











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
Los sistemas de energía eléctrica han sufrido una evolución desde sus orígenes hasta la actualidad, tanto en lo que se refiere a medios de generación, transporte, distribución y utilización, como a materiales empleados, estrategias de operación, nuevas aplicaciones y fuentes de energía, principalmente. En los últimos años, la energía no convencional ha ido tomando fuerza obteniendo iniciativas a lograr una mayor eficiencia en todos los aspectos relacionados con la energía, lo cual, unido a la creciente preocupación por el medio ambiente, ha reactivado el interés por las llamadas energías renovables. Una de ellas es la energía eólica, conocida como una fuente de energía producida por el viento, este tipo de generación busca desarrollar su eficiencia y producción por medio de estudios enfocados a su desarrollo, gracias al avance de nuevas tecnologías como el diseño de turbinas, el control de accionamientos mecánicos y la incorporación de la electrónica de potencia.
La tecnología de energía eólica conectada a la red es la tecnología de más rápido crecimiento en el mundo actual. Sin embargo, la eficiencia y el rendimiento de los sistemas eólicos todavía están en desarrollo. La tecnología eólica produce una salida de potencia en corriente directa DC; se necesita un inversor para convertir la energía eléctrica DC de la fuente de energía eólica en energía eléctrica de corriente alterna CA. El inversor conectado a la red, el voltaje y la frecuencia de salida deberían ser los mismos que los del voltaje y la frecuencia de la red.
La práctica actual de los inversores eólicos se basa principalmente en la topología del inversor de fuente de voltaje (VSI) e inversor de fuente de corriente (CSI). Mediante el uso de un simple circuito de control, el VSI puede conseguir un alto factor de potencia. Por lo tanto, los inversores de tipo control de corriente son más populares.
En este documento, un estudio completo de un controlador trifásico se presenta el inversor conectado a la red. Para ello, se modela y simula el sistema de conexión a la red por generación eólica mediante la plataforma de simulación Matlab/Simulink. Este documento es organizado de la siguiente manera: la teoría de las tres fases, el inversor conectado a la red y la estructura del sistema se discuten en la Sección 2, esto consiste en el modelo matemático de control del inversor del lado de la red. El controlador de corriente y voltaje es diseñado en la Sección 3. Además, se explica el método COV para los inversores de energía conectados a la red en la sección 4. La simulación y el experimento del inversor utilizado se detalla en la Sección 5. Por último, el resumen de los resultados obtenidos en la sección 6 y las conclusiones previstas en la sección 7.
DESCRIPCIÓN Y MODELADO DEL SISTEMA
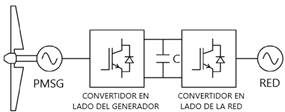
La Fig. 1, indica el diagrama de bloques que involucra diferentes partes del sistema de conversión de energía eólica (WECS), se utiliza el modelo tipo 4. El objetivo sensible de esos sistemas es idéntico: convertir la energía cinética del viento en electricidad e insertar esta energía a la red [1].
La potencia mecánica de la turbina generada por el viento es:

donde ρ es la densidad del aire, A es el área de barrido por las aspas, V es velocidad del viento, Cp es el coeficiente de potencia, λ es la velocidad de punta y β es el ángulo de inclinación de la pala.
El valor máximo de Cp está definido por el límite de Betz, el cual indica que una turbina solo podrá extraer un 59% de la potencia de una corriente de aire [2]. En realidad, los rotores de las turbinas de viento tienen un Cp máximo entre el rango de 25% a 45%.
La siguiente expresión es generalmente utilizada para determinar el Cp en la mayoría de las simulaciones de aerogeneradores [3]:

Siendo λ i [4]:

En [5] se puede encontrar un modelo que se utiliza frecuentemente y que está dado por los siguientes valores de Cp constantes: c1= 0.517 6; c2= 116; c3= 0.4; c4= 5; c5= 21; c6= 0.006 8.
La potencia mecánica se transforma a eléctrica por medio de un generador síncrono de imanes permanentes y la salida al lado del generador conectado a un rectificador. De la Fig. 2, el condensador de la barra de corriente directa, la relación entre el voltaje y la corriente se define como:

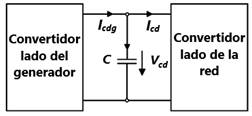
donde C es la capacitancia del condensador, Vcd es el voltaje cd del capacitor, Icdg es la corriente de salida del rectificador a la barra de corriente directa, Icd es la corriente de salida de la barra Vcd a la red.
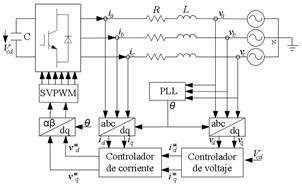
El voltaje de la barra de corriente directa se utiliza para el control en el lado de la red. En la Fig. 3 muestra un control trifásico de modulación por ancho de pulso en espacio vectorial (SVPWM) por medio de controladores PI conectado a la red.
El sistema de control consiste de un condensador en la barra de enlace cd, un inversor de fuente de voltaje VSI trifásico, un filtro inductor, la barra de salida a la red y un controlador digital.
El VSI trifásico, por medio del voltaje de entrada de corriente directa convierte en un voltaje sinusoidal por medio de señales de conmutación apropiadas para obtener un voltaje desfasado a 120 grados por medio del SVPWM.
El Control orientado al voltaje es una técnica de control clásica utilizada en los convertidores VSI debido a su simplicidad en la implementación [6], las variables de la fase espacial de VSI se proyectan en un marco dq que gira sincrónicamente, por lo que el sistema debe ser desplazado a esta nueva referencia.
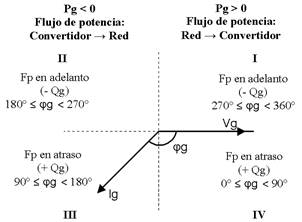
Esta técnica se utiliza tanto en sistemas trifásicos como monofásicos, según [7] “Si el marco dq está orientado de tal manera que el eje d está alineado en el vector de voltaje de la red, el control se llama control orientado al voltaje (COV)”. La Fig. 4 es el diagrama vectorial del sistema basado en la orientación del voltaje de la red.
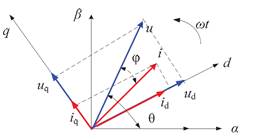
Donde
w es la velocidad angular del marco dq que es igual a la frecuencia angular de la red;
id, iq corrientes del eje d y q, respectivamente;
ud, uq voltajes del eje d y q, respectivamente.
La salida de voltajes del VSI trifásico en el marco de referencia síncrono, basado en la orientación del voltaje de la red, se obtiene la siguiente ecuación:
Donde:
R es la resistencia equivalente del inductor, L el filtro inversor equivalente del inductor, ω es la velocidad angular;
En el marco dq, la potencia activa (P) y reactiva (Q) de un VSI trifásico conectado a la red, está dado por:


Debido a que la velocidad angular en el marco dq se ajusta a la frecuencia angular de la red, las cantidades transformadas se convierten en variables de tiempo-invariante en estado estable, simplificando el diseño del controlador. Esto se logra mediante un control de lazo bloqueado por fase (PLL) [8] cuyo diagrama de bloques se muestra en la Fig. 5. La entrada al bloque PLL es el voltaje variable sinusoidal y la salida es el ángulo de fase para la transformación abc-a-dq.
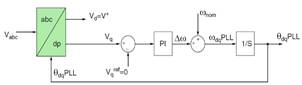
El controlador orientado por voltaje (COV) está formado por un bloque integrador con reset, cuya función es anular el resultado de la integración de la señal de frecuencia angular ωnom, cuando se alcance el límite de 2π radianes. De esta forma se genera en la salida un ángulo de sincronismo θdq variable entre 0 y 2π radianes [9].
En la Fig.5, el voltaje se regula a cero usando un controlador PI a lazo cerrado. La regulación de la componente del eje q del voltaje a cero, por consiguiente, (5) (6) puede reescribirse como (7) (8) respectivamente.


La potencia activa depende de la corriente del eje d, que es proporcional y puede ser controlada por la corriente del eje d, y la potencia reactiva depende de la corriente del eje q [7].
Además, para lograr el flujo de corriente fundamental del factor de potencia unitario, la componente del eje q del vector de corriente de mando se sintoniza a cero.
DISEÑO DEL CONTROLADOR
Según [10], la estrategia del COV garantiza una rápida respuesta transitoria y un alto rendimiento estático a través del bucle de control de la corriente.
Como se muestra en la Fig. 5, la entrada al bloque PLL es el voltaje de la red variable sinusoidal y la salida es el ángulo de rotación del vector de voltaje o también denominado ángulo de fase, que sirve para realizar las transformaciones abc a dq0 o viceversa, ya sean para voltajes como corrientes.
Existe un acoplamiento cruzado entre las componentes del eje d y del eje q. Sin embargo, el acoplamiento cruzado puede afectar al rendimiento dinámico del controlador. Por lo tanto, es muy importante desacoplar los dos ejes para mejorar el rendimiento dinámico [11].
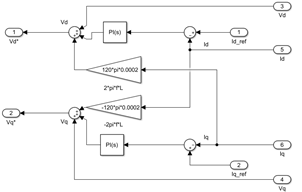
Se puede adoptar el método de control de desacoplamiento por compensación de retroceso. El diagrama de control del método de desacoplamiento se muestra en la Fig. 6.
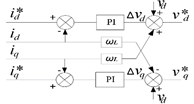
En la Fig. 6, id* e iq* son la corriente de referencia del eje d y del eje q, respectivamente; vd* y vq* son las salidas del controlador de corriente del eje d y del eje q, respectivamente.
La ecuación de control de desacoplamiento viene dada por:
El acoplamiento cruzado puede ser desacoplado por (7)(8). Por lo tanto, las corrientes del eje d id y las del eje q iq pueden ser controladas independientemente por la corriente de referencia id * y iq *, respectivamente, de tal manera que se controla la potencia activa y reactiva desde la sintonización de sus referencias.
Para cumplir el código de red, uno de ellos, es inyectar potencia a la barra infinita con un factor de potencia cercano a la unidad, para lo cual la corriente reactiva en el eje q se sintoniza a un valor de cero.
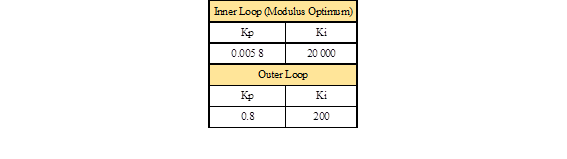
En consecuencia, se utilizan reguladores PI para lograr una rápida respuesta dinámica y cero errores de estado estacionario. El diagrama del controlador de corriente se muestra en la Fig. 7.

En el diagrama, Ta es el período de conmutación, τ la constante de tiempo, Ti es la constante de tiempo integral, kp y ki son los parámetros proporcionales e integrales, respectivamente; id*/iq* son las señales de corriente de referencia en el eje d y q, respectivamente; id/iq son las señales de corriente en el eje d y q, individualmente y R es la resistencia del inductor.
El modelo utilizado en la Fig. 7 corresponde al modelo de ajuste del módulo óptimo (criterio de valor absoluto óptimo) se utiliza a menudo en la sintonización convencional de los controladores analógicos. Cuando el sistema controlado tiene una constante de tiempo dominante y otra menor, la forma estándar de la función de transferencia del sistema de control para el módulo óptimo se logra cancelando la mayor constante de tiempo, mientras que la ganancia de bucle cerrado debe ser mayor que la unidad para tan alta frecuencias como sea posible [12].
Este método es ampliamente utilizado debido a su simplicidad y rapidez de respuesta [13]. Donde se busca del diagrama de bloques que el término (1+Ti*s) sea igual al termino (1+τs), se define entonces que τ=Ti.
Se obtiene entonces la función de transferencia del sistema en lazo abierto:

La ganancia del controlador se obtiene con la función de transferencia en lazo cerrado:

Luego:

Siendo:




Donde, 𝑻 𝒔 es el periodo de switcheo y 𝒇 𝒔 es la frecuencia de switcheo por los conmutadores.
El controlador de voltaje de cd se discute como el control Outer Loop o controlador de lazo externo.
Este control permite sincronizar el voltaje del lado de la barra de corriente directa, mediante el control desacoplado de corriente, para de esta manera por medio de un valor de referencia 𝑽 ∗ 𝒅𝒄 que ajusta el controlador PI, de esta manera inyecta la máxima cantidad de potencia, mediante la conmutación accionada por medio de voltaje del inversor.
En la Fig. 8, se observa el diagrama de control de voltaje.
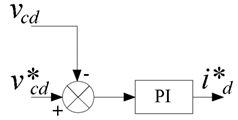
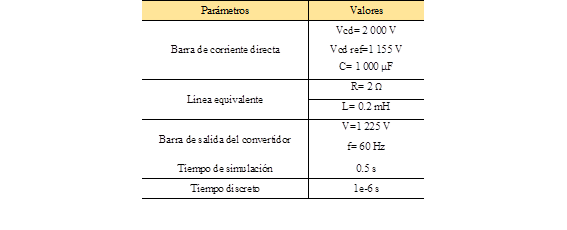
Para determinar la referencia de voltaje CD apropiada 𝑽 ∗ 𝒄𝒅 , uno debe tener en cuenta los transitorios del sistema y las posibles variaciones de voltaje de la red [14], para el máximo 𝑽 ∗ 𝒄𝒅 .

Donde, 𝑽 𝑪𝑫 corresponde al voltaje del capacitor.
Para el cálculo del voltaje del capacitor, previamente es necesario saber a qué nivel de voltaje se va conectar el inversor, para lo cual se utiliza lo siguiente:

Donde, 𝑽 𝑳−𝑳_𝑹𝑬𝑫 corresponde al voltaje línea - línea de la red y m es el índice de modulación el cual puede alcanzar como valor máximo de 1.
El voltaje de salida del inversor esta dado por la siguiente ecuación.

INTEGRACIÓN A LA RED
Los sistemas electrónicos de potencia se utilizan con frecuencia para la conversión de energía eléctrica a nivel de aerogenerador, a nivel de parque eólico o a ambos, y dentro del aerogenerador se utilizan convertidores electrónicos de potencia para controlar los flujos de energía activa y reactiva constantes y dinámicos hacia y desde el generador eléctrico [15], [16].
Los convertidores utilizados por lo general en la conmutación en el VSI están dados por los siguientes tipos de interruptores (ver Tabla 1).
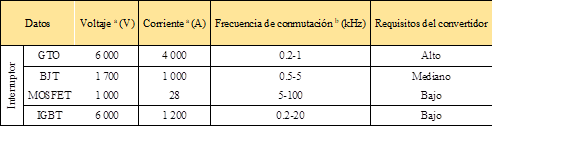
a. Máxima potencia de salida; b. Rango de operación.
Al utilizar un sistema back to back, compuesto por convertidores accionador por IGBT´s, el flujo de potencia es bidireccional como se puede observar en la Fig. 9.

Cuando la potencia activa se entrega desde la red al circuito de cd, el inversor funciona en un modo rectificador (Pg > 0) y cuando la potencia se transfiere desde el circuito de cd a la red (Pg < 0), el inversor está en modo de inversión [14].
SIMULACIÓN
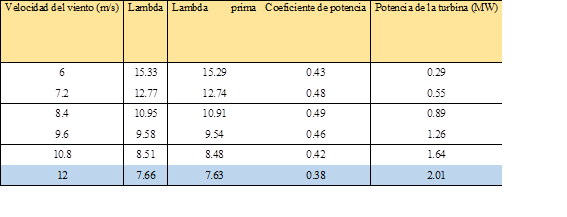
Para la simulación, el modelo se basa en las características de potencia de la turbina en estado dinámico.
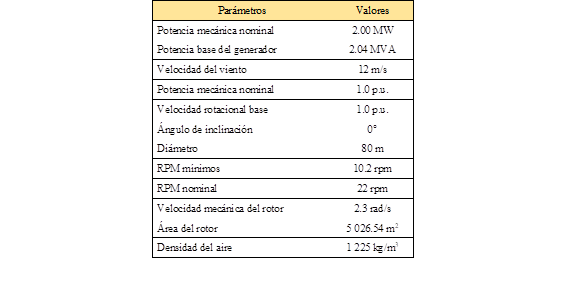
La transferencia de potencia depende de la velocidad del viento como se presenta en la tabla 3, los valores de lamba, coeficiente de potencia y la capacidad de la turbina, en la cual a una velocidad de 12 m/s proporciona la potencia nominal por la turbina a 2 MW con un ángulo de inclinación (𝜷=𝟎).
La simulación emplea la máquina síncrona de imanes permanentes por su ventaja de excitación interna, en la Fig. 11, muestra la entrada de viento tipo escalón, que sirve como referencia para la generación de 2 MW por unidad.

Figura 11: Potencia activa generada p.u. a una entrada de viento tipo escalón (a); tipo rampa (b); tipo aleatorio (c)
Control Lazo Bloqueado de Fase (PLL)
Para el control de lazo se determinan las señales de voltaje de la red en el eje dq0, por medio de un control a lazo cerrado se toma la frecuencia de trabajo de la red y se la compara con un valor de referencia de 2* π *f.
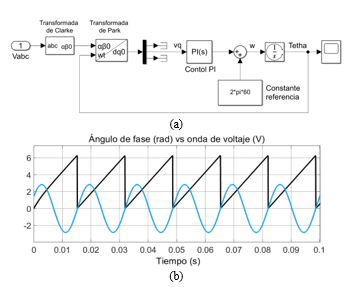
Figura 12: Esquema de control PLL sincronizado con la red (a) y ángulo de fase vs la onda de voltaje (b)
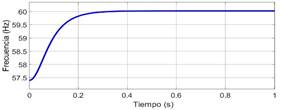
El resultado del lazo cerrado que es implementado para la sincronización de la velocidad angular permite que el sistema trabajé a una frecuencia de 60 Hz y a una velocidad angular de 2* π *f = 377 aproximadamente.
Controlador de corriente (Inner Loop)
El control vectorial de corrientes que circula del inversor a la red, se realiza mediante el siguiente esquema de lazo interno.
En la Fig. 14, muestra el esquema de control inner loop que tiene como variables de entrada Vd, Vq, Id, Iq, que son calculadas por parte del bloque de la transformada de Park utilizando el ángulo (Wt) de la sincronización con la red, además de la Id_ref y Iq_ref que son valores dados por el investigador o también pueden ser calculados que se presentarán más adelante.
Las variables de Vd* y Vq*, se acoplan a un modulador por ancho de pulso en vector espacial mediante la transformada de Clarke de dq0 a 𝜶𝜷𝟎 para convertir la señal por medio del bloque SVPWM de segundo nivel, el cual es encargado de enviar los pulsos al inversor.
Controlador de voltaje (Outer Loop)
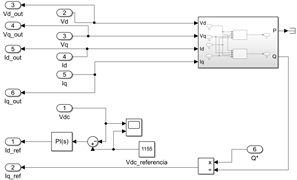
En la Fig. 15, se muestra el control outer loop que tiene como entrada Q*, es el valor con respecto a la cantidad de potencia reactiva de referencia a suministrar a la red, la división entre la referencia y la calculada da como resultado la corriente Iq de referencia.
Además, para obtener la corriente Id de referencia se realiza un lazo de control abierto, mediante la diferencia Vcd de la barra de corriente directa, el Vcd calculado anteriormente, da como resultado una corriente de referencia en el eje Id que entrará juntamente con el eje Iq al control interno Inner Loop.
Para minimizar el valor de Q por medio del control Outer Loop se tomó un valor de referencia 0 y el valor de Vq=0 por tal razón las ecuaciones quedarían de la siguiente manera mostrada en lenguaje de una función empleadas por el programa.
Control orientado de voltaje (VOC)
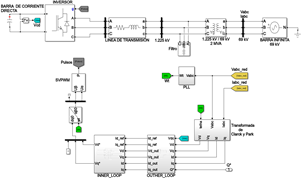
En la Fig. 16, se muestra el control en el lado de la red que este compuesto por el inversor, transformador elevador, línea de transmisión, filtro y la barra infinita.
El VOC está constituido por un PLL, control Inner Loop y control Outer Loop que se detallaron anteriormente y permite en conjunto el control de la potencia activa y reactiva por medio de los controladores PI y los valores de referencia de P*, Q*, Id_ref y Iq_ref.
RESULTADOS
Enlace Vcd
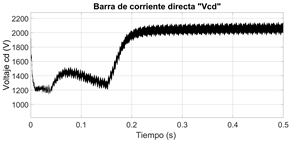
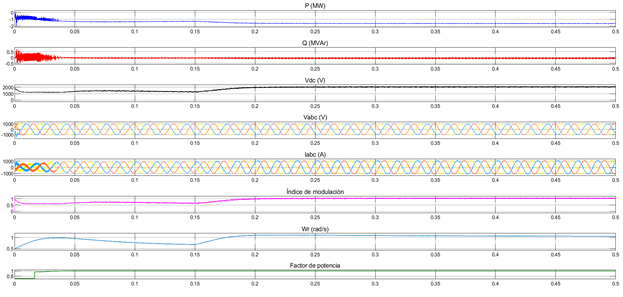
En la Fig. 17, muestra la señal del enlace Vcd del back to back, el cual tiene un valor de referencia de 1 155 V, tiende a estabilizarse de acuerdo con el valor del Vcd anteriormente calculado de 2 000 V, que llega cuando la índice modulación es igual a 1.
Control de potencia activa y reactiva
Corriente: En la Fig. 18, se muestra las corrientes en el eje dq en el lado de red, que permite manipular por medio de los controladores PI, que son utilizadas en el control inner y outer loop respectivamente.
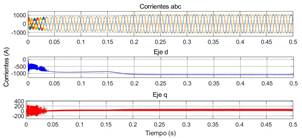
El comportamiento de las señales de corriente en el eje dq, se deben al control desacoplado inner loop, la cual es descrita anteriormente y se puede detallar que el valor de Iq=0.
Voltaje: En la Fig. 19, se muestra los voltajes en el eje dq en el lado de red, que intervienen en conjunto con señales de las corrientes dq, en los controles inner y outer loop respectivamente.
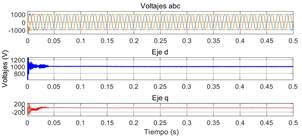
Las señales de voltaje y corriente en el eje dq permiten calcular los valores de potencia activa y reactiva, considerando que la señal Iq=0 y además que la variable Vq=0, no se emplea para el cálculo mencionado anteriormente y por tal razón el valor de la potencia reactiva tiende a ser 0, ver Fig. 20 y Fig. 21.
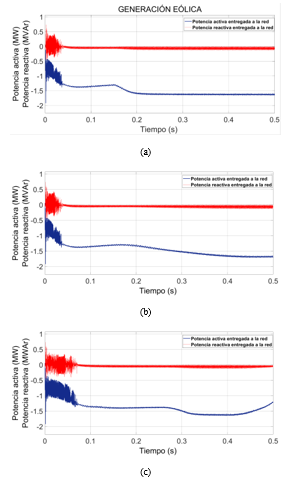
Figura 20: Señales de potencia entregadas a la red por el convertidor orientado de voltaje (COV) a una entrada de viento tipo escalón (a); tipo rampa (b); tipo aleatorio (c)
CONCLUSIONES
La configuración empleada en la simulación es el aerogenerador tipo D o tipo 4, debido a que presenta una mayor eficiencia de conversión de energía eólica al controlar la potencia activa y reactiva suministrada, utilizando una turbina eólica de 2 MW con control de pitch angle de (𝛽=0), que es el más utilizado para velocidades variables ya que permite captar la mayor potencia mecánica por la turbina, además está conectado mediante un generador síncrono de imanes p
ermanentes por accionamiento directo (sin caja de engranajes), para lo cual se implementa un control back to back compuestos por un rectificador e inversor accionado por IGBT´s, capaz de permitir el flujo de potencia bidireccionalmente con la red.
La configuración elegida se simula mediante el software Matlab/Simulink implementando un control PLL, donde sincroniza el ángulo de fase dado por la velocidad angular, para mantener un voltaje y frecuencia cercano al nominal, además de un control INNER LOOP, que modifica las corrientes de potencia activa y reactiva Idq del sistema, conjuntamente con el control OUTER LOOP que aporta con señales de referencia Vdq, obtenida de la barra de corriente directa, de manera que el inversor entrega la máxima cantidad de potencia activa por el aerogenerador, cumpliendo el código de red.
Los resultados arrojados en la simulación presentan un valor de potencia activa de 1.7 MW aproximadamente con signo (-) en la señal, significado que está suministrando a la red, mientras que la potencia reactiva es aproximadamente a 0, cumpliendo el código de red establecido en los sistemas de energía eólica al entregar a la red, un factor de potencia igual o cercano a la unidad manteniendo el voltaje y frecuencia dentro de su valor nominal, entregando la máxima cantidad de potencia activa a la red.
AGRADECIMIENTOS
Nuestro sincero reconocimiento y gratitud a la Universidad Técnica de Cotopaxi por abrirnos las puertas de la Institución, para podernos formar como profesionales, impartiendo conocimientos de vital importancia para nuestro desempeño en el campo profesional, a mi gloriosa y grande carrera de Ingeniería Eléctrica.

