











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
La movilidad eléctrica constituye uno de los principales pilares de la transición energética a nivel mundial hacia un modelo más sostenible y responsable con el medio ambiente. La ciudad de Quito desde el año 1995 es pionera en Ecuador en la utilización de transporte público eléctrico con el sistema Trolebus. Recientemente, ha iniciado una nueva etapa de desarrollo del transporte público sostenible con la aprobación en 2024 de la Ley de Competitividad Energética, la cual determina que, a partir del año 2030 todos los vehículos que se incorporen al servicio de transporte público urbano en el Ecuador continental, deberán ser únicamente de medio motriz 100 % eléctrico o de cero emisiones.
En la actualidad, el sector del transporte es uno de los principales responsables de los problemas medioambientales. En efecto, la emisión de gases de efecto invernadero y la contaminación atmosférica podrían disminuir drásticamente con la masificación de la movilidad eléctrica. Según datos de la Organización Latinoamericana de Energía, el transporte en Ecuador constituye el 48.4% del consumo total de energía [1]. Si se sustituye la fuente de esa energía proveniente de combustibles fósiles por fuentes renovables, el impacto ambiental sería muy significativo.
A pesar de los incentivos gubernamentales, se espera que la penetración de los buses eléctricos se desarrolle de manera gradual a partir del año 2025. Esto debido a que el costo de un bus eléctrico es considerablemente mayor al de un bus convencional a diésel, inclusive sin considerar el costo de la infraestructura de carga adicional requerida. Se generará entonces un escenario de oferta de transporte mixto (diésel - eléctrico), al menos en los primeros años. Esto plantea diversos retos para la planificación de la infraestructura de red eléctrica de distribución necesaria para la incorporación de esta nueva tecnología. Se debe garantizar que dicha red tenga la suficiente capacidad para alimentar las estaciones de carga y, que los módulos de carga resulten suficientes para abastecer de energía eléctrica a las unidades de transporte público.
En la práctica, para diseñar de forma robusta un sistema completo de buses eléctricos, baterías y estaciones de carga, es necesario conocer, con alta precisión, el requerimiento de energía durante su operación. Esta energía se encuentra fuertemente correlacionada con factores complejos como son: características del vehículo, la ruta, influencia meteorológica, número de pasajeros, influencia del conductor y requerimientos específicos de la compañía de transporte o la autoridad de control de tránsito. A estos factores se debe añadir el nivel de congestión vehicular que constituye por sí solo una variable bastante compleja de predecir, por exhibir una naturaleza multicausal.
La estimación del consumo de los VE mediante valores provenientes de catálogos de fabricantes aporta grandes incertidumbres al problema de diseño y optimización de rutas de transporte, ya que no considera ninguna variable dinámica de su comportamiento. Por otro lado, estas especificaciones de consumo y/o autonomía normalmente consideran condiciones ideales que no pueden replicarse en la práctica. La modelación del transporte, lo más ajustada posible a la realidad, constituye una herramienta robusta, no solamente para estimar las citadas variables, sino también para responder a complejas preguntas de planificación, como son: la definición de estrategias de gestión del tráfico y sus repercusiones.
De lo expuesto, emerge la necesidad de modelar rutas reales de transporte, considerando además de las especificaciones del vehículo, variables como las características geográficas de la ruta, comportamiento dinámico del vehículo dependiente del nivel de congestión vehicular y porcentaje de ocupación de pasajeros.
Se han realizado investigaciones recientes donde se analiza el impacto de ciertas variables en el desempeño de vehículos eléctricos mediante simulaciones. Se ha demostrado mediante la utilización de software de código abierto que, ciertos parámetros como la masa del vehículo resultan fundamentales para analizar su comportamiento en rutas urbanas [2]. Así mismo se han propuesto distintos modelos para evaluar el consumo energético de vehículos eléctricos validándolos con datos de fabricantes y mediciones de bancos de pruebas. Se han aplicado estos modelos en casos de estudio de flotas de vehículos en ciudades europeas [3].
La confiabilidad del modelo de estimación energética ha sido estudiada en diversas oportunidades. Se han evaluado los diversos modelos matemáticos disponibles en la literatura y se ha propuesto los requisitos de un modelo energético realista, preciso y escalable [4]. Análogamente se ha realizado análisis comparativos a partir de pruebas en ruta, en donde se establecen ciertas discrepancias entre los modelos propuestos y los resultados obtenidos en el mundo real [5].
En el país no se ha encontrado investigaciones en donde se simule microscópicamente rutas de transporte eléctrico y en donde también se pueda evaluar dinámicamente parámetros externos al vehículo eléctrico. La utilización del software SUMO en el país aún es marginal, por lo que este trabajo también busca incentivar su utilización en la amplia gama de aplicaciones que pone a disposición del usuario.
En el presente trabajo, sobre la base de micromodelaciones de buses eléctricos, así como la simulación detallada de variables relacionadas con las condiciones reales de las rutas de transporte, se obtiene una estimación del consumo energético de los buses eléctricos y, a través de un análisis de sensibilidad, se determina el impacto en dicho consumo, ante el cambio de comportamiento de dichas variables críticas. Estos resultados permitirán, en el futuro, determinar soluciones relativas a la gestión logística y energética de estos sistemas de transporte modernos.
Las secciones 2 y 3 definen la metodología utilizada para modelar el comportamiento energético de buses eléctricos y su ruta de transporte. La sección 4 describe el caso de estudio real donde se aplicó la metodología y la sección 5 incluye la estimación del consumo energético y el análisis de sensibilidad obtenidos como resultado de las simulaciones.
Finalmente, como aporte el presente trabajo se establecen conclusiones importantes relacionadas con la autonomía real de los buses eléctricos y con la importancia de la definición de las variables relevantes a ser incorporadas en los modelos de simulación de los sistemas de transporte público.
MODELO DE BUSES ELÉCTRICOS
Modelamiento dinámico de consumo de un vehículo eléctrico
El modelamiento de las unidades de buses eléctricos y del conjunto de rutas de transporte fueron realizadas en el programa denominado SUMO por sus siglas en inglés (Simulation of Urban Mobility). SUMO es un software simulador de tráfico de código abierto desarrollado por el Centro Aeroespacial Alemán (DLR) con la colaboración de organizaciones externas y el aporte de desarrolladores independientes. Los softwares de simulación de tráfico se clasifican de acuerdo con su entorno de trabajo:
Simulación Macroscópica: Considerando la dinámica promedio de un flujo de vehículos.
Simulación Microscópica: Considerando un modelo dinámico individual por vehículo.
Simulación Mesoscópica: Resulta de la mezcla de las dos anteriores [6].
El presente trabajo hará uso de SUMO en simulaciones microscópicas considerando diversos escenarios de flujos de tráfico aleatoriamente generados y buses eléctricos individuales que conformarán la ruta de transporte bajo análisis.
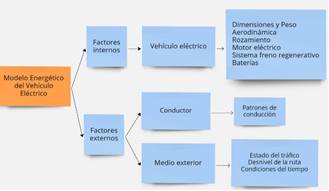
Para realizar simulaciones de tráfico, un modelo realista del consumo energético de un vehículo debe considerar diversos factores internos y externos, los mismos que se pueden apreciar en la Fig. 1. Para la estimación del consumo del bus eléctrico se estudiaron modelos que han sido previamente desarrollados en diversa literatura especializada. Los modelos de consumo energético abarcan dos partes principales: la parte del consumo energético y la de recuperación de energía. La parte de consumo de energía permite analizar la tracción que se entrega a las ruedas que permite el movimiento del bus eléctrico y se compone de dos subsistemas mecánico y eléctrico.
El subsistema eléctrico se modela considerando las pérdidas eléctricas y la energía consumida por los servicios auxiliares del vehículo tales como: aire acondicionado, iluminación, comunicaciones, indicadores, radio, etc [4]. La recuperación de energía depende del sistema de freno regenerativo que permite convertir la energía cinética en energía eléctrica que será almacenada en la batería del VE.
El modelo escogido para estudiar el comportamiento energético del VE se basa en analizar la variación y el balance entre energías cinética, potencial, rotacional y las diferentes pérdidas del sistema. Este análisis se lo realiza de forma discreta en intervalos definidos de tiempo.
La energía del vehículo E 𝑣𝑒ℎ [𝑘] en el tiempo discreto k se calcula con la Ec. 1, siendo m la masa del VE incluyendo los pasajeros, v[k] la velocidad del VE en el tiempo k, g la aceleración de la gravedad, h[k] la altura del VE y Jint el momento de inercia de los elementos rotativos internos [2].

Las pérdidas de energía se analizan en cada intervalo discreto de tiempo de acuerdo con la ganancia o pérdida de energía del sistema mediante la Ec. 2.

Las pérdidas de energía se calculan a partir de la resistencia del aire 𝛥𝐸 𝑎𝑖𝑟 , fuerza centrípeta 𝛥𝐸 𝑐𝑟𝑣 , rozamiento de las ruedas con la calzada 𝛥𝐸 𝑟𝑜𝑧 y el consumo promedio de cargas constantes 𝛥𝐸 𝑐𝑜 , según las ecuaciones Ec. 3 y Ec. 4.





Siendo 𝛿 𝑎𝑖𝑟𝑒 la densidad del aire, 𝐴 𝑣𝑒ℎ el área frontal del vehículo, 𝐶 𝑤 el coeficiente de resistencia del aire, 𝛥𝑠 𝑘 la distancia recorrida en el intervalo de tiempo, 𝐶 𝑟𝑜𝑧 el coeficiente de rozamiento de las ruedas con la calzada, 𝐶 𝑟𝑒𝑠 el coeficiente de resistencia en curvas, 𝑟 el radio de la trayectoria circular y 𝑃 𝑐𝑜 la potencia de las cargas constantes del VE. El término 𝛥𝐸 𝑘 puede ser positivo o negativo dependiendo si el VE ha ganado o perdido energía fruto de su movimiento en la ruta. A partir de las ecuaciones Ec. 8 y Ec. 9 se puede calcular la energía restante en las baterías del VE para cualquier estado discreto del tiempo, considerando los factores de eficiencia de recuperación ( 𝜂 𝑟𝑒𝑐 ) y de eficiencia de propulsión ( 𝜂 𝑝𝑟𝑜𝑝 ) [2].


Las eficiencias en propulsión y recuperación dependen del desempeño del conjunto motor eléctrico - transmisión ( 𝜂 𝑚 , 𝜂 𝑡 ) de acuerdo con las ecuaciones Ec 10. y Ec 11 [2].


Parámetros de buses eléctricos
Las especificaciones técnicas de los buses eléctricos utilizados en el presente trabajo se obtuvieron de catálogos del fabricante, resumidos en la Tabla 1. El fabricante de buses escogido dispone de unidades operando en varias ciudades de Latinoamérica incluyendo Ecuador, y de acuerdo con la plataforma e-bus radar sus vehículos constituye el 45% de buses operando en la región.
SIMULACIÓN DE RUTAS DE TRANSPORTE
La simulación dinámica de las rutas de buses de transporte público en la ciudad de Quito se ha desarrollado en el software SUMO. Para simular el tráfico es necesario enlazar los diferentes elementos que componen el escenario de la red vial, dentro de los más importantes están:
Datos de la red: avenidas, carreteras, cruces, redondeles, aceras y senderos.
Demanda de tráfico: Rutas de transporte público y particular, viajes individuales o flujos de tráfico de vehículos pesados, livianos, peatones.
Infraestructura de tráfico: semáforos, paradas, prioridad de cruces, etc.
Polígonos: Elementos topológicos adicionales como manzanas, lugares de interés.
Estos elementos conforman un escenario de simulación que permite determinar el comportamiento estocástico de un sistema vial. La representación de un sistema vial en SUMO se realiza a través de la teoría de grafos. En donde los nodos y aristas representan elementos reales como intersecciones y autopistas respectivamente, los cuales tiene sus propios atributos. Para el análisis de resultados por tanto es necesario simular un escenario varias veces para poder extraer conclusiones estadísticas [6].
Dentro de las rutas urbanas que actualmente prestan el servicio de transporte público en la ciudad de Quito, se ha escogido la ruta Marín - Ciudadela Tarqui que tiene una extensión total de 10.67 km. Esta ruta resulta idónea para el análisis de sensibilidad ya que a pesar de su corta longitud contiene grandes desniveles en altura y atraviesa zonas de tráfico moderado e intenso también con una alta variabilidad de acuerdo con la hora y el día. Se puede observar el recorrido bidireccional de la ruta escogida para el análisis en la Fig. 2.

La información de la red fue importada desde la base de datos de OpenStreetMap cuya plataforma de mapas es de libre acceso y edición. Las redes de carreteras digitales disponibles son originalmente utilizadas con fines de navegación, por tanto, carecen del grado de detalle necesario para las simulaciones microscópicas de tráfico por carretera. Además, presentan problemas como errores en el número de carriles, sentido de circulación, paradas de transporte público, posición y lógica de los semáforos y, preferencias en las intersecciones, etc. En consecuencia, además de las técnicas heurísticas que se utiliza en SUMO para solventar parcialmente estos errores, se torna esencial la revisión y acondicionamiento manual de la red por parte del usuario de acuerdo con su necesidad. En la Fig. 3 se muestra una comparación entre la red vial real en una fotografía satelital y su modelamiento en la aplicación gráfica SUMO-GUI.

La demanda de tráfico es generada aleatoriamente en base a escenarios representativos de los niveles de servicio del flujo vehicular descritos en el Manual de capacidad de carreteras del Consejo de investigación del transporte de Estados Unidos. En donde se establece 6 niveles de calidad de servicio de transporte relacionados con la velocidad y tiempos de desplazamiento, libertad de maniobra, interrupciones y comodidad de los trayectos [8].
Los niveles de servicio (NS) denominados: A, B, C, D, E, y F se definen en orden de mejor a peor, es decir el nivel A corresponde a un tráfico fluido con velocidades altas, mientras el nivel F corresponde a circulación muy forzada, velocidades bajas y en general una absoluta congestión en las vías condición muy normal en vías importantes a hora pico de grandes ciudades. En virtud de estos niveles se han planteado los escenarios descritos en las Tablas 2 y 3.
Tabla 2. Escenarios de servicio vehicular en análisis de sensibilidad de altura
| Esc | Ocupación (%) |
|---|---|
| 1 | 20 |
| 2 | 100 |
Tabla 3. Escenarios para servicio vehicular en análisis de sensibilidad de tráfico
| Esc | NS | Tráfico | Conteo | Factor de paso | Ocupación (%) |
|---|---|---|---|---|---|
| 3 | A | Ligero | 1 | 2 | 20 |
| 4 | C | Moderado | 6 | 3 | 60 |
| 5 | F | Intenso | 12 | 5 | 100 |
El parámetro conteo representa el número de vehículos que se generan aleatoriamente por hora, carril y kilómetro. El factor el paso de tráfico representa el nivel de intercambio de vehículos entre la zona de estudio y el exterior.
SUMO es un software de simulación de tráfico puramente microscópica. Cada vehículo está definido explícitamente por un identificador único, su hora de salida, llegada y la ruta a través de la red. Las rutas de transporte público bajo análisis se modelaron considerando su trayecto real, velocidad máxima de circulación, localización de las paradas y tiempo de espera en las mismas. Los buses se modelaron considerando su nivel de ocupación en cada escenario de las Tablas 2 y 3.
DESCRIPCIÓN DEL CASO DE ESTUDIO
El propósito práctico del presente estudio es modelar una ruta típica de transporte público en la ciudad de Quito para el análisis dinámico del consumo de energía bajo condiciones reales. Se ha modelado la ruta Marín - Ciudadela Tarqui cuyo perfil topográfico se muestra en la Fig. 4.
La información topográfica se obtuvo del Servicio Geológico de Estados Unidos (USGS) [9], que provee los archivos SRTM necesarios para conocer la elevación de cualquier punto sobre la tierra con una resolución de 30m. El archivo SRTM es un modelo digital de elevación que maneja un sistema de coordenadas geográficas WGS84 y EGM96.
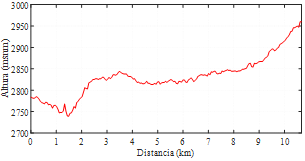
Los modelos digitales de elevación representan visual y matemáticamente los valores de altura con respecto al nivel del mar, y permite caracterizar el relieve de una zona. Intersecando los datos tipo ráster de la elevación y el trazado de las rutas de transporte bajo estudio se obtuvo la composición topográfica necesaria para el análisis de energías en vehículos eléctricos.
ESTIMACIÓN DEL CONSUMO Y ANÁLISIS DE SENSIBILIDAD
Uno de los parámetros más importantes al adquirir un vehículo eléctrico es su autonomía, cuyo valor teórico es declarado en las especificaciones del fabricante. En teoría, un VE ideal puede recorrer entre 150 y 200 kilómetros con una sola carga, sin embargo, en la práctica la autonomía real de un bus eléctrico de transporte público depende de muchos factores energéticos internos y externos. El desempeño de las baterías depende además de variables ambientales como la temperatura, constructivas como tolerancias en la construcción y variables mucho más difíciles de especificar con precisión, como el tiempo y el tipo de uso (o mal uso) que se haya hecho de la batería en el pasado [10]. En tal sentido la autonomía real de los buses que se incorporarán al servicio de transporte público en la ciudad de Quito debe estimarse considerando al menos las principales variables en cuestión.
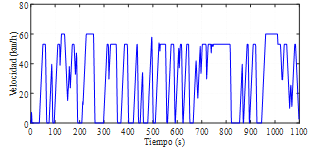
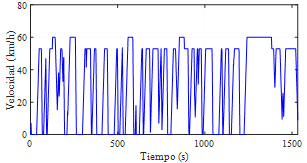
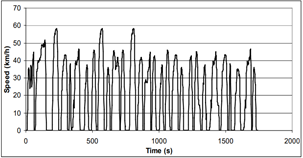
En el presente trabajo se analiza la sensibilidad del balance de energía (consumo-regeneración) de buses eléctricos pertenecientes a una ruta real de la ciudad de Quito. En la Fig. 5 se muestra la velocidad del recorrido del bus en una simulación sin considerar diferencias de altura en la ruta, mientras en la Fig. 6 se puede observar el comportamiento del bus con la inclusión de los datos de relieve en la ruta.
Los ciclos de conducción simulados y mostrados en las Fig. 5 y 6 son similares a los patrones de conducción NEDC (New European Driving Cycle) y ETC (European Transient Cycle). Los mismos son utilizados para la homologación de emisiones en vehículos de combustión y autonomía de modelos de vehículos eléctricos en la Unión Europea. En la Fig. 7 se puede observar dichos ciclos estándares de manejo de buses de transporte urbano y que guarda semejanza con los ciclos simulados en este trabajo. Un ciclo de conducción adecuado para simular debe contar con periodos de aceleración, desaceleración y velocidad constantes, guardando relación con las pautas reales de conducción dentro de una ciudad.
El desempeño de los buses eléctricos simulados se muestra en las figuras siguientes, considerando el desnivel y el nivel de tráfico de la ruta, así como la ocupación de los buses. En la Fig. 8 se muestra bajo el escenario 1, es decir con un 20% de ocupación, el comportamiento de la carga de la batería del bus eléctrico con y sin desniveles en la ruta. La Fig. 9 contiene los resultados del escenario 2 según las mismas consideraciones de la figura anterior.
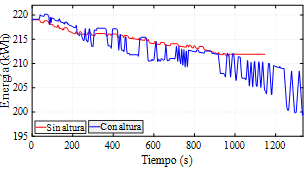
Figura 8: Energía acumulada por el bus eléctrico en la ruta de prueba con un 20% de ocupación, considerando desniveles
La incidencia del nivel de tráfico en el consumo de energía se detalla mediante la Fig. 10. Se han simulado los escenarios 3,4 y 5 especificados en la Tabla III, pudiéndose notar a diferencia de lo ocurrido con el desnivel, la poca dependencia entre el nivel de tráfico y la magnitud del consumo energético.
Finalmente se modela la ruta considerando los desniveles de altura y tráfico, con esto se espera conseguir un desempeño energético muy cercano a la realidad. En la Fig. 11 se muestra el comportamiento del bus eléctrico, a partir del cual podemos analizar su autonomía real que bajo las condiciones simuladas se reduce un 27% con respecto a la autonomía declarada por el fabricante.
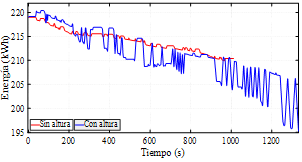
Figura 9: Energía acumulada por el bus eléctrico en la ruta de prueba con 100% de ocupación, considerando desniveles
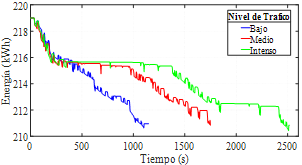
Figura 10: Energía acumulada por el bus eléctrico en la ruta de prueba considerando niveles de tráfico
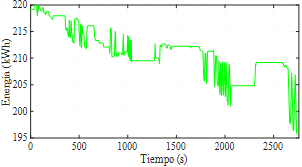
Figura 11: Energía acumulada por el bus eléctrico en la ruta de prueba considerando desniveles y nivel de tráfico medio
Con el fin de validar los resultados obtenidos se realiza un análisis comparativo entre el desempeño energético de la ruta simulada en SUMO con las investigaciones detalladas en [12] y [13]. Ambos trabajos realizan una evaluación del consumo energético para vehículos eléctricos en función de variables propias del vehículo y las condiciones de la ruta.
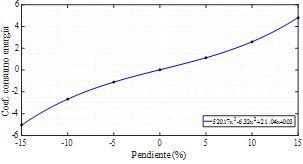
En [12] se encuentra un modelo para estimar el impacto del grado de inclinación de la ruta en el consumo de energía de un vehículo eléctrico. Aplicando el modelo logarítmico al caso de estudio se puede obtener resultados coherentes con los de la Fig. 12. En [13] se establece una relación entre diversos factores que afecta el consumo de energía en un VE. Considerando los factores: inclinación y longitud de la ruta, ocupación y velocidad se presentan resultados coherentes con la bibliografía, estimándose un error del consumo de energía del 8,78%. Por otro lado, a pesar de que, de acuerdo con la bibliografía, las condiciones de tráfico afectan sensiblemente el consumo del VE, las simulaciones realizadas no reflejan tal hecho. Experimentalmente cuando la proporción de tiempo de parada del vehículo durante un viaje pasa del 12% - 18% al 24% - 30%, el consumo energético del vehículo aumenta un 20% [13,14].
En base al análisis comparativo de resultados se puede comprobar que el modelo propuesto en [2,15] y aplicado en las simulaciones de SUMO del presente trabajo, no permite evaluar adecuadamente la incidencia del tráfico en el comportamiento energético del VE. Esto concuerda con lo expuesto en [5], donde se menciona que, bajo condiciones de congestión vehicular, la estimación de consumo resultante en SUMO es inferior a la energía real consumida en carretera, esto debido a que no se toma en cuenta de forma precisa el efecto de la aceleración en el consumo de batería. Por tanto, las simulaciones realizadas desestiman el consumo de energía bajo condiciones de tráfico, lo cual se puede constatar en la Fig. 10.
CONCLUSIONES Y RECOMENDACIONES
A partir de la programación del modelo en SUMO, la creación de los modelos de ruta, bus eléctrico, tráfico, y topografía, se ha logrado modelar y simular exitosamente el comportamiento de un bus eléctrico en una ruta de transporte público real, comprobando el nivel de sensibilidad entre la energía consumida en función de la longitud y desnivel de la ruta, el peso bruto y la velocidad de desplazamiento del vehículo. Al analizar la incidencia de la combinación de estos parámetros, se ha estimado un nivel de error del 8,78% con respecto a las experimentaciones descritas en la bibliografía. Por tanto, con base al modelo y simulaciones propuestas, se puede estimar la autonomía de un bus eléctrico en cualquier ruta de transporte público con una adecuada exactitud.
La metodología propuesta resulta muy útil para futuros trabajos de análisis energético como: dimensionamiento y optimización de la capacidad de estaciones de carga, estimación de la demanda eléctrica de estaciones de carga y su impacto en la red de distribución de energía, planificación de rutas de transporte, análisis operativo de tecnologías de carga, autonomía de unidades de transporte y degradación temporal de baterías, entre otros.
Existe una gran diversidad de factores que influyen en el consumo energético de un vehículo eléctrico, en el presente trabajo se estima la magnitud de incidencia de varios de ellos simulando una ruta real de transporte público. Sin embargo, la evaluación de ciertos factores como el nivel de tráfico requiere de modelos más complejos que aún siguen siendo investigados.
Si bien el software SUMO es una valiosa herramienta para la realización de simulaciones de tráfico, al usar un modelo cuasi estacionario, presenta una significativa limitación para análisis energético de vehículos eléctricos. No obstante, por tratarse de un software de código abierto, es posible mejorar el modelo tomando como referencia los hallazgos presentados en este trabajo. En base a otras investigaciones se podría mejorar el modelo para analizar la incidencia más ajustada del tráfico, la temperatura ambiental, el estado de carga de la batería, el estilo de conducción, etc.
Para evaluar el comportamiento dinámico del consumo energético del bus eléctrico, considerando la incidencia del tráfico vehicular, es necesario considerar la aceleración instantánea además de trabajar con un modelo dinámico de freno regenerativo. La aceleración instantánea tiene directa influencia en el consumo de corriente del motor eléctrico especialmente en condiciones de arranque. Y es precisamente en los escenarios de alto tráfico donde el motor eléctrico se encuentra en un ciclo intenso de aceleraciones y desaceleraciones.
Considerando las limitaciones del modelo implementado en SUMO, se pudo comprobar que la autonomía de un bus eléctrico tiende a ser inferior a la declarada por el fabricante en rutas con altos desniveles y niveles de ocupación, como se comprobó en el caso de estudio de la ciudad de Quito, en donde la autonomía resultante de la simulación se redujo en un 27%. Por ello, es indispensable incluir en los análisis, pruebas de ruta bajo distintas condiciones o considerar un margen de seguridad de al menos el 27% al diseñar un sistema de transporte público eléctrico en esta ruta.
Se debería encaminar esfuerzos para futuros trabajos que permitan ajustar el modelo de bus eléctrico utilizado, mediante pruebas en ruta y/o en bancos de prueba. Se ha mantenido reuniones con la ARCERNNR y el Centro de Transferencia Tecnológica para la Capacitación e Investigación en Control de Emisiones Vehiculares (CCICEV) que posibilite la aplicación práctica y exitosa de esta metodología en el vigente proceso de integración de la movilidad eléctrica en el transporte público del país.

