











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
En la última década, el sector eléctrico ha sufrido un crecimiento significativo de la demanda debido, principalmente, al rol estratégico que tiene en el desarrollo de la matriz productiva y energética del Ecuador. Es por esto que el Sistema Nacional Interconectado (S.N.I) se ha expandido con el fin de garantizar el abastecimiento de energía con criterios de calidad y soberanía, priorizando recursos primarios locales y energía renovable [1].
Fruto del crecimiento de la demanda, diversificación de las fuentes primarias, interconexiones regionales, de la expansión de la transmisión, de las fluctuaciones de generación, entre otros, los sistemas eléctricos operan cada vez más cerca de sus límites de estabilidad. En este sentido, para lograr una adecuada planificación y operación es necesario realizar estudios cada vez más complejos y precisos [2] [3].
Para realizar dichos estudios, y dependiendo del fenómeno eléctrico a analizar, varios programas son utilizados. Por ejemplo: ETAP, PowerFactory, Simulink, PowerWorld, EMTP-ATP, aparecen entre los más comunes. Sin embargo, a pesar de su utilidad en las etapas de planificación y estudios eléctricos, estos programas presentan limitantes para evaluar el rendimiento de equipos del tipo hardware-in-the-loop (HIL) ya que no pueden realizar la simulación en sincronismo con el fenómeno eléctrico real [4].
Como solución a lo precitado, desde hace un par de décadas se han visto en el mercado simuladores digitales en tiempo real con características HIL que permiten simular fenómenos eléctricos en el mismo tiempo que suceden en situaciones reales. Esta tecnología presenta varias ventajas como evaluar el rendimiento de unidades de medición fasorial (PMUs), relés de protección, reguladores automáticos de voltaje (AVRs), estabilizadores de sistema de potencia (PSSs), gobernadores, u otros equipos eléctricos. Además, se pueden realizar estudios complejos en tiempo real utilizando simulaciones de transitorios electromecánicos (RMS) y/o transitorios electromagnéticos (EMT), incluyendo varios elementos de una red y sus respectivos sistemas de control, lo cual representa una ventaja significativa respecto a los modelos generador - barra infinita usualmente utilizados para este propósito [4] [5].
Basándose en estas ventajas, CENACE ha implementado un laboratorio de simulación en tiempo real de sistemas eléctricos de potencia, el cual tiene como elemento principal a un simulador digital en tiempo real (RTDS), por sus siglas en inglés, de la empresa OPAL-RT [4] [6]. Este dispositivo dispone de cuatro herramientas computacionales para simulación que son utilizadas en función del tamaño del sistema (número de nodos) y de la frecuencia del fenómeno eléctrico a estudiar. Específicamente, en este trabajo, el software HYPERsim destinado para realizar análisis de EMT en sistemas de potencia de gran escala y con pasos de tiempo de 10 a 100 µs es utilizado [7].
Por otro lado, es evidente que el punto primordial para realizar estudios dinámicos en el RTDS se basa en una adecuada representación del sistema eléctrico y sus correspondientes sistemas de control, los cuales deben ser validados frente a un modelo patrón o al comportamiento real del sistema eléctrico.
En este contexto, el presente trabajo muestra una metodología para la modelación dinámica del Sistema Nacional Interconectado (S.N.I) del Ecuador en HYPERsim, incluyendo líneas de transmisión (LTs) de 500, 230 y 138 kV, transformadores, reactores, capacitores, cargas, generadores, sistemas de control, entre otros. Adicionalmente, utilizando este modelo construido en HYPERsim, se presenta un análisis de transitorios electromecánicos y electromagnéticos, considerando como caso de estudio la energización del corredor Chorrillos - Tisaleo - El Inga en 500 kV. Las simulaciones realizadas consideran dos técnicas comunes para energización de líneas de transmisión: mando sincronizado y resistencias de pre-inserción.
En cuanto a la modelación de LTs, la literatura muestra algunos modelos aplicables para este fin. De forma general, estos modelos se dividen principalmente en dos grupos: parámetros concentrados y distribuidos [8]. A su vez, dentro del grupo de parámetros concentrados están el modelo π y su variación π en cascada, ampliamente utilizados en análisis de estado estacionario [9]. Por otro lado, los modelos de parámetros distribuidos son de gran utilidad para el análisis de fenómenos basados en ondas viajeras (sobrevoltajes de maniobra y descargas atmosféricas). Dentro de este grupo aparecen los modelos de parámetros constantes (CP) y parámetros dependientes de la frecuencia (FD) [9] [10]. La Fig. 1 muestra a detalle la clasificación de los modelos existentes para modelación de LTs según [9]. En este documento, se han utilizado en su mayoría, modelos CP construidos a partir de datos de geometría de torre y tipo de conductor. La metodología de validación de los modelos de LT se detalla en las secciones posteriores.
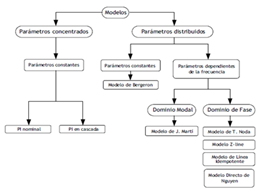
Figura 1: Clasificación de modelos de LTs para análisis de estado estacionario y fenómenos basados en ondas viajeras.
La representación de los restantes elementos eléctricos de potencia que conforman el S.N.I. utiliza modelos estándar ampliamente conocidos en ingeniería eléctrica y detallados en [2] [3]. En la etapa de generación, este trabajo incluyó los modelos eléctricos de generadores sincrónicos y sistemas de control, conjunto AVR y PSS, de las centrales hidroeléctricas Coca Codo Sinclair y Sopladora debidamente validos por CENACE en pruebas de campo. El resto de centrales de generación fueron modeladas como equivalentes Thevenin, incluyendo su potencia de corto circuito y su relación X/R necesario en estudios RMS.
El resto del documento se estructura de la siguiente manera: la sección II brinda una breve explicación de los tipos de transitorios en sistemas eléctricos de potencia (SEP), mientras que la sección III desarrolla la metodología secuencial de modelación y validación de elementos del S.N.I. en estado estacionario. La sección IV detalla la metodología de validación del S.N.I en estado dinámico; la sección V muestra los resultados obtenidos de una primera aplicación del modelo desarrollado y la sección VI presenta las conclusiones de este trabajo.
TRANSITORIOS EN SISTEMAS ELECTRICOS DE POTENCIA
El termino transitorio hace referencia a un evento de corta duración, generalmente menor a un ciclo de la frecuencia fundamental del SEP (50 o 60 Hz), en el cual la onda sinusoidal de voltaje o corriente se distorsiona debido a cambios abruptos en el sistema como: fallas, variaciones de cargas grandes o maniobras operativas [5] [11]. Esto conduce a que el SEP pase de su estado estacionario a un nuevo estado, además de aumentos súbitos de energía [12]. Los transitorios se clasifican en electromagnéticos y electromecánicos.
Transitorios Electromecánicos (EMS)
Los EMS asumen perturbaciones de baja frecuencia ocasionadas por un desfase entre la etapa de generación de energía y la carga. Lo que involucra oscilaciones en los rotores de los generadores sincrónicos, así como también desbalances entre los torques eléctricos de turbinas y generadores [5] [13].
Convencionalmente, para su resolución se emplea la aproximación de red de secuencia positiva donde se asume que el SEP bajo análisis permanece en un estado cuasi estacionario y se aplican ecuaciones diferenciales en el dominio del tiempo para hallar las variables de las unidades de generación (maquinas sincrónicas o asíncronas) [14] [15]. Este tipo de análisis son conocidos como estudios de estabilidad.
Transitorios Electromagnéticos (EMT)
Los EMT se generan a partir de la interacción entre la energía almacenada en capacitores e inductores del SEP [6]. Estos fenómenos son iniciados por cambios en la topología del sistema, es decir, por apertura o cierre de interruptores u otros dispositivos eléctricos, fallas y descargas atmosféricas [15].
Adicionalmente, la frecuencia de acción de este tipo de transitorios está en el orden de los kHz y MHz, es decir transitorios de frente rápido o muy rápido [6]. Su área de propagación afecta principalmente a líneas de transmisión, cables, transformadores y equipos de protección que son afectados por sobrevoltajes de frente rápido y muy rápido [11]. En la Fig. 2 se resumen los rangos de frecuencia para transitorios de tipo EMS y EMT [15].

METODOLOGÍA PROPUESTA PARA LA MODELACIÓN Y VALIDACIÓN DEL S.N.I EN ESTADO ESTACIONARIO
Para un correcto análisis de los eventos descritos en II, una modelación detallada del SEP se vuelve indispensable. En este sentido, CENACE cuenta con una base de datos validada del S.N.I. en PowerFactory de DIgSILENT que es usada para actividades de planificación y despacho. La cual es utilizada por la metodología como sistema de referencia para la validación del S.N.I. en estado estacionario.
Modelación y validación de equipos del S.N.I
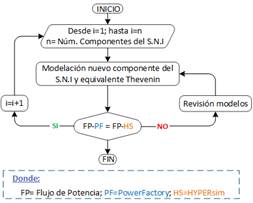
La modelación y validación de cada elemento del S.N.I en HYPERsim se la realiza de acuerdo al siguiente método propuesto. Se empieza por modelar un generador (fuente ideal o un equivalente Thevenin), un transformador y un equivalente Thevenin (ETh) en el final del circuito que representa el resto del sistema eléctrico; este pequeño diagrama se valida corriendo un flujo de potencia en HYPERsim y PowerFactory. Si los resultados obtenidos (voltaje, ángulo, potencia activa y reactiva en las barras) son los mismos, entonces se dice que el circuito está validado en estado estacionario.
Una vez validado el primer sistema, se retira el equivalente Eth, se añade al modelo un nuevo elemento del S.N.I. y se coloca otro equivalente Eth al final del nuevo elemento modelado. De igual manera, se valida este sistema comparando los flujos de potencia entre HYPERsim y PowerFactory. Este proceso se realiza desde el elemento i=1 hasta el último elemento del S.N.I. i=n, tal como se muestra en la Fig. 3. Así, se obtiene el modelo completo del S.N.I. validado en estado estacionario mediante flujos de potencia.
Modelación y validación de líneas de transmisión
Los modelos eléctricos que representan el funcionamiento de una línea de transmisión se calculan a partir de la geometría de las torres y de las características de los conductores [9] [16].
Además, HYPERsim utiliza el modelo de parámetros constantes (CP), diferenciando modelos para LT transpuestas y no traspuestas, y el modelo de parámetros dependientes de la frecuencia (FD) [7] [9]. En este trabajo se utilizan, en su mayoría, modelos CP para la modelación de LTs debido a que HYPERsim cuenta con una herramienta que permite su cálculo y del modelo 𝜋.
Los parámetros de un modelo 𝜋 son de secuencia positiva y cero, tal como se muestra en
(1).

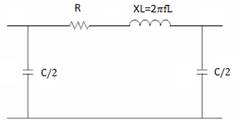
Donde R, L, C corresponden a resistencia, inductancia y capacitancia, respectivamente. Mientras que, los subíndices “1” y “0” representan a los valores de secuencia positiva y negativa. En la Fig. 4 se sintetiza la representación 𝜋 de una LT.
De igual forma, la geometría de las torres, la resistividad del suelo, el vano, la distancia entre fases o la distancia entre fases e hilos de guarda, entre otros, varían a lo largo de una LT. Por este motivo, al calcular el modelo CP de una línea con una geometría de torre estándar se puede incurrir en errores.
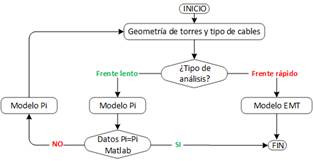
En relación a lo antes expuesto, se propone una metodología de validación de modelos de LT en HYPERsim, en la cual los datos ingresados son previamente validados en Matlab y PowerFactory de DIgSILENT.
Primero, utilizando un script de programación en Matlab y datos estándar de geometría de torres y tipo de conductores se calcula el modelo 𝜋 o EMT de la LT, dependiendo del análisis a realizar. Después, se comparan los resultados obtenidos con los modelos de referencia de la base de datos en PowerFactory; si los modelos coinciden con un error aceptable, los datos de geometría de torre y características de conductores son ingresados en la herramienta de cálculo de HYPERsim y se obtiene el modelo CP. Este modelo se asigna a la correspondiente LT en el diagrama del S.N.I. construido en HYPERsim.
Por el contrario, si el modelo 𝜋 calculado en Matlab y el de referencia no coinciden, se realiza un proceso de optimización no lineal multivariable en Matlab, donde la función objetivo pretende minimizar el error entre los parámetros 𝜋 calculados en Matlab y los de referencia de PowerFactory. En (2) se detalla la función objetivo aplicada.

Donde el subíndice “r” corresponde a los parámetros de referencia de PowerFactory y “c” a los parámetros calculados en Matlab; los paréntesis Param (fila, columna) representan todos los valores de fila o columna y las constantes K1 y K0 son pesos asignados a los valores de secuencia positiva y cero, respectivamente. Adicionalmente, K1 y K0 podrían tomar valores de 1, sin embargo, se encontró mejores resultados con valores entre 1.000 y 10.000. En condiciones normales, K1 debe ser igual a K0, K1=K0; no obstante, en ciertas LT del S.N.I. se logra minimizar el error de los parámetros de secuencia positiva pero no los de secuencia cero, en ese caso, se recomienda que K1 sea mayor a K0 dentro de los límites establecidos en (3). Los pasos descritos se resumen en el flujograma de la Fig. 5.

METODOLOGÍA PROPUESTA PARA LA MODELACIÓN Y VALIDACIÓN DEL S.N.I EN ESTADO DINÁMICO
En esta sección, se busca replicar y validar el comportamiento real del grupo generador - AVR - PSS utilizando un modelo eléctrico dinámico.
Para ello, se realizan diferentes ensayos donde se evalúa la respuesta del grupo generador - AVR - PSS al ingresar un pulso en el voltaje de referencia de hasta 5% del voltaje terminal de la máquina. Estas pruebas se realizan en vacío y con diferentes potencias de generación. Con estos ensayos se realiza un proceso de identificación paramétrica y se obtienen modelos dinámicos validados del tipo generador - barra infinita.
En este sentido, actualmente CENACE y CELEC EP cuentan con modelos dinámicos validados para las centrales hidroeléctricas Coca Codo Sinclair (CCS) y Sopladora, con modelos del tipo generador - barra infinita.
Es así que para validar el S.N.I. en HYPERsim de forma dinámica se ingresan estos modelos validados, incluyendo sus sistemas de control, AVR y PSS. Luego, se realizan las pruebas de pulso en el voltaje de referencia (Vref) del AVR para cada central. Si el S.N.I. está correctamente modelado, entonces la respuesta generadora - S.N.I. debe ser muy similar a la respuesta generador - barra infinita. Los ensayos son los siguientes:
Encontrar la potencia de oscilación de CCS con el PSS desactivado, ingresando un pulso en el Vref del AVR de 5% del voltaje terminal (Vt). La potencia de oscilación debe ser igual entre los sistemas generador - barra infinita y generador -S.N.I.
Activado el PSS de CCS y entregando su potencia máxima, 1500 MW, dar un pulso en el Vref del AVR de 5% del Vt; comparar la respuesta del voltaje de campo (Vf) y la potencia eléctrica entregada (Pe), entre los sistemas generador - barra infinita y generador -S.N.I.
En Sopladora, entregando una potencia de 477 MW, dar un pulso en el Vref del AVR de 5% del Vt, con y sin PSS; comparar la respuesta del Vf y la Pe, entre los sistemas generador - barra infinita y generador -S.N.I.
RESULTADOS
Optimización de Líneas de Transmisión
En este apartado se presenta un ejemplo de cómo la metodología de validación de LT, específicamente el proceso de optimización, permite encontrar valores de las variables independientes que se ajusten a los parámetros de referencia del modelo 𝜋.
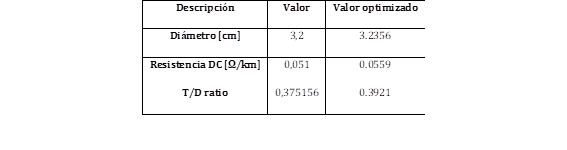
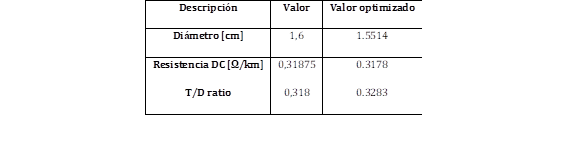
Como ejemplo se toma la LT Santo Domingo - Santa Rosa, con las siguientes características: voltaje de 230 kV, distancia de 78.34 km, 6 conductores de fase tipo “Bluejay 1113”, 1 hilo de guarda tipo “OPWG” y geometría estándar para su torre. Las características estándar de los conductores “Bluejay 1113” y “OPWG” se detallan en la Table 1 y Tabla 2, respectivamente.
Los parámetros de referencia del modelo 𝜋 de esta línea se detallan a continuación, en el mismo orden de (1):

Con los datos definidos anteriormente y con una resistividad del suelo de 116 Ω/m se calcula el modelo 𝜋 en Matlab; los resultados son los siguientes:

El error, en porcentaje, entre los datos de referencia y los datos calculados se presentan a continuación:

El error total es de 15,3%, donde el principal valor de error está en la resistencia de secuencia positiva, 8,07%. Dado que el error es significativo, se inicia un proceso de optimización de acuerdo a la metodología definida en III. Las variables independientes (características de conductores, geometría de torre y resistividad del suelo) resultantes del proceso de optimización se presentan en la tercera columna de las Tablas 1 y 2. Es importante destacar que el valor que más varia es la resistencia DC del conductor “Bluejay 1113” y por ende es al cual se le dio un límite de +15% para la optimización. Además, la resistividad del suelo se mantiene en 116 Ω/m. Los parámetros del modelo 𝜋 obtenidos con los datos de entrada optimizados son:

Con un error en relación a los parámetros de referencia, en porcentaje, de:

Al minimizar el error se concluye que los parámetros del modelo 𝜋 obtenidos a partir de los datos de entrada optimizados son adecuados y están validados. Como resultado, estos datos son ingresados en HYPERsim para calcular el modelo CP de la LT Santo Domingo - Santa Rosa.
Validación del S.N.I. en HYPERsim en estado estacionario
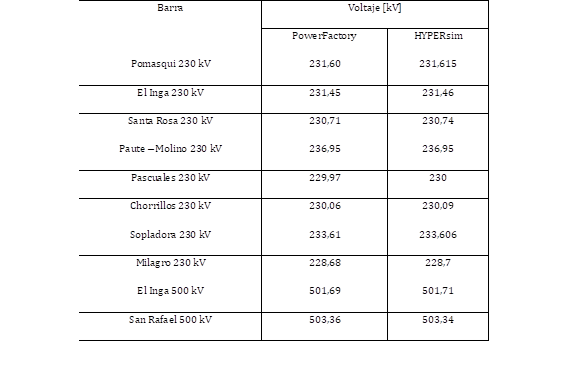
De acuerdo a lo detallado en la sección III, la metodología de validación en estado estacionario se basa en comparar los flujos de potencia (FP) entre PowerFactory, sistema de referencia, y HYPERsim.
En la Tabla 3 se resumen los voltajes de varias barras del S.N.I. obtenidos a partir del cálculo de flujos de potencia en los dos programas y utilizando los datos optimizados en HYPERsim. Los resultados obtenidos tienen un 99.9% de coincidencia en la mayoría de barras del S.N.I.
Validación del S.N.I. en HYPERsim en estado dinámico
Para validar el S.N.I. en estado dinámico, de acuerdo a lo detallado en la sección IV, es necesario modelar el grupo Generador - AVR - PSS en HYPERsim. En las Fig. 6 y Fig.7 se muestra el modelamiento de CCS y Sopladora integrados al S.N.I., respectivamente. En las figuras, los símbolos “SM” corresponden a generadores sincrónicos, mientras que los símbolos “AVR_PSS” son los sistemas de control construidos en Simulink e importados a HYPERsim.
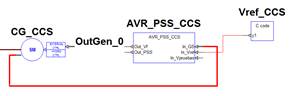
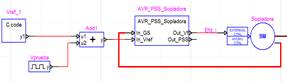
Es importante destacar que no es necesario inicializar las variables de estado de las funciones de transferencia de los sistemas de control ya que HYPERsim lo hace automáticamente al ejecutar las condiciones iniciales del flujo de potencia. A manera de ejemplo, la Fig. 8 muestra el AVR y PSS de CCS construido en Simulink. Por el contrario, el Vref si debe ser inicializado en HYPERsim y se lo hace mediante un programador en código C llamado “C Code”.
Validación dinámica CCS sin PSS
La potencia de oscilación de CCS sin PSS es cercana a los 1000 MW; en la Fig. 9 aparece la respuesta de la potencia eléctrica (Pe) de CCS, ante un pulso en el Vref de 5% del Vt, con un periodo de 50 segundos, un ciclo de trabajo de 50% y entregando 900 MW. La Fig. 9a muestra la oscilación de referencia con generador - barra infinita y la Fig. 9b la respuesta de HYPERsim con generador - S.N.I. Se observa que los sistemas oscilan con magnitud ligeramente diferente, pero su amortiguamiento es positivo, lo que permite concluir que tienen una respuesta bastante similar ante la misma perturbación.
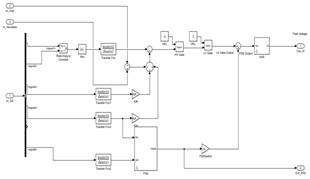
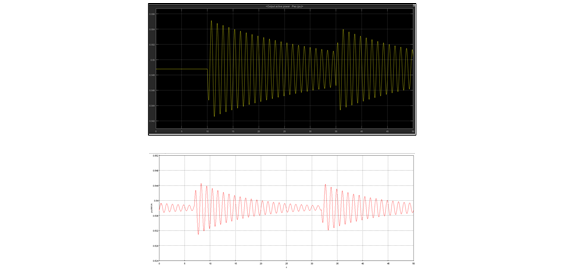
Figura 9: Oscilación de la Pe de CCS ante un pulso en el Vref a 900 MW, sin PSS; a) Generador - barra infinita, b) Generador - S.N.I.
Validación dinámica CCS con PSS
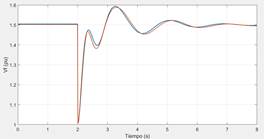
Al activar el PSS y generando 1.500 MW, se compara la respuesta de Vf y Pe entre los sistemas generador - barra infinita y generador - S.N.I. Esta comparación se muestra en las Fig. 10 y Fig. 11, respectivamente. Las líneas de color azul son el sistema de referencia y las líneas de color rojo son el resultado en HYPERsim. Se observa claramente que la respuesta es muy similar, lo que permite concluir, hasta cierto punto, que la modelación del S.N.I. es correcta.
Validación dinámica de Sopladora sin PSS
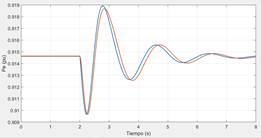
Las Fig. 12 y Fig. 13 muestran el comportamiento del Vf y Pe para la central Sopladora con una potencia de generación de 477 MW y con el PSS desactivado. Aquí, se siguen utilizando los sistemas: generador - barra infinita (referencia) y generador - S.N.I (caso de estudio).
Validación dinámica de Sopladora con PSS
En las Fig. 14 y Fig. 15 se muestra la respuesta de la central Sopladora con las mismas condiciones de operaciones y PSS activado. La respuesta de la central integrada al S.N.I. es muy similar al sistema de barra infinita, su tendencia es la misma, aunque su amplitud y fase es ligeramente diferente; esto se debe a que al realizar las pruebas en Sopladora se encuentran activados los sistemas de control de CCS, y al ser CCS el generador más grande del S.N.I., aporta a las oscilaciones o al amortiguamiento de Sopladora.
Energización del corredor de transmisión El Inga-Tisaleo-Chorrillos 500 kV del S.N.I.
El análisis de transitorios electromagnéticos durante la energización del corredor de transmisión El Inga-Tisaleo-Chorrillos 500 kV del S.N.I ha sido escogido como ejemplo práctico para mostrar la importancia de las metodologías de modelación y validación en HYPERsim propuestas en este trabajo técnico.
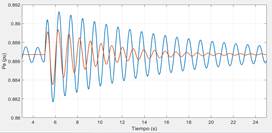
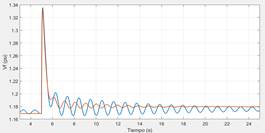
Figura 13: Respuesta de la Pe de Sopladora entre sistemas de generador - barra infinita y generador - S.N.I., con PSS desactivado
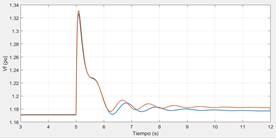
Figura 14: Respuesta del Vf de Sopladora entre sistemas de generador - barra infinita y generador - S.N.I., con PSS activado
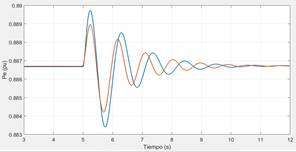
Figura 15: Respuesta de la Pe de Sopladora entre sistemas de generador - barra infinita y generador - S.N.I., con PSS activado
Para este fin, se emplearon dos técnicas de energización de LTs de extra alto voltaje como son: mando sincronizado y resistencia de pre-inserción. De igual forma, se definió a la subestación (SE) Chorillos como el punto de inicio en la secuencia de energización, seguida de la SE Tisaleo, y finalmente el punto de sincronización en la SE El Inga debido a su cercanía con la Central CCS.
Para las simulaciones realizadas, se consideraron como valores máximos de sobrevoltaje los propuestos en [17], donde los valores limites están alrededor de 1,2 a 1,8 p.u. durante la energización de líneas de transmisión y transformadores.
Energización con mando sincronizado
Esta técnica se basa en el cierre de interruptores en puntos específicos de la onda de voltaje, usualmente durante el cruce por cero, para atenuar el impacto de la maniobra y extender la vida útil de los equipos [18]. En este sentido, interruptores con mando sincronizado fueron simulados en las barras de las SEs Chorrillos, Tisaleo y El Inga.
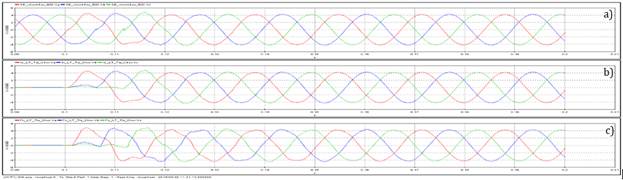
La Fig. 16 indica los resultados en HYPERsim, luego de cerrar la posición Tisaleo en la subestación Chorrillos 500 kV cruzando por cero. La secuencia de cierre controlado fue la siguiente: ABC, con tiempos de cierre, 0,100675 s para la fase “A”, 0,106205 s para la fase “B” y 0,111735 s para la fase “C”. Específicamente, la Fig. 16a corresponde a las ondas de voltaje en la barra de Chorillos, la Fig. 16b las ondas de voltaje en el inicio de la LT Tisaleo-Chorrillos y la Fig. 16c el voltaje en el final de esta línea.
Energización con resistencia de pre-inserción
En este escenario, se modelaron interruptores con resistencia de pre-inserción en las SEs Chorrillos y El Inga. Esta técnica se fundamenta en conectar resistencias en serie con los interruptores principales. Luego, estas resistencias son aisladas utilizando un interruptor conectado en paralelo que garantiza la continua energización de la línea de transmisión. De esta forma, se asegura tener una carga baja en la línea y, por consiguiente, que la sobretensión en el cierre o recierre se reduzca [17]. Las resistencias modeladas son de 400 ohmios y tienen un tiempo de operación de 8 ms.
Al igual que en el caso anterior, en la Fig. 17 se muestran los resultados en HYPERsim luego de cerrar la posición Tisaleo en la subestación Chorillos, pero esta vez con la técnica de resistencia de pre-inserción. En esta simulación, el interruptor principal conectado a la resistencia actúa a los 0,100675 s, mientras que el interruptor auxiliar a los 0,108675 s.
Claramente se observa como los picos de voltaje en el inicio y el final de la LT bajo estudio se ven atenuados a valores ligeramente menores que 400 kV, mientras que el caso anterior estos picos superaban este valor durante la maniobra de energización.
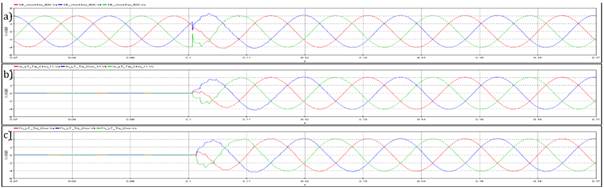
Figura 17: Resultado del cierre de la posición Tisaleo en HYPERsim con resistencia de pre-inserción; a) Barra Chorrillos 500 kV; b) Inicio LT Tisaleo-Chorrillos 500 kV; c) Final LT Tisaleo-Chorrillos 500 kV
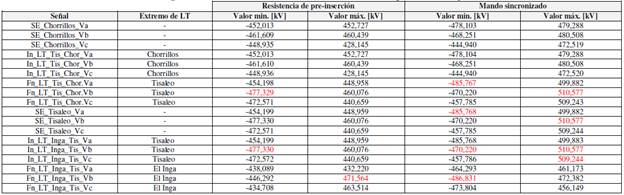
La Tabla 4 contiene los valores de voltaje obtenidos de las simulaciones en HYPERsim para todo el corredor de transmisión analizado. Los valores resaltados en color rojo muestras los máximos, positivos y negativos, alcanzados para las dos técnicas de energización aplicadas.
De estos resultados, y para el caso de energización con resistencias de pre-inserción, se tiene que la LT El Inga - Tisaleo podría alcanzar un valor máximo de voltaje igual a 1,1551 p.u. verificado en el extremo de línea que llega a la SE Tisaleo y un valor máximo negativo de -1,1692 p.u. verificado en el extremo de línea que llega a la SE El Inga. Mientras que, para la línea de transmisión Tisaleo - Chorrillos se tiene un valor máximo de 1,1278 p.u. y un valor máximo negativo igual a -1,1692 p.u. verificado en el extremo de línea que llega a la SE Tisaleo.
Por otra parte, y al usar la técnica de mando sincronizado, se tiene que la LT El Inga - Tisaleo el valor máximo de su onda de voltaje es 1,2506 p.u. verificado en el extremo de línea que llega a la SE Tisaleo y el valor máximo negativo es de -1,1924 p.u. verificado en el extremo de línea que llega a la SE El Inga. Mientras que, para la línea de transmisión Tisaleo - Chorrillos se tiene un valor máximo de 1,2506 p.u. y un valor máximo negativo igual a -1,1898 p.u. verificado en el extremo de línea que llega a la SE Tisaleo.
En ambos casos analizados, se confirma una disminución en los valores de sobrevoltaje alcanzados al utilizar interruptores con resistencia de pre-inserción. Por ejemplo, los valores positivos y negativos de la LT El Inga-Tisaleo se reducen en 7,63% y 1,95%, respectivamente. Para la LT Tisaleo - Chorrillos los valores se alcanza una de reducción de 9,82% y 1,73% en los sobrevoltajes positivos y negativos. Los valores mostrados en p.u. fueron calculados considerando un voltaje base igual a 408,25 kV.
CONCLUSIONES Y RECOMENDACIONES
Este trabajo presenta una metodología de modelación y validación en estado estacionario, así como estado dinámico para sistemas eléctricos de potencia aplicadas en el simulador digital en tiempo real de OPAL-RT; específicamente en el software HYPERsim. De igual forma, estas metodologías fueron probadas utilizando sus modelos eléctricos resultantes para la simulación y análisis de transitorios electromagnéticos del corredor de transmisión El Inga-Tisaleo-Chorrillos 500 kV del S.N.I.
El principal aporte de este trabajo es entregar una modelación robusta y validada del S.N.I ecuatoriano en HYPERsim, que es capaz de utilizarse en análisis en estados dinámico y estacionario. En este sentido, CENACE y CELEC EP han venido utilizándolo para llevar a cabo el proyecto de sintonización de PSSs en las principales centrales hidroeléctricas del país.
Por otro lado, al tener el S.N.I. en HYPERsim se pueden realizar estudios dinámicos especializados en tiempo real e interactuar con equipos reales externos (Hardware-in-the-loop), como por ejemplo evaluación de relés de protección, PMUs, AVRs, PSSs, sistemas de protección sistémica, etc., además de realizar estudios que permitan ver la respuesta de varios componentes ante una perturbación; esto presenta una ventaja respecto de los modelos de generador - barra infinita.
Por último, las simulaciones realizadas sobre la energización de LTs de extra alto voltaje permitieron verificar que utilizar interruptores equipados con resistencia de pre-inserción presentan mejores resultados y son una opción para el S.N.I ecuatoriano. Lo cual es un dato importante debido a la experiencia reciente con la que se cuenta al momento, respecto a maniobras operativas en el sistema de 500 kV.
Como trabajos futuros se plantean la vinculación del modelo en HYPERsim con Python; además de la creación de casos de estudio con diferentes estados de generación - carga para un día o varios días, ingresar los sistemas de protecciones, programas de entrenamiento para operadores y la creación de un banco de pruebas de PMUs.

