











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
El cambio climático, el crecimiento poblacional y el avance tecnológico han permitido la introducción de energías renovables (RES) en los sistemas eléctricos convencionales. Esto ha contribuido al crecimiento de la cobertura del servicio eléctrico en varios puntos remotos y en los diferentes centros de carga en los cuales no es viable ampliar la estructura de las subestaciones. Sin embargo, la introducción de estas energías también plantea desafíos en la operación, planificación y el control de la red eléctrica [1], [2].
Uno de los principales desafíos que se presentan en la utilización de energías renovables es la variabilidad del clima, lo que introduce cierta incertidumbre al sistema debido a que los pronósticos meteorológicos no son completamente precisos y pueden cambiar rápidamente en un determinado momento [3].
La introducción de las energías renovables ha dado lugar a la creación de Micro-redes (MR), que son sistemas más pequeños que incluyen recursos energéticos distribuidos (DER), cargas y sistemas de almacenamiento. Estas Miro-redes pueden operar conectadas o aisladas de la red principal de forma independiente [4].
Para mitigar los efectos negativos de la integración de las energías renovables en los sistemas convencionales, se pueden utilizar estrategias de control en los diferentes dispositivos para acoplarlos de manera más eficiente a la red [5].
La arquitectura de control de una MR puede dividirse en centralizado y distribuido, de acuerdo con la presencia o no de una red de comunicación.
En el modo de operación aislado, la MR debe proporcionar energía al consumidor final con los mismos parámetros de calidad que la red [6]-[8]. También puede operar de manera conjunta con la red principal, intercambiando energía de forma unidireccional o bidireccional mediante un convertidor AC/DC [6]-[10]. Este convertidor bidireccional de enlace, “bidirectional AC/DC interlinking converter” es un dispositivo que se puede utilizar en el control jerárquico de las Micro-redes [9].
La fuente de voltaje máximo se adopta como el método de control de caída para gestionar las operaciones en paralelo de las Generaciones distribuidas (GD) despachadas para lograr un intercambio de energía sin comunicación.
Refiriéndose a la generación distribuida se debe tomar en cuenta que estas redes pueden generar incertidumbre e inyectar armónicos, las cuales afectan al balance y la eficiencia de la red eléctrica, debido a que se generarán pérdidas lo que reduciría la calidad de energía.
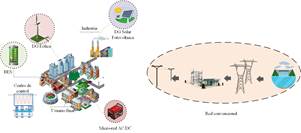
En la Fig. 1, se observan diferentes tipos de cargas (comerciales, residenciales, industriales) las cuales al principio solían operar únicamente con una generación centralizada, en este caso las hidroeléctricas.
Posteriormente se añadieron generaciones distribuidas convencionales y no convencionales como paneles fotovoltaicos, generadores de diésel. Estos generadores mejoran el abastecimiento de energía eléctrica en los centros urbanos, donde normalmente se presenta el mayor consumo de energía. El éxito de las MR radica en un sistema de control capaz de alcanzar los voltajes y potencias requeridas.
Las MR al estar cerca de los centros de carga reducen costos por transmisión y reducen totalmente las pérdidas por transporte de energía [11]. En las MR debido a la diversidad que tienen en generaciones, cargas y sistemas de almacenamiento se puede tener corriente AC Y DC. Entre los elementos que incluyen las MR se encuentran las celdas fotovoltaicas, celdas de combustible y sistemas de almacenamiento que proveen potencia DC. Por otro lado, las microturbinas y algunos tipos de generación eólica producen potencia AC, de 50 Hz o 60 Hz, lo cual depende netamente de la región en la que se está operando [3], [12]-[14].
Haciendo una comparación entre las MR con las tecnologías convencionales, como, por ejemplo, las redes de energía centralizadas. La MR provee mayor confiabilidad, eficiencia y permite contrarrestar problemas medioambientales [1], [16] Además, que el cliente tiene la posibilidad de interactuar activamente en algunas etapas del Sistema Eléctrico de Potencia (SEP). La desventaja de una MR es el grado de complejidad del diseño y control, ya que para mejorar la confiabilidad de la MR se deben implementar diferentes técnicas de control.
No obstante, el control de MR exige una red de comunicación con un ancho de banda muy alto para la correcta transferencia de datos [17].
Cuando se produce una falla, el punto de conexión común (PCC, por sus siglas en inglés) permite la interrupción del flujo de energía, entre la MR y la red convencional [9]. El sistema debe ser capaz de retornar a su operación normal en el menor tiempo posible. En este punto es donde las estrategias de control juegan un papel crucial para el funcionamiento exitoso de las MR.
La estrategia de control debe considerar las características de la MR y los objetivos planteados para ella. En este sentido, debe tomar en cuenta sus características inherentes, donde se debe analizar la mejor estrategia de control que se ajusta a las necesidades de control del sistema. Control de voltaje, frecuencia, potencia, fallas, sincronización de frecuencia, control de la forma de onda del transitorio de voltaje y corriente, entre otros [9].
El control de potencia se lo realiza de manera secundaria, para ello se requiere de un control jerárquico. El control de frecuencia afectará la potencia activa y el control de voltaje afectará la potencia reactiva [10].
Entre los dispositivos empleados para el control jerárquico de la MR, se espera que el inversor ayude con el soporte de voltaje AC/DC al cambiar el modo de operación de despacho de potencia a regulación de voltaje cuando la fuente de voltaje principal en cualquiera de los nodos falla abruptamente [5], [18], [19]
Existen diversas técnicas de control utilizadas para mejorar la operación de las MR. Algunas de estas técnicas son la impedancia virtual, el control droop, el inductor eléctrico (ES), el control de tolerancia de fallos, entre otras. Estas técnicas han demostrado resultados satisfactorios en cuanto a la relación establecida en la comparación de la potencia y la estabilidad del voltaje [20]-[22]. El esquema de control basado en el control de caída estático en una MR permite el intercambio de potencia y la regulación.
El control droop es una técnica que permite controlar de manera ideal las MR aisladas, ya que no requiere una red de comunicación, lo que mejora la confiabilidad y reduce la complejidad del sistema [20]-[22].
Las MR son de gran interés en la investigación de redes, en [22] se efectúa el diseño de sistemas de control, controladores PI, empleando diagramas de bode, en donde se pretende verificar la respuesta de frecuencia, y aumentar la robustez del sistema.
El objetivo del control robusto según [23]-[25] es extraer las características de incertidumbre del modelo y aplicar esa información al diseño del sistema de control.
En [26] el control robusto convencional modifica para asegurar una compartición de carga proporcional. Esta estrategia resalta la robustez del sistema frente a errores numéricos, perturbaciones, ruidos e impedancias de alimentadores, teniendo en cuenta únicamente errores en la medición de voltaje.
El control deslizante (SMC, por sus siglas en inglés) y el modelo de referencia en lazo cerrado las cuales aumentan la estabilidad, robustez y rendimiento por medio de su estrategia [27].
En [28] se analiza la estabilidad de una Micro-red híbrida, y se propone un control dinámico de ganancia de caída para manejar los cambios de las RES y mantener la estabilidad de la MR.
El uso de sistemas de almacenamiento tiene como objetivo mejorar la estabilidad, calidad de potencia, confiabilidad en toda la MR.
En [18] se propone una estrategia de control jerárquico para la operación de la MR. Esta estrategia se desarrolla en los niveles: interno, primario y secundario, con el fin de regular la salida de voltaje del inversor, compensar la desviación del voltaje y garantizar el funcionamiento de la red en todos los modos.
El autor de [11] menciona que para el análisis de MR se ha implementado el consorcio [9] de tecnología de electricidad confiable, además de modelos establecidos como los de CIGRE o IEEE.
METODOLOGÍA
El escenario de esta investigación se basa en el modelamiento de una red DC/AC que consta de dos fuentes de generación distribuida fotovoltaica operando de manera aislada a la red principal.
La MR propuesta está compuesta por dos fuentes PV, que están formado por un arreglo de celdas, inversores DC-DC y DC/AC. El modelo propuesto es adaptado de una MR en [18], pero se adapta a las modificaciones del sistema, incluyendo mayores cargas para explorar y analizar diferentes casos de estudio.
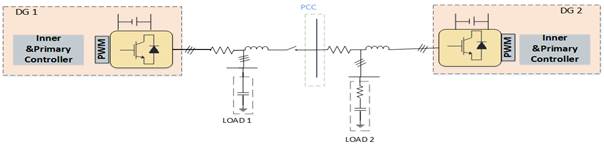
En la Fig. 2 se puede observar dos fuentes de generación distribuida independientes conectadas al mismo punto PCC, donde la micro fuente será representada como una fuente DC conectada a un conversor de voltaje, Además de dos diferentes cargas trifásicas conectadas al sistema. Gracias al PCC el sistema podría trabajar de manera aislada o conectada a la red, donde la potencia activa y reactiva se expresa como en las ecuaciones 4 y 5.
El control de fuentes de energía renovable realizado a través de electrónica de potencia implica el uso de uso de dispositivos electrónicos para gestionar y optimizar la generación de energía. Al implementar energía solar fotovoltaica se necesita el empleo de los inversores fotovoltaicos que convierten la corriente continua (CC) en corriente alterna (CA) a través de elementos electrónicos y configuraciones que permiten la regulación de la tensión y frecuencia de salida, de igual manera con la implementación de algoritmos de seguimiento del punto de máxima potencia (MPPT) [30]. El control electrónico implica el uso de microcontroladores, sensores, algoritmos de control y comunicación para garantizar un funcionamiento eficiente, seguro y confiable de las instalaciones de energía renovable. La electrónica de potencia desempeña un papel clave en la conversión y control de
la energía en estas aplicaciones. Se muestra un sistema trifásico con cargas trifásicas. El sistema presentado es balanceado.
El control de la micro red se realiza con un esquema jerárquico que tiene múltiples lazos de control que se distribuyen en diferentes niveles de control [10]:
Nivel 0 control interno: este nivel controla y regula la salida de voltaje y corriente de los inversores de voltaje (VSI).
Nivel 1. Control primario: control local que proporciona potencia compartida entre las GD y mitiga la corriente circulante que aparece cuando las VSI operan en paralelo.
Nivel 2. Control secundario: cuando la potencia compartida alcanza el control primario la frecuencia y la amplitud del voltaje debería desviarse de los valores nominales. El control secundario es necesario para restaurar el voltaje de la micro-red.
Nivel 3 control terciario: es el último y más lento control, responsable de programar la potencia de cada GD. Un objetivo de este control es la operación optima durante el modo aislado y un óptimo flujo de potencia al estar conectado a la red.
A continuación, se explica la capacidad de mantener precisa la compartición proporcional de carga y por lo tanto la robustez con respecto a parámetros de desviaciones, desajustes de componentes y perturbaciones.

De la ecuación 1 el lado izquierdo es el mismo para todos los inversores que operan en paralelo.

Lo que garantiza una precisa compartición de potencia real sin tener el mismo E i . Además, neutraliza los errores computacionales y perturbaciones al no depender de las impedancias de salida del inversor.
En la Fig. 3 se muestra el diagrama de bloques de la estrategia de droop control modificada a robusta, en la tabla 1 se detallan las variables involucradas en este diagrama de bloques.
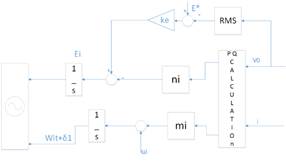
Para el diseño del controlador se tomaron en cuenta los siguientes parámetros:
Identificación del sistema
Antes de implementar los diferentes lazos de control previstos para este sistema, es primordial tener un conocimiento detallado del estado inicial y las áreas que requieren mejoras. conocer su estado inicial y las deficiencias a mejorar.
En la tabla 2 se presentan los valores eléctricos de la MR propuesta, los cuales se utilizarán para validar la estrategia de control.
El sistema presentado opera a una frecuencia de 50 Hz ya que la mayoría de las aplicaciones de MR se encuentran en países europeos, rigiéndonos al benchmark se optó por tomar este valor normalizado en el extranjero. Sin embargo, se podría variar los valores del sistema ponerlo a operar al nivel de voltaje estandarizado en el país.
Tabla 2: Parámetros eléctricos del sistema
| Parámetro | Sym | Valor | Unidad |
| Frecuencia nominal | W | 2π.50 | Rad/s |
| Voltaje de la red | E | 311 | V |
| Inductancia de salida | L0 | 1.8 | mH |
| Filtro inductivo | Lt | 1.8 | mH |
| Filtro capacitivo | Cl | 25 | µF |
| Carga | RL | 200/400 | Ω |
| Voltaje DC | Vdc | 650 | V |
El voltaje pico de la red es 311 V por lo que su voltaje eficaz es 220 V.
En las tablas 3 y 4 se aprecia las características de las DG implementadas para la operación del sistema.
Tabla 3: Parámetros eléctricos de la DG1
| Parámetro | Valor | Unidad |
| Voltaje del panel | 650 | V |
| Corriente del panel | 7.84 | A |
| Corriente del diodo | 2.96 | A |
| Potencia máxima PV | 213.15 | W |
| Temperatura | 25 | ºC |
| Irradiancia | 1000 | W/m2 |
Tabla 4: Parámetros eléctricos de la DG2
| Parámetro | Valor | Unidad |
| Voltaje del panel | 650 | V |
| Corriente del panel | 7.84 | A |
| Corriente del diodo | 2.96 | A |
| Potencia máxima PV | 213.15 | W |
| Temperatura | 25 | ºC |
| Irradiancia | 1000 | W/m2 |
Los valores de la temperatura e irradiancia se establecieron utilizando la base de datos del modelo del modelo de asesoramiento del sistema NREL de Simulink “NREL System Advisory Model” que incluye hojas de datos medidas bajo condiciones estándares, STC, por sus iniciales en inglés.
El control primario implementado en este documento se basa en una versión modificada de la estrategia de control “universal control droop”.
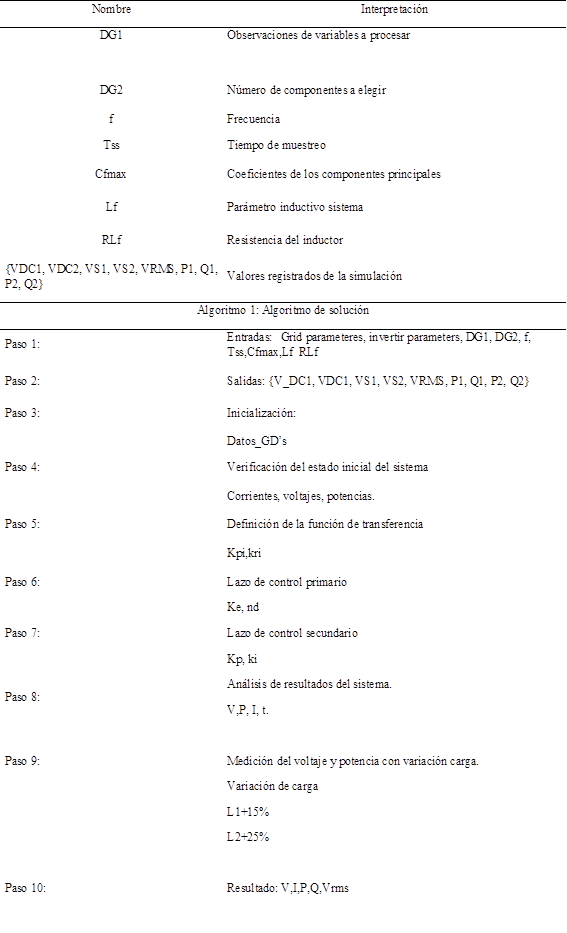
Algoritmo 1: Algoritmo de Droop control robusto
Paso 1: Entradas: [Tss, Irradiance, Temperature, f, U, 𝑬 ∗ , 𝑬 ∗ ]
Paso 2: Salidas: {VDC1, VDC2, VS1, VS2, VRMS, P1, Q1, P2, Q2}
Paso 3: Inicialización:
Datos_GD’s
Paso 4: Medición de datos del sistema
VDC, I1, I2, I ref
Paso 5: Medición de corrientes del sistema
I1, I2, I ref
Paso 6: Cálculo de Potencias del inversor
P


Paso 7: Sintonización de los convertidores del sistema kp, ki,


Paso 8: Comparación de voltaje
Si V< 1 p.u
Inyección de potencia a convertidores de tensión.
Sino
Continuar
Fin Si
Paso 9: Estabilidad de voltaje del sistema
Paso 10: Retornar:
Variación de carga
L1+15%
L2+25%
Este principio se puede implementar en el VSI al aplicar el método “P/Q Droop”.


Donde las variables 𝒘 ∗ y 𝑬 ∗ son las referencias de frecuencia y amplitud y 𝒘.
Las salidas de voltaje son representadas con la letra E. 𝑷 ∗ y 𝑸 ∗ son las referencias y P y Q representan la potencia activa y reactiva respectivamente; y 𝑮 𝑷 𝒔 y 𝑮 𝑸 𝒔 como sus funciones de transferencia.
El voltaje de salida del inversor puede ser regulado al controlar su potencia reactiva de salida y su frecuencia puede ser regulada al controlar su potencia activa [24]. Comprobándolo en las ecuaciones


Donde U es la integración del voltaje, 𝑼 𝒏 la salida del voltaje del inversor, 𝑿 𝒏 es la impedancia de salida del inversor y 𝜹 𝒏 el ángulo entre los voltajes.

La transformada de Clarke se emplea para transformar la referencia en Alpha y beta para tener dos sistemas independientes de una sola fase. Los controladores de resonancia, PR, son aplicados para obtener una mejor regulación de voltaje con menos armónicos [18].
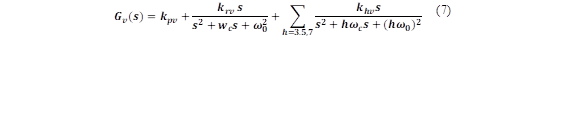
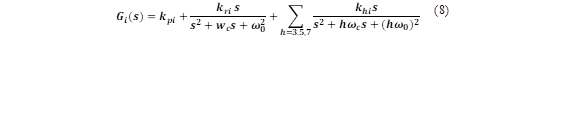
En las ecuaciones anteriores 𝒌 𝒑𝒑 y 𝒌 𝒑𝒊 son ganancias proporcionales, 𝒌 𝒓𝒗 y 𝒌 𝒓𝒊 son las ganancias en la frecuencia fundamental, 𝒌 𝒉𝒗 y 𝒌 𝒉𝒊 son las ganancias resonantes en el harmónico h, 𝒘 𝒄 es el ancho de banda resonante usado para evadir los problemas de inestabilidad asociados con la ganancia infinita, 𝝎 𝟎 es la frecuencia fundamental [18].
Los valores obtenidos de las ecuaciones 7 y 8 son mostrados en la tabla 5.
La DG2 busca mejorar el comportamiento de esa parte del sistema a través un controlador PI, acción proporcional integral, que es definida mediante:

Donde 𝑻 𝒊 es el tiempo integral, responsable de la acción integral.

Un controlador de la forma

Donde los valores de las ganancias


En la tabla 5 se puede observar los valores obtenidos para el control proporcional integral para el lazo de voltaje.
Parámetros de los inversores
El diseño de este estudio está basado en el control clásico, el sistema es implementado en Matlab Simulink. En la DG 1 se utilizó la técnica de control droop modificado robusto y en la DG 2 un controlador PI convencional.
Tabla 6: Parámetros del control primario
| Parámetros del inversor | |||||
|---|---|---|---|---|---|
| ke | n | M | nd | Md | |
| VSI1 | 7 | 0.2178 | 0.2178 | 0.003 | 2 |
CASO DE ESTUDIO
El caso de estudio se plantea en una MR AC/DC, en estado asilado, la cual se alimenta por dos buses de sistemas fotovoltaicos que se conectan a un mismo punto PCC, cada DG alimenta 2 y 1 cargas respectivamente.
Los valores asignados a los parámetros de los distintos elementos que constituyen el sistema de pruebas se proporciona en el artículo de [2], el mismo que ha sido aplicado en varias investigaciones con diferentes objetivos de estudio.
Se plantea tres escenarios de operación de la MR, el primero contempla el funcionamiento original del sistema, con las dos GD acopladas; y el segundo escenario realiza variaciones en las cargas del sistema además de aumentar las cargas del sistema es un 15 y 25% respectivamente y en el tercero y último la introducción de una perturbación para verificar la robustez del controlador.
Para comenzar se realiza la identificación de la planta para posteriormente realizar un control primario y posteriormente continuar con el control secundario.
El índice de estabilidad de voltaje está el tiempo de más medidas de sincronización desde el área de monitoreo [29].







Si el valor del índice es 1, el sistema se muestra estable y si el valor es 0 el voltaje se encuentra inestable.
ANÁLISIS DE RESULTADOS
En la sección anterior se presentó el modelo a ser estudiado y la metodología para resolver el problema propuesto.
Para la resolución de este problema se plantearon tres escenarios.
El primero, o el estado inicial del sistema, donde está operando en condicionales normales, aislado de la red, con las dos DG acopladas sin las cargas conectadas. El segundo escenario con la inclusión de las cargas con el porcentaje de carga aumentado En el tercer escenario se introduce una perturbación al sistema para verificar el funcionamiento del control droop robusto y el control PI.
Escenario 1
En este escenario se dará a conocer el estado inicial del sistema cabe resaltar que las DG operando simultáneamente, ya que al no contar con la referencia de la red principal se encuentran en una continua búsqueda del alance entre la generación y demanda.
El control primario consta de tomar medidas locales, en el sistema propuesto se realizó un control primario donde se desarrolló un control de voltaje y corriente, control de potencia. En las fuentes se realizó el diseño y la implementación de un droop control robusto. Para finalmente comparar su desempeño con el control PI.
A continuación, se observa el estado inicial de cada una de las fuentes del sistema en operación.
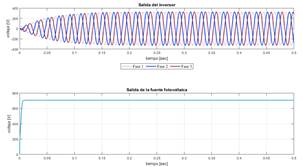
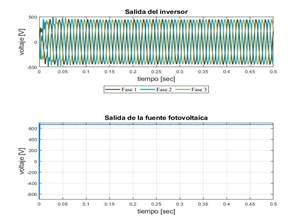
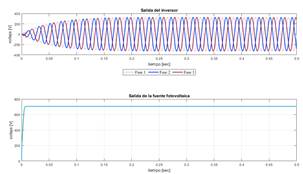
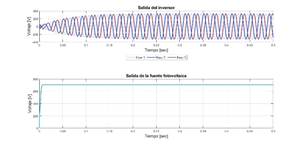
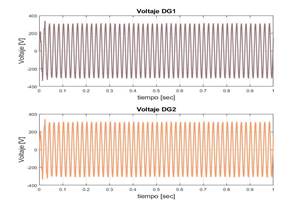
En la Fig. 5 se puede apreciar la salida del inversor de la DG1 y la señal de salida DC de la generación solar fotovoltaica 1, como se puede observar el voltaje pico de la salida del inversor es de aproximadamente 311 voltios y alcanza la estabilidad a los 0.15 segundos. Mientras que el VDC o DC link es de aproximadamente 650, los valores fueron basados en valores nominales.
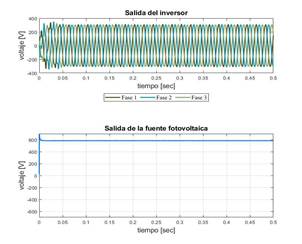
En la Fig. 6 se puede apreciar la salida del inversor de la DG 2 y la señal de salida DC de la generación solar fotovoltaica 2. Al inicio de la simulación se aprecia que el comportamiento de la señal poco a poco toma la forma sinusoidal. Se puede observar que el tiempo de estabilización es los 0.1 segundos aproximadamente y de igual manera el voltaje DC es el establecido en los parámetros del sistema.
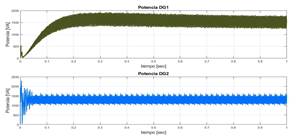
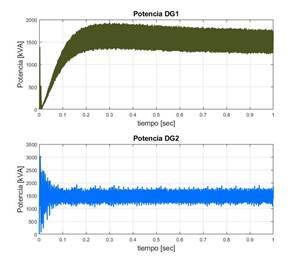
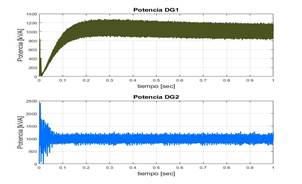
En la Fig. 7 se puede observar el comportamiento de la potencia de las dos generaciones distribuidas en un lapso de un segundo. El control presentado se puede apreciar que llegan a un valor contante y permanecen alrededor de los 1500 VA. El tiempo de levantamiento de la señal de potencia es del 0.1 segundo y el tiempo de asentamiento de la potencia es de 0.2 segundos.
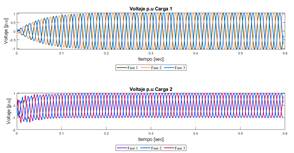
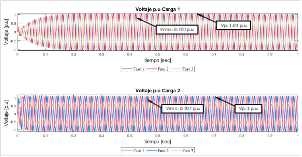
En la Fig. 8 se puede apreciar los voltajes p.u. en las barras donde se encuentran conectadas las cargas. De acuerdo con los resultados obtenidos los voltajes están dentro del rango permitido, muy cercanos a la unidad. Satisfaciendo cada una de las cargas.
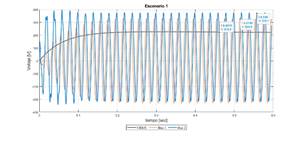
En la Fig. 9 se aprecia el voltaje RMS del sistema y los voltajes en las barras de las cargas 1 y 2 en el escenario inicial des sistema planteado.
Escenario 2
En este escenario se presenta la variación de las dos cargas del sistema, desde el inicio de la operación del sistema donde se aumenta 15 % y 20% de la potencia consumida de las cargas de sistema.
Con el fin de poner a prueba las estrategias de control implementadas en el sistema se realiza el aumento del valor de las cargas obteniendo como resultado las figuras siguientes.
En la Fig. 10 se observa el comportamiento del voltaje a la salida de la fuente al realizar el aumento de cargas, donde el voltaje producido al estar acoplado desde el principio con la GD2.
Además, se puede apreciar que el tiempo de la estabilización de voltaje es reducido, como se observa el tiempo de estabilización es de 0.15 segundos.
La salida DC del sistema se estabilizada en 650 V en menos de 0.05 s.
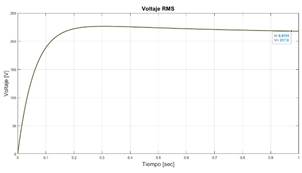
En la Fig. 11 se puede apreciar el voltaje rms del sistema, el cual corresponde al 0.707 del voltaje pico, siendo 217.9 V.
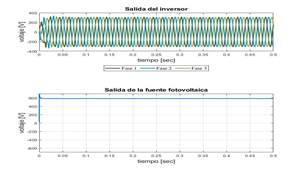
En la Fig. 12 se aprecia los voltajes a la salida de las fuentes de la DG 2, observando que se mantiene los voltajes DC y AC estabilizándose la señal DC a los 0.05 s. y la señal AC a los 0.35 s. La salida mostrada de la DG2 es la salida del control PI implementado.
En la Fig. 13 se observa la potencia generada por cada una de las generaciones distribuidas a través del segundo de prueba del segundo escenario propuesto, donde se observa que la potencia se estabiliza al cabo de 0.5 segundos alrededor de 1500 kVA.
En la Fig. 14 se observa que los valores p.u obtenidos están cercanos a la unidad por lo que se está asegurando que llega el voltaje correcto a cada una de las cargas a pesar de haber aumentado se demanda.
Escenario 3
En este escenario después de haber visto el comportamiento del sistema en los dos escenarios previos se pone a prueba la robustez del controlador implementado a través de perturbaciones instantáneas que pueden sacar total o parcialmente una fuente del sistema.
El objetivo del control robusto es devolver la estabilidad del sistema al cabo del menor tiempo posible.
En la Fig. 15 se puede apreciar el comportamiento de la fuente uno al agregar una perturbación al sistema, como se puede observar en los primeros segundos antes de los 0.05 s se distingue una perturbación en el voltaje que rápidamente es compensada por la estrategia de control robusto llegando a su voltaje establecido a los 0.15 s.
La Fig. 16 muestra el comportamiento de la DG 2 después de la presencia de la perturbación como se puede al observar la señal se ve afectada los primeros microsegundos, sin embargo, la estrategia de control permite al sistema estabilizarse a los 0.1 segundos. De igual manera se aprecia el valor de la salida de la fuente fotovoltaica.
En la Fig. 17 se aprecia que la potencia del sistema inicial no se ve afectada, al ingresar la perturbación al sistema, por lo que el control robusto cumple su función.
En la Fig. 18 se aprecia el voltaje de las DGs, observando una perturbación inicial, la cual es reestablecida a su valor nominal al cabo de 0.1 s. además se aprecia que el tiempo de levantamiento es menor a un milisegundo, indicando que la estrategia de control brinda una respuesta rápida a los cambios repentinos que podrían ingresar al sistema.
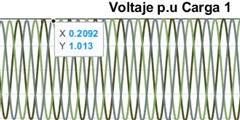
En la Fig. 19 se observa los valores de los voltajes por unidad en las barras de las cargas como se puede apreciar el voltaje en las cargas no es afectado, ya que la estrategia de control opera satisfactoriamente y logra establecer el voltaje en los valores deseados.
En la Fig. 19 se observa el valor de Y como el voltaje p.u. que es 1.01 pu. Al tiempo de 0.2090 s.
Al inicio de la operación del sistema se observa una variación en la señal de voltaje en las barras de la carga uno y dos que al cabo de 0.1 s. se ve solucionada gracias a la estrategia de control.

CONCLUSIONES Y RECOMENDACIONES
En el sistema presentado, una MR aislada con dos generaciones distribuidas acopladas de tipo solar fotovoltaico se desarrolló la estrategia de control droop robusto donde se pudo observar las salidas en AC y DC de las fuentes de generación distribuida, teniendo valores de voltaje 311 VAC y 650 VDC.
Se realizó la implementación de los inversores DC/AC mediante controladores clásicos tipo PI, limitando los valores de la corriente en las bobinas del conversor de potencia.
El control droop convencional fue modificado para convertirlo en un control droop robusto, a través de la modificación del diagrama de bloques. se realizó la implementación de una ganancia en la realimentación a la salida de voltaje del inversor y la adición. Donde se pudo apreciar su eficacia al tomar menos de 0.35 segundos para estabilizar el sistema.
En los escenarios uno y dos se observa el comportamiento de las dos fuentes al operar conjuntamente. El tiempo de establecimiento del transitorio de voltaje toma un lapso menor a los 0.34 segundos.
Después de la implementación en el software Matlab/ Simulink, se tiene que el sistema inicialmente planteado con dos GD de tipo DC abasteciendo diferentes tipos de carga, para poner a prueba la estrategia de control en el escenario uno se visualizó el estado inicial del sistema, en el escenario dos se varió la carga del sistema en un 15 y 20 %. Teniendo una respuesta del controlador en menos de 0.4 segundos donde a pesar del aumento de carga, el sistema responde en el mismo periodo de tiempo satisfaciendo los requerimientos del sistema en cuanto a potencia y voltaje. Por último, en el escenario tres se agregaron perturbaciones instantáneas que pueden sacar total o parcialmente una fuente del sistema a las dos cargas trifásicas pueden mejorar su operación a través de la implementación de la estrategia de control droop robusto. En la GD 1 muestra un notable mejoramiento en el voltaje estableciendo el voltaje propuesto de 650 VDC al cabo de 0.37 segundos.
En los escenarios presentados se pudo observar que el voltaje que llega a cada una de las cargas es cercano a la unidad por lo que se está satisfaciendo la demanda.
En los escenarios presentados se pudo observar el comportamiento del voltaje de cada una de las cargas y fuentes después de la implementación del control droop robusto, donde los lazos de control de voltaje y corriente Por lo que la solución ideal sería la implementación del droop control en ambas generaciones distribuidas. Con el fin de obtener una estabilidad de voltaje más cercana al valor establecido y con menos tiempo de establecimiento para la operación correcta del sistema y un correcto abastecimiento de las diferentes cargas.
TRABAJOS FUTUROS
Se puede investigar a partir de este caso de estudio un control robusto de voltaje, utilizado otras técnicas de control como impedancia virtual, H infinito.
Ampliar el espectro de tiempo de análisis para encontrar el comportamiento del controlador droop en un sistema acoplado a la red principal. Aplicar las estrategias a modelos estandarizados por IEEE o CIGRE.
Se debe tomar en cuenta que este tipo de sistemas son altamente no lineales, por lo que en el futuro sería más factible implementar sistemas de control no lineal. También se podría manejar al conversor a través de modelos linealizados más simples, con el fin de requiera menos esfuerzo de control.
El sistema de gestión de energía, EMS, juega un papel importante en el control de MR, por lo que su análisis sería conveniente para mejorar la calidad de energía del sistema.

