











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
La pérdida de la biodiversidad es uno de los mayores problemas ambientales que está sufriendo nuestro planeta en la actualidad. A nivel global uno de los principales impulsores de la pérdida de biodiversidad es el cambio del uso de la tierra con un impacto directo en los ecosistemas terrestres y de aguas dulces (1). El cambio del uso de la tierra, particularmente la deforestación con fines agrícolas y la expansión de la frontera agrícola coloca a un 85 % de las especies en riesgo de desaparecer (2).
La influencia humana en los paisajes naturales tiene efectos en la movilidad de las especies, así como en su distribución, afectando especialmente a mamíferos de gran tamaño (3). Esto se debe a que la fragmentación de hábitats produce barreras de movimiento, y además se ha detectado disminución de los desplazamientos de algunas especies debido a una mayor disponibilidad de recursos (i.e. alimentos y agua) (3). La fragmentación del paisaje en la zona andina del Ecuador está afectando directamente al único representante latinoamericano de la familia Ursidae, también conocido como oso de anteojos (OA) u oso andino (Tremarctos ornatus) (4), (5), (6).
El oso de anteojos está considerado como una especie “vulnerable” en la Lista Roja de la UICN de especies amenazadas (7). Su distribución se extiende a lo largo de los Andes tropicales desde Venezuela hasta la frontera entre Bolivia y Argentina, abarcando aproximadamente 38 grados de latitud (8). El oso de anteojos ocupa una variedad de ecosistemas, desde áreas secas en las costas del Perú hasta bosques nublados húmedos y páramos en el norte de los Andes (8). El oso de anteojos es una especie clave para la conservación y manejo de los hábitats andinos ya que es un regulador de la estructura y composición del hábitat, de formación de senderos, poda, y potencial dispersión de semillas (9). Sin embargo, el oso de anteojos es un claro ejemplo de cómo la fragmentación de hábitat, la cacería ilegal lo han llevado a una reducción de población hasta considerarlo en estado de vulnerabilidad a nivel global (10).
Diferentes estudios relacionados con el oso de anteojos en el Ecuador se han realizado, desde aquellos que determinan las características favorables de su hábitat (9), así como estudios que determinan áreas prioritarias para su conservación, y otros enfocados al análisis del nivel de fragmentación de su hábitat (8), (11). Estudios más específicos han analizado los posibles conflictos que se han presentado entre el oso de anteojos y la presencia de zonas ganaderas (12). También, se ha estimado la densidad de la población del oso andino utilizando cámaras trampa en el corredor de conservación ubicado en el noroccidente del Distrito Metropolitano de Quito (13). Las investigaciones que describen el estado de conservación de esta especie han puntualizado ciertas problemáticas como la falta de interés político, falta de coordinación y recursos principalmente en áreas protegidas que coinciden con los hábitats del oso andino (14). En cuanto a programas y planes de conservación del oso de anteojos en el Ecuador, se ha identificado el trabajo de ONG´s que han apoyado al gobierno nacional en la gestión de tres áreas protegidas en las que está presente el oso de anteojos: Podocarpus, Cotacachi-Cayapas, Cayambe-Coca (6).
En el año 2020 el Ministerio del Ambiente y Agua del Ecuador publicó el Plan de acción para la conservación del oso andino en el Ecuador (15). El objetivo principal del plan es: “Mitigar las amenazas identificadas para el oso andino, a través de la gestión integral de las actividades humanas, la investigación, y la protección de la especie y sus hábitats” (15). Una de las líneas de investigación del plan es la investigación científica, y se plantea como una de las acciones: “Evaluar el nivel de conectividad y la utilización de los corredores entre áreas de conservación”. Esta acción se plantea ya que existe un vacío en la investigación relacionada con los corredores ecológicos de conectividad entre áreas protegidas en donde se ha detectado la presencia del oso de anteojos.
Los corredores ecológicos funcionan como estrategias para incrementar la conectividad del paisaje, permiten el libre movimiento de las especies como el oso de anteojos (16), (17). Algunos autores proponen que para lograr metas efectivas de conservación las áreas naturales protegidas estas deben estar conectadas a través de corredores ecológicos y que dicha conectividad es necesaria para asegurar la persistencia de la biodiversidad y el aseguramiento de servicios ecosistémicos (18).
Uno de los enfoques más utilizados por su versatilidad e imparcialidad en el diseño de corredores de conectividad de hábitat son los métodos informáticos (19), (20), (21). El uso de modelos de predicción de hábitats de especies en combinación con el procesamiento en la nube de observaciones de sensores remotos, el manejo de los Sistemas de Información Geográfica (SIG) y los modelos de aprendizaje de máquina (machine learning, ML) han demostrado ser una solución eficiente y precisa para el modelado de corredores ecológicos de conectividad de especies (5), (19), (22).
El estudio de Cotrina-Sanchez et al. (5) exploró el modelamiento matemático de corredores ecológicos para el oso de anteojos en la Amazonía peruana, utilizando herramientas como el Modelamiento de distribución de especies de Maxent en combinación con el análisis multitemporal de cambio de la cobertura del suelo derivado de datos de sensores remotos y procesamiento computacional en la nube. Los autores concluyeron que esta es una metodología costo-eficiente para el diseño de corredores ecológicos y que puede adaptarse para la misma u otras especies en contextos distintos.
El modelamiento de conectividad ecológica también se ha aplicado en el contexto de otras especies en el Ecuador. El estudio de Ríos-Alvear et al. (22) utiliza herramientas de modelamiento matemático combinado con análisis multicriterio participativos para definir áreas clave de conectividad en el corredor ecológico Llanganates-Sangay y utilizando como especie clave al Tapir de montaña (Tapirus pinchaque). El estudio demuestra la aplicabilidad de análisis de circuitos (23) y herramientas de decisión multicriterio para determinar áreas claves de conectividad de paisaje.
Otro enfoque interesante es el aplicado en el estudio de Oliveira-Junior et al. (24) quienes analizaron la conectividad de paisaje en la cuenca de Rio Doce, Brasil. En este caso se aplicó un análisis de conectividad entre especies arbóreas, considerando fragmentos de bosques nativos definidos como hábitats, y otros tipos de uso del suelo definidos como no hábitats. En la metodología de conectividad se aplicó la teoría de circuitos (23) para lo cual se desarrollaron modelos de resistencia de superficie en función del mapa de uso y cobertura del suelo (24). Los resultados muestran áreas en donde se puede implementar medidas de conservación y restauración para mejorar la conectividad del paisaje.
El modelamiento matemático de distribución del oso andino también fue utilizado para predecir la distribución presente y futura de su hábitat en la región amazónica al noreste de Perú (25). Meza et al. (25) utilizaron el modelo MaxEnt, ampliamente aplicado para especies de osos, y se lo configuró junto con 12 variables principalmente bioclimáticas, para analizar escenarios presentes y futuros de distribución de la especie. Se utilizó información climática proyectada de la serie WorldClim V1.4 (26) para predecir escenarios al año 2050 y 2070, lo que indica la versatilidad de los modelos para generar alertas, así como planes de conservación y manejo de los hábitats actuales del oso andino.
El presente estudio se enfoca en la aplicación de modelos Machine Learning para diseñar corredores ecológicos para la movilidad del oso de anteojos entre el área del Parque Nacional Cayambe-Coca y la Reserva Ecológica Antisana, ambas ubicadas al nororiente del Ecuador. Para esto se ha planteado los siguientes objetivos: 1) utilizar el modelo Maxent para conocer la distribución potencial del hábitat del oso de anteojos en la zona de estudio, 2) por medio de la plataforma de procesamiento de imágenes satelitales en la nube Google Earth Engine (27) realizar el mapa de uso y cobertura del suelo para el año 2020 aplicando el algoritmo de aprendizaje de máquina Random Forest (RF), y 3) utilizar el algoritmo de Ruta de Menor Costo (LCP por sus siglas en ingles), para delinear potenciales zonas de corredores ecológicos entre las dos áreas protegidas.
Metodología
Área de estudio
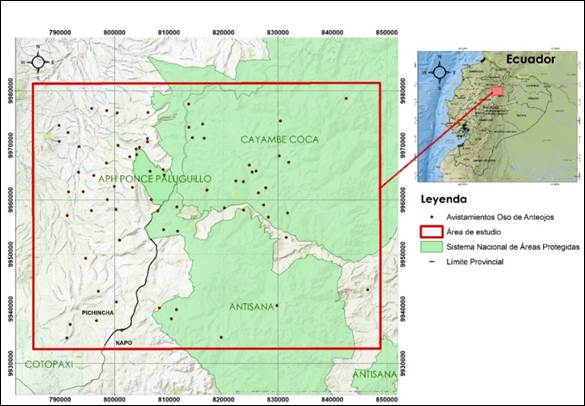
El área de estudio está situada entre el Parque Cayambe-Coca y la Reserva Ecológica Antisana ubicadas en la sierra norte del Ecuador (0.41°S,78.21°W). El área está localizada en el límite entre las provincias de Pichincha y Napo y cubre un rango altitudinal que va desde 1700 a 5500 m.s.n.m, y la precipitación anual promedio fluctúa entre 840 y 2400 mm/año y la temperatura promedio anual fluctúa desde los -2 °C (considerando el Volcán Antisana) y los 17° C. Se contempló un área de influencia de 6 km a partir de los avistamientos del oso de anteojos encontrados entre estas zonas, y se delimitó un rectángulo abarca un total de 310400 ha (Figura 1). El área abarca ecosistemas como el páramo desde las partes más altas, hasta el bosque montano alto en la estribación de la cordillera oriental.
Materiales y Métodos
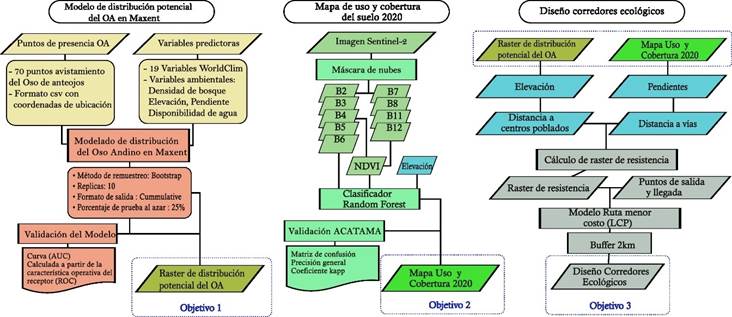
El marco metodológico utilizado empieza con el modelamiento de la presencia del oso de anteojos utilizando el modelo de distribución de especies Maxent (28). Luego, se clasificó las imágenes Sentinel-2 para el año 2020 usando la plataforma de procesamiento en la nube Google Earth Engine (27) por medio del algoritmo de aprendizaje de máquinas Random Forest (29), la clasificación fue validada calculando la matriz de confusión y el estadístico Kappa. El resultado del modelamiento de distribución de hábitat en Maxent, en combinación con el mapa de uso y cobertura clasificado y cuatro capas criterio adicionales permitieron crear un ráster de resistencia sobre el cual se diseñó tres potenciales rutas para los corredores ecológicos del oso andino en el área de estudio aplicando el algoritmo de Ruta de Menor Costo (LCP) (Figura 2).
Datos de presencia del Oso de anteojos (Tremarctos ornatus).
Los datos georreferenciados de los avistamientos del oso de anteojos para el área de estudio fueron obtenidos de la plataforma Global Biodiversity Information Facility (GBIF) (30). Se usó el software QGIS (31) con el complemento GIBF ocurrences (32), que facilita la búsqueda de la presencia de la especie mediante su nombre científico y ubicación, en este caso, Tremarctus ornatus, Ecuador. Se obtuvo los puntos de ubicación con las coordenadas respectivas de los lugares en donde se encuentra la especie, se cargó la capa del área de estudio y se hizo un recorte utilizando la herramienta SIG para que aparecieran los puntos de presencia únicamente dentro del área de estudio.
Los datos obtenidos en el QGIS fueron guardados en formato CSV (archivo de valores separados por coma) para poder utilizarlos en el software Maxent, se encontró un total de 70 datos de presencia del oso andino en el área de estudio. Los datos recopilados son catalogados como observación humana, y provienen del conjunto de datos iNaturalist Research-grade Observations (30).
Variables predictoras bioclimáticas
Para la obtención de variables bioclimáticas se eligieron datos ambientales proporcionados en WorldClim (26). Estas variables se utilizaron para determinar los espacios geográficos donde existe un ambiente más adecuado y potencialmente más apto para la habitabilidad del OA. Todas estas capas de información se procesaron utilizando el software QSIG.
Las variables bioclimáticas se encuentran a diferentes resoluciones espaciales, se seleccionó la resolución a 30” que equivalen a aproximadamente a 100 ha sobre la superficie terrestre, esta resolución se usó al ser la mejor resolución disponible. Las capas que ofrece el portal WorldClim se encuentran en formato tiff y a una temporalidad mensual, es decir, existen 12 ráster por cada variable. La Tabla 1 muestra las 19 variables que se incluyeron en el modelamiento de hábitat.
Tabla 1. Variables predictoras bioclimáticas obtenidas de WorldClim
| Variable | Descripción |
| BIO1 | Temperatura media anual |
| BIO2 | Intervalo medio diurno (media mensual (temperatura máxima - temperatura mínima)) |
| BIO3 | Isotermalidad (BIO2/BIO7) (×100) |
| BIO4 | Estacionalidad de la temperatura (desviación estándar ×100) |
| BIO5 | Temperatura máxima del mes más cálido |
| BIO6 | Temperatura mínima del mes más frío |
| BIO7 | Rango anual de temperatura (BIO5-BIO6) |
| BIO8 | Temperatura media del cuatrimestre más húmedo |
| BIO9 | Temperatura media del cuatrimestre más seco |
| BIO10 | Precipitación del cuatrimestre más cálido |
| BIO11 | Precipitación del cuatrimestre más frío |
| BIO12 | Precipitación anual |
| BIO13 | Precipitación del mes más lluvioso |
| BIO14 | Precipitación del mes más seco |
| BIO15 | Estacionalidad de la precipitación (Coeficiente de Variación) |
| BIO16 | Precipitación del cuatrimestre más húmedo |
| BIO17 | Precipitación del cuatrimestre más seco |
| BIO18 | Precipitación del cuatrimestre más cálido |
| BIO19 | Precipitación del cuatrimestre más frío |
2.4.1 Densidad de bosque
La capa de densidad de bosque se descargó en la web ZENODO a partir del componente global de Copernicus Land Service (33). Esta variable se utilizó debido a la importancia que cumple la presencia de bosque para el refugio que consiguen los osos en la cobertura vegetal del área.
2.4.2 Elevación y pendiente del terreno
La elevación es una variable que aporta en el modelado debido a su influencia en el rango altitudinal en el que habita el OA, se obtuvo del sitio Worldclim (26). Así también la pendiente del terreno es clave para modelar el hábitat del OA, esta se la obtuvo en formato ráster a partir del procesamiento de la capa de elevación, utilizando la función de “slope” en el software QSIG.
2.4.3 Disponibilidad de agua
La disponibilidad de agua se generó por medio del algoritmo de distancia euclidiana en el software QSIG usando como base la capa de hidrografía obtenida de Cartografía de Libre Acceso (Escala Nacional) - Geoportal Ecuador, que contiene la ubicación de los cuerpos de agua en la el área de estudio (34).
Modelamiento de distribución del Tremarctos ornatus en Maxent
El modelado de distribución potencial del OA se realizó utilizando el software de código abierto Maxent versión 3.4.3. (28) el cual utiliza un algoritmo de aprendizaje automático aplicando el principio de máxima entropía. Para el entrenamiento y validación del modelo se usó los 70 puntos de avistamiento del Tremarctos ornatus dentro del área de estudio. Como variables predictoras se utilizaron tanto las 19 variables del WorldClim como las variables: densidad de bosque, pendiente, elevación y disponibilidad de agua, todas exportadas a formato ASCII.
En el programa Maxent, en la sección “Samples” se ingresó la variable objetivo, es decir, los datos de presencia, en este caso “Tremarctos_ornatus.csv”, en la sección “Enviromental Layer” se ingresaron las variables predictoras en el formato especificado. Para generar una predicción robusta, se utilizó el método Bootstrap con 10 réplicas, así como la opción de “crear curvas de respuesta”. Como porcentaje de prueba al azar se usó el 25 % de los datos de manera aleatoria para comprobar la validez del modelamiento, y además se generó la curva ROC (curva característica operativa del receptor).
Validación del modelado en Maxent
Para validar el modelo se usó el método área debajo de la curva (AUC) (35), calculado a partir de la característica operativa del receptor (ROC) (36). El rendimiento del modelo se lo puede evaluar bajo cinco niveles en función de los valores de AUC obtenidos: excelente (> 0.9), bueno (0.8 - 0.9), aceptable (0.7-0.8), malo (0.6 - 0.7) e inválido (< 0.6) (37).
Para la estimación de la importancia de cada variable, se hizo uso del análisis de la prueba jackknife que permite identificar que variables contribuyen en mayor grado a la predicción del modelo y cuales son menos relevantes. En la prueba jackknife, Maxent ejecuta el modelo varias veces excluyendo una variable diferente en cada ejecución, también ejecuta el modelo utilizando todas las variables, e igualmente se ejecuta modelo con cada variable aislada. Este proceso permite comparar los resultados de los diferentes modelos, con variables excluidas o utilizadas individualmente versus el modelo que incluye todas las variables, así se puede evaluar el desempeño del modelo para cada variable específica (35).
Generación de mapa de uso y cobertura del suelo
Para la generación del mapa de uso y cobertura del suelo se realizó la búsqueda de las imágenes de la misión Sentinel-2 del Programa Copernicus de la ESA. Se utilizaron imágenes corregidas por efectos atmosféricos disponibles en el catálogo de datos de la plataforma Google Earth Engine (GEE) (27). Estas imágenes almacenan reflectancia de la superficie y están codificadas como: Colección “COPERNICUS/S2_SR”. Sentinel-2 es una misión de imágenes multiespectrales de alta resolución. El instrumento multiespectral (MSI) a bordo muestrea 13 bandas: cuatro bandas con resolución de 10 m, seis bandas a 20 m y tres bandas a 60 m de resolución espacial (38).
En la plataforma GEE se realizó la búsqueda de la mejor imagen para el año 2020 y con un límite máximo de probabilidad de nubes de 75 %, ya que la zona de estudio tiene una alta presencia de nubosidad. Se identificó la imagen satelital Sentinel-2 de fecha: 2020-08-23 (ID:20200824T153619_20200824T154230_T17MQV), para la cual el área de estudio presentaba mínima cobertura de nubosidad.
A la imagen identificada se aplicó un enmascaramiento de nubes, y se calculó el índice de Vegetación de Diferencia Normalizada (NDVI) usando las bandas espectrales B8 (infrarrojo cercano) y B4 (rojo). El NDVI puede capturar de manera efectiva el patrón fenológico de varias cubiertas verdes (bosques y pajonales) y su separación, arrojando una medida de la vegetación presente en el área de estudio. Además, se incorporó información topográfica con la adición de la banda de elevación obtenida del modelo de elevación digital SRTM (39). Tanto el NDVI, como la banda de elevación del modelo SRTM se agregaron como bandas nuevas a la imagen ya existente previo a la clasificación.
Para la clasificación de imágenes de satélite previamente procesadas, se utilizó el algoritmo Random Forest (RF), capaz de manejar eficientemente datos de alta precisión (29). El RF es un clasificador de conjunto que produce múltiples árboles de decisión, utilizando un subconjunto seleccionado aleatoriamente de muestras de entrenamiento y variables. Este clasificador es comúnmente usado en aplicaciones de teledetección debido a su alta precisión para generar mapas de uso y cobertura del suelo en comparación con otros algoritmos similares (40).
Para la clasificación se utilizó una leyenda de 10 clases y se entrenó el algoritmo RF con un total de 2647 puntos muestreados (Tabla 2) con ayuda de interpretación visual sobre la imagen satelital base proporcionada en la plataforma Google Earth Engine. Se tomó en cuenta que los algoritmos basados en árboles de decisión son sensibles al desequilibrio de clases por lo que se procuró evitar diferencias en el número de muestras. A pesar de que algunas clases cubrían áreas pequeñas como lo fueron las clases de: nieve/hielo y cuerpos de agua permanentes, en donde se tomaron menos muestras (41).
Tabla 2. Leyenda y número de muestras por clase tomadas para el entrenamiento del algoritmo Random Forest.
| Clase | Número de muestras |
|---|---|
| Bosque | 283 |
| Matorral | 171 |
| Pastos | 258 |
| Pajonales | 487 |
| Tierras de cultivo | 181 |
| Construido | 397 |
| Sin cobertura vegetal | 270 |
| Nieve y Hielo | 150 |
| Cuerpos de agua permanente | 155 |
| Nubes | 295 |
Validación del mapa de uso y cobertura del suelo 2020
El proceso de evaluación de la precisión de la clasificación se realizó mediante el uso del complemento ACATAMA (Accuracy Assessment Tool for Assessing Map Accuracy), usado para la validación de mapas de cambio de uso de la tierra (42). Este complemento funciona bajo QGIS y se ejecuta bajo los siguientes pasos: diseño del muestreo (estratificado), diseño de respuesta con clasificación de las muestras y el cálculo de la matriz de confusión o error y estadísticas de precisión.
Para obtener el número de muestras por clase se utilizó la metodología diseñada por la Organización de las Naciones Unidas para la Alimentación y la Agricultura (FAO) (43). El muestreo fue aleatorio estratificado, el cual considera categorías típicas diferentes entre sí que poseen gran homogeneidad respecto a alguna característica, asegurándose de que todas las categorías estarán correctamente representadas en la muestra. Se calculó el de tamaño de muestra general adecuado para posterior a ello distribuir entre los diferentes estratos, se utilizó la Ecuación 1:

En donde 𝑛 es el número de unidades en el área de interés (número de píxeles totales si la unidad espacial es un píxel), 𝑆(𝑂) es el error estándar de la precisión general estimada que nos gustaría lograr, 𝑊(𝑖) es la proporción mapeada del área de clase 𝑖, y 𝑆(𝑖) es la desviación estándar del estrato (43).
En el diseño de respuesta, se cargaron los puntos aleatorios y se utilizó como base la imagen satelital anteriormente procesada, pero con interpretaciones independientes de mayor experticia para asignar a cada punto aleatorio a su respectiva clase (44).
Se calculó la matriz de error (Tabla 3), que es una matriz cuadrada en la que se compara la referencia con la clasificación de la imagen y se contabiliza aciertos o discrepancias ( a 𝑚𝑚 ). En esta matriz, la precisión de la clasificación es evaluada, con las clases de referencia representadas en las columnas y las clases del mapa clasificado en filas. La matriz proporciona a los usuarios la probabilidad de que un área particular del mapa clasificado sea también esa clase en la referencia, a esto le llama precisión del usuario. Además, la matriz indica la precisión del productor, que es la proporción de área que es la clase de referencia y también es clase en el mapa clasificado. La matriz también recoge los denominados errores de omisión (elementos que sin pertenecer a una clase aparecen en ella) y comisión (elementos que pertenecen a una clase y no aparecen en ella, sino que están erróneamente incluidos en otra).
Tabla 3. Matriz de confusión o error, con sus respectivas estadísticas: precisión de usuario, precisión de productor, error de omisión y comisión.
| Referencia | |||||||||
| Clase 1 | Clase 2 | Clase … | Clase m | Total | Precisión usuario | Error comisión | |||
| Mapa Clasificación | Clase 1 | 𝐚 𝟏𝟏 𝒂 𝟏𝟐… | 𝒂 𝟏𝒎 𝒂 .𝟏𝒂 .𝟏 𝒂 … 𝟏−( 𝒂 .𝟏 𝒂 … ) | ||||||
| Clase 2 | 𝒂 𝟐𝟏 𝒂 𝟐𝟐… | 𝒂 𝟐𝒎 𝒂 .𝟐𝒂 .𝟐 𝒂 … 𝟏−( 𝒂 .𝟐 𝒂 … ) | |||||||
| Clase … | |||||||||
| Clase m | 𝒂 𝒎𝟏 𝒂 𝒎𝟐… | 𝒂 𝒎𝒎 𝒂 𝒎𝒂 𝒎 𝒂 … 𝟏−( 𝒂 𝒎 𝒂 … ) | |||||||
| Total | 𝒂 𝟏. 𝒂 𝟐.… | 𝒂 𝟐. 𝒂 …||||||||
| Precisión del productor | 𝒂 𝟏. 𝒂 … 𝒂 𝟐. 𝒂 …… | 𝒂 𝒎 𝒂 …||||||||
| Error de omisión | 𝟏−( 𝒂 𝟏. 𝒂 … ) 𝟏−( 𝒂 𝟐. 𝒂 … )… | 𝟏−( 𝒂 𝒎 𝒂 … )||||||||
La probabilidad de que una ubicación seleccionada al azar en el mapa se clasifique correctamente, se conoce como precisión general, es calculada como el número de unidades clasificadas de manera correcta, sobre el número de unidades consideradas. Para obtenerla se suma los elementos de la diagonal de la matriz de error, divididos para el total de observaciones. Sus valores se encuentran en porcentajes de 0 a 100, siendo mejor la clasificación cuando más cerca el valor está al 100 %. La salida del plugin ACATAMA en el software QGIS, son tanto la matriz de error como la precisión general. La exactitud global suele sobreestimar la bondad de la clasificación (39), por lo que se calculó como un estimador de concordancia el índice Kappa (40).
El índice Kappa, conocido como una medida estadista capaz de reflejar la proporción de acuerdo de la clasificación, excluyendo aquella que puede producirse por azar. Su objetivo es eliminar el efecto que tienen los pixeles correctamente clasificados al azar, sobre el porcentaje de pixeles en los mapas correctamente clasificados, para calcular este índice se usa la Ecuación 2.
Donde: 𝑖 = dimensión de la matriz (número de clases); 𝑎𝑖𝑖 = número de observaciones en la diagonal de la matriz, línea 𝑖, columna 𝑖; (𝑎𝑖.) es la suma de la fila i (total de instancias clasificadas como clase i), y (𝑎.𝑖) es la suma de la columna 𝑖 (total de instancias realmente pertenecientes a la clase i), 𝑛 = número total de observaciones. De acuerdo con (45), los valores de referencia del índice Kappa pueden considerarse en moderado, si el valor esta entre 0.41 y 0.6; sustancial, si esta entre los valores 0.61 y 0.8 y casi perfecto de 0.81 a 1.
Modelado ruta de menor costo para el establecimiento de corredores ecológicos
El enfoque de la ruta de menor costo LCP (Least Cost Path) es una solución óptima que considera la influencia de la matriz en la longitud, la calidad relativa y la redundancia de las rutas de dispersión que conectan los parches de hábitat (5). El enfoque busca optimizar el costo total de la ruta en función de la densidad de costos del campo y factores locales, para este procesamiento se utilizó el complemento de “ruta de menor costo” del software QGIS que permitió delinear la ruta óptima para el oso de anteojos. Este complemento se basa en el principio del algoritmo de ruta más corta de Dijkstra (46), el resultado son las rutas más cortas que existen desde un nodo inicial hasta un nodo objetivo o un árbol de rutas más cortas desde el nodo inicial a todos los demás puntos posibles. Se seleccionó el modelo de Dijkstra por su eficiencia en implementación versus otros algoritmos como el de Bellman (47), utilizado en el caso de existir ponderaciones negativas, o el algoritmo Floyd-Warshall (48) que es de mayor complejidad en su implementación.
Las entradas del complemento LCP son: un ráster de resistencia, un punto de salida y uno o varios puntos de llegada (43). Para la creación del ráster de resistencia fue necesario integrar seis capas de información diferentes: (1) Elevación (obtenida de los datos de elevación del SRTM), (2) pendiente (calculada a partir de los datos de elevación), (3) distancia a carreteras, (4) distancia a centros poblados, (5) Uso y cobertura de suelo del año 2020 y (6) ráster de distribución potencial de Oso andino (generado con Maxent).
Cada uno de los ráster se reclasificó en valores de resistencia que van del 1 al 10, en donde 1 es el valor mínimo y 10 es el valor máximo (45). La asignación de la resistencia para cada ráster se realizó en base a la literatura disponible (Tabla 4).
Tabla 4. Criterios para la reclasificación de ráster, previo a la obtención del ráster de resistencia.
| Ráster reclasificado | Criterios para el procesamiento | Fuente y procesamiento |
| Altitud | Paramos (3000 a 5000 m.s.n.m.) valores de resistencia bajos. Bosques andinos (2000 a 3000 m.s.n.m.) valores de resistencia medios. Bosques nublados (1000 a 2000 m.s.n.m.) y altitudes mayores a los 5000 m.s.n.m. valores de resistencia altos. | Modelo digital de elevación SRTM (39) |
| Distancia a carreteras | Distancias mayores a 5 km valores de resistencia más bajos, y distancias menores a los 5 km y mayores a los 20 km valores de resistencia altos. | Ráster obtenido en un análisis de proximidad a partir de cartografía de vías. |
| Distancia a poblados | Se consideró la capacidad de movilidad del oso andino (49) Distancias a partir de los 3.5 km se asignó valores bajos de resistencia. | Ráster obtenido en un análisis de proximidad a partir de cartografía de centros poblados. |
| Ráster de distribución potencial del OA en Maxent | Según el modelo de distribución potencial obtenido en Maxent. Para valores cercanos a 100 se asignaron valores de resistencia bajos y para valores cercanos a 1 se asignaron valores de resistencia altos. | Ráster resultado del modelo de distribución potencial en Maxent para el oso andino. |
| Ráster de clasificación de uso y cobertura de suelo. | En la clasificación de usos y cobertura de suelo se asignaron valores de resistencia bajos a los usos de suelo en los que había más probabilidad de presencia del oso andino (15) | Ráster resultado de clasificación de uso y cobertura de suelo generado en Google Earth Engine. |
| Pendiente | Pendientes de 15% a 30% se asignó valores de resistencia bajos, pendientes de 35% a 45% se asignó valores de resistencia medios y pendientes mayores a 45% y menores a 10% se asignó valores de resistencia altos. | Pendiente calculada a partir de los datos del modelo digital de elevación. |
Una vez que se reclasificaron las seis capas necesarias, se hizo una sumatoria utilizando la calculadora ráster en el software QGIS y se obtuvo el ráster de resistencia.
Para los puntos de salida se seleccionaron tres puntos de presencia del oso andino dentro del parque nacional Cayambe Coca, dos centrales (salida 1 y 2) y uno colindante al límite del parque (salida 3). Para los puntos de llegada se seleccionaron tres puntos dentro de la Reserva Ecológica Antisana, dos centrales (llegada 1 y 2) y uno en el límite de la reserva (llegada 3). Para utilizar el plugin LCP en QGIS se cargó el ráster de resistencia y se usaron los pares respectivos de puntos de salida y llegada para obtener así tres rutas óptimas.
Una vez que se obtuvo las rutas optimas modeladas por LCP para el movimiento del hábitat, se usaron las mismas para definir un “buffer” o área de influencia de 2 km a cada lado de la ruta, recomendado como espesor mínimo de un corredor (50) para definir los potenciales corredores ecológicos que conectan al Parque Nacional Cayambe Coca y la Reserva Ecológica Antisana.
Resultados
Rendimiento del modelo y la contribución de las variables ambientales.
Se realizaron tres corridas preliminares del modelo Maxent y se identificaron cinco variables bioclimáticas que no contribuían al modelo (BIO1, BIO2 BIO5, BIO10, BIO11) y se las excluyó. En el modelado final se utilizó 18 variables (Tabla 5) y obtuvo un AUC promedio de 0.73 con una desviación estándar de 0.0541 que lo clasifica como un modelo predictivo promedio.
De las 18 variables consideradas para modelar la presencia y desarrollo del oso andino en el área de estudio, el algoritmo del modelo Maxent permitió cambiar aleatoriamente los valores de cada variable entre los puntos de entrenamiento permitiendo conocer los parámetros claves dentro del modelo generado. La variable más importante fue: densidad de bosque con un 26.61 % de aporte al modelo, luego las variables relacionadas la precipitación, con un porcentaje de contribución de 13.2 % para la variable precipitación del mes más seco (B14), un 10.85 % para la variable precipitación del mes más lluvioso (B13) y un 6.91 % para la variable precipitación del cuatrimestre más frío (B19). En lo que respecta al resto de variables, estas contribuyen al modelo por debajo del 6 % (Tabla 5).
Tabla 5. Porcentaje de contribución de variables utilizadas en el modelo Maxent.
| Variable | Porcentaje de contribución (%) |
| Bosque | 26.61 |
| Precipitación del mes más seco_B14 | 13.20 |
| Precipitación del mes más lluvioso_B13 | 10.85 |
| Precipitación del cuatrimestre más frío_B19 | 6.91 |
| Pendiente del terreno | 5.95 |
| Disponibilidad de agua | 5.04 |
| Estacionalidad de la temperatura_B4 | 5.04 |
| Precipitación anual_B12 | 4.86 |
| Elevación | 4.94 |
| Rango anual de temperatura_B7 | 4.26 |
| Precipitación del cuatrimestre más humedo_B16 | 3.84 |
| Precipitación del cuatrimestre más cálido_B18 | 1.71 |
| Temperatura media del cuatrimestre más húmedo_B8 | 1.66 |
| Isotermalidad_B3 | 1.62 |
| Precipitación del cuatrimestre más seco_B17 | 1.37 |
| Estacionalidad de la precipitación_B15 | 1.10 |
| Temperatura mínima del mes más frío_B6 | 1.06 |
| Temperatura media del cuarto mes más seco_B9 | 0 |
Distribución potencial del hábitat del oso de anteojos en la zona de estudio.
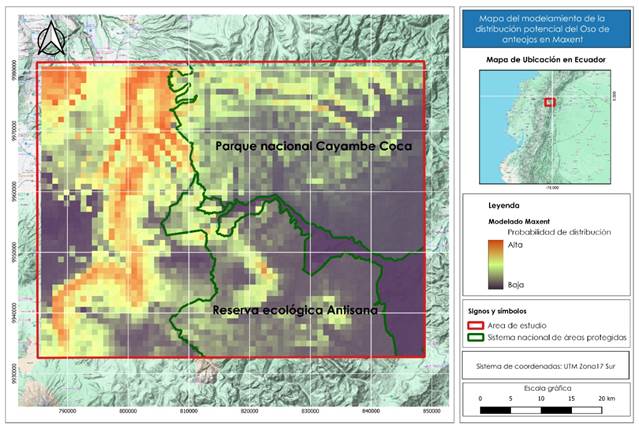
Como resultado del modelo Maxent se obtuvo un ráster que representa la distribución potencial del hábitat del OA, con una resolución por píxel de 100 ha dentro del área de estudio. La escala de distribución se dividió en áreas potenciales: alta, media y baja probabilidad de presencia de la especie Tremarctos ornatus, y se mapeó con una escala de color determinado siendo las zonas con baja probabilidad trazadas en tonos morados, las zonas de media probabilidad en tonos verdes y las zonas con alta probabilidad en tonos rojos (Figura 3).
Se calculó la superficie en hectáreas (ha) para cada categoría según la probabilidad de distribución del oso andino y se encontró que: 205157 ha pertenecen a probabilidad baja (0-35%), 67643 ha con probabilidad media (35-70%, ubicándose principalmente dentro del Parque Nacional Cayambe Coca y la Reserva Ecológica Antisana), y 30349 ha de alta probabilidad (>75 %) de albergar esta especie, ubicadas al oeste del área de estudio.
Mapa de uso y cobertura del suelo para el año 2020 en el área de estudio.
Se utilizó el algoritmo de aprendizaje automático Random Forest para obtener la clasificación de uso y cobertura de suelo del año 2020 utilizando imágenes Sentinel-2 en la plataforma GEE (Figura 4). Se exporto el ráster de clasificación de cobertura y uso de suelo para el año 2020 con 10 clases previamente definidas (Tabla 2). Las clases de uso y cobertura: Bosque con 112964 ha, pajonales de páramo con 72584 ha y matorral con 44521 ha, son las clases que mayor superficie abarcan dentro del área de estudio y representan un 75 % del área total (Tabla 6).
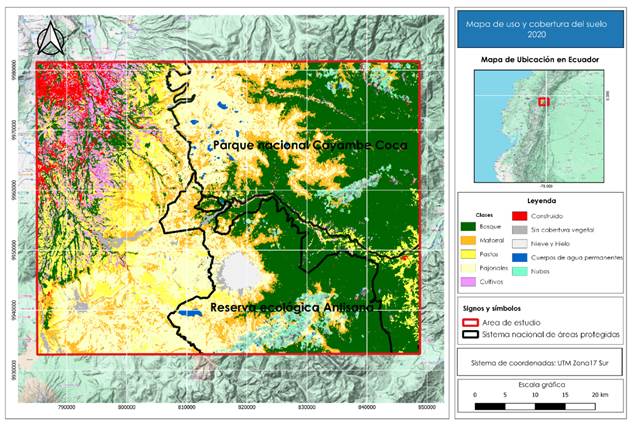
Tabla 6. Superficie en hectáreas de cada clase del Mapa de uso y cobertura del suelo año 2020 en el área de estudio.
| Clase | Descripción | Área (ha) | Porcentaje del área total (%) |
|---|---|---|---|
| 1 | Bosque | 112964.0 | 36.31 |
| 2 | Matorral | 44521.0 | 14.31 |
| 3 | Pastos | 36038.0 | 11.58 |
| 4 | Pajonales | 72584.0 | 24.29 |
| 5 | Cultivos | 17827.0 | 5.73 |
| 6 | Construido | 8775.0 | 2.82 |
| 7 | Sin cobertura vegetal | 5115.0 | 1.64 |
| 8 | Nieve y hielo | 2923.0 | 0.94 |
| 9 | Cuerpos de agua | 1514.0 | 0.49 |
| 10 | Nubes | 5860.0 | 1.88 |
| Total | 308121 |
Validación del Mapa de uso y cobertura del suelo para el año 2020.
La validación del mapa de uso y cobertura para el año 2020 en referencia a la precisión general cumple satisfactoriamente al obtener un valor de 0.89. Se obtuvo un número total de muestras a ser evaluadas de 𝑛=378 y se realizó una distribución proporcional al área de cada clase con valores de precisión esperada del usuario que variaron desde 0.6 a 0.85. Los resultados de la matriz de error (Tabla 7) muestran que las coberturas con mayor precisión de usuario son de las clases: bosque (0.91), matorral (0.89), pastos (0.90), pajonales (0.94), mientras que las más bajas para las clases cultivos (0.68) y cuerpos de agua permanente con (0.5).
Por otro lado, se obtuvo el índice Kappa con un valor de 0.87, el cual ratifica los buenos resultados obtenidos con el clasificador Random Forest para el mapa de cobertura y uso del suelo del año 2020.
Tabla 7. Matriz de error para la clasificación del mapa de cobertura y uso de suelo2020.
| Referencia | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Clase | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | Total | Precisión usuario | |
| Clasificación Clasificación | 1 | 126 | 3 | 1 | 0 | 6 | 0 | 2 | 0 | 0 | 0 | 138 | 0.91 |
| 2 | 0 | 49 | 2 | 2 | 0 | 0 | 2 | 0 | 0 | 0 | 55 | 0.89 | |
| 3 | 0 | 2 | 40 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 44 | 0.90 | |
| 4 | 0 | 2 | 2 | 84 | 0 | 0 | 0 | 0 | 0 | 1 | 89 | 0.94 | |
| 5 | 0 | 1 | 1 | 0 | 15 | 3 | 2 | 0 | 0 | 0 | 22 | 0.68 | |
| 6 | 0 | 1 | 0 | 0 | 1 | 9 | 0 | 0 | 0 | 0 | 11 | 0.81 | |
| 7 | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 0 | 0 | 1 | 6 | 0.83 | |
| 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 4 | 1 | |
| 9 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 2 | 0.50 | |
| 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7 | 7 | 1 | |
| Total | 126 | 58 | 46 | 88 | 23 | 12 | 11 | 4 | 1 | 9 | 378 | ||
| Precisión de productor | 1 | 0.84 | 0.87 | 0.96 | 0.65 | 0.75 | 0.47 | 1 | 1 | 0.78 | 1 | ||
Implementación del algoritmo LCP para la delineación de corredores ecológicos.
Finalmente, para dar respuesta al último objetivo planteado se generó las rutas de menor costo para el establecimiento de corredores ecológicos entre el parque nacional Cayambe - Coca y la reserva ecológica Antisana, obteniéndose tres rutas que cumplen con los seis criterios establecidos para la creación del ráster de resistencia (Figura 5).
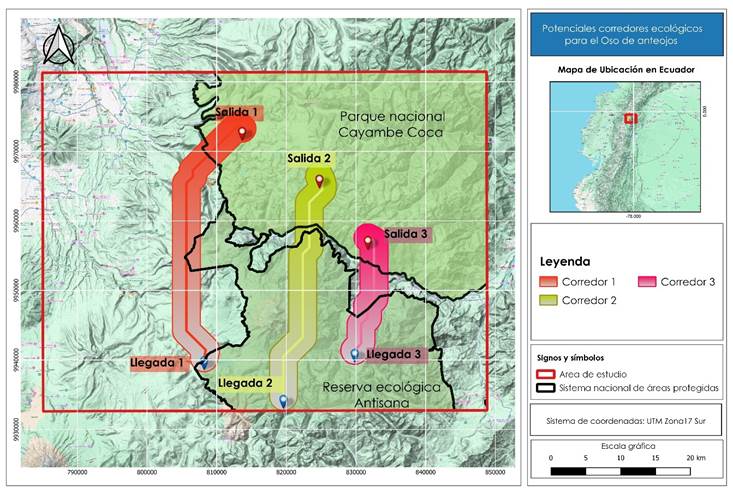
El Corredor 1, parte desde el parque nacional Cayambe Coca y termina en la zona este de la reserva ecológica Antisana, comprende la ruta más larga de las tres con una distancia de 38.4 km atraviesa zonas de cobertura de tipo bosque, matorral y pajonal con elevaciones que van desde los 4000 a 4200 m.s.n.m. y abarcan la zona de amortiguamiento buffer de 2 km.
El Corredor 2, Comprende una distancia de 34 km parte desde el parque nacional Cayambe Coca y termina en la zona central de la reserva ecológica Antisana, a diferencia del Corredor 1 se tiene que la cota inicial empieza en los 3600 m.s.n.m. hasta los 4000 m.s.n.m. por lo que la accesibilidad de esta ruta en términos geográficos genera un menor costo, de igual manera la zona de amortiguamiento de 2 km por lado permite atravesar las dos zonas protegidas que intersecan dentro del área de influencia.
Y el Corredor 3, que mide una distancia mucho menor de 17.8 km, este parte desde el parque nacional Cayambe Coca y termina en la zona oeste de la reserva ecológica Antisana, en cuanto al perfil de elevación este parte desde los 3400 m.s.n.m. y va hasta los 3600 m.s.n.m., atravesando cobertura de tipo bosque en su gran mayoría.
Discusión
En el presente estudio se demostró la delineación de corredores ecológicos para el oso de anteojos en el nororiente del Ecuador a través de la integración de modelos de computación en la nube como GEE (51) combinados con modelos de aprendizaje automático como Maxent (28). Este estudio demuestra la utilidad y rentabilidad de los métodos informáticos para producir información espacial relacionada a la conectividad de hábitats, la cual es de gran importancia para el diseño de planes de gestión de la conservación.
Estudios previos en la región han demostrado la capacidad de Maxent para el modelado de hábitat del OA (5), (25), (52), (53). Estos estudios se han concentrado principalmente en determinar la probabilidad de ocurrencia de la especie, entender su distribución y definir zonas para enfocar los esfuerzos de conservación. El estudio de Figueroa at al. (52) se desarrolló en el Bosque seco del Marañón - Perú, y tuvo como objetivo determinar áreas prioritarias para la investigación y conservación del oso andino basado en los resultados del modelamiento en Maxent. Otro aporte metodológico, es el estudio de distribución de hábitat aplicado en la Provincia del Napo-Ecuador que, en combinación con datos de cambio de uso del suelo, demostró la fiabilidad de Maxent para determinar zonas prioritarias para implementar estrategias de conservación en la provincia. Sin embargo, se ha encontrado pocos casos en la literatura en los que se utilice los resultados del modelamiento de hábitat de Maxent para delinear corredores ecológicos como una estrategia adicional de conservación. Uno de los casos más cercanos es el estudio de Cotrina-Sánchez et al.(5) en el cual si se emplea el modelamiento de hábitat de especies en conjunto con herramientas de delineación de corredores ecológicos para el OA, sin embargo el estudio se lo realiza para territorio rurales de región amazónica del Perú. El presente estudio a diferencia de los anteriores se enfoca en las zonas de transición de páramo y bosque nublado al nororiente del Ecuador y obtuvo como resultados zonas delineadas de corredores ecológicos para el OA.
En el presente estudio, las variables que contribuyeron a la determinación de la distribución potencial del oso andino se analizaron mediante el proceso de modelación del hábitat potencial de la especie en el modelo Maxent. Este proceso permitió observar los porcentajes de aporte de cada variable. Entre estas variables, aquellas con mayor contribución fueron la cobertura vegetal de tipo bosque aportando un 26.6 % al modelo, seguida por la precipitación del mes más seco (BIO14) con un 13.2 % y la precipitación del mes más lluvioso (BIO13) con un 10.85 %, que sumadas aportan alrededor del 50 %. En el estudio de Meza et al.(25), en el cual se utilizó 12 variables ambientales para predecir la distribución potencial del OA en el noreste del Perú, se encontró que la temperatura media del trimestre más seco (BIO09), la precipitación del mes más seco (BIO14) y el porcentaje de cobertura forestal (disponibilidad de refugio) aportaron hasta el 75.2% del modelo de distribución potencial del OA. Esto refleja que, a pesar de las diferencias geográficas de las áreas de estudio, así como en la configuración de los modelos y la manera de seleccionar las variables hay una coincidencia en dos variables que tienen una gran contribución para determinar la distribución potencial de hábitat del OA: cobertura forestal y precipitación del mes más seco. Por otro lado, la variable pendiente del terreno que contribuyó con un 5.95% en el presente estudio, también presentó valores de contribución bajos en el trabajo de Meza et al.(25), e incluso ha tenido aportes de 0 % en el estudio de Figueroa et al. (52). Estudios anteriores (25), (52) coinciden con el presente en que una de las variables claves para considerar el modelamiento del hábitat del OA es la disponibilidad de refugio, la cual puede expresarse como cobertura forestal y se explica ya que los OA tienen una fuerte actividad relacionada con la construcción de nidos, así como para su alimentación (10).
Los resultados de las variables que más contribuyen al modelado de hábitat de especie del OA difieren con el estudio de Rodríguez-Cabezas et al. (53) quienes utilizaron principalmente las variables bioclimáticas de WorldClim. En dicho estudio se identificó como las variables que más aportan al modelo: temperatura media anual (BIO1), precipitación del mes más seco (BIO14), y estacionalidad de la temperatura (BIO4) con 51.9 %, 16.7 % y 11.9 % respectivamente. Una posible razón para esta diferencia es que Rodríguez-Cabezas et al. No utilizan datos relacionados a uso y cobertura del suelo como variable de Maxent, a pasar de disponer de los mismos en un análisis multitemporal de su variabilidad. Adicionalmente, se puede identificar diferencias como el área misma de estudio que a pesar de ser cercanas son diferentes en extensión. Así mismo la base de datos de presencias del OA utilizados por Rodríguez-Cabezas et al. Cubren una diferente extensión geográfica que los del presente estudio. A pesar de estas diferencias en el enfoque de modelamiento hay coincidencias en los patrones espaciales de distribución resultantes de ambos estudios (ver Figura 3A en (52)).
De acuerdo con los resultados del modelo final de Maxent, se encontró dentro del área de estudio un total de 30349 ha clasificadas con una alta probabilidad (> 75 %) de albergar a la especie del OA. Hay que notar que estas áreas de mayor probabilidad están ubicadas al oeste del área de estudio y por fuera de las áreas protegidas (Figura 3), lo que supone una alerta para las instituciones encargadas de velar por la protección de esta especie. En comparación con el estudio de Rodríguez et al. (53), que analiza la distribución del OA para la provincia de Napo, hay una similitud en el patrón de distribución espacial de la distribución potencial del OA, siendo este de mayor probabilidad en la frontera entre Pichincha y Napo y que va disminuyendo progresivamente en dirección hacia el este.
En cuanto al mapa de uso y cobertura del suelo del año 2020, se ha demostrado la robustez del clasificador Random Forest que, sumado a la versatilidad de la plataforma de procesamiento en la nube, Google Earth Engine, permiten realizar de una manera eficiente la clasificación de imágenes satelitales. La clasificación se validó utilizando 378 muestras y se obtuvo una precisión general bastante satisfactoria de 89 %, y un excelente coeficiente Kappa de 0.87, valores aceptables en comparación con clasificaciones similares realizadas en páramo andino (54). En estudios similares, Cotrina et al. (5) obtuvo valores de Kappa de 0.90, 0.86, 0.85 y 0.88 para clasificaciones de uso y cobertura del suelo de los años 1990, 2000, 2010 y 2020, respectivamente. Si bien una de las limitantes del presente estudio es que no se consideró como objetivo realizar un estudio multitemporal como el de Cotrina et al., vale recalcar que el método empleado podría replicarse con buenos resultados en la zona de estudio. Los altos valores de precisión de usuario de las clases: bosque (0.91), matorral (0.89), pastos (0.90), pajonales (0.94), pueden estar ligados al tratamiento previo de la imagen satelital y la combinación con la capa de NDVI, la cual ayuda a discriminar la fenología vegetal y ha sido probada en otros estudios (55), (56). En cuanto a la clase Sin cobertura vegetal y Construido la precisión de usuario fueron de 0.83 y 0.81 respectivamente estando en un rango muy aceptable. Por otro lado, los valores más bajos se ubicaron dentro de la clase: cultivos (0.68) y cuerpos de agua con (0.5) este descenso en la precisión de usuario puede estar vinculado a factores como la presencia de ruido en la imagen, interferencia como nubes cercanas a la zona de estudio. También, vale notar que en el caso de la clase cuerpos de agua, el diseño muestral estratificado apenas determinó dos puntos de validación por ser una clase relativamente pequeña en extensión, y por lo tanto al tener un solo error, la precisión de usuario se reduce al 0.5.
El establecimiento de corredores ecológicos se ha pensado como una estrategia para conectar poblaciones de especies vulnerables a través de los Andes y como una medida para mejorar la conectividad de paisajes (57).
Una ventaja adicional de estudiar corredores de conservación para especies paraguas como el OA (58), es que conjuntamente se puede desarrollar estrategias de conservación y manejo de otras especies que comparten el mismo territorio (25), (59), (60) y (61). La implementación de estos corredores también puede ser clave en fomentar procesos de conservación participativa que involucre comunidades locales, gobiernos descentralizados, academia, ONGs, y otros actores que puedan estar presentes en las zonas de interés (22), (60). Esto último abre una línea de investigación interesante en la que se combine el diseño técnico de los corredores con los criterios de participación de los diferentes actores.
En el presente estudio se delineó tres corredores ecológicos. El Corredor 1, con una longitud de aproximadamente 38.4 km, atraviesa zonas con elevaciones entre los 4000 y 4200 m.s.n.m. El Corredor 2, de unos 34 km de longitud, varía en elevación desde los 3600 hasta los 4000 m.s.n.m., con una ruta en posición central entre las reservas a conectarse. Y, el Corredor 3, ubicado al este del área de estudio, que es el más corto con alrededor de 17.8 km, desciende desde los 3400 hasta los 3600 m.s.n.m. y atraviesa áreas boscosas y de pastos. Si bien el Corredor 1 coincide con zonas de alta probabilidad de presencia del OA, también abarca una mayor superficie por fuera de las dos áreas protegidas a conectarse, y su longitud es la mayor, lo que implicaría mayores costos en su implementación. Lo opuesto sucede con el Corredor 3, su longitud es la menor de todas (17.8 km), y su posición coincide con zonas de menor probabilidad potencial de presencia del OA. Mientras que el Corredor 2, es una opción intermedia, abarca ciertas zonas con probabilidad intermedia de presencia del OA, además, en términos de conectividad entre las dos áreas, es el que tiene menor distancia de separabilidad en su trayecto (Figura 5). Una de las ventajas de la metodología aplicada en el presente trabajo, es que provee diferentes opciones las cuales pueden ser evaluadas en combinación con otras metodologías de tipo análisis multicriterio participativo (22), para obtener resultados consensuados sobre el territorio.
Una consideración relevante en este estudio es la disponibilidad y resolución (espacial y temporal) de los datos geoespaciales. En el caso de las imágenes satelitales Sentinel-2, a pesar de su alta periodicidad de ~ 6 días, la zona de estudio es altamente propensa a un alto porcentaje de nubosidad lo que dificulta la generación o actualización de mapas de cobertura del suelo (62). Los datos bioclimáticos también pueden considerarse una limitante en este tipo de estudios, ya que suelen ser escasos y comúnmente se recurre a fuentes como WorldClim, en las que las resoluciones adecuadas sueles ser algo gruesas ~1 km2, sin embargo, es la mejor resolución disponible para realizar este tipo de modelamiento. Algunos estudios han analizado los efectos de utilizar diferentes fuentes de datos geoespaciales y han encontrado leves variaciones en el desempeño de los modelos, lo cual depende de la resolución espacial y temática de la fuente (19). Otros autores han demostrado mejoras en el modelamiento de riqueza de especies al utilizar datos de alta resolución espacial (63), e incluso el uso de datos de fuentes nuevas como las tecnologías LiDAR se reporta mejoras en el desempeño de modelos (64), (65). Futuras investigaciones pueden realizarse utilizando datos de nuevas fuentes de información con mejor resolución espacial y temporal para comparar el desempeño y resultado en el modelado de corredores ecológicos.
Se ha demostrado la factibilidad de delinear corredores ecológicos para el OA entre el área del Parque Nacional Cayambe-Coca y la Reserva Ecológica Antisana integrando modelos computacionales y modelos de aprendizaje automáticos de una manera eficiente y precisa. Este hallazgo tiene implicaciones significativas para el Plan de acción para la conservación del oso andino, ya que una de sus líneas de investigación consiste en evaluar el nivel de conectividad que existe entre las áreas protegidas, y la metodología del presente estudio ha demostrado ser una solución practica para el modelado de corredores ecológicos de conectividad. Estos resultados abren nuevas posibilidades para desarrollar redes interconectadas entre las áreas protegidas, los cuales pueden basarse en diferentes especies a conservar, este tipo de corredores ayudan aprevenir la degradación de los ecosistemas, así como reducir el riesgo de extinción de diferentes especies.
Conclusiones
El presente estudio examinó la aplicación de modelos Machine Learning para la delineación de corredores ecológicos para la movilidad del oso de anteojos entre el área del Parque Nacional Cayambe-Coca y la Reserva Ecológica Antisana. Se demostró que por medio de métodos informáticos y de una manera eficiente y relativamente rápida se pudo delinear tres potenciales corredores ecológicos de conectividad entre las áreas protegidas.
Utilizando el modelo Maxent y 18 variables bioclimáticas se obtuvo la distribución potencial del oso de anteojos en el área de estudio. Las variables que más contribuyeron en el modelado fueron: la presencia de bosque (26.61 %), la precipitación del mes más seco (13.2 %) y la precipitación del mes más lluvioso (10.85 %). El modelado del hábitat potencial permitió identificar 30349 ha dentro del área de estudio con una alta probabilidad (> 75 %) de presencia de la especie oso de anteojos (Tremarctos ornatus), la cual se ubica principalmente al lado oeste de las áreas protegidas en el límite entre las provincias de Pichincha y Napo.
Por medio del algoritmo Random Forest, se obtuvo el mapa de uso y cobertura del suelo, que identificó como las clases de mayor presencia en el área de estudio a: Bosque (36.3 %), pajonales (24.3 %) y matorrales (36.3 %). El mapa se validó utilizando el método de matriz de confusión con excelentes resultados, una precisión general de 0.89 y un coeficiente kappa de 0.87.
Utilizando el mapa de distribución potencial de oso de anteojos en combinación con el mapa de uso y cobertura del suelo y las variables: distancia centros poblados, distancia a vías, elevación y pendientes fue posible crear un ráster de resistencia sobre el cual se aplicó el algoritmo de ruta de menor costo (LCP) para diseñar tres corredores ecológicos en diferentes ubicaciones en el espacio geográfico que separa el Parque Nacional Cayambe-Coca y la Reserva Ecológica Antisana (Figura 5). Del análisis de los tres corredores se pudo identificar que el Corredor 2, presenta mejores condiciones para fomentarlo como una zona de conservación.
Las observaciones científicas obtenidas a partir de este estudio nos ayudan a formular recomendaciones sostenibles que apoyarán las diferentes iniciativas de conservación. El método propuesto puede utilizarse también para otras especies de fauna y en otros sectores de conectividad entre áreas protegidas. Los modelos de aprendizaje de máquina en apoyo de la computación en la nube y la tecnología geoespacial están brindando soluciones técnicas rápidas y precisas para el diseño de diferentes estrategias de conservación.
Se recomienda a los gestores de áreas protegidas y funcionarios de gobiernos locales adoptar el diseño propuesto de corredores, el mismo que puede ser fortalecido con procesos de difusión y concertación por medio de la conformación de estructuras de gobernanza local que faciliten la implementación y monitoreo de los corredores. Futuros trabajos podrían orientarse en la validación de los corredores propuestos mediante procesos participativos de monitoreo, o por medio de modelado de movimiento del oso andino. También se podría investigar la adaptabilidad de los corredores bajo escenarios de cambio climático para robustecer la planificación territorial adaptativa a largo plazo.
Contribución de los Autores
Conceptualización: A.L. y N.R.; Curación de datos: A.L. y N.R.; Análisis formal: A.L. y N.R.; Adquisición de fondos: A.L. y N.R.; Investigación: A.L., N.R. y C.C.; Metodología: A.L., N.R. y C.C.; Administración del proyecto: A.L., N.R. y C.C.; Recursos: A.L., N.R. y C.C.; Software: A.L. y N.R.; Supervisión: C.C.; Validación: A.L. y N.R.; Visualización: A.L., N.R. y C.C.; Redacción - borrador original: A.L. y N.R.; Redacción - revisión y edición: A.L., N.R. y C.C. Todos los autores han leído y aprobado la versión publicada del manuscrito.

