











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
Los trastornos neurodegenerativos, como la enfermedad de Parkinson (EP), la atrofia muscular espinal y la esclerosis lateral amiotrófica, entre otros [1-3], tienen un impacto profundo en el sistema nervioso, afectando frecuentemente las funciones motoras. Los síntomas comunes asociados con estos trastornos motores incluyen dificultad para iniciar y coordinar movimientos musculares suaves, inhibición de movimientos involuntarios, desafíos con el ajuste postural, debilidad progresiva de los músculos de las extremidades y atrofia muscular [4-6].
La terapia de estimulación eléctrica desempeña un papel crucial como tratamiento no farmacológico para los trastornos motores asociados con enfermedades neurodegenerativas. Las técnicas no invasivas comunes incluyen la estimulación eléctrica nerviosa transcutánea (TENS) y la estimulación eléctrica funcional (FES). La TENS se enfoca principalmente en las fibras nerviosas aferentes para mitigar la atrofia muscular, aliviar el dolor, mejorar la fuerza muscular y apoyar la terapia de movimiento funcional [7]. En contraste, la FES estimula los nervios motores para inducir contracciones en músculos débiles o paralizados. Esta técnica es particularmente eficaz para pacientes con discapacidades motoras, como aquellos que experimentan parálisis o debilidad muscular severa [8].
El control motor artificial mediante FES es una estrategia asistencial diseñada para lograr movimientos funcionales e intencionales mediante la inducción de contracciones controladas en grupos musculares específicos [9]. El potencial terapéutico de esta técnica ha sido ampliamente estudiado en diversas condiciones, incluyendo la enfermedad de Parkinson [10], la paraplejía [11] y las neuroprótesis [12]. Investigaciones realizadas por Qi Wu et al. [13] y Masdar et al. [14] demostraron la eficacia de la estimulación eléctrica en la restauración y mantenimiento de la actividad muscular en pacientes paralizados con lesiones de la médula espinal y déficits neuronales relacionados. Además, estudios de Hai-Peng Wang et al. [15] y Keller T. [16] destacaron el uso de la estimulación eléctrica para mejorar el control motor y apoyar el entrenamiento de la función motora en pacientes con accidente cerebrovascular.
A pesar de la disponibilidad de diversas tecnologías comerciales de estimulación eléctrica, los paradigmas experimentales en el control motor artificial, a menudo, requieren estimuladores con capacidades que superan las ofrecidas por las tecnologías estándar de TENS y FES [17, 18]. Por ejemplo, características avanzadas como estimulación multicanal con patrones de salida programables de forma remota y parámetros de estímulo personalizables son fundamentales en este contexto [19]. Sin embargo, los relatos detallados de prototipos avanzados de estimulación eléctrica siguen siendo limitados. Un ejemplo notable es el prototipo de estimulador programable multicanal desarrollado por Qi Xu et al. [20]. De manera similar, Hai-Peng Wang et al. [15] propusieron un estimulador FES capaz de multiplexar señales de un circuito amplificador a múltiples salidas con estímulos programables. A pesar de estos avances, los informes actuales sobre tecnología de estimulación eléctrica multicanal para control motor complejo presentan limitaciones significativas [15], [20]. En primer lugar, muchos estudios previos dependen de bloques de control electrónico difíciles de adquirir o replicar debido a herramientas de desarrollo y documentación inaccesibles [15], [19]. Por ejemplo, los prototipos descritos en [15] y [20] emplean tecnologías de control obsoletas. En segundo lugar, estos informes, frecuentemente, carecen de descripciones exhaustivas de las evaluaciones de desempeño y de las limitaciones de la amplificación de señales y los circuitos de fuente de corriente, lo que dificulta los esfuerzos de reproducibilidad y validación. Para abordar la necesidad de investigaciones contrastadas y reproducibles en el control motor avanzado, es esencial explorar tecnologías modernas y fácilmente replicables para la estimulación eléctrica. Este estudio tiene como objetivo diseñar y evaluar un prototipo de estimulador eléctrico superficial inalámbrico multicanal para FES. Las especificaciones de diseño incluyen funcionalidad de control remoto mediante un teléfono inteligente y el uso de componentes electrónicos ampliamente disponibles con recursos de desarrollo extensos para facilitar su replicación. Además, el prototipo es capaz de generar secuencias programables de señales bipolares rectangulares multiplexadas en cuatro canales aislados. El bloque controlador se implementa utilizando el microcontrolador inalámbrico ESP32, una plataforma ampliamente adoptada conocida por su gran comunidad de soporte, versatilidad y escalabilidad [21-24]. Asimismo, se realizó una prueba experimental preliminar para evaluar la capacidad del prototipo de generar contracciones musculares programables y secuenciales en músculos de la mano, capturadas mediante un guante sensor equipado con acelerómetros.
Materiales y métodos
Metodología de diseño
La Figura 1 ilustra la arquitectura general del estimulador eléctrico superficial multicanal (MSES, por sus siglas en inglés). El sistema consta de dos componentes principales: (i) un módulo de hardware que genera estímulos de corriente en forma de onda bifásica a través de cuatro canales activados de manera asincrónica, y (ii) un módulo de software, implementado como una aplicación para teléfonos inteligentes, que permite a los usuarios configurar parámetros de estimulación, incluyendo la magnitud, el periodo total, el intervalo entre estímulos y las secuencias de estimulación en los canales de salida. La comunicación entre los módulos de hardware y software se realiza a través de una conexión inalámbrica (wifi).

Hardware
La arquitectura del hardware consta de tres bloques principales: suministro, control y generación de estímulos de corriente, como se muestra en la Figura 2.
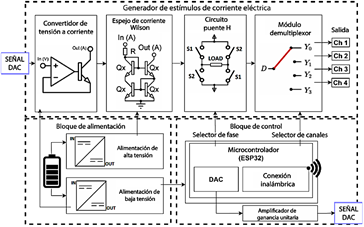
El bloque de suministro (sourcing block) es alimentado por una batería de 5 VDC, generando dos niveles de voltaje aislados. Un nivel de bajo voltaje de +/- 5 VDC es proporcionado por un convertidor DC-DC aislado (modelo THM 10-0521WI) para alimentar los circuitos digitales dentro del bloque de control y el circuito de acondicionamiento de señal analógica en la etapa inicial del generador de estímulos de corriente. Además, un nivel de alto voltaje de +/- 60 VDC se genera utilizando un convertidor DC-DC aislado (modelo R05-100B) para suministrar el generador de estímulos de corriente.
El bloque de control es gestionado por un microcontrolador ESP32 (Ten silica Xtensa, procesador de 32 bits, LX6), que cuenta con capacidades de comunicación inalámbrica integradas. El algoritmo del firmware procesa los comandos entrantes, como iniciar, detener, actualizar estímulos y secuencia de canales, así como los parámetros de estímulo, incluyendo los periodos de corriente anódica y catódica, magnitud e intervalos entre canales, desde la aplicación remota. El bloque de control ajusta la amplitud del estímulo a nivel bajo utilizando un convertidor digital a analógico (DAC) de 8 bits conectado a un circuito amplificador de ganancia unitaria, proporcionando un rango de salida del DAC de 0 a 3.3 VDC. Además, realiza dos funciones críticas dentro del bloque generador de estímulos de corriente: invertir la magnitud amplificada del pulso eléctrico para producir un estímulo bifásico y demultiplexar el estímulo hacia un canal de salida designado.
El generador de estímulos de corriente eléctrica consta de cuatro etapas principales. La primera etapa convierte el voltaje de bajo nivel de la señal DAC en una señal de corriente de alto voltaje (+/- 60 VDC), siguiendo las recomendaciones detalladas en [15]. Específicamente, la señal DAC se alimenta en un circuito convertidor de voltaje a corriente, comúnmente conocido como amplificador de transconductancia. La señal de corriente resultante alimenta dos circuitos de amplificación de corriente (Wilson Current Mirror - WCM), cada uno alimentado por los niveles HV+ y HV-, creando un flujo de corriente constante a través de OUT+ y OUT- cuando se conecta una carga, como se muestra en la Figura 3. En el circuito WCM, el uso de valores de resistores (R+ y R-) menores a 1 kΩ ocasiona la degradación de la señal en la salida, particularmente para resistencias de ≈ 1kΩ. Este estudio adoptó valores de resistores de 2,4 kΩ para R+ y R-, que demostraron los niveles de ruido más bajos en la salida y minimizaron la caída de voltaje a través de VCE en los transistores Q1 y Q2. Los valores específicos de R+ y R- también influyen en el voltaje máximo en OUT+ y OUT-, limitando consecuentemente la corriente máxima de salida [15].
En la segunda etapa, el terminal de salida delWCM se conecta a un circuito inversor de fase que presenta una topología de puente H de cuatro interruptores programables controlada por el bloque de control. Este circuito invierte la dirección del flujo de corriente a través de la carga para generar una forma de onda bifásica o deshabilita completamente la transmisión del estímulo. El hardware puede configurarse para producir una forma de onda cuadrada con duraciones especificadas para el ciclo anódico (corriente anódica, interruptores S1 encendidos), ciclo catódico (corriente catódica, interruptores S2 encendidos) y el intervalo entre estos ciclos. Finalmente, la señal bifásica pasa a través de un circuito selector (demultiplexor) que, conforme configuración del bloque de control, dirigirá el estímulo a una de las cuatro salidas disponibles.
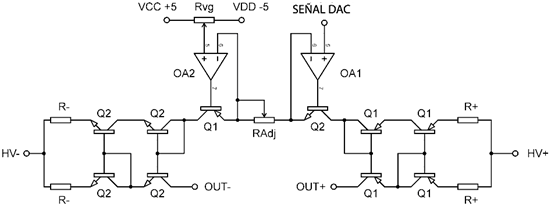
Figura 3 Esquema eléctrico del circuito convertidor de voltaje a corriente (V-a-C) y los circuitos Wilson Current Mirror (WCM). El circuito V-a-C utiliza amplificadores operacionales TLC2252 (OA1 y OA2) y un resistor variable (RAdj) para ajustar el rango de corriente de trabajo. El WCM emplea transistores NPN (2N6517, Q2) con el resistor R- para amplificar la señal a HV-, y transistores PNP (2N6520, Q1) con el resistor R+ para lograr HV+
Software
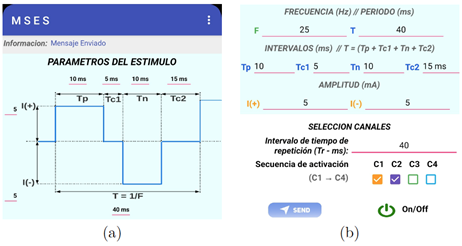
Este proyecto utilizó la plataforma Modular para desarrollar una aplicación de interfaz de usuario basada en teléfono inteligente, como se muestra en la Figura 4 [25]. La aplicación permite a los usuarios ajustar los parámetros del estímulo (Figura 4a), incluyendo la magnitud del estímulo (I+, I-), el periodo total (T), el periodo de corriente anódica (Tp, positivo), el periodo de corriente catódica (Tn, negativo) y dos períodos no estimulados: Tc1 (entre Tp y Tn) y Tc2 (después de Tn). Cuando se aplica estimulación a un canal específico, el estímulo se entrega repetidamente a esa salida durante un periodo configurado por el usuario, Tr, asegurando contracciones mecánicas consistentes que no se podrían lograr con un solo pulso de estímulo cuadrado. La interfaz de usuario admite actualizaciones en tiempo real de los parámetros de estimulación en el hardware y gestiona la aplicación de los estímulos (Figura 4b). Durante la estimulación multicanal, el estímulo configurado se dirige secuencialmente a los canales habilitados en orden ascendente (es decir, del canal 1 al canal 4).
Pruebas de desempeño
La evaluación del desempeño del sistema implica determinar los límites operativos de los parámetros del estímulo y el paradigma de estimulación multicanal. La primera prueba evaluó la magnitud del estímulo activando una sola salida (canal 1) y variando tanto la magnitud del estímulo como los valores de carga resistiva (1 kΩ, 5 kΩ y 10 kΩ).. Durante esta prueba, la salida del DAC se configuró en nueve valores fijos dentro de su rango dinámico, lo que permitió derivar una ecuación que relaciona los valores digitales configurados en el DAC con los niveles de corriente de salida. La segunda prueba midió la estabilidad de la corriente eléctrica y los tiempos de subida y bajada del estímulo de onda cuadrada bajo diferentes condiciones de carga. La prueba utilizó un nivel de corriente fijo de 5 mA, con valores de periodo para Tp, Tn, Tc1, Tc2 y el periodo total (T) establecidos en 25 ms, 25 ms, 10 ms, 40 ms y 100 ms, respectivamente (F = 10 Hz). Se aplicaron valores de carga resistiva de 1, 3.3, 5.6, 10, 12 y 20 kΩ. La última prueba evaluó la capacidad del sistema para redirigir secuencialmente el estímulo configurado a través de múltiples canales, siguiendo el paradigma de estimulación multicanal. Esta prueba midió simultáneamente dos canales (canales 1 y 2), utilizando magnitudes de estímulo de 2.5 mA y 5 mA, con períodos Tp y Tn de 25 ms y 40 ms, respectivamente, y un periodo Tr igual al periodo total T (un estímulo por canal).
Prueba de aplicación preliminar
Esta prueba de aplicación preliminar sirvió como una evaluación inicial de la tecnología propuesta, sin efectuar pruebas extensas en individuos sanos o pacientes con enfermedades neurodegenerativas. El objetivo principal fue evaluar la capacidad del sistema para generar estímulos de corriente eléctrica controlados a través de múltiples canales, induciendo contracciones intencionales de los dedos en una secuencia predeterminada. El experimento se llevó a cabo en el Laboratorio del Grupo de Investigación en Ingeniería Biomédica (GIIB-UPS) con dos participantes, ambos autores de este estudio. Ambos participantes informaron estar en buen estado de salud, sin antecedentes de trastornos musculares o neurológicos, afecciones cardíacas o uso de marcapasos. Esta prueba siguió los principios éticos establecidos en la Declaración de Helsinki [26], y se obtuvo el consentimiento informado de ambos participantes. Se identificaron tres regiones de estimulación (R1, R2, R3) en el antebrazo y una región de tierra (RG) en el olécranon para la colocación de los electrodos (Figura 5a). Esta configuración siguió un protocolo previamente establecido [27] para provocar contracciones en los dedos índice, medio y anular + meñique, correspondientes a la estimulación en R1, R2 y R3, respectivamente.
Antes de iniciar la estimulación multicanal, se determinó la magnitud del estímulo necesaria para provocar contracciones musculares visibles, pero sin dolor. Para lograr esto, se aplicó estimulación de un solo canal, aumentando gradualmente el nivel de corriente desde 0 mA hasta que se observó una contracción visible, asegurándose de que no hubiera dolor para el participante. Los parámetros seleccionados para la prueba multicanal fueron los siguientes: periodo total (T) de 20 ms, fases anódica (Tp) y catódica (Tn) de 200 μs, un intervalo entre fases (Tc1) de 100 μs, un intervalo de repetición (Tr) de 5 s, y una magnitud de estímulo de aproximadamente 5 mA. Estos niveles de estimulación están en línea con los utilizados en estudios previos [28].
Para la estimulación multicanal, se utilizaron tres canales (C1, C2, C3) y dos modos de estimulación. En el primer modo, los canales C1, C2 y C3 se conectaron a las regiones R1, R2 y R3, respectivamente. En el segundo modo, las conexiones se reconfiguraron a R2, R3 y R1, respectivamente. En ambos modos, el estimulador fue programado con un patrón de estimulación secuencial de C1 → C2 → C3.
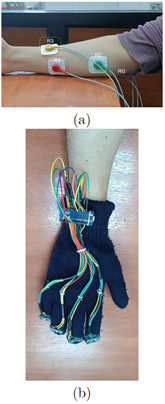
Figura 5 (a) Regiones de colocación de electrodos para estimulación en el antebrazo (R1, R2, R3) y referencia en RG. (b) Guante sensorial con sensores MPU6050 adjuntos al dedo índice, medio, anular y meñique.
Se desarrolló un guante sensorial para medir objetivamente el movimiento de los dedos en respuesta a cada estímulo. Este guante incorpora cuatro sensores de aceleración (MPU6050), cada uno adjunto al dedo índice, medio, anular y meñique (Figura 5b). Los sensores se comunican con un microcontrolador ATmega328 (Arduino Nano) a través del protocolo I2C, y los datos registrados se almacenan en un archivo digital .txt, utilizando comunicación serie. Los datos de los sensores facilitan el cálculo del ángulo de rotación (pitch) de cada dedo a medida que se flexiona. Antes de la estimulación, se instruyó al participante para que mantuviera la mano en una posición natural y relajada (reposo), durante la cual se registraron los ángulos de rotación medios iniciales. En consecuencia, los datos de los sensores se expresan como valores relativos a las posiciones iniciales de los sensores.
Resultados y discusión
Indicadores de desempeño
La salida del DAC varió linealmente en un rango de -0.08 a 2.93 V para valores de entrada entre 0 y 255 unidades digitales. Para lograr una salida de 10 mA en el bloque generador de corriente eléctrica a partir del voltaje máximo de salida del DAC, RAdj en el circuito V-a-C (Figura 3) se ajustó según la ecuación: RAdj = V DACmax/Imax, es decir, 2.93V/10mA = 293Ω. RAdj ajusta el nivel de corriente en la salida del circuito V-a-C, que posteriormente se amplifica a través del circuito WCM (Figura 3). La Figura 6a ilustra una relación directamente proporcional entre el voltaje a través de la carga y los niveles del DAC. El voltaje de salida aumenta con el valor de la carga para mantener un nivel de corriente constante en la salida. Sin embargo, a medida que la magnitud de la carga aumenta, tanto el voltaje de salida como el nivel de corriente alcanzan la saturación. Este comportamiento se atribuye al voltaje máximo disponible en los terminales OUT+/- durante la prueba de desempeño, que alcanzó un valor máximo de 77.6 VDC. Es importante destacar que durante las pruebas experimentales, los convertidores DC-DC se configuraron para proporcionar +/-64 V para +/-HV. La Figura 6b demuestra una relación aproximadamente lineal entre la corriente de salida y la variable de control del DAC para tres cargas resistivas (1, 5 y 10 kΩ). Se alcanzó una corriente máxima de 7.63 mA para la carga de 10 kΩ, lo que es consistente con la explicación de la saturación proporcionada anteriormente. Para la carga de 5 kΩ, la tendencia lineal se calculó utilizando regresión por mínimos cuadrados para determinar la relación salida/entrada. Este análisis arrojó la ecuación: Iout(mA) = (0.038× valor digital) −0.0819, que se integra en el algoritmo de firmware para convertir la magnitud del estímulo, expresada en unidades de corriente eléctrica, en valores digitales del DAC: valor digital = (1000 × Iout + 81.9)/38.8.
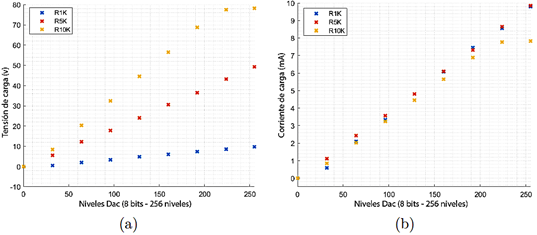
Figura 6 Mediciones de voltaje y corriente para un solo estímulo aplicado a cargas resistivas de 1, 5 y 10 kΩ, dentro del rango de la variable de control DAC. (a) Voltaje de salida en la carga vs. Niveles DAC, (b) Corriente de salida en la carga vs. Niveles DAC.
La Figura 7a ilustra la forma de onda de la señal de corriente de salida para resistencias de carga que van de 1 kΩ a 20 kΩ. En general, la magnitud medida del estímulo bifásico se mantiene estable, con un valor promedio de 4.38 mA y una desviación estándar de +/- 618 μA (12.37 % en relación con la magnitud del estímulo). La variación máxima (14.5 %) se observó con una carga de 20 kΩ. La Figura 7b muestra las mediciones del tiempo de transición de la señal para cambios entre magnitudes de estímulo del 10 % al 90 % y viceversa. El tiempo promedio de subida fue de 10.1 μs, con tiempos mínimos y máximos de 1.6 μs y 11.7 μs, respectivamente. Se observaron algunas no linealidades en la magnitud de la señal, como un pico al inicio de la transición, a medida que la resistencia de carga disminuía. Por otro lado, el tiempo promedio de caída fue de 10.9 μs, con tiempos mínimos y máximos de 0.4 μs y 11.3 μs, respectivamente. En general, tanto los tiempos de subida como los de caída aumentaron ligeramente a medida que la resistencia de carga aumentaba.
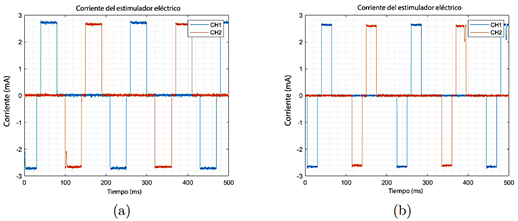
Los nombres deben ser abreviados utilizando solo las iniciales. Las amplitudes y los períodos generados por el MSES coinciden estrechamente con los configurados en la interfaz de usuario, como se muestra en la Figura 8, que ilustra una secuencia de estímulos generados en los canales uno y dos, con variaciones en algunos parámetros del estímulo. En la Figura 8a, los valores para Tp, Tn y la magnitud fueron 40 ms, 40 ms y 2.72 mA, respectivamente, mientras que en la Figura 8b, estos valores fueron 25 ms, 25 ms y 5.26 mA. El período total (T), que se estableció igual a Tr para esta prueba, fue de 100 ms. Además, la Figura 8 demuestra la ausencia de interferencia entre canales durante la estimulación secuencial en los canales uno y dos.
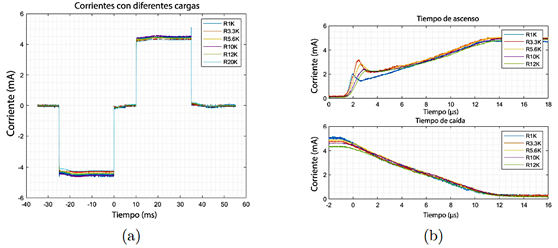
Figura 7 Parámetros de la forma de onda del estímulo para diferentes resistencias de carga: (a) Estabilidad de la corriente de la forma de onda del estímulo bifásico, (b) Tiempos de subida y bajada para una magnitud de estímulo de 5 mA
Prueba de aplicación
Los eventos de contracción y relajación de los dedos, junto con su relación con las dos secuencias de estimulación propuestas, fueron analizados utilizando las señales registradas por el guante sensorado para los participantes #1 y #2 (Figura 9. En general, los datos de los sensores demostraron que los patrones específicos de movimiento de los dedos están principalmente influenciados por la región estimulada, con menor influencia de la secuencia de estimulación (R1 → R2 → R3 o R2 → R3 → R1). Por ejemplo, en el participante #1, la estimulación de R2 causó predominantemente la contracción del dedo medio y tendencias de relajación en los dedos anular y meñique. Este patrón se observó tanto en las repeticiones de la secuencia R1 → R2 → R3 (Figura 9a) como una vez en la secuencia R2 → R3 → R1 (Figura 9b). Las secuencias de estimulación que comenzaban en R2 (desde el estado de reposo) no generaban señales asociadas con la relajación de los dedos anular y meñique. Además, la estimulación de R3 indujo la contracción de los dedos anular, medio y meñique en ambas secuencias en el participante #1. Por el contrario, la estimulación de R1 generalmente mostró un efecto de relajación, particularmente cuando cualquier dedo estaba previamente contraído. Este efecto fue evidente en la secuencia R2 → R3 → R1 (Figura 9b) y durante la segunda estimulación de R1 en la secuencia R1 → R2 → R3 (Figura 9b). Cuando la estimulación comenzó en R1 (después del estado de reposo, Figura 9a), se observó un movimiento de contracción en el dedo anular. Los patrones de contracción observados en el participante #2 fueron similares a los notados en el participante #1.
En resumen, la secuencia de estimulación R1 → R2 → R3 (Figura 9c) provocó el siguiente patrón de movimientos: sin contracción de los dedos (R1) → contracción predominante del dedo medio (R2) → contracción predominante del dedo anular, con contracciones menos pronunciadas del dedo medio y meñique (R3). Por el contrario, la secuencia R2 → R3 → R1 (Figura 9d) produjo el siguiente patrón de movimientos: contracción predominante del dedo medio (R2) → contracción predominante del dedo anular, junto con contracciones menos pronunciadas del dedo medio y meñique (R3) → sin contracción ni relajación de los dedos previamente contraídos (R1). Los eventos de contracción predominante para ambos participantes y secuencias de estimulación se resumen en la Tabla 1.
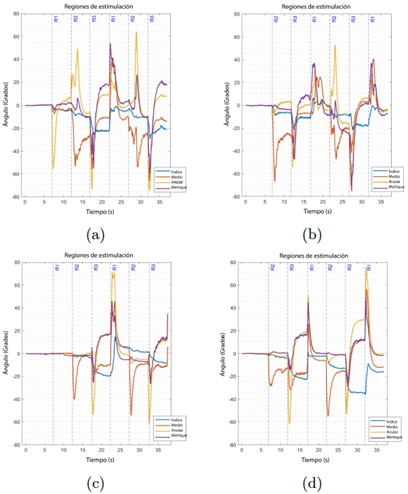
Figura 9 Ángulos de rotación obtenidos de los sensores de aceleración adheridos al guante sensorizado. Los patrones de movimiento corresponden a las secuencias R1 → R2 → R3 para (a) y (c), y R2 → R3 → R1 (b) y (d), y para los participantes #1 con (a) y (b) y #2 con (c) y (d)

Conlusiones
Este estudio presenta un prototipo para un sistema multicanal de estimulación eléctrica funcional (FES) capaz de entregar secuencias programables de señales bifásicas rectangulares multiplexadas a través de cuatro canales aislados, con control operativo mediante un teléfono inteligente.
El prototipo propuesto ofrece varios avances tecnológicos y de documentación en comparación con investigaciones previas sobre tecnologías de estimulación eléctrica similares. En primer lugar, el diseño actual emplea el microcontrolador inalámbrico ESP32, ampliamente accesible, rentable y bien soportado. Este controlador moderno simplifica el bloque de control electrónico del estimulador, superando las limitaciones de los diseños anteriores que dependían de controladores obsoletos, como se indica en [15], [20]. Esta modificación proporciona una alternativa reproducible para el bloque de control de las tecnologías de estimulación, lo que podría facilitar futuras investigaciones en control motor artificial. En segundo lugar, este estudio proporciona datos detallados sobre el rendimiento del circuito dentro del bloque generador de estímulos, una característica no abordada en los diseños previos de estimuladores eléctricos multicanal [15], [20].
Específicamente, la salida actual exhibió una fuerte dependencia del ajuste de las resistencias RAdj y Rvg (Figura 3). Aunque el circuito genera estímulos de corriente constante de manera eficaz, el nivel máximo de corriente y el rango dinámico de la etapa amplificadora están limitados por el aumento de la magnitud de la carga conectada a la salida. En tercer lugar, este prototipo introduce un esquema de multiplexación escalable utilizando una combinación de optoacoplador y prueba por canal. Esta topología permite una replicación sencilla para expandir el número de canales según sea necesario.
Además, las pruebas preliminares demostraron la capacidad del sistema para generar secuencias programables de contracciones musculares controladas.
Los resultados sugieren que el prototipo es adecuado para su integración en protocolos experimentales extendidos para estimulación muscular secuencial multicanal. El trabajo futuro se centrará en desarrollar una versión miniaturizada y embebida del prototipo en forma de un dispositivo portátil equipado con un acelerómetro. Esta iteración mejorada facilitará aplicaciones experimentales más amplias de la estimulación muscular secuencial multicanal, incluidos estudios sobre su impacto en condiciones como la enfermedad de Parkinson y el accidente cerebrovascular.

