión de la red de transmisión, distribución y la integración de varias fuentes de energía renovable.
Con la integración de nuevas fuentes de energía a la red convencional, el sector eléctrico se encuentra en una migración tecnológica, tanto en las redes de abastecimiento como en las herramientas de análisis. Por lo tanto, resulta necesario el estudio de las herramientas computacionales existentes y su capacidad de integración a elementos físicos de la red, para aprovechar la tecnología actual.
Es por este motivo que en el presente articulo se plantea la metodología de implementación de (HIL) la cual integra: equipos físicos en este caso una PMU, software de simulación en tiempo real (HYPERSIM) y la herramienta WAMS. Esta integración tecnológica permitirá realizar estudios que van de la mano con la evolución tecnológica del sistema eléctrico de potencia.
Uno de los fenómenos más críticos dentro de una microrred es la respuesta a la demanda y la presencia de reserva para garantizar que la frecuencia del sistema se encuentre dentro de los límites permitidos. En caso de una perturbación como la salida intempestiva de generación o carga, el control de frecuencia debe presentar una respuesta inercial y una respuesta primaria que ayude a la rápida estabilización.
El modelo propuesto es desarrollado para un monitoreo de área amplia en tiempo real mediante el sistema WAMS de CENACE con lo cual se puede capturar la respuesta tanto estacionario como dinámica del sistema, esto se logra mediante la inclusión de un punto de monitoreo mediante una PMU física marca SEL, este dispositivo actúa como un agente inteligente con capacidades de supervisión, control y protección distribuida. Finalmente, se realiza la monitorización del sistema en tiempo real aplicando una estimación precisa del estado de la microrred permitiendo así evaluar la estabilidad del sistema ante diferentes escenarios operativos
La estructura del presente artículo es la siguiente: en la sección 2 se presenta un estado del arte de las metodologías de simulación, en la sección 3 los estudios que pueden ser realizados con la ayuda de WAMS, en la sección 4 la afectación en la frecuencia en sistemas con penetración de energía renovable, en la sección 5 la implementación de HIL, en la sección 6 los resultados obtenidos y por último la sección 7 con las conclusiones.
TECNOLOGIAS DE SIMULACIÓN
Los simuladores de sistemas de potencia se pueden clasificar de la siguiente manera, en función de su modo de funcionamiento:
Offline
La mayoría de los simuladores de sistemas de potencia están fuera de línea, lo que significa que las simulaciones se realizan en un computador los cuales proporcionan los resultados en un archivo de salida o en pantalla. En este tipo de simulación no existe una interacción con un equipo externo. Los modelos de los equipos y dispositivos analizados deben ser modelados dentro del simulador, una de las características mas importantes es que la velocidad de simulación con ningún evento sucede en tiempo real.
Online
Los simuladores en línea interactúan e intercambian datos con un sistema en línea y se puede controlar la red eléctrica física real. Estos simuladores son empleados típicamente para estudios de estabilidad transitoria.
Tiempo real
La simulación digital en tiempo real (RTDS) de un sistema eléctrico se define como la reproducción de las formas de onda de las señales eléctricas de salida con la precisión deseada para de esta forma representar el comportamiento del sistema eléctrico real que se está modelando. Para lograr este objetivo, un simulador digital en tiempo real necesita resolver las ecuaciones del modelo para un paso de tiempo dentro del mismo tiempo en el reloj del mundo real [5], [6].
En función del paso de tiempo requerido para realizar el cálculo de las salidas de estado del sistema modelado para cada paso de tiempo pueden darse dos situaciones [7]:
Si el tiempo de ejecución (Te) de la simulación es igual al paso de tiempo seleccionado, se considera que la simulación es en tiempo real. Si el tiempo de ejecución (Te) de la simulación es mayor que el tamaño del paso de tiempo para uno o más pasos de tiempo, se produce un sobrepaso de tiempo y la simulación se considera fuera de línea.
La Figura 1 ilustra los tipos de simulación antes mencionados dependiendo del tiempo de ejecución de la simulación:

Las características más relevantes de los simuladores en tiempo real son las siguientes:
El hardware debe estar compuesto de múltiples procesadores que operan en paralelo para de tal forma crear una plataforma de ejecución de simulación en tiempo real de una manera distribuida en cuanto a procesamiento computacional.
Se utiliza un computador central en el cual se prepara y compila el modelo para luego cargarlo a la plataforma de procesamiento distribuido, este computador también es utilizado para supervisar los resultados de la simulación en tiempo real.
Terminales y tarjetas que permitan disponer de entradas y salidas (I/O) físicas que permiten interactuar a la simulación con el hardware externo.
Una red de comunicaciones para intercambiar datos entre diferentes dispositivos, plataformas, sistemas o softwares de tal manera de integrar una serie de funciones que permitan disponer de múltiples objetivos dentro de la simulación.
Adicionalmente la simulación digital en tiempo real permite tener un enfoque que permite integrar varios conceptos dentro del modelo como el de integrar la simulación con su contraparte física, permitiendo implementar un desarrollo de un circuito cerrado de retroalimentación en un entorno virtual con un entorno físico permitiendo ofrecer una plataforma de diseño y verificación de sistemas integrados.
Una simulación en tiempo real Hardware In The Loop (RTHIL) se refiere a una plataforma en la cual la simulación interactúa con componentes físicos reales. La simulación RTHIL se utiliza a menudo para comprender el comportamiento o funcionamiento de un dispositivo real cuando se lo integra al sistema eléctrico o a su vez permite la interacción entre la simulación de la red un sistema de monitoreo y análisis a través de dispositivos de medida y control. [8].
Todo el diseño de la plataforma de simulación RTHIL se basa en la configuración hibrida de simulación (software) y hardware (conexiones físicas) y su interconexión a través de señales analógicas y digitales de entrada/salida (I/O).
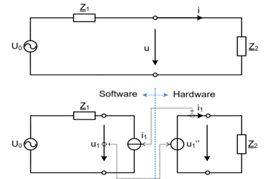
La flexibilidad de un simulador digital en tiempo real permite la configuración e integración de la simulación y el comportamiento del hardware conectado. La Figura 2 muestra el concepto y arquitectura básica de una simulación RTHIL en la que la señal de referencia obtenida en el sistema simulado se aplica a los terminales del hardware real a través de una salida analógica, y la corriente medida en el circuito del hardware se regresa a la simulación como señal de retroalimentación [9].
Dentro del procedimiento de diseño de un sistema de protección o un dispositivo de control es importante realizar una prueba mediante RTHIL la cual ayudara a transferir el diseño del modelo a la implementación final del hardware, este procedimiento incluye la simulación de software y la prueba de hardware mediante un lazo de control.
SISTEMA DE SUPERVISIÓN DE ÁREA Amplia (WAMS)
Las redes de los sistemas de potencia pueden considerarse las mas amplias de la actualidad lo cual provoca que se enfrenten a grandes desafíos de ingeniería que deben ser superados.
El crecimiento de las redes de generación y transmisión esta limitado debido a las restricciones sociales que evitan la construcción de nuevas plantas, subestaciones, líneas, así como cualquier otra instalación de gran volumen, considerando estos factores la optimización de recursos disponibles se vuelve imprescindible para llevar la operación del sistema eléctrico a sus limites de estabilidad y seguridad [10].
El suministro continuo de energía eléctrica es muy esencial para la vida humana moderna que se da por sentado hasta que, inesperadamente y sin previo aviso, ocurre un apagón, lo que resulta en una interrupción completa del suministro de energía en un área o regiones enteras. La mayoría de estos incidentes de apagón son provocados por disparos en cascada debido a las fallas de cortocircuito, sobrecarga, mal funcionamiento del equipo y otras perturbaciones externas como tormentas eléctricas, malas condiciones climáticas y accidentes de incendio. [10]
Aplicaciones WAMS
Las funciones que dispone el WAMS se pueden clasificar en funciones básicas y avanzadas las cuales se describen a continuación.
Plataforma integrada de datos fasoriales
El principal objetivo de esta función es recopilar y sincronizar fasores de PMU distribuidas y otras centrales de nivel inferior para organizar los fasores obtenidos en tiempo real y bases de datos históricas ofreciendo una interfaz de datos estándar para otras funciones.
Análisis y monitoreo dinámico de área amplia
Esta función proporciona varias herramientas básicas que permiten observar la red eléctrica de forma global y dinámica. Estas herramientas corresponden a:
Gráfico. - Analítico que ofrece acceso gráfico de la dinámica del sistema, así como las curvas bidimensionales basadas en el tiempo, diagrama de fasores de coordenadas polares, perfil de voltaje.
Tabla. - estadística presenta información resumida del sistema en hojas de cálculo. El sistema de alerta verifica automáticamente los limites de violación de los límites de operación
Registro y reproducción de perturbaciones sincronizadas
La sincronización se logra naturalmente entre las PMU y la estación central. En segundo lugar, la función está organizada globalmente, lo que significa que:
La acción de grabación puede ser iniciada por eventos o comandos tanto locales como remotos
Se puede implementar un esquema de activación integral con la información global en la estación central;
Los datos registrados se pueden centralizar fácilmente para reconstruir una visión global del evento.
Monitoreo del estado de operación del generador
Es de gran importancia la operación del sistema y la evaluación de la estabilidad relacionada con la operación de los generadores.
Esta función emplea los datos fasoriales medidos dinámicamente y algunos conocimientos previos de los generadores para producir el gráfico "P-Q"
Análisis de oscilación de baja frecuencia en línea
Debido al aumento en gran escala de la red eléctrica la oscilación de energía de baja frecuencia entre áreas se está convirtiendo en un problema en varios sistemas interconectados. Esta función permite realizar una investigación profunda para la detección de oscilación para explorar la dinámica de cantidades sensibles como: flujo de potencia, ángulos de potencia y oscilaciones de potencia. Se emplea un algoritmo para realizar análisis detallados como obtener información detallada de frecuencia, coeficientes de amortiguamiento, generadores o buses relacionados.
Estimación de estado híbrido
Esta función consiste en realizar una combinación de los datos obtenidos de los sincrofasores con las mediciones tradicionales que permite mejorar la velocidad y la precisión de la estimación de estado. Para lograr esto, el algoritmo tradicional se modifica para lograr una estimación de estado híbrida que pueda considerar mediciones de diferentes tipos, precisiones y diferentes tasas de actualización.
Toma de decisiones previas en línea
En base al esquema de control de emergencia, cuando un sistema de energía sufre una falla importante y se enfrenta a condiciones peligrosas, el control de emergencia actúa para deslastrar carga y disparar generadores, con la finalidad de regresar a un punto estable. Debido que este procedimiento debe responder de forma inmediata, se debe preparar un esquema de control detallado con anticipación. Esta función dispone de un tiempo de simulación más rápido que el tiempo real y la evaluación de la estabilidad en línea se realizan en función de los datos de operación proporcionados por el sistema WAMS.
Predicción y alarmas de estabilidad del ángulo de potencia
En WAMS, el ángulo del rotor de los generadores y el ángulo de fase de los voltajes de barra se miden directa y sincrónicamente en lugar de estimarse a partir de otras cantidades. Por lo tanto, en la estación central está disponible una vista global y dinámica de los ángulos de potencia, que presenta medios útiles para comprender el estado del sistema. En esta función, se desarrollan algoritmos avanzados para utilizar datos de ángulo para evaluar y predecir la estabilidad del ángulo del rotor del sistema observado.
Identificación de perturbaciones en línea
Esta función logra la detección, identificación y ubicación en tiempo real de diversas perturbaciones o fallas. Teniendo en cuenta que las PMU no han cubierto todos los nodos, no siempre se puede realizar una identificación y ubicación precisas. En estos casos, se proporcionará una lista de perturbaciones probables y un área aproximada para que los operadores del sistema tomen medidas adicionales. El resultado de esta función también se puede utilizar para activar esquemas de protección especiales.
Monitoreo dinámico de estabilidad de voltaje
WAMS proporciona una imagen completa y en movimiento de los voltajes del sistema. Esto es muy valioso para una estrecha supervisión de los transitorios de tensión. En esta función, se pueden detectar picos y caídas de tensión de barra tanto de corta como de larga duración. Además, la dinámica de voltaje está asociada con la variación del flujo de potencia para implementar algunos índices de estabilidad de voltaje estáticos y dinámicos para dar una indicación de qué tan lejos está el sistema de la inestabilidad de voltaje.
Identificación de modelo/parámetro
La identificación precisa del modelo es esencial para el análisis y control del sistema de potencia. Sin embargo, debido a la enorme cantidad de componentes en el sistema de energía y sus características variables en el tiempo, adquirir el modelo y los parámetros precisos es una tarea extremadamente difícil.
En esta función, se emplean mediciones dinámicas y de área amplia para identificar los modelos y parámetros de generadores, líneas de transmisión, cargas y otros dispositivos en los sistemas de energía. El resultado de esta función se comparó con el obtenido por el equipo de identificación de modelo y parámetro local en el proyecto WAMS de la red eléctrica del noreste de China. [11]
Control automático de voltaje
El objetivo del regulador automático de voltaje es obtener una distribución de VAr óptima entre generadores, compensadores de derivación y otros reguladores mientras se mantienen dentro de los límites permitidos.
En este control automático de voltaje basado en WAMS, el problema de optimización global se resuelve en función de toda la información de los voltajes de los nodos, las generaciones de VAr y los flujos de potencia reactiva. En pequeños intervalos de tiempo el esquema de control se actualiza y luego se envía a los diversos dispositivos de regulación.
COMPORTAMIENTO DE FRECUENCIA EN PRESENCIA DE ENERGÍAS RENOVABLES
Uno de los problemas más preocupantes en el diseño, operación y control de micro redes es el problema de estabilidad debido al desequilibrio en entre generación y carga. En los sistemas eléctricos tradicionales (sistemas basados en generador sincrónico), la inercia y amortiguamiento propio de los generadores sincrónicos presentan un papel importante en la regulación de la estabilidad de la frecuencia durante la contingencia [12].
La relación entre carga, potencia de generación, inercia del sistema y amortiguamiento se define mediante la siguiente ecuación de oscilación

Donde:
ΔPm: Cambio de potencia mecánica del generador sincrónico
ΔPL: Cambio de potencia de carga
Δf: Desviación de la frecuencia del sistema
H: Inercia del sistema
D: Amortiguamiento del sistema
f: Frecuencia del sistema
Para la regulación de frecuencia a un valor nominal frente a una contingencia, existen 3 etapas de regulación principales: regulación de inercia, regulación primaria, y regulación secundaria.
En los últimos años los generadores sincrónicos dentro de las microrredes han sido reemplazados por fuentes de energía renovables basadas en inversor/conversor. En este sentido la respuesta de inercia del sistema y la amortiguación disminuyen significativamente.
Centrándose en la respuesta inercial del sistema, la potencia de inercia almacenada (Energía cinética) en los rotores de los generadores síncronos contrarrestará el desequilibrio a través del control de inercia hasta que el control primario se active por completo, la relación entre inercia de los generadores síncronos y la microrred se determina como [12]:

Donde:
SSG: Potencia nominal del generador sincrónico
SMG: Potencia nominal de la microrred
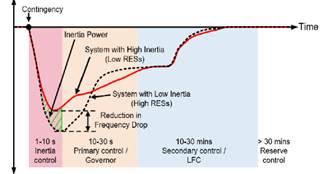
Como consecuencia la tasa de cambio de la frecuencia aumenta lo que se refleja en una mayor caída de la frecuencia, inestabilidades del sistema y en el peor de los casos podría presentar un apagón en cascada. En la Figura 3 se puede apreciar como la caída de la frecuencia es mucho más rápida en presencia de alta penetración de generación renovable con baja inercia, debido a este fenómeno existe la posibilidad que las unidades de control primario y secundario no sean suficientes para contrarrestar la contingencia [12].
IMPLEMENTACIÓN DEL MODELO
En esta sección se detalla la implementación del modelo de una microrred integrada bajo una plataforma RTHIL y el sistema WAMS de CENACE en donde se analiza diferentes escenarios de perturbaciones que afectan a la red y así poder comprobar el comportamiento de los controladores y elementos de la microrred y su aporte a la estabilidad de frecuencia.
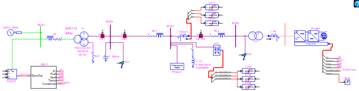
El sistema de la microrred se ha modelado en el software para análisis de transitorios electromagnéticos HYPERSIM el cual también constituye una plataforma de simulación en tiempo real de la marca OPAL-RT. El modelo utilizado consiste en un sistema de generación fotovoltaico con su sistema de control conectado a un alimentador de distribución con cargas activas y reactivas.
El sistema fotovoltaico tiene una potencia nominal de 750 kW y un enlace de 1050 Vdc, el sistema cuenta con un conjunto fotovoltaico, un inductor de acoplamiento, un transformador elevador, un convertidor elevador y un inversor. Está conectado a un sistema de distribución trifásico simplificado de 22,9 kV y 60 Hz. El panel fotovoltaico cuenta con un conjunto fotovoltaico que está conectado a un inversor a través de un convertidor DC-DC.
El modelo antes detallado se muestra en la Figura 4 como un diagrama unifilar en el ambiente de simulación de HYPERSIM y la ubicación de la PMU en el modelo, la cual servirá para realizar el análisis en el sistema WAMS:

Implementación RTHIL
La configuración implementada de la plataforma RTHIL consiste en los siguientes elementos:
Simulador y tarjeta OPAL-RT series 5600.
Amplificador de señal Omicron CMS-156.
PMU- IED SEL RTAC
Antena para posicionamiento global (GPS)
Sistema WAMS
Ordenador personal (PC) para análisis e interfaz hombre- maquina.
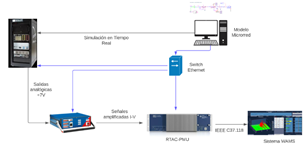
Para conectar la PMU- IED RTAC con las salidas analógicas de OPAL-RT se necesita realizar una etapa de amplificación para aumentar las señales analógicas a los niveles requeridos por el IED en este contexto se utiliza un amplificador de señales de marca Omicron que permite elevar las señales de bajo nivel DE +/- 7 V a una tensión de hasta 120V y una corriente de hasta 1 A.
Una vez realizada la etapa de amplificación estas señales se conectan al PMU y esta a su vez es sincronizada en tiempo mediante un GPS quien coordinara un tiempo para estampar los valores estimados. Finalmente, los datos son enviados mediante el protocolo IEEE C37.118 al sistema WAMS de CENACE.
Para la implementación de esta arquitectura es necesario realizar el re-escalado de las entradas de la PMU para que el nivel de la señal enviada sea la misma que la del modelo de simulación, adicionalmente se ajustan manualmente limitadores dentro de la simulación para evitar sobrevoltajes o sobre corrientes dentro de la etapa de amplificación.
La validación de las magnitudes fasoriales durante el estado estacionario y el estado dinámico se logró mediante la comparación de las señales dentro de una ventana de tiempo tanto en la simulación como en el sistema WAMS.
En la Figura 5 se muestra la arquitectura RTHIL utilizada para la simulación de la microrred:
Integración con el sistema WAMS de CENACE
Con base a la implementación e integración del modelo de simulación en tiempo real con el equipo PMU- IED RTAC, se realiza él envió de datos sincrofasoriales con un muestreo de 60 muestras por segundo mediante el protocolo de comunicaciones IEEE C37.118 al concentrador de datos sincrofasoriales (PDC), el cual permite utilizar las aplicaciones WAMS y la interfaz gráfica WAProtector.
La interfaz gráfica del sistema WAMS permite observar en tiempo real las variables eléctricas enviadas desde el modelo de la microrred mediante gráficos en función del tiempo o gráficos polares.
La metodología propuesta basada en RTHIL utiliza el modelo de la microrred antes detalla y que ha sido simulada en el software HYPERSIM para procesar todas las medidas que serán parte de la entrada al sistema WAMS de tiempo real. En consecuencia, otros datos como las magnitudes fasoriales, ángulos de potencia, consumos de potencia activa/reactiva, frecuencia y desviación de frecuencia se estiman.
Conforme [13], se diseña un diagrama de flujo operativo para representar la secuencia de las funciones requeridas y la integración de los componentes de software y hardware como indica la Figura 6.
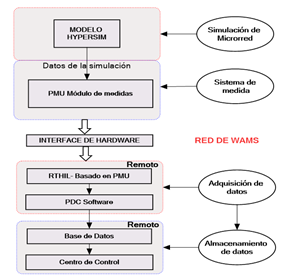
La microrred modelada proporciona los datos necesarios para las PMU basadas en RTHIL a través del sistema de adquisición de datos de la interfaz de hardware. A continuación, los datos procesados se adquieren utilizando el concentrador de datos fasoriales (PDC). Finalmente, los datos entregados se almacenan y analizan, esto sirve para supervisar el estado de la red mediante WAMS y tomar la decisión de control adecuado.
Uso de módulo de detección de rangos de WAProtector
Una vez que se cuenta con la información en tiempo real del modelo de microrred dentro del sistema WAMS, se implementa una herramienta de análisis disponible dentro del software WAProtector. El modulo que se aplicará para el presente trabajo es el detector de dos deltas que se utiliza para la detección de dos cambios sucesivos del valor de control en la misma dirección como se muestra en la Fig. 7:
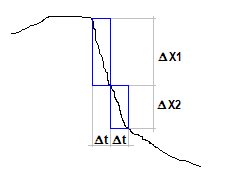
La señal de entrada al módulo es la señal de frecuencia de la barra 3, si esta señal sufre un cambio de valor superior a un límite delta dentro de una ventana de tiempo definida, se activará la primera alerta dentro de la cual se podrá realizar alguna acción de control. Si el desvío de valor persiste, el evento es monitoreado dentro de la misma ventana de tiempo y si excede el valor del límite delta 2 se activa la alarma para que el operador tome las acciones correspondientes ante la posibilidad de un colapso de la red por baja o sobre frecuencia.
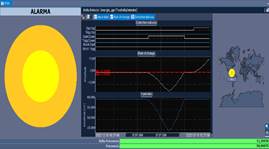
En la Figura 8 se muestra la implementación de esta herramienta dentro de la interfaz gráfica de WAProtector donde el operador puede observar el comportamiento dinámico de las variables de frecuencia, desviación de frecuencia y la activación de las alertas y alarmas para cada rango definido.
Coherencia entre la Respuesta de Simulación y la Respuesta de Monitoreo WAMS
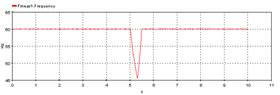
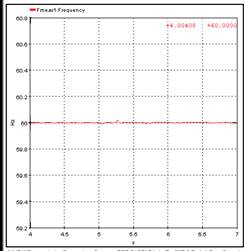
Para verificar que las señales obtenidas mediante simulación y las estimadas por la PMU que es monitoreada por el sistema WAMS mantienen concordancia en sus respuestas, se ha propuesto un evento de desconexión de la red de distribución en el tiempo de 5 segundos y posterior reconexión a los 5.3 segundos. La respuesta obtenida como resultado del evento tanto en HYPERSIM como en WAPROTECTOR se presentan en: Figura 9 y Figura 10 respectivamente.

Se extrajeron los datos de simulacion y monitoreo del evento, para la tabulación y comparación. Es necesario considerar que el paso de muestreo deben coincidir para poder realizar el análisis.
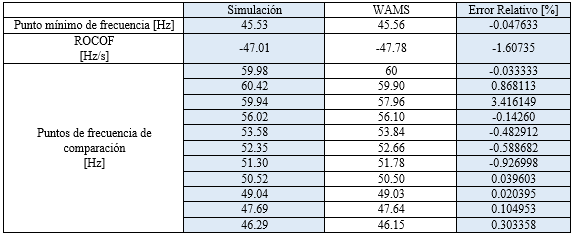
Para fines del presente artículo resulta necesario conocer la respuesta de frecuencia que interviene en el calculo del ROCOF. En la Figura 11 se presenta las señales de análisis: en azul la respuesta del simulador y en rojo la respuesta del sistema WAMS.
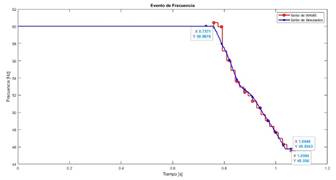
En la Tabla 1 se muestra un conjunto de valores que ayudan a conocer el error presente entre la simulación y los estimados por la PMU que es monitoreada por el sistema WAMS. Tabla que permite observar que el error relativo es muy pequeño, dando fiabilidad a la implementación.
RESULTADOS
La implementación de HIL se realiza considerando un sistema fotovoltaico conectado a la red eléctrica la cual alimenta una carga. El dispositivo físico conectado a la a simulación es una PMU que se ubica en la barra 3, equipo que estima los fasores de voltaje y corriente a partir de datos obtenidos de la simulación en tiempo real y los envía al sistema WAMS como se muestra en la Figura 12.
Salida del sistema fotovoltaico
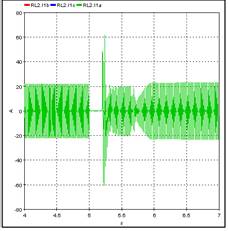
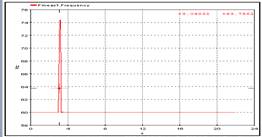
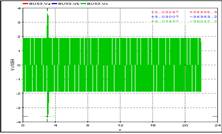
Para simular la salida del sistema fotovoltaico se realiza un evento en el disyuntor CB M2 con desconexión a los 5s y una reconexión a los 5.2s En la Figura 13 se puede observar los resultados obtenidos en el sistema WAMS de frecuencia, voltaje y corriente frente a un evento de salida de generación distribuida

En las Figs. 14, 15 y 16 se puede observar los resultados de frecuencia, voltaje y corriente respectivamente obtenidos de HYPERSIM, en este software se observan las señales en función del tiempo, mientras que en WAMS se las observa con sus valores RMS, considerando estas características se puede identificar la similitud entre simulación y datos obtenidos por la PMU física integrada al WAMS.

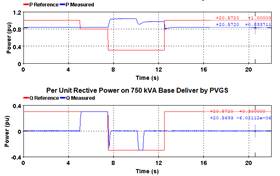
Variación de parámetros del sistema fotovoltaico
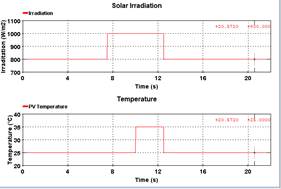
Para simular este evento se plantean variaciones de referencia de potencia activa y reactiva tal como se muestra en la Figura 17, además de variaciones de temperatura e irradiación observadas en la Figura 18, estos eventos afectan directamente a la generación fotovoltaica. De igual manera que el caso anterior se puede encontrar la similitud entre los resultados obtenidos mediante la PMU física y las simulaciones de HYPERSIM como se muestran en las Figs. Figura 19, Figura 20, Figura 21 y Figura 22.

Aporte del sistema fotovoltaico ante un evento de frecuencia
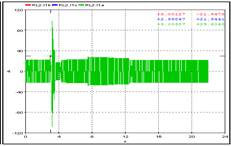
Con el fin de analizar la respuesta del sistema fotovoltaico específicamente del convertidor elevador y del inversor ante un evento de frecuencia, dentro de la simulación se realiza un evento de desconexión de carga (10 MW, 1 Mvar) en el bus 3. Ante este evento se puede observar las variables de frecuencia y la respuesta del sistema fotovoltaico en la Figura 23 y Figura 24.
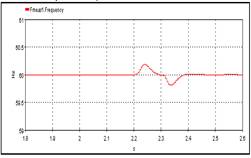
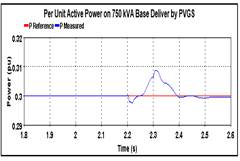
Como se puede apreciar el sistema fotovoltaico se encuentra generando en condiciones estacionarias una potencia base de 0.225 MW una vez que ocurre el evento de desconexión de carga la potencia entregada por el sistema baja a 0.2175 MW conforme los tiempos detallados en la Tabla 2, aportando en parte a la estabilidad de frecuencia.

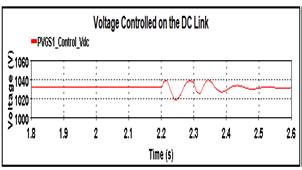
Se denota, además, que el mayor aporte del inversor lo realiza para mantener el voltaje en el punto común de acoplamiento conforme la Figura 25. Esto sucede debido a las características del inversor seleccionado para el modelo.
CONCLUSIONES Y RECOMENDACIONES
Este articulo resume una metodología para la implementación y desarrollo de una simulación en tiempo real mediante la arquitectura Hardware In The Loop para una microrred. El objetivo principal de esta implementación es destacar el uso de las últimas tecnologías, el diseño y nuevos métodos utilizados para pruebas de elementos físicos de control y protección para aplicaciones en microrredes. Pudiendo de esta forma realizar diferentes escenarios de estudio dentro del modelo como se realizó en el presente trabajo para analizar los fenómenos de estabilidad de frecuencia mediante el sistema WAMS.
El enfoque metodológico de la simulación en tiempo real Hardware In The Loop se justifica dado que da un valor agregado en las pruebas avanzadas de los sistemas de energía, además la alta complejidad en realizar un estudio de una microrred integrando un sistema de tiempo real permite disponer de mejores posibilidad para el diseño de esquemas de protección y control, así como puede permitir realizar una mejor planificación a la hora de ingresar generación no convencional intermitente dentro de los sistemas de distribución.
Se recomienda el uso de esta metodología para realizar el estudio de planificación y esquemas de control y protección ante la inclusión de generación distribuida, de esta forma se podrán probar la actuación y consecuencias de la implementación de los equipos físicos dentro de un ambiente de pruebas controlado.
Fortalecer la integración entre software y hardware permitirá explotar las herramientas que dispone WAMS, así como la evaluación del ingreso de equipos físicos sin necesidad de instalarlos en sitio.

