











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO  uBio
uBio 
 Permalink
Permalink
1. Introducción
A nivel mundial, se estima que aproximadamente 1300 millones de personas viven con alguna forma de deficiencia visual y en el Ecuador se encuentran registradas 54244 personas con discapacidad visual (CONADIS, 2019). La natación es un deporte apto para cualquier edad y condición, son numerosos los beneficios producidos, los cuales se amplían en una persona con discapacidad visual. Las personas invidentes quienes practican natación usan el método denominado tapping el cual consiste en un bastón con goma en uno de sus extremos donde se dan pequeños golpes en la cabeza o parte superior de la espalda del nadador para informarle el momento de viraje o detención por su cercanía al borde, con el objetivo que no pierda velocidad ni tenga riesgo de golpearse en la pared, dicho sistema requiere de un entrenador calificado y preparación para coordinar los movimientos del nadador con los avisos emitidos por el entrenador. (FADEC, Federación Argentina de deportes para ciegos, 2010).
La empresa Samsung crea la idea de un gorro especial para invidentes que, a través de un dispositivo integrado en el mismo, recoge una vibración enviada por el entrenador al pulsar un botón mediante cualquier dispositivo móvil Android que utilice la tecnología Bluetooth y así le permite saber al nadador cuándo tiene que realizar el viraje (samsung, 2016). Uno de sus inconvenientes es, que no es un sistema autónomo, requiere de una persona que esté pendiente del nadador para enviar las alertas y aún se encuentra en fase de desarrollo, por lo tanto, en la actualidad no existe un dispositivo que ayude al nadador ciego a corregir su trayectoria y prevenir choques contra la pared de la piscina.
2. Contenido
2.1. Concepción del diseño del sistema de posicionamiento.
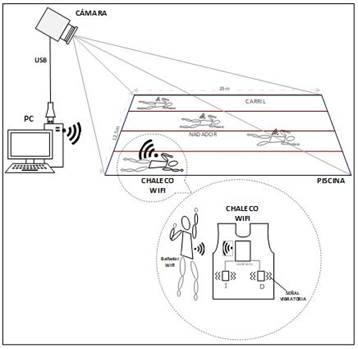
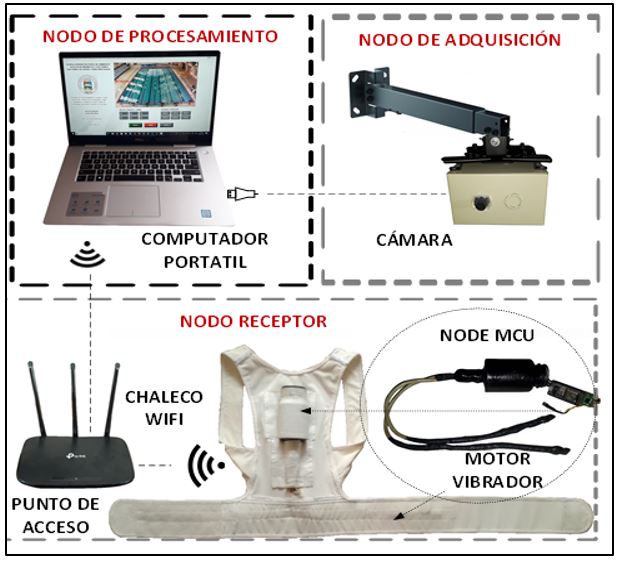
En la figura 1, se presentan los elementos constitutivos del sistema como son: la cámara USB ubicada en la parte superior de la piscina la cual se encargará de captar las imágenes y transmitirlas a través de su conexión USB al computador, que será el responsable del tratamiento de las imágenes recibidas, este a su vez será quien establecerá la comunicación con el chaleco WIFI donde se encuentra el dispositivo NodeMCU de conexión inalámbrica los cuales receptarán las alertas de proximidad enviadas por el software realizado en el computador.
Se tendrá 4 tipos de alertas de proximidad: alerta de límite superior e inferior que consistirá en una vibración de alerta en la espalda del nadador y alerta de proximidad de lado derecho e izquierdo que consistiera en la vibración del costado derecho o izquierdo respectivamente.
2.2. Diseño de bloques del sistema de posicionamiento
Consta de 3 bloques: adquisición de imágenes, procesamiento y recepción de datos como se presenta en la figura 2.
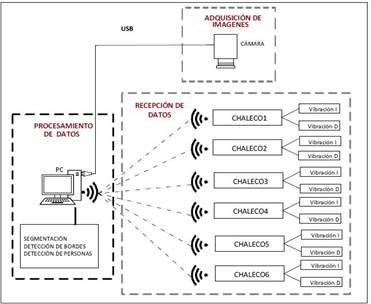
Bloque de adquisición de imágenes
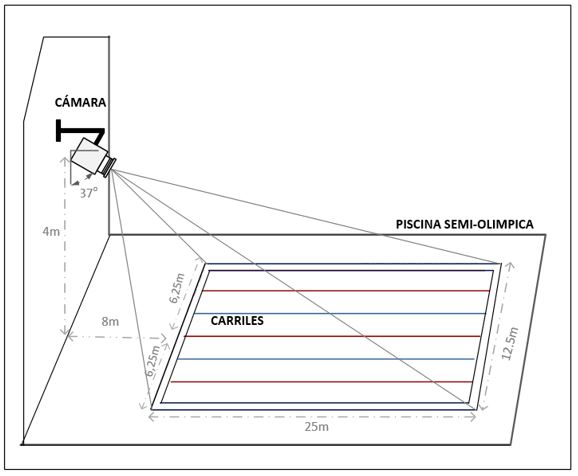
La presente etapa se captarán las imágenes a través de la cámara angular ubicada en el centro superior de la pared lateral izquierda de la piscina a 4m de altura y con un ángulo de inclinación de 37º grados, las mismas que serán transferidas a través de conexión USB al ordenador para su procesamiento.
Bloque de procesamiento de datos
En el ordenador se ejecutará el programa realizado en lenguaje Python que segmentará las imágenes para el reconocimiento de cada carril y los bordes de la piscina, el mismo se encargará de diferenciar los nadadores y enviar las señales de alerta hacia los actuadores en el chaleco.
2.3. Descripción de los elementos hardware del sistema
Luego del análisis y selección para la implementación del diseño del prototipo, se realiza una breve descripción de los elementos utilizados:
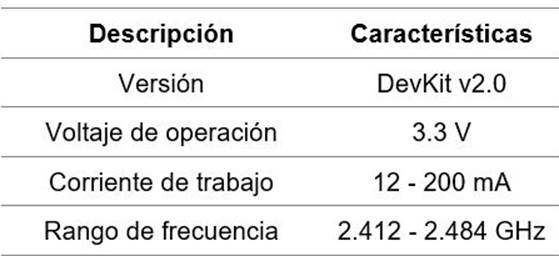
2.3.1. Cámara ELP USB500W02M
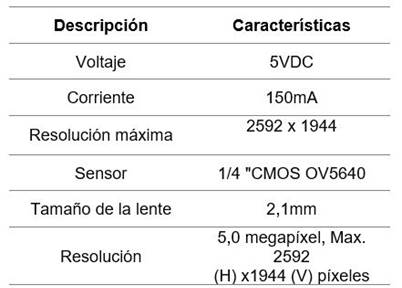
En la figura 3, se presenta un tipo de cámara USB, que utiliza sensores de imagen de alta calidad fabricados por, uno de los líderes mundiales en este campo de la electrónica. Debido a su tipo de conexión permite una mayor velocidad y fiabilidad en la transmisión de datos (ELP, 2019). Al no poseer una carcasa, se diseñó una, la misma que es capaz de soportar las condiciones como son calor y humedad presentes en la piscina. Las características técnicas de la cámara se presentan en la tabla 1.
2.3.2. NodeMCU DevKit v2.0
Es una tarjeta de desarrollo de código abierto basado en el popular chip ESP8266 como se muestra en la figura 4, que utiliza el lenguaje de programación LUA para crear un ambiente de desarrollo propicio para aplicaciones que requieran conectividad WIFI de manera rápida. Consta de: un regulador de alimentación, un chip USB-serial, una memoria flash de 1Mb para el almacenamiento de varios programas y 2 puertos Rx/Tx (GitHub, 2019). En la tabla 2 se describe las características técnicas principales.

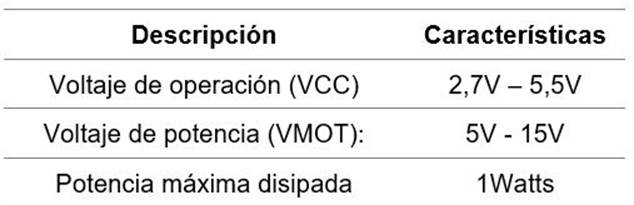
2.3.3. Drive TB6612FNG
Es un controlador o driver para motores DC, capaz de controlar hasta dos motores DC y suministrar 1.2 A por salida, como se muestra en la figura 5. Se pueden usar dos señales de entrada IN1 e IN2 para controlar los motores en uno de los cuatro modos de función: CW, CCW, freno corto y parada. Las dos salidas del motor A y B se pueden controlar por separado, y la velocidad de cada motor es controlada a través de una señal de entrada PWM con una frecuencia de hasta 100 kHz (ShopperWP, 2019). En la tabla 3 se muestra las características técnicas.

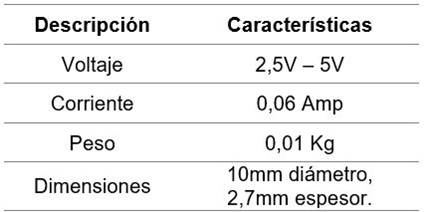
2.3.4. Mini motor vibrador
En la figura 6 se observa el motor que permite transmitir al usuario una sensación vibratoria. Su funcionamiento se basa en una carga ubicada en su eje, la cual al estar desbalanceada genera un cabeceo. Funciona entre 2V y 5V a mayor voltaje mayor vibración y consumo (CETRONIC, s.f.). Las características técnicas principales se muestran en la tabla 4.

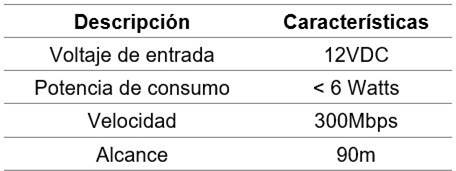
2.3.5. Punto de acceso
Es un dispositivo como se visualiza en la figura 7, que crea una red de área local inalámbrica WLAN, que puede ser una oficina o un edificio de grandes dimensiones. Un punto de acceso se conecta a un router, switch o hub por un cable Ethernet y proyecta una señal WIFI en un área designada (LINKSYS, 2018). En la tabla 5 se muestra las características técnicas.

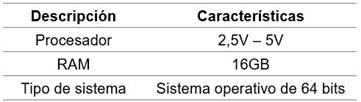
2.3.6. Procesador
Se utilizó un computador portátil Dell Inspiron 15700 octava generación con Windows 10 como se muestra en la figura 8, el cual brindo una capacidad de procesamiento y tiempos de respuestas aceptables. Y sus características como se muestra en la tabla 6.

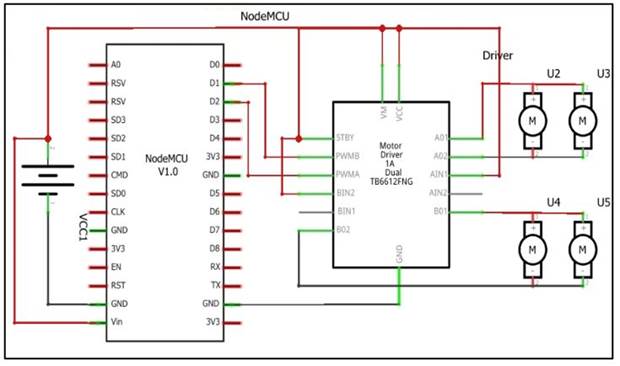
2.3.7 Esquema de conexión electrónica
La figura 9, presenta el esquema de conexión de los elementos que conforman la placa electrónica del módulo receptor. Las salidas D2 y D3 del NodeMCU se conectarán a las entradas PWMA Y PWMB deldriverTB6612FNg que se encuentran en el pin 1 y 7 respectivamente. Las entradas AI1, BI1 controlan el sentido del motor y estarán conectadas al pin positivo de la batería, las entradas AI2 y BI2 estarán conectadas al pin negativo. Las salidas AO1 y AO2 irán conectadas a los dos motores vibradores ubicados en el lado derecho que se activarán con la entrada PWMA y las salidas BO1 y BO2 irán conectados a los dos motores vibradores ubicados en el lado izquierdo que se activarán con la entrada PWMB Los terminales Vin del NodeMCU, Vin y Vcc deldriverirán conectados al positivo de la batería, el GND del NodeMCU y del driver estarán conectados al negativo.
2.4 Herramientas software de desarrollo
A continuación, se realiza un detalle de las herramientas de software utilizadas para el desarrollo de los programas del prototipo:
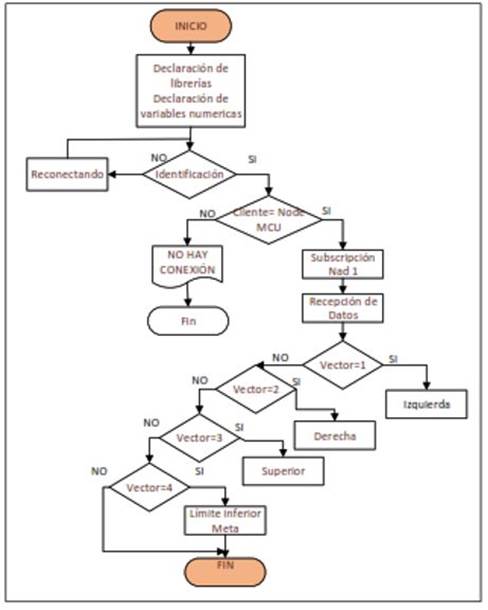
2.4.1 IDE Arduino 1.8.3
El entorno de programación de Arduino es de código abierto basándose en un lenguaje de programación C++, es compatible con cualquier sistema operativo. Cuenta con librerías que facilitan la interacción con el hardware y el manejo de funciones para el desarrollo de las operaciones (ARDUINO, 2017). En la figura 10 se presenta el diagrama de flujo que describe el funcionamiento del programa. A continuación, se detalla el algoritmo del diagrama de flujo presentado:
Se declaran las librerías , ; constantes como: el SSID de la red, contraseña, IP del servidor, y variables que permitirán al programa la conexión con el servidor, recepción y análisis de los datos recibidos.
Se crea un cliente con la sentencia WIFIClient() donde se procede a comparar si el cliente es un módulo NodeMCU y para este cliente se crea una instancia con PubSubClient ().
Se definirá una dirección de servidor y un puerto de comunicación con la función client.setServer(), luego se definirá una función donde de procesaran los mensajes recibidos tras la suscripción al tema con la función client.setCallback(): Con la función client.subscribe() este se suscribirá al tema nad1 en el cual se publicarán los mensajes que contendrán valores de la trayectoria del nadador 1 y las distintas alarmas que prevendrán al nadador para corregir su trayectoria.
Después se realiza la comparación de los valores recibidos, se transmitirá un valor analógico hacia los actuadores que se traducirá en la vibración para que la persona no vidente distinga que tan próximo está a los límites del carril.
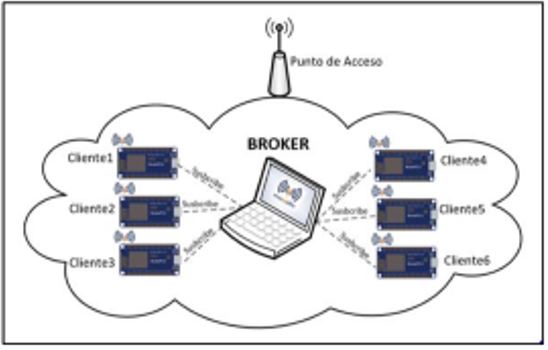
2.4.2 Servidor MQTT o Mosquitto 3.1.1
Como se presenta en la figura 11, una red de área local inalámbrica será el medio de comunicación entre el servidor o Bróker Mosquitto instalado en la computadora personal y los clientes o nadadores representados por los dispositivos NodeMCU. El puerto de red que utiliza este protocolo para la comunicación es el 1883. Luego se ejecutará el programa a través de la ventana de comandos CMD, para ello se generará un script mosquitto.bat el cual habilita el puerto de enlace y establece comunicación con los nadadores a través del punto de acceso.
2.4.3 Captura de imagen
En la figura 12 se presenta el diagrama de flujo utilizado para la captura de imagen.

A continuación, se describe el diagrama de flujo presentado:
Se establece las variables implícitas directamente en el funcionamiento del programa, estas variables son numéricas inicializadas en cero, necesarias para detectar los límites inferiores y superiores, así como también la detección de la meta.
Se declara las variables de pre-procesamiento de imágenes y las técnicas de visión artificial, estas variables son matrices cuyos elementos son ceros en su totalidad, y sirven como almacenamiento de diferentes imágenes.
La captura de imagen se realiza al configurar la cámara, asignándole una dirección, esta variable inicial será una imagen, que posteriormente será redimensionada para facilitar el procesamiento y acortar el tiempo de ejecución del programa.
Después de redimensionar la imagen se hace la conversión a los distintos formatos de color para el análisis, como BGR y HSV, así como escalas en grises.
Se asigna coordenadas a los 6 carriles por separado para establecer un área de interés, rellenando la imagen con líneas y puntos establecidos con un análisis previo. También se aumenta el brillo de la imagen, se aísla y aumenta como un escalar.
2.4.5 Seguimiento y envío de datos
En la figura 13 se describe el diagrama de seguimiento y envío de datos:
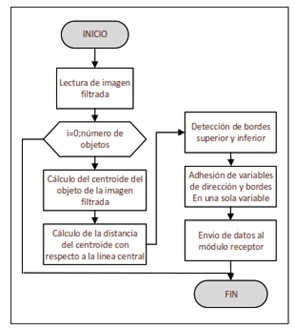
Se describe cada uno de los pasos del diagrama de la figura 13:
Cálculo del punto central o también llamado centroide, este punto es una coordenada cuyas componentes son i y j.
Con el punto central se realiza una extensión sumando y restando a partir de estas 70 unidades de pixeles en el eje horizontal y se almacena en una imagen.
Esta imagen sirve para hacer una operación and entre la misma y una imagen que contenga una línea que será la que esté trazada en la mitad de cada carril y se calcula la distancia entre este punto y el centroide.
Con esta distancia calculada se hace un cambio de escala y se envía al módulo receptor, dentro de este también va la dirección y la detección del límite superior e inferior en cada carril, así como también la posición en la meta de la competencia.
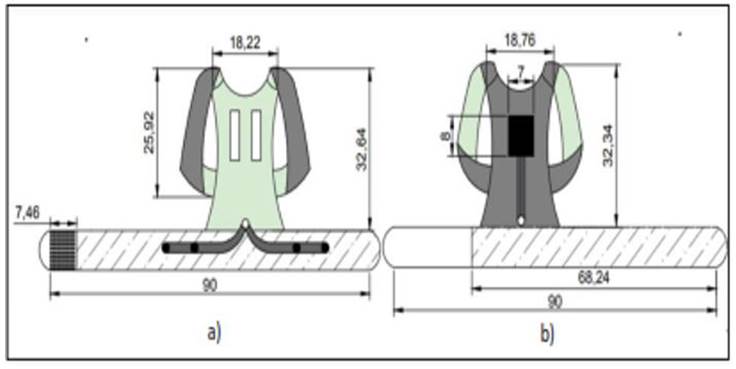
2.4.6 Diseño de la estructura de chaleco WIFI
En la herramienta AutoCAD 2017, se realizó el diseño del chaleco WIFI. En la figura 14 se presenta el diseño de vista frontal (figura 14a) y posterior (figura 14b) el cual se sujeta en los hombros y en la zona abdominal por una banda elástica. En la figura 15 se observa el chaleco implementado. En la zona de la espalda tiene un bolsillo el cual aloja un cilindro de 10cm de altura y 5cm de diámetro donde se encuentra las baterías y el circuito del módulo receptor, de la misma saldrán 2 cables hacia los motores vibradores ubicados en la faja abdominal del chaleco.

2.4.7. Diseño de la interfaz gráfica del sistema
Como se presenta en la figura 16 se realizó el diseño de una interfaz gráfica amigable con el usuario, la cual se divide en tres partes: informativa, visualización y la botonera. El usuario a través de una ventana gráfica podrá ir visualizando la piscina, las trayectorias y el seguimiento realizado a los nadadores, en el cual se podrá evidenciar la ejecución del programa, cuando se presione el botón inicio y todo este correcto el borde de la piscina se enmarcará de color verde, y se mostrará el mensaje “ejecutando”, si el programa no se ha inicializado, o se encuentra en paro la piscina se enmarcará de color rojo y se mostrará el mensaje “sin ejecutar”.

El menú conta de 5 opciones las cuales permiten:
Botón inicio:Permite inicializar el programa una vez seleccionado los carriles a realizar el seguimiento. Botón de paro:Permite el paro del programa y reinicio de variables. Botón salir:Permite salir del programa. Botones de conexión:Permiten la comprobación de la conexión del sistema por medio de una ligera vibración. Selección de carril:Permite la selección, del carril o los carriles que se desea hacer el seguimiento.
2.4.7 Implantación del sistema
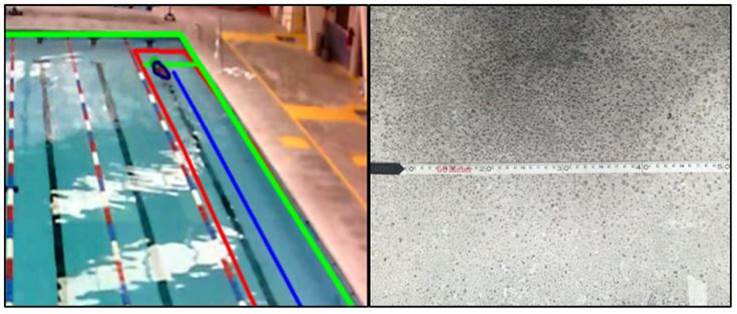
La implantación del sistema se realizó en las instalaciones de la Escuela Superior Politécnica de Chimborazo (ESPOCH) en la piscina semiolímpica del departamento de educación física, en la figura 17 se presenta el sistema implementado que consta de los siguientes nodos: adquisición, procesamiento y receptor. Para la ubicación del nodo de adquisición se realizó un análisis de la localización de la cámara, donde la ubicación que mejor se ajustó con respecto a la infraestructura de la piscina y al ángulo de visión de la cámara fue a 8m con respecto al borde izquierdo central de la piscina, a una altura de 4m y un ángulo de inclinación de 37º. Ubicación que permitió la visualización completa del área de la piscina, como se muestra en la figura 18.
2.5 Pruebas y resultados
Las pruebas consistieron en medir: la estabilidad del prototipo, la integridad y tiempos de comunicación, el consumo total de corriente y para finalizar el análisis de costos del prototipo de sistema implementado, a continuación, se describe cada una de ellas.
2.5.1 Estabilidad del sistema
El objetivo de estas pruebas es evaluar la variabilidad del prototipo, para lo cual se tomaron 10 muestras del desplazamiento que tuvo un mismo nadador a una intensidad lumínica de 40000 luxes, distancias que fueron comparadas con un equipo patrón. Se determinó el error absoluto, la media ( ) y el coeficiente de variación (() mediante análisis probabilístico con la herramienta Excel 2016. Para ello se dividió en dos pruebas: desplazamiento-detección a lo largo del carril y desplazamiento-alerta ancho carril.
2.5.1.1 Pruebas desplazamiento-detección a lo largo del carril
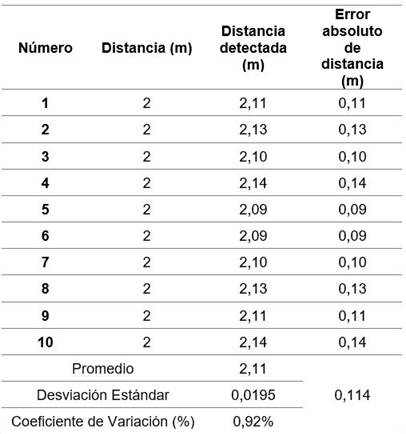
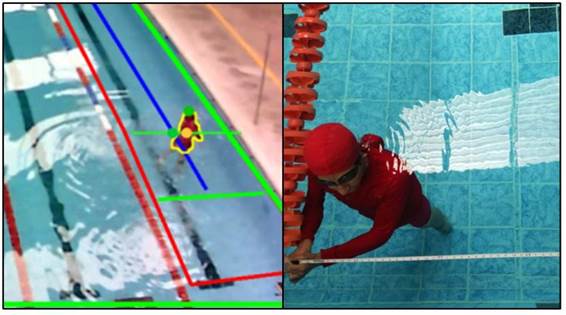
La prueba consistió en ubicar un indicador a una distancia de referencia de 2m con respecto al límite inferior de la piscina, para luego ser comparada con la distancia a la cual el sistema detecto al nadador como se presenta en la figura 19.

En la tabla 7 se presenta los datos obtenidos de la prueba, con los cuales se determinó un error mínimo de distancia de 0,09m, error máximo de 0,14m y un coeficiente de variación de 0,92%, valor menor al 10%. Por lo que se concluye que la repetitividad en la detección de un cuerpo a la misma distancia es homogénea representando un sistema estable (Llamosa, Mesa, & Marcela, 2007).
2.5.1.2 Prueba desplazamiento-alerta ancho carril
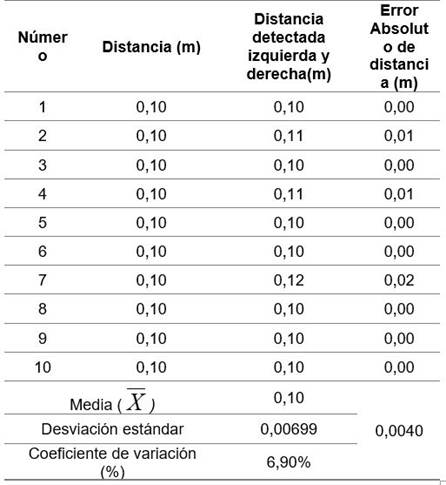
Esta prueba consistió en ubicar una referencia de +/- 10 m con respecto a la línea central del carril de la piscina, para luego ser comparada la distancia a la cual el nadador se desplazó con la alerta vibratoria recibida r como se presenta en la figura 20.
En la tabla 8 se presenta los datos obtenidos de la prueba, con los cuales se determinó un error máximo de 0,02m y un coeficiente de variación de 6,9%, valor menor al 10%. Por lo que se concluye que el prototipo implementado presenta estabilidad en la detección y envió de alertas. (Llamosa, Mesa, & Marcela, 2007).
2.5.2 Pruebas de tiempo de procesamiento
El objetivo de esta prueba es medir el tiempo de procesamiento transcurrido durante la ejecución del código de programación. Para lo cual se incluyó un código mediante programación mismo que devuelve el valor de tiempo en ms que le tomó al sistema procesar cada imagen. Para estimar el tiempo promedio en el que el sistema realiza el procesamiento se tomaron muestras de 3 minutos para cada carril obteniéndose 1440 muestras, considerando que el sistema procesa 8 imágenes por segundo con una resolución de 1280x720 pixeles. En la figura 21 se visualiza la obtención de datos.
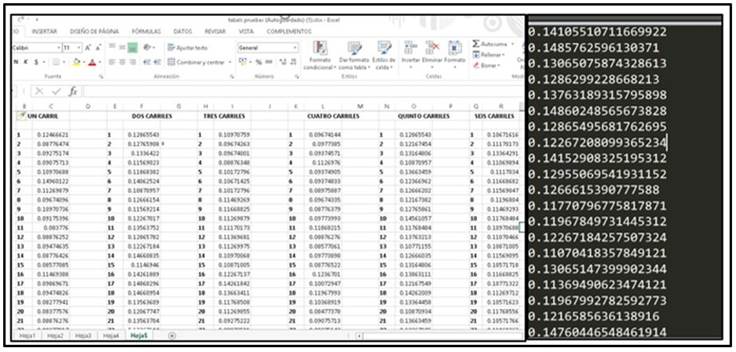
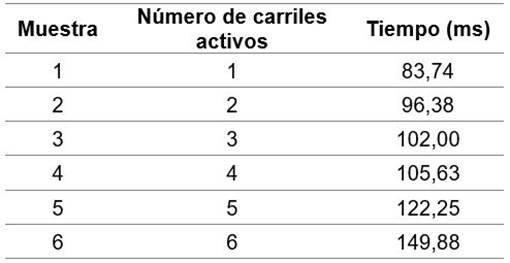
Como se puede apreciar en la tabla 9 se presentan los promedios obtenidos, del cálculo estadístico, donde el tiempo mínimo de procesamiento del programa es de 78,12ms, tiempo que refleja la ejecución del programa tras la apertura de la interfaz gráfica y el tiempo máximo obtenido es de 141,88ms al realizarse el seguimiento de los nadadores en los 6 carriles. Se concluye que aún el mayor tiempo de procesamiento no afecta el funcionamiento adecuado del sistema el cual no produce retardos en la ejecución del programa manteniéndose una visualización fluida de video.
2.5.3 Prueba de rango y tiempo de comunicación inalámbrica
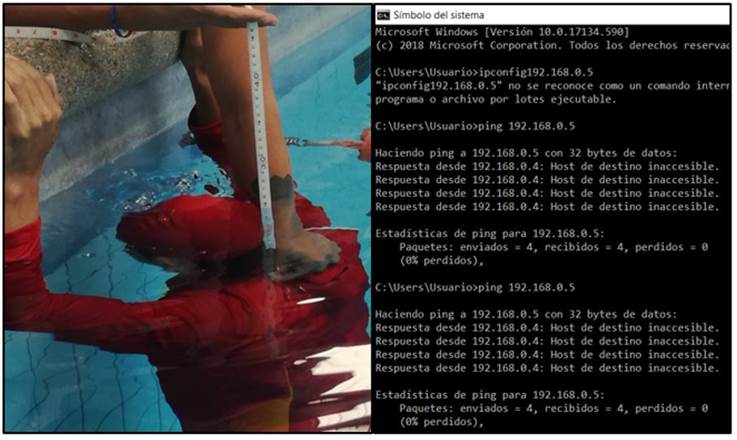
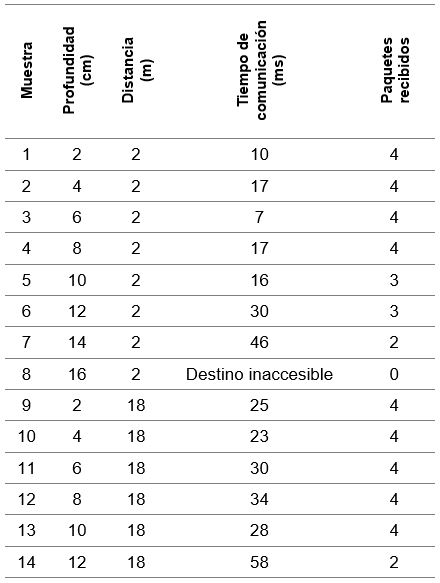
El objetivo de esta prueba es determinar hasta que distancia y profundidad el nodo de procesamiento mantiene comunicación con el nodo receptor y cuál es su latencia, mediante el comando ping ejecutado en elcomand prontdel computador (Navas, 2018). La prueba consistió en variar la distancia del módulo receptor respecto al punto de acceso WIFI de 2 a 18 metros y sumergir el dispositivo como muestra en la figura 22 comprobando así la distancia y profundidad máxima a la que el módulo puede encontrarse para mantener una comunicación integra y con tiempos de comunicación bajos. Se tomaron 15 muestras presentadas en la tabla 10.
2.5.4 Pruebas de funcionamiento del sistema incluyendo variables
Se realizaron dos pruebas, la primera, con el objetivo de determinar el error entre el desplazamiento y la recepción de las alertas vibratorias, directamente proporcional a la velocidad de cada nadador, con esta prueba se pudo encontrar una expresión que permita calcular el desplazamiento adicional que tendrá el nadador antes de ser alertado cuando haya cruzado el límite superior o inferior. En la segunda prueba se verifica la detección del nadador en la piscina con el objetivo de comprobar errores de detecciones, generación de falsos positivos y negativos tomando como variable la luz ambiental.
2.5.4.1 Prueba detección-desplazamiento-alerta limites superior e inferior.
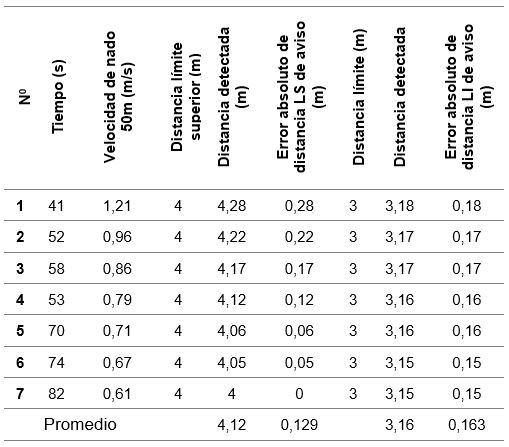
Consistió en cronometrar los tiempos de los nadadores y medir el desplazamiento adicional que tuvo el nadador tras el cruce de su centroide por el límite superior fijado en 4m o el límite inferior fijado en 3m, antes de ser alertado, para esta prueba participaron 7 nadadores los cuales tienen distintas velocidades. En la figura 23 se observa cómo se tomaron las muestras
Como se muestra en la tabla 11, hay un error de desplazamiento medio de 0,12m con un rango de variación de 0 a 0,28m con respecto a la distancia fijada en el límite superior. Para el límite inferior se encontró un error de 0,16m con un rango de variación de 0,15m a 0,18m. En los dos casos se tiene un mínimo error de desplazamiento por lo cual se concluye que el sistema es confiable y no afecta al desenvolvimiento ni a la seguridad del nadador, ya que cada nadador calculará para sí mismo el número de brazadas que le tomará llegar al borde tras recibir la alerta de proximidad.
2.5.4.2 Funcionamiento del sistema considerando velocidad máxima
Después de la comprobación de los tiempos de procesamiento en la tabla 9 y de comunicación en la tabla 10, se calcula un tiempo máximo de respuesta del sistema de 230ms, con el objetivo de comprobar el desplazamiento máximo posible que pudiese tener un nadador antes de ser alertado tras su cruce por uno de los límites configurados en el sistema. Para poder predecir el error de desplazamiento que podría tener un nadador dependiendo de su velocidad, se utilizó una recta de ajuste como se muestra en el gráfico 1 y 2, obteniéndose la ecuación de la recta para el error de distancia de aviso en el límite superior e inferior de los datos obtenidos en la tabla 11.
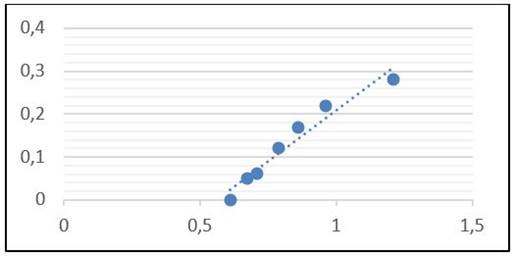
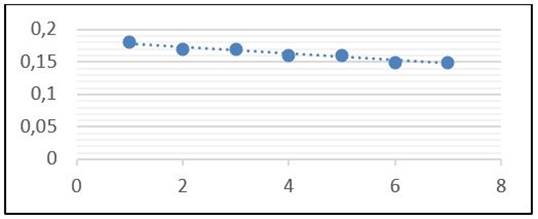
Para los datos de la tabla 7 con respecto al límite superior, mostrados en la gráfica 1 se obtuvo la ecuación (1) y con respecto al límite inferior la ecuación (2).
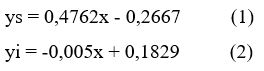
La velocidadrecordestablecida por el nadador olímpico Michael Phelps es de 2,8m/s (BBC, 2017), al remplazar este valor en las ecuaciones (1) y (2), se calcula para el límite superior un error de 1,05m y para el límite inferior 0,169m. Por lo tanto, se concluye que aún con la velocidad del nadador olímpico más rápido del mundo el sistema es capaz de enviar alertas que corregirán su trayectoria y evitarán colisiones cumpliéndose los objetivos del sistema implementado.
2.5.5 Pruebas de detección de personas con respecto a la iluminación.
Se utilizó un multímetro con luxómetro de la marca ESUN modelo EM5510 con el que se tomaron 5 muestras en diferentes horas del día con distintas condiciones climáticas por cada carril, obteniéndose los datos a continuación representados que reflejaron no detecciones, falsos positivos y negativos.
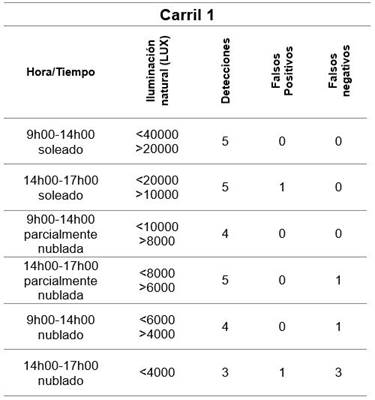
2.5.5.1 Prueba iluminación carril 1
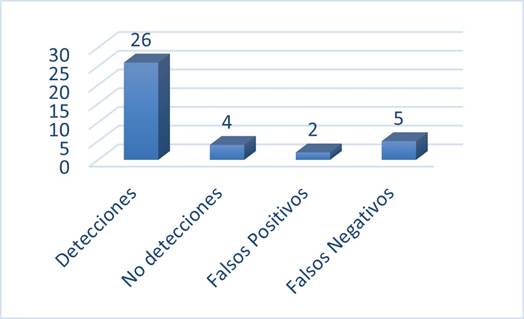
En la tabla 11 se exponen los resultados de la prueba, donde se observa que existió un total de 20 detecciones sin errores, 6 detecciones que presentan falsos positivos y negativos, 4 pruebas en las que no se detectó al nadador, errores provocados por la falta de luz y la distancia de la cámara al borde superior de la piscina, resultados representados en el gráfico 3
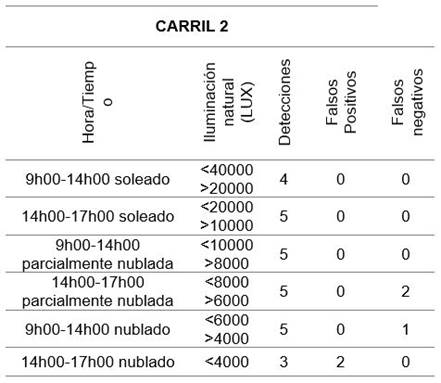
2.5.5.2 Prueba iluminación carril 2
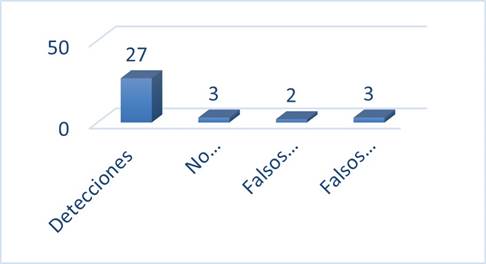
Como se puede apreciar en la tabla 13 se obtuvo en el carril 2 un total de 21 detecciones sin errores, 6 detecciones que presentan falsos positivos y negativos, 3 pruebas en las que no se detectó al nadador, resultados expuestos en el gráfico 4.
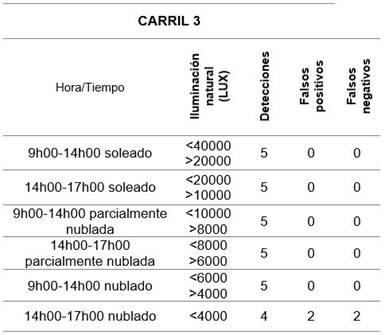
2.5.5.3 Prueba iluminación carril 3
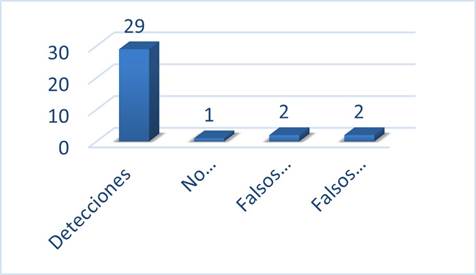
En la tabla 14 se exponen las muestras tomadas en el carril 3, se observa que existió un total de 26 detecciones sin errores, 3 detecciones que presentan falsos positivos y negativos, una prueba en las que no se detectó al nadador, resultados expuestos en el gráfico 5.
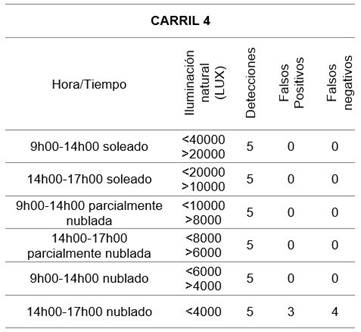
2.5.5.4 Prueba iluminación carril 4
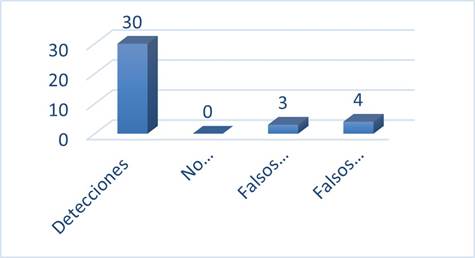
En la tabla 15 se exponen las muestras tomadas en el carril 4 obteniéndose un total de 25 detecciones sin errores, 3 detecciones que presentan falsos positivos y negativos, una prueba en las que no se detectó al nadador, como se aprecia en el gráfico 6.
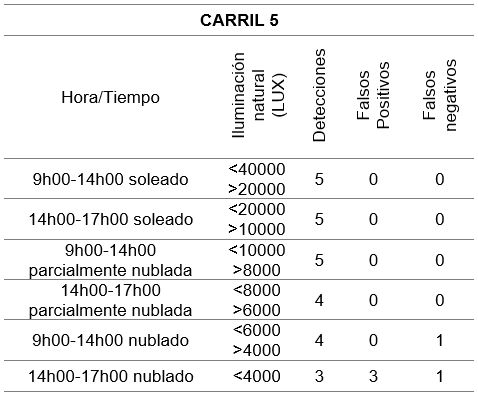
2.5.5.5 Prueba iluminación carril 5
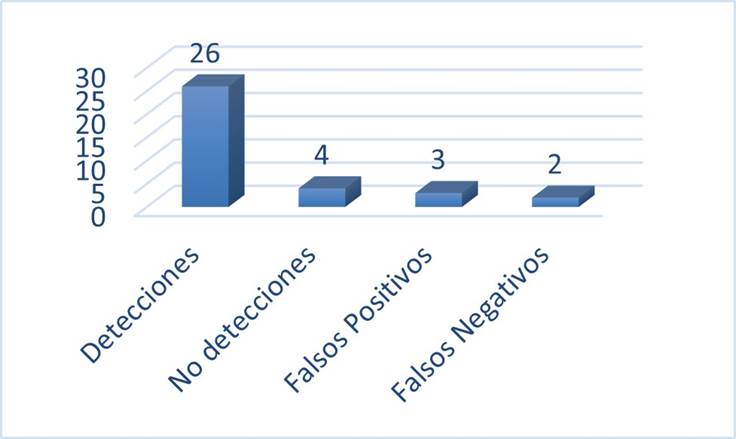
En la tabla 16 se exponen las muestras tomadas en el carril 5 obteniéndose un total de 26 detecciones sin errores, 3 detecciones que presentan falsos positivos y negativos, una prueba en las que no se detectó al nadador, como se aprecia en el gráfico 7.
2.5.5.6 Prueba iluminación carril 6
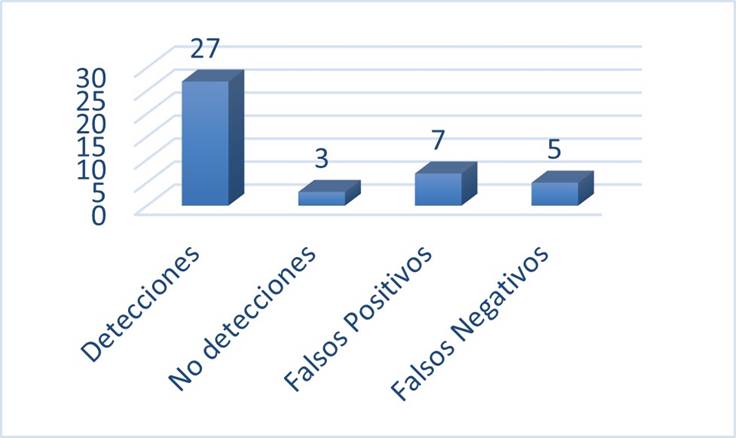
Como se muestra en la tabla 17, se obtuvo un total de 27 detecciones de las cuales 8 presentaron errores de falsos positivos y negativos, en 3 ocasiones no se realizó la detección del nadador. Resultados expuestos en la gráfica 8.
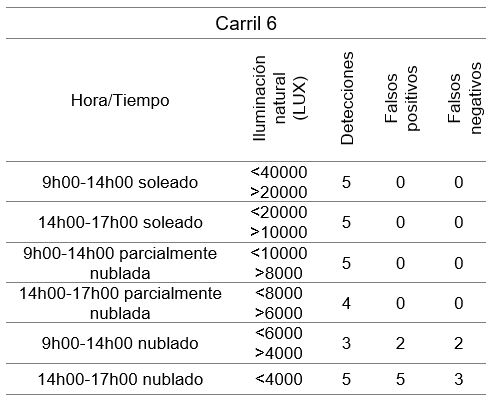
Se concluye que el carril 6 es el que presenta más errores en la detección por debajo de los 6000 luxes, el decremento en la cantidad de luz natural, el ángulo de incidencia de luz proveniente de los tragaluces y el movimiento turbulento del agua generan reflejos que confunden la detección del nadador produciendo errores como son falsos positivos y negativos a lo largo del desplazamiento del nadador por el carril.
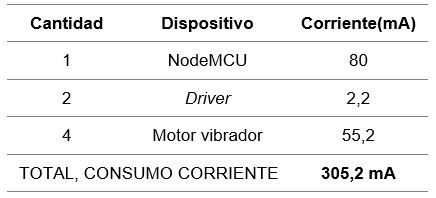
2.5.6 Consumo de corriente del prototipo de sistema
Se realizaron mediciones de corriente y de voltaje con la ayuda del multímetro digital ESUN modelo EM5510, como se muestra en la figura 24, comprobándose así los valores de funcionamiento descritos en las hojas de datos

Como se muestra en la tabla 18, la corriente total consumida por el sistema en funcionamiento continuo es de 305,2mA para lo cual se utilizó un banco de 4 pilas de 4,8v y 800mAh. Tras cálculos se estima que el dispositivo en funcionamiento continuo tendrá 2 horas de autonomía aproximadamente, en pruebas físicas el módulo receptor tuvo en promedio una duración de la batería de 6 horas puesto que los motores vibradores se utilizan solo para alertas momentáneas, el consumo constante que tendrá la batería es 82,2mA que es la corriente que consume el NodeMCU y eldriverque controla los motores. Por lo que se concluye que el módulo receptor presenta una autonomía suficiente para mantenerse en funcionamiento continuo durante los entrenamientos y competiciones de los nadadores.
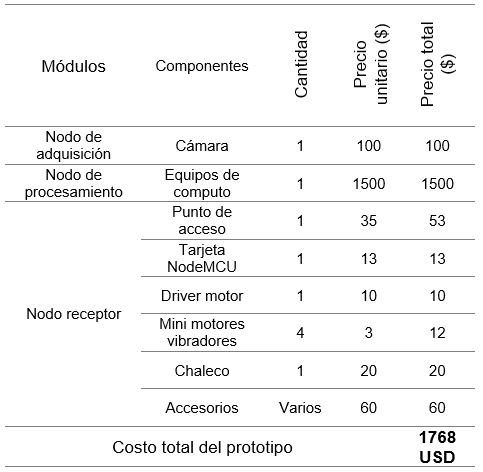
2.5.7 Análisis de costos
En la tabla 19 se muestra el análisis económico dividido en módulos que detallan sus componentes, la cantidad y sus respectivos precios de la implementación del sistema. Donde se observa que el sistema implementado tiene un costo total de 1768 USD. Que no se puede comparar el valor de un sistema comercial ya que hasta la presente fecha no existe un sistema con similares características o investigaciones en desarrollo que relacionen a la temática que se aborda en esta investigación.
3. Conclusiones
Se implementó un prototipo de sistema de posicionamiento, usando visión artificial y redes de actuadores, para disminuir el error de trayectoria en personas invidentes dentro de piscinas, el cual consta de tres nodos de: adquisición, procesamiento y recepción, basado en comunicación WIFI y que se constituye como el primer dispositivo en su tipo. Para esto se realizó un análisis de la localización y ángulo de visión de la cámara con respecto a la infraestructura de la piscina: obteniendo como resultado 8 m con respecto al borde izquierdo central de la piscina, una altura de 4m y un ángulo de inclinación de 37º
De las pruebas desplazamientos de un nadador a lo largo y ancho del carril para determinar la estabilidad del prototipo, por medio del coeficiente de variación, se estimó valores de 0,92% a 6,9% para cada caso. Que son menores al 10% permitido por la norma ISO 17025, lo que permite concluir que el prototipo implementado presenta estabilidad en su diseño.
De las pruebas se determinó que, el tiempo mínimo de procesamiento de imágenes que emplea el prototipo es de 83,74ms al supervisar un solo carril y de 149,88ms cuando supervisa todos los carriles en una piscina. Por lo cual se concluye que aún el mayor tiempo de procesamiento no afecta el funcionamiento del prototipo sin generar retardos en la ejecución y manteniendo una visualización fluida de video.
De las pruebas de comunicación entre el nodo de procesamiento y el módulo receptor se determinó que se puede realizar a distancias de hasta 18m y con una profundidad bajo el agua de 12cm sin perdidas y con una latencia promedio de 58ms. Lo que se concluye que el prototipo implementado cumple con los requerimientos establecidos para esta investigación.
De las pruebas se determinó que el prototipo implementado presenta un error mínimo en la detección de desplazamiento de un nadador de 0,12m con respecto a la distancia fijada en el límite superior y de 0,16m para el límite inferior de una piscina. Por lo cual se concluye que el sistema es confiable y no afecta al desenvolvimiento ni a la seguridad del nadador.
De las pruebas se determinó que, el carril 6 de la piscina es el que presenta una mayor cantidad de errores en la detección cuando la iluminación ambiente se mantiene por debajo de los 6000luxes. Debido al decremento en la cantidad de luz natural, el ángulo de incidencia de luz proveniente de los tragaluces y el movimiento turbulento del agua genera reflejos que afectan al prototipo y alteran la detección del nadador por el carril.
De los resultados se estableció que, en promedio, el módulo receptor puede mantener un funcionamiento continuo de 6 horas, tiempo similar en cuanto a independencia de carga de equipos comerciales de uso común. Se concluye que la independencia de carga permite el uso del prototipo implementado durante los entrenamientos y competiciones de los nadadores.
En el análisis económico implementado tiene un costo total de 1768 USD, actualmente. Que no se puede comparar el valor de un sistema comercial ya que hasta la presente fecha no existe un sistema con similares características o investigaciones en desarrollo que relacionen a la temática que se aborda en esta investigación.

