











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
La energía solar es una fuente de energía limpia, renovable, que no modifica el medio ambiente y sobre todo gratuita, con amplias aplicaciones en los sistemas eléctricos de potencia en general [1] . El veintiunavo estudio del The World Energy Council, menciona que para el año 2100 el 70% de la energía consumida será de origen solar [2]. Para poder producir energía eléctrica, el panel solar no solo depende de la intensidad de la radiación solar que incide sobre el mismo, sino que también depende del ángulo en la que esta llega. Ambas variables son importantes para determinar la producción de energía, la cual se lleva a cabo a través del efecto fotovoltaico. Este efecto es la aplicación del efecto fotoeléctrico de tal manera que se puede generar electricidad por diferencia de potencial entre dos puntos al incidir la radiación electromagnética de la luz sobre un mismo material semiconductor denominado unión p-n. Este efecto se caracteriza por la producción de corriente eléctrica mediante dos materiales, piezas que están en contacto y expuestas a la luz o por lo general, a una radiación electromagnética
El módulo fotovoltaico tiene un comportamiento que sigue una curva denominada I-V, según la cual, en un estado de irradiación solar y de temperatura determinado, el módulo es capaz de generar una curva de tensión- intensidad de una morfología representada en la Fig. 1. [3].
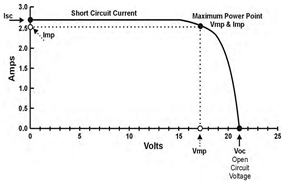
En general el fabricante provee datos operacionales como la tensión de circuito abierto Voc, la corriente de cortocircuito Isc, estos datos están referidos a condiciones estándar de radiación (1000 W/m2) y temperatura de celda (25° C) [4].
Una de las técnicas utilizadas para aumentar la captación de radiación solar y por ende la energía suministrada por la instalación solar fotovoltaica pasa por implementar un dispositivo como lo es un seguidor solar.
Un seguidor solar es básicamente un dispositivo formado por una parte fija y una móvil, cuya finalidad es el aumento de la captación de radiación solar, para esto necesita una superficie de captación que lo mantenga lo más perpendicular posible a los rayos del, dentro de su rango de movimiento [5].
DESARROLLO
Diseño y construcción de parte mecánica del sistema solar (estructura fija y móvil)
La estructura de cada prototipo se elaboró bajo la orientación de proyectos como [6]-[8], de tal manera que sea resistente a fenómenos ambientales que pudieran afectar el funcionamiento eléctrico y mecánico. Para el caso de los seguidores de un eje, se determinaron los siguientes requerimientos de diseño:
Se necesita el movimiento libre en un eje (este a oeste) y así mismo poder establecer una inclinación fija, según la localidad.
La base principal será de un solo poste fijo al lugar de instalación.
La estructura debe soportar el peso del panel fotovoltaico de 120W (22,5 Voc-7,2 A Icc) con dimensiones de 670*970*30 mm, para este caso 6,5kg.
El panel realizará su movimiento mediante un motor eléctrico en conjunto con un tornillo de potencia el cual convertirá el movimiento rotacional a movimiento lineal, otorgando mayor fuerza y precisión al movimiento del panel solar

La estructura que sujeta el panel fotovoltaico debe tener la capacidad de girar en un eje, este tiene que moverse de una manera muy suave y con el coeficiente más bajo de rozamiento para evitar posibles atascamientos y desgastes producidos en la acción. La idea principal del diseño se detalla en la Fig. 3.
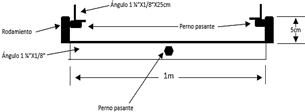
Para efectuar el movimiento, el eje del motor eléctrico estará unido a un perno sin fin y así mismo, una tuerca introducida en un tubo se desplazará a lo largo del perno haciendo el recorrido, convirtiendo el movimiento rotacional a lineal [9]. Se utilizó un motor paso a paso NEMA23, esto se lo aprecia en la Fig. 4.

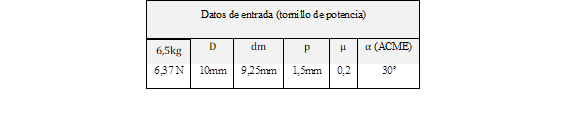
Teniendo los datos de entrada, se realizaron los cálculos para determinar el torque del motor a implementar para elevar y descender la masa del panel colocado sobre un eje de rotación, (para este caso, se contempla la elevación como el momento más crítico). El par para un tornillo de potencia, en este caso (con rosca ACME o rosca unificada sin collarín) se expresa mediante (1).

Por consiguiente, utilizando los datos de la Tabla 1, se reemplazan los valores y obtenemos el valor que se observa en (2).

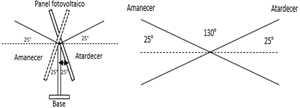
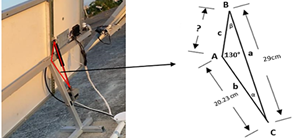
En el movimiento de este a oeste, debido a limitaciones de diseño, la estructura posee 130º libres de recorrido, lo cuales deberán ser proporcionales a un numero de vueltas del perno sin fin. Lo antes mencionado se muestra en la Fig. 5.
En la Fig. 6, observamos los valores de los lados “a y b”, donde “a” es la medida que forma el actuador lineal en su punto de máximo de estiramiento (o cuando el panel se encuentra a 25º de inclinación tal y como se muestra en la fig. 5). Por otra parte “b” es la distancia que hay desde el origen del perno sin fin (tomado como referencia) hasta donde se interceptan las estructuras de la base y la encargada de sostener el panel fotovoltaico. Finalmente, la distancia “c” es importante conocerla para la correcta instalación del segundo punto de apoyo del actuador lineal.
Proponemos la solución a este problema mediante la ley del seno para triángulos oblicuángulos. Inicialmente no tenemos el ángulo "α", con lo cual:
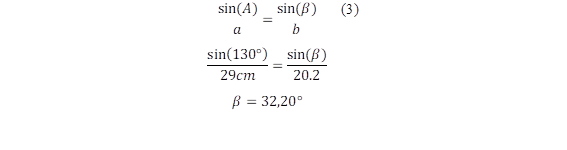
Por lo tanto:

Entonces:

Por consiguiente, “c” debe tener una distancia de 11.57cm para que el panel fotovoltaico recorra los 130º.
Para encontrar la relación entre centímetros recorridos vs grados de inclinación se recurre a plantear el triángulo de la Fig. 7.
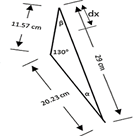
Mediante la ley de coseno buscamos la solución para este problema, entonces se resuelve se la siguiente forma:
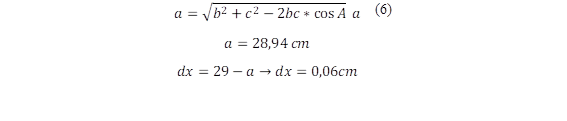
Finalmente se determina que por cada 0,6mm de movimiento lineal, el panel aumenta o disminuye 1º en su inclinación. El paso del tornillo utilizado en el actuador lineal es de 1,5mm, entonces se concluye que por cada vuelta completa del motor eléctrico moverá 2,5º al panel fotovoltaico.
Diseño electrónico general de los seguidores solares y panel fijo.
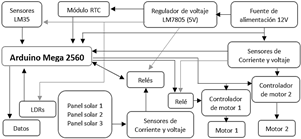
Se utiliza principalmente un Arduino Mega 2560, el cual será el encargado de gestionar señales de E/S y ejecutar acciones para el correcto funcionamiento del sistema, también será quien administre la información de temperatura y potencia entregada por los seguidores solares, así como el panel que se encuentra en una posición fija. El diagrama de funcionamiento del sistema se muestra en la Fig. 8.
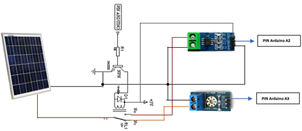
Para obtener la potencia eléctrica que están entregando los paneles solares a lo largo del día, se optó por el uso de relevadores, quienes conmutaran los sensores mediante un pulso proveniente del Arduino durante un tiempo determinado (9,5 Seg.), colocando en CC y CA cada panel para conseguir los parámetros de “Voc y Icc”, luego mediante la programación en Arduino se obtiene la potencia, esto se detalla en la Fig. 9.
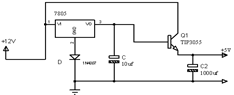
Para el funcionamiento de los sensores y demás componentes, se necesita un voltaje estable de +5V, por lo que, se implementó un regulador de voltaje LM7805 en conjunto con un transistor de potencia, el cual manejara la corriente que circule por el circuito y así evitar la quema del regulador debido al bajo amperaje que este puede manejar (500mA). A continuación, se muestra en la Fig. 10
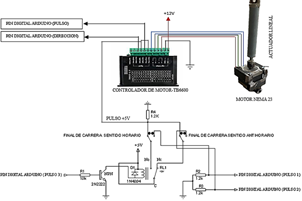
El motor eléctrico para los dos tipos de seguidores actuará con dirección de giro y número de vueltas, aumentando o disminuyendo la longitud del actuador lineal. Cuando el panel llegue a los limites en cada extremo “0° y 130°”, el circuito parará la secuencia debido al accionamiento de los finales de carrera y luego de esto invertirá el giro del motor, tal y como se muestra en la Fig. 11.
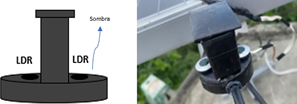
Diseño de seguidor solar por sensores LDR.
El circuito seguidor por punto luminoso tiene que detectar el desequilibrio de luz entre las dos fotorresistencias que controlan la posición del panel. Se detalla el dispositivo de censado en la Fig.12
Cuando las señales provenientes de estos sensores determinen que el panel no está orientado perpendicular al sol, el circuito realizara la acción de enviar una señal que activara el motor eléctrico encargado de posicionar el panel, esto se lo representa en la Fig. 13

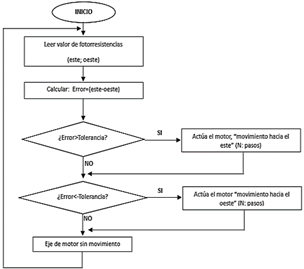
La señal emitida por los sensores de luz es enviada a los pines analógicos del Arduino mega y este tendrá la tarea de leer el voltaje que viajará según la intensidad de la luz receptada por los LDRs, para después hacer la comparación entre ambos valores mediante el código de programación y así enviar la señal hacia los motores, tal y como se muestra en el diagrama de flujo de la Fig. 14
Diseño de seguidor solar por programación astronómica.
Para el desarrollo de este seguidor se utilizó la misma estructura que el seguidor por punto luminoso; la única diferencia es que este no requiere sensores de luz adicionales debido a que su funcionamiento se basa en cálculos predecibles.
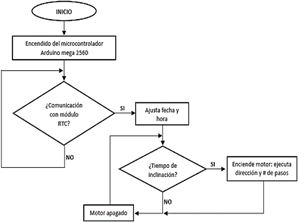
Este seguidor solar utiliza una programación astronómica para determinar el ángulo de orientación del panel solar en función de la posición del sol en el cielo por lo que es importante conocer datos como hora del día, fecha, latitud y longitud para calcular la posición exacta del sol en el cielo en un momento dado. Entonces el diagrama de flujo el cual representa la secuencia de toma de decisiones para el seguidor solar por programación astronómica se lo aprecia en la Fig.15
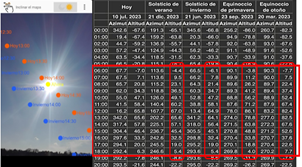
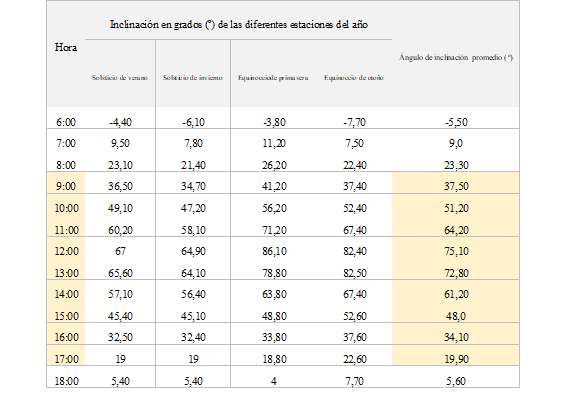
Para determinar el número de pasos del perno sin fin vs la inclinación (en grados) del panel se usa la aplicación de Android “El camino del sol”. Esta aplicación muestra la posición y la trayectoria del sol sobre la localidad donde se encuentra instalado el panel fotovoltaico (en este caso Manta-Ecuador) [10]. Con esta información podemos establecer un rango de 12 horas, que va desde las 6:00h AM hasta las 18:00H PM de las diferentes estaciones del año, esto se lo observa en la Fig. 16
Como se aprecia en la Tabla 2 con la información de la Fig. 15, se realizó un promedio de los ángulos de inclinación pertenecientes a las diferentes estaciones del año en función de las horas seleccionadas. Considerando que la inclinación inicial y final del panel es de 25º se establece el rango de funcionamiento desde las 9:00h AM hasta las 17:00h PM.
En el controlador del motor (TB6600) se elige una configuración de 3200 pasos por vuelta completa del eje del motor, ya que se necesita un movimiento suave, fuerte y preciso. También se configura la corriente que se va a entregar al motor para su funcionamiento, esto tomando en cuenta los datos del fabricante. Se puede observar en la Fig. 17

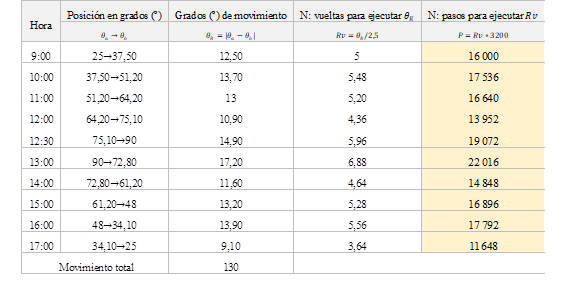
Teniendo esta información (2,5° por vuelta; 3200 pasos por vuelta), utilizando una regla de tres podemos determinar el número de pasos necesarios para corregir la inclinación del panel según las horas del día como se muestra en la Tabla 3.
Diseño de panel fijo.
El ángulo de inclinación óptimo de un panel solar fijo es generalmente igual a la latitud local [11]. Dado que la latitud del Ecuador es aproximadamente 0 grados, se recomienda un ángulo de inclinación de alrededor de 0 grados. Esto significa que el panel solar fijo se debe instalar de manera horizontal, paralelo al suelo.
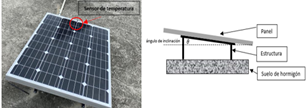
El panel fotovoltaico reposara sobre una estructura fija con una inclinación de 5 grados, esto para evitar la acumulación de lodo, producto de la mezcla del polvo y agua, considerando los criterios antes mencionados. Dicho panel estará conectado a los sensores de corriente, voltaje y temperatura, que a su vez hacen conjunto con la etapa de conmutación para el proceso de lectura de datos realizado por el Arduino mega, tal y como se lo realizo en los sistemas de movimiento, esto se lo aprecia en la Fig. 18
EVALUACION DE LOS RESULTADOS
En los predios de la Universidad Laica Eloy Alfaro de Manabí (ULEAM) se encuentra instalada una estación meteorológica automática que permite monitorear la dirección y velocidad del viento, así como la los datos de radiación de la zona. Los datos se exportaron en intervalos de 2 minutos a la plataforma Web (IoT) de Ubidots, esto mediante la incorporación de una Ethernet shield con la finalidad poder visualizar los valores de potencia y temperatura en tiempo real. En la MicroSD los datos se guardaron después de realizar el producto de mediciones promedio de los paneles FV “Icc y Voc” (cada 20 segundos), de igual forma la potencia consumida por los sistemas de movimiento en un eje medida por sensores independientes, esto con la finalidad de tener una mayor precisión en el estudio. En la Fig. 19, se observa que ambos sistemas fueron colocados a pocos metros de la estación meteorológica.
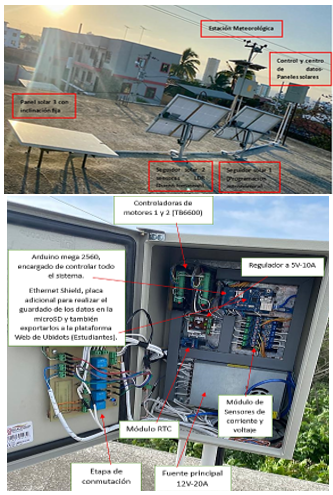
Figura 19: Sistema FV y estación meteorológica instalados en la ULEAM. Tablero general de conexiones del hardware de los sistemas fotovoltaicos
El análisis de rendimiento de producción se lo realizo diariamente, a partir desde el momento de la instalación (durante 16 días).
La Tabla 4 muestra los datos de radiación solar de la zona durante el tiempo de estudio, también de la energía extraída de cada sistema solar como lo son: el sistema de seguimiento por programación astronómica (SFV1), sistema de seguimiento por punto luminoso o sensores LDR (SFV2) y sistema solar fijo (SFV3). Desde el SFV1 la producción de energía eléctrica total en los días de estudio fue de 9,46 kWh respectivamente. Por consiguiente, desde el SFV2 la producción de energía eléctrica fue de 9,96 kWh respectivamente. Por su parte, desde el SFV3 la producción de energía eléctrica fue de 7,19 kWh respectivamente. La fig. 20 muestra la comparación de las curvas características de energía eléctrica de cada sistema FV y también la radiación de la zona. Esto demuestra que sistema estuvo liderando la producción en comparativa al sistema FV fijo.
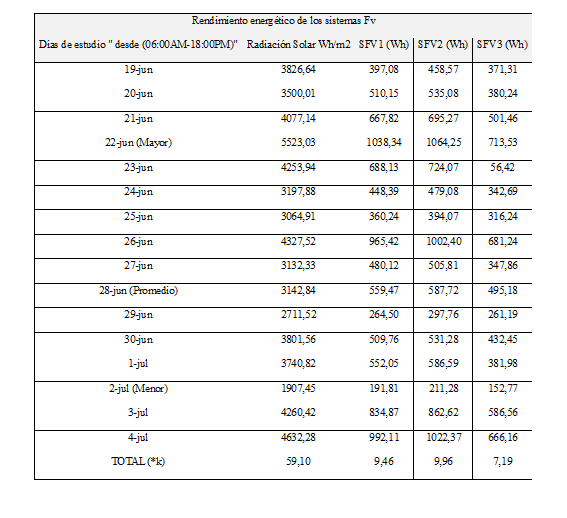
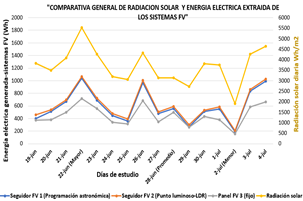
Figura 20: Comparativa general de las curvas características de radiación solar y energía extraída de los sistemas fotovoltaicos por día
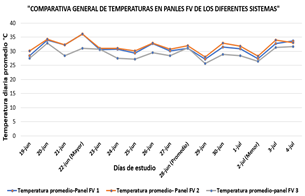
La Tabla 5 muestra los valores de temperatura promedio alcanzados por los paneles de cada sistema FV, testeados por los sensores de temperatura (LM35) que fueron colocados sobre el panel. También se encuentran los valores del consumo de los motores eléctricos NEMA23 durante las horas de funcionamiento en el trayecto de los días de estudio, colocados en los SFV1 y SFV2. La fig. 21 muestra la comparativa de las curvas características de temperatura promedio por día de cada panel que conforman los diferentes sistemas FV.
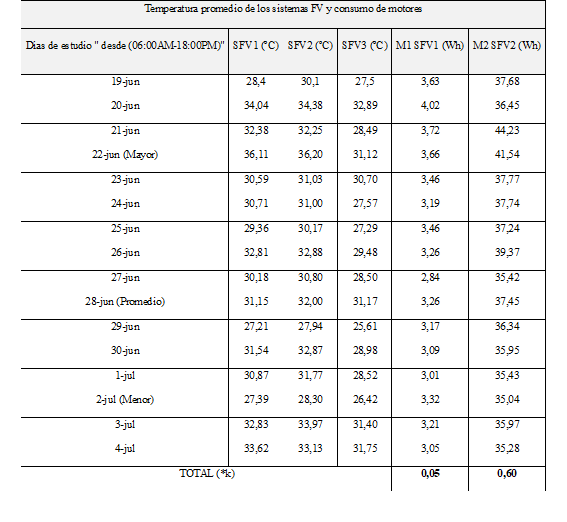
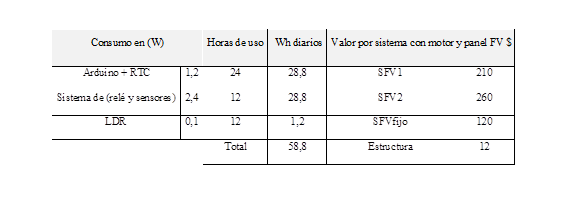
La Tabla 6 muestra el consumo promedio de los componentes electrónicos que conforman el sistema, determinado por su “datasheet” y horas de uso, consumo que se suma al consumo de los motores para el análisis.
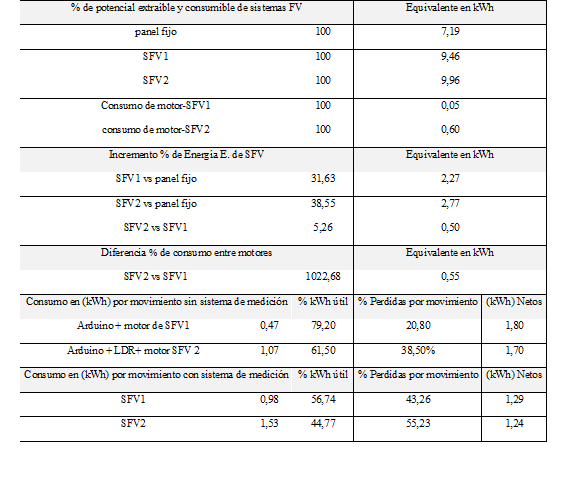
La Tabla 7 muestra los datos del estudio global de los sistemas fotovoltaicos, en donde se analiza la producción de los seguidores solares (SFV1 y SFV2) respecto al panel fijo, contemplando las pérdidas que tiene cada uno por el movimiento realizado para corregir la posición del panel para mantenerlo perpendicular al sol. Se propuso dos escenarios para el análisis, con el sistema de medición de potencia (circuito de conmutación) incorporado para la investigación y sin este. Por consiguiente, el SFV1 obtuvo una producción energética total de 9,46 kWh, superior en un 31,63% (2,27 kWh extra) a la producción del panel fijo quien tuvo una producción energética total de 7,19 kWh. De esos 2.27 kWh, el SFV1 pierde alrededor del 20,80% al corregir la posición del panel FV, aprovechando netamente 1,8 kWh, equivalentes a 25% (este análisis sin el sistema de medición) y con el sistema de medición pierde alrededor del 43,26% quedando con un rendimiento adicional neto de 1,29 kWh, equivalentes a un 18%.
Por consiguiente, el SFV2 obtuvo una producción energética total de 9,96 kWh, superior en un 38,55% (2,77 kWh extra) a la producción del panel fijo quien tuvo una producción energética total de 7,19 kWh. De esos 2.77 kWh, el SFV2 pierde alrededor del 38,50% al corregir la posición del panel FV, aprovechando netamente 1,7 kWh, equivalentes a 24% (este análisis sin el sistema de medición) y con el sistema de medición pierde alrededor del 55,23% quedando con un rendimiento adicional neto de 1,24 kWh, equivalentes a un 17%.
CONCLUSIONES
Una vez finalizada la presente investigación se ha llegado a las siguientes conclusiones:
Mediante el uso de los seguidores solares se obtiene un incremento en la captación de energía solar de un 31,63% para el SFV1 y 38,55% para el SFV2 lo que representa un 2,27 y 2,77 kWh superior al rendimiento del panel solar fijo durante los días de estudio según la tabla 7.
Debido a la capacidad de ajustar su posición en función del ángulo óptimo de incidencia solar a lo largo del día, los seguidores FV en un eje presentan una mayor eficiencia en la captación de energía solar en comparativa con el sistema solar fijo, siendo hasta 25% más eficiente el SFV1 y 24% el SFV2 (considerando las pérdidas de energía en ambos casos) tal y como se lo muestra en la Tabla7. Esto es muy importante ya que el sistema SFV2 tiene un costo superior al SFV1 según la Tabla 6, por lo tanto, resulta más conveniente el SFV1 por obtener casi los mismos valores porcentuales de extracción energética.
Mientras que el seguidor solar por sensores LDR es quién más porcentaje de producción adicional consigue, también es quién más energía pierde en el movimiento ya que su motor siempre está activo y el SFV1 solo ejecuta movimientos en las horas programadas, quedando así con un porcentaje de energía levemente superior. Como se muestra en la Tabla 4, el sistema de rastreo justifica su uso en lugares donde existe un índice continuo de buena radiación solar, tal y como se lo demostró en el día 22 de junio, mientras que en lugares donde el índice de radiación es bajo y escaso no se justifica el uso de estos sistemas, ya que la diferencia de producción es despreciable según se observa en el día 2 de julio.

