











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO  uBio
uBio 
 Permalink
Permalink
Introducción
Las personas durante su vida cotidiana viven expuestas a sufrir lesiones en las diferentes articulaciones del cuerpo humano, tanto en las extremidades superiores como en las extremidades inferiores. Este problema ocurre debido al desgaste natural del cuerpo, accidentes o lesiones al practicar actividades deportivas, las más comunes son fracturas, dislocaciones, desgarres, luxaciones, esguinces, atrofias o incapacidad de mover la articulación afectada (Brad Walker, 2010).
La rodilla es la articulación más importante del cuerpo humano, pues permite acciones como caminar y correr, lo cual la hace sensible a sufrir impactos directos de alta energía, generando traumatismos que causan lesiones muy complejas, que ameritan rehabilitación o intervención quirúrgica. Cuando se ha realizado una operación inmediatamente se requiere de rehabilitación, ya sea activa o pasiva (Paolo, 2012).
Las afectaciones de rodilla más frecuentes, según la edad y sexo son: en niños y adolescentes padecen de osteocondrosis y osteocondritis de preferencia en hombres, menisco lateral discoide y luxación de la rótula sobre todo en mujeres. Los jóvenes sufren de lesión en meniscos o ligamentos, con más frecuencia en varones y condropatía, en mujeres. Los adultos y ancianos soportan lesiones meniscales degenerativas, enfermedades inflamatorias o metabólicas como artritis reumatoide, condrocalcinosis y gota (Martínez, 2015).
A nivel mundial las lesiones deportivas son consideradas un serio problema, pues solo en Estados Unidos durante el año 2014 se registró lesiones deportivas de mucho riesgo, donde el 55% son de rodilla (Walker, 2018). En España, mediante un estudio de casos se pudo determinar que el 69,3% de lesiones se produce en el miembro inferior (García González et al., 2015). En un estudio de las lesiones deportivas en atletas de alto rendimiento de la provincia Las Tunas se encontró un porcentaje elevado de lesiones en los miembros inferiores con un 47,7% producido por practicar deportes como el futbol, hockey y taekwondo (Barceló, 2014).
En el Ecuador, según el registro de egresos hospitalarios del 2014, el diagnóstico de luxación, esguince y torcedura de la rodilla tuvo un total de 2973 salidas hospitalarias, de las cuales el 72,8% son hombres y el 27,2% son mujeres. Del total de resultados, el 73% está entre las edades de 25 a 64 años y el resto se reparte entre las demás edades (INEC, 2014).
En la actualidad, existen diferentes técnicas de rehabilitación, una de estas es el movimiento pasivo continuo o MPC, el cual consiste en proporcionar desplazamientos regulares mediante una máquina y, según estudios realizados, este proceso mejora en un rango de 2 a 5% la amplitud de movimiento flexión-extensión en comparación a personas que no recibieron este tratamiento (Harvey, Brosseau y Herbert, 2014). Aunque en el mercado sí existen dispositivos para la rehabilitación postoperatoria de rodillas, sin embargo, estos tienen un alto costo de adquisición y mantenimiento.
Después de realizar una indagación sobre estos equipos se encontró que, en la Universidad Tecnológica de North Bangkok se desarrolló el trabajo siguiente “Design and Development of a Smart Continuous Passive Motion Device for Knee Rehabilitation”. Este permite controlar todo el dispositivo mediante una pantalla LCD táctil de siete pulgadas y opera de cuatro modos: manual, auto run, intermitente y progresivo (Umchid y Taraphongphan, 2016). En la Universidad de Cuenca, los autores Pablo Loja y Andrés Ordoñez, diseñaron y construyeron un exoesqueleto de rodilla robótica para asistir a pacientes en etapas de rehabilitación con discapacidad moderada o inferior, este equipo es controlado mediante una aplicación móvil, se comunica mediante Bluetooth además contiene una base de datos, que permite inspeccionar las rutinas de rehabilitación por medio de caminata asistida (Loja Duchi y Ordóñez Torres, 2016). Por último, en la Escuela Superior Politécnica del Ejercito se desarrolló el tema “Diseño y construcción de un sistema de rehabilitación pasivo para la rodilla”, este se controla mediante una pantalla táctil que posibilita un modo manual y otro automático para ejecutar las rutinas de rehabilitación (Urgilés, 2015).
En base a las investigaciones analizadas se propone el desarrollo de un prototipo de robot para rehabilitación de pacientes con lesiones en rodilla controlado mediante dispositivos móviles, y que permita enviar datos por medio de Bluetooth al microcontrolador para producir el movimiento flexión-extensión.
El objetivo del presente trabajo está encaminado a diseñar e implementar un prototipo de robot el cual proporcione un rango de movimiento de 0° a 120°, soporte un peso máximo de 150kg, sea ajustable y de fácil operación para la rehabilitación de pacientes con lesiones en rodilla, controlado mediante dispositivos móviles.
Noción integral del prototipo de rehabilitación
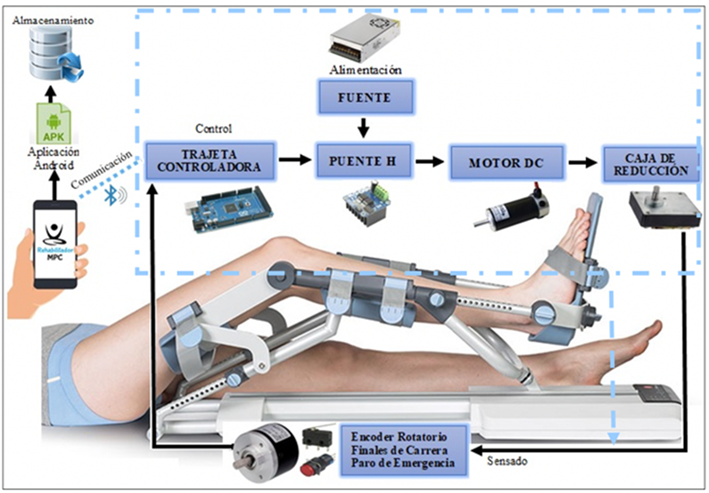
En la figura 1 se aprecia la consolidación general del prototipo de rehabilitación que con una aplicación móvil que permite ingresar al modo manual en donde se elige la velocidad que se requiera para la rehabilitación, y al modo automático donde se hace el registro de los datos del paciente y sus respectivas rutinas, la aplicación móvil se encarga de enviar los datos necesarios mediante Bluetooth a la tarjeta controladora, en la cual se procesa dicha información para iniciar con el proceso de rehabilitación mediante la transmisión de movimiento rotatorio del motor a un desplazamiento a movimiento lineal por medio del tornillo de potencia, para ello se realiza la lectura de la señal de un encoder rotativo, de dos finales de carrera y en caso de algún siniestro se podrá pulsar los paros de emergencia que están ubicados estratégicamente.
El desarrollo del prototipo de rehabilitación se realizó en tres etapas:
Diseño mecánico del prototipo de rehabilitación
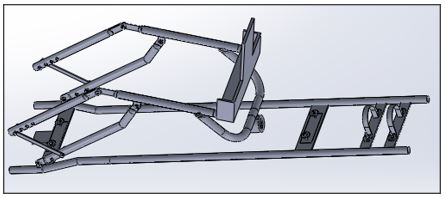
En la primera etapa se utilizó el software Solidworks 2018. En la figura 2 se pueden observar las barras que soportan el miembro inferior. Consta de dos barras paralelas para soportar el muslo, estas barras se unen por medio de tornillos a las dos barras paralelas para soportar la pierna y al final se une con la tuerca que es accionada por el tornillo de potencia para producir el movimiento flexión-extensión. También, se une un posapié el cual permite variar su longitud de acuerdo con la medida antropométrica del paciente. Adicionalmente, se tiene dos barras, las cuales se acoplan a la estructura base para darle robustez al dispositivo y evitar que se produzca un movimiento en sentido contrario.
Para los cálculos del tornillo de potencia se utilizó un paso de 0.2in = 0.00508m, y aplicando fórmulas se tienen los siguientes parámetros:

𝑒 = ℎ = 0,5 ∗ 𝑝 = 0,5 ∗ 5,08 = 2,54𝑚𝑚 = 0,1𝑖𝑛
𝑑 = 𝐷 − 2ℎ = 25,4 − 2 ∗ 2,54 = 20,32𝑚𝑚 = 0,8𝑖𝑛
Donde:
D |
diámetro exterior del tornillo |
p |
paso del tornillo |
e |
espesor del filete, en el tornillo |
h |
altura del filete, en el tornillo |
d |
diámetro interno del tornillo o diámetro de fondo |
Los parámetros de la tuerca son:
Además, para elevar la masa de un miembro inferior se necesita calcular el par torsional para hacer girar el tornillo tanto en elevación como en descenso. En la figura 3 se puede observar un tornillo de potencia con rosca cuadrada simple, la tuerca, la fuerza ejercida y de reacción (BUDYNAS y KEITH NISBETT, 2014).
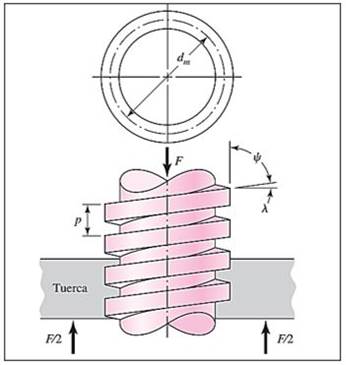
Donde
ψ |
ángulo de hélice |
λ |
ángulo de avance |
dm |
diámetro medio o diámetro primitivo |
F |
suma de todas las fuerzas axiales que actúan sobreel tornillo |
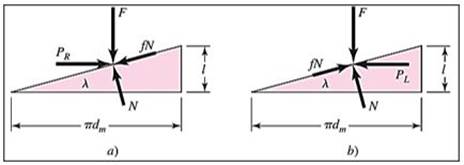
En la figura 4 se puede observar el diagrama de cuerpo libre cuando el tornillo se enrolla y desenrolla en una vuelta (Budynas y Keith Nisbett, 2014), en donde:
PR |
para elevar la carga, fuerza que actúa a la derecha |
PL |
para bajar la carga, fuerza que actúa a la izquierda (figura 4 b) |
fr |
fuerza de fricción = fN |
El sistema está equilibrado bajo la acción de estas fuerzas, para elevar la carga, se tiene:
Para bajar la carga se tiene:
Primero se despeja las ecuaciones 1, 2, 3 y 4, luego se divide el numerador y el denominador de las ecuaciones obtenidas, entre coseno λ y se emplea la relación λ=l/πd m el cual se obtiene al aplicar la razón trigonométrica tan λ, entonces se tiene:


Por último, el par de torsión es igual a d m /2 y reemplazando en las ecuaciones 5 y 6 se obtiene:


El tornillo de potencia es de rosca con diámetro medio de d m =0,9in, con un coeficiente de fricción de 0,18 y soporta un peso máximo de 24Kg debido a que el porcentaje del total de la pierna es de 16% del cuerpo humano. Y reemplazando estos datos en las ecuaciones 7 y 8 se obtiene valores de torque de torsión de subida y bajada respectivamente:
𝑇𝑅 = 0,68275Nm
𝑇𝐿 = 0,29001Nm
Para hacer girar el tornillo de potencia se necesita utilizar cojinetes, para ello se requiere calcular el par de torsión necesario de la siguiente forma:

Donde
𝑻𝑪 |
Par de torsión del cojinete |
F |
Fuerza aplicada |
𝒇𝑪 |
Coeficiente de fricción del cojinete |
𝒅𝒎 |
Diámetro medio del cojinete |
De su aplicación se obtiene que el par de torsión del cojinete es 0,40350Nm.
La velocidad lineal máxima de la tuerca del tornillo de potencia es de 2cm/s y mediante este dato se calcula las RPM a las que gira el motor, para ello se realiza una analogía pues en una revolución la tuerca se desplaza la distancia de paso de la rosca, entonces se tiene:

Para calcular la potencia mecánica que se necesita, se debe sumar el valor de las ecuaciones 5 y 6:

Aplicando la ecuación se determina que el valor del torque es 0,9727Nm
Después se procede a aplicar la fórmula:

De la ecuación se obtiene que la potencia requerida es 0.0323HP.
Para calcular el torque del motor primero se determinó la eficiencia es 0,1954, la cual fue calculada mediante la ecuación 12.

Al sumar el torque de subida más el torque del cojinete y esta respuesta se divide para la eficiencia, y se obtiene aplicando la ecuación 13 un torque de motor de 7,45Nm.

También se usó una caja de reducción con engranajes helicoidales para disminuir la velocidad de entrada, para aumentar el torque de salida y dos chumaceras a los extremos para dar apoyo al tornillo de potencia.
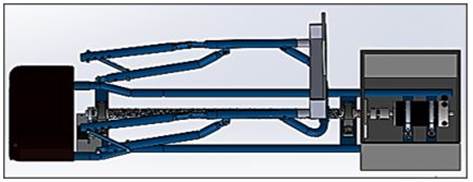
El material seleccionado para la estructura es acero suave pues se puede conseguir fácilmente en el mercado a un precio aceptable. En la figura 5 se aprecia el diseño del prototipo terminado, consta de la base de la estructura, de las barras tanto para el muslo y pierna, un tornillo de potencia, el cual está unido a la caja de reducción y mediante un acople flexible al eje del motor, además en sus extremos están las chumaceras, por último, se tiene una caja de control la cual contiene al motor.
Diseño electrónico del prototipo de rehabilitación
La segunda etapa es el diseño electrónico, para lo cual se empleó un Arduino MEGA 2560 para controlar los datos y señales recibidas, un módulo Bluetooth para la comunicación inalámbrica el cual permite el enlace con un dispositivo móvil a través de una aplicación desarrollada en el software Android Studio 3.5, un encoder rotatorio incremental MCT38A como sensor generador de pulsos con el fin de conocer con exactitud la posición y el sentido de giro del tornillo de potencia. Un motor AMP Flow A28-400 para producir el movimiento giratorio, un Driver BTS7960 que soporta altas corrientes y se puede dar órdenes al motor controlando así su velocidad y dirección, un contactor MC-22b para evitar el consumo eléctrico innecesario por parte del motor cuando no se está realizando la terapia de rehabilitación, dos finales de carrera y tres paros de emergencia ubicados estratégicamente. Finalmente, todo el prototipo se alimenta con una fuente de 12V a 20A.
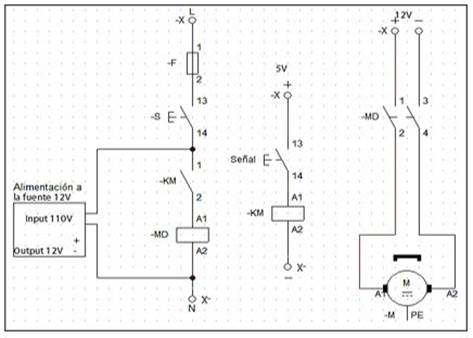
Las conexiones del prototipo constan de dos partes: la parte eléctrica y la parte electrónica. En la figura 6 se puede apreciar la parte eléctrica. Consiste en un fusible de protección, un switch, el cual enciende todo el dispositivo, además energiza al relé que activa la bobina del contactor cuando el microcontrolador le manda una señal en alto, para alimentar al motor, el cual está siendo controlado mediante un puente H.
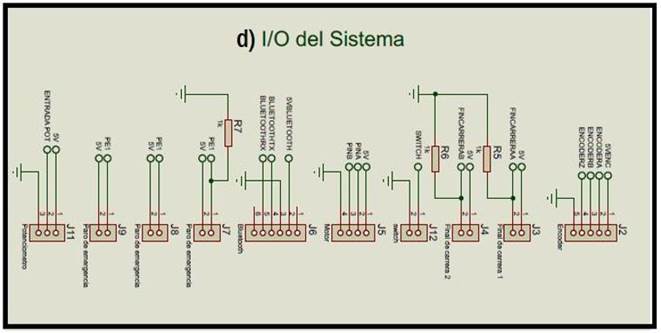
En la figura 7 se puede apreciar el diagrama de conexión electrónico, este se realizó por medio de software (Proteus 8.8).
Este esquema consta de varias etapas. La primera etapa constituye la protección de la placa electrónica tanto para corto circuitos como para la inversión de polaridad y la regulación de voltaje para los elementos que necesitan 5V de alimentación.
La segunda etapa se encarga de la energización del Arduino mega con 12V, GND y la conexión con las entradas y salidas según se indica a continuación:
El encoder rotativo se alimenta con 5V y GND, para el funcionamiento se conecta la fase A, B, Z a los terminales 2, 3, 4, respectivamente, a las entradas digitales del Arduino.
Los finales de carrera se energizan con 5V y están conectados a los terminales 5 y 6 del Arduino.
El control del motor, el cual es ejercido por el driver necesita de cuatro terminales, uno para la alimentación con 5V, otro para GND y los terminales que controlan la dirección y velocidad. Estos terminales son RPWM conectado al terminal 8 y LPWM conectado al terminal 9 del Arduino.
Los leds indicadores se conectan a los terminales 10 y 11 de la tarjeta controladora y a GND.
Los paros de emergencia se conectan en paralelo al terminal 7 del microcontrolador y se energizan con 5V.
El módulo Bluetooth se alimenta mediante el regulador de 5V del Arduino y GND, se conectan los terminales Rx y Tx a los terminales 18 y 19, respectivamente. Estos son los terminales de comunicación serial.
El switch el cual permite cambiar la manera de utilizar el prototipo, de modo manual a modo inalámbrico, se conecta al terminal 16 del Arduino.
El potenciómetro que funciona al activarse el switch del terminal 16, es decir en modo manual, se conecta a 5V, GND y a la entrada analógica A0 del Arduino.
El circuito que activa al relé se conecta al terminal 12 del Arduino.
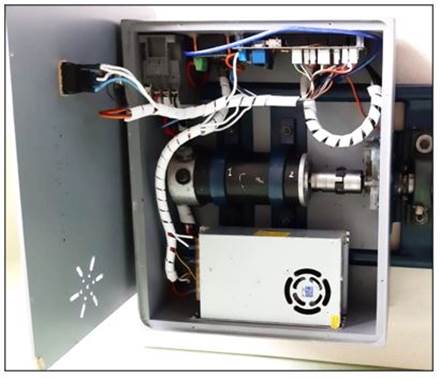
En la figura 8 se puede apreciar el gabinete de control, se muestra la conexión de cada elemento seleccionado.
Diseño del software del prototipo de rehabilitación
El software del prototipo de rehabilitación consta de dos partes: el programa para el controlador y para la aplicación móvil.
El controlador se programó por medio del software libre Arduino 1.8.1. Se declara y asigna valores a las variables globales, se configura las entradas y salidas, se inicializa la comunicación serial tanto de la consola de Arduino y el puerto serial para la comunicación del módulo Bluetooth con el dispositivo, se realiza la lectura de los sensores para comprobar su correcto funcionamiento, después se definen las funciones:
void setup () |
Define si las variables declaradas son entradas o salidas |
void loop () |
se encarga de llamar a todas las funciones según se necesite, esto se realiza de forma lineal |
void potenciómetro () |
habilita el funcionamiento manual mediante la manipulación de un potenciómetro |
void FinCarrera2 () |
regresa a la posición inicial para indicar al encoder que se encuentra a cero grados |
void ModoAuto () |
recopila la lectura de datos enviados por Bluetooth, los cuales son el ángulo inicial, ángulo final, velocidad y las repeticiones. Estos datos los procesa y controla la rutina de rehabilitación mediante los datos obtenidos del encoder y finales de carrera |
void encoder () |
cuenta los pulsos que genera el encoder y los transforma en grados para controlar los ángulos |
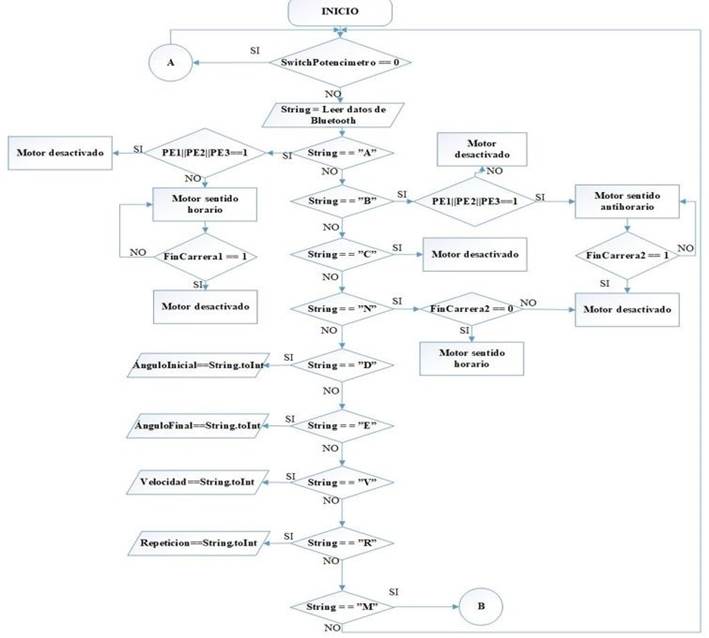
En la Figura 9 se observa el diagrama de flujo de la programación del microcontrolador Arduino.
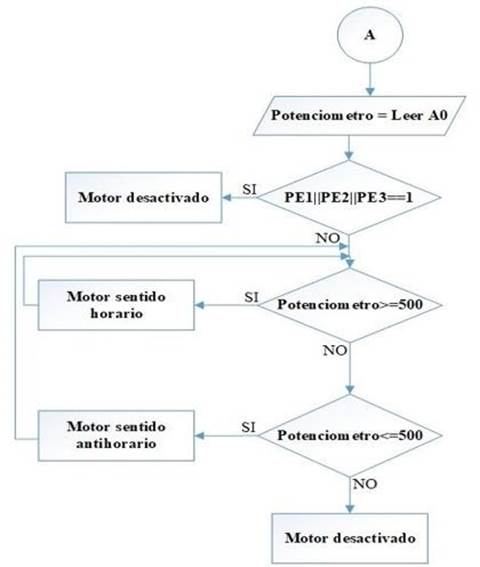
En la Figura 10 se muestra el diagrama de flujo de la función del potenciómetro.
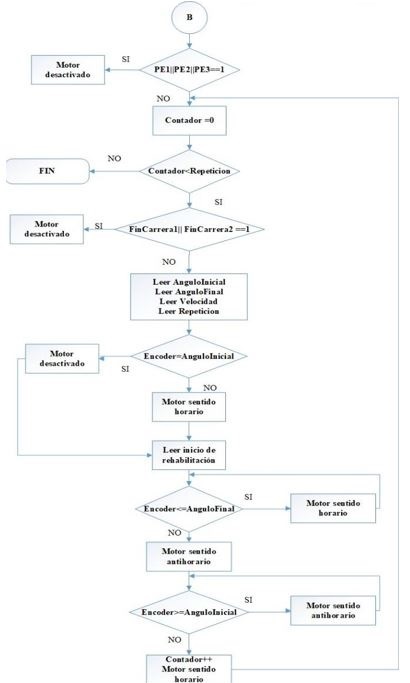
En la Figura 11 se presenta el diagrama de flujo para la programación del modo automático.
La programación de la aplicación móvil se realizó mediante el software Android Studio 3.5. Consta de dos modos de operación; el primero realiza el movimiento flexión-extensión por medio de botones y la manipulación de una barra deslizadora para variar la velocidad y el segundo, permite registrar los datos del paciente y las rutinas de rehabilitación en una base de datos local para iniciar con el proceso de rehabilitación.
Las librerías y funciones utilizadas en el desarrollo de la aplicación móvil se detallan a continuación (Cancela y Ostos, 2010):
android.util: contiene las clases de bajo nivel, estos son: contenedores especializados, formateadores de cadenas y de análisis XML de servicios público.
android.os: paquete de sistema operativo, permite el acceso a los servicios básicos.
android.text: herramientas de procesamiento de texto para mostrarlo y analizarlo.
android.database: proporciona las clases de bajo nivel necesario para la manipulación de cursores cuando se trabaja con bases de datos.
android.content: contenido de la API (Aplication Programming Interfaces) se utiliza para administrar el acceso a los datos y a la publicación, proporcionando los servicios para hacer frente a los recursos, los proveedores de contenido y los paquetes.
android.widget: construido sobre el paquete de Vista, elementos de la interfaz de usuario para su uso en las aplicaciones. Se incluyen listas, botones y diseños.
android.app: incluye la actividad de servicios y las API que forman la base de todas sus aplicaciones.
android.bluetooth: proporciona el acceso a la plataforma hardware, incluyendo Bluetooth.
Para guardar los datos se usó SQLite, es un motor de base de datos ligero, no necesita de un servidor ya que guarda los datos en un único fichero y además Android incluye un soporte a SQLite, el cual se implementa como una librería C, en lugar de ejecutarse en un proceso propio. Esto reduce dependencias externas, minimiza la latencia, y simplifica procesos como la sincronización (Ciencia de la Computación e IA, 2012).
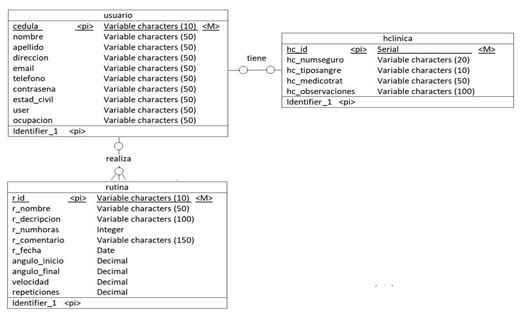
En la figura 12 se observa la estructura de la base de datos, consta de tres tablas con la finalidad de almacenar la información de paciente, su historia clínica y su respectiva rutina de terapia.
Las pantallas de la aplicación móvil se pueden observar en las figuras: 13, 14 y 15.
En la figura 13 a , se elige entre: el modo manual para realizar el movimiento flexión, extensión y detenerse mediante los botones como se muestra en la figura 13 b. En la opción de registrarse se ingresa toda la información del paciente y luego se procede al inicio de sesión como se observa en la figura 13 c.

En la pantalla perfil de paciente hay un calendario, como se observa en la figura 14 a, el cual permite programar las rutinas de rehabilitación como se aprecia en la figura 14 b, por último, en la pantalla modo automático como se muestra en la figura 14 c, se tiene botones para realizar el envío de cada uno de los parámetros y los botones inicio y detener para controlar la rehabilitación.

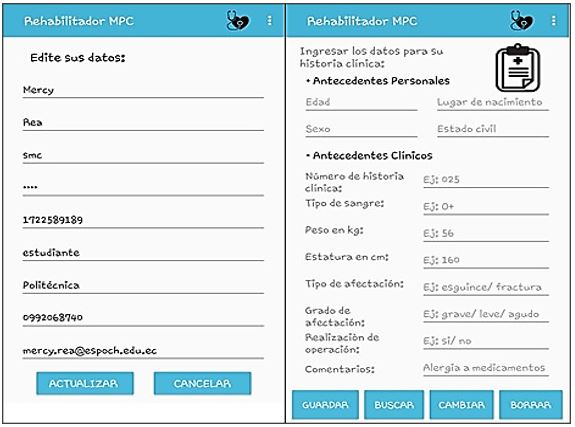
En la figura 15 se observa las opciones que se despliegan mediante el botón flotante de la pantalla perfil de usuario, estas son: editar información y llenar la historia clínica del paciente.
Validación del encoder en modo manual
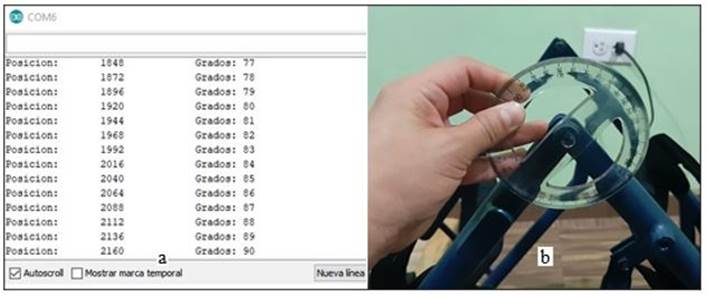
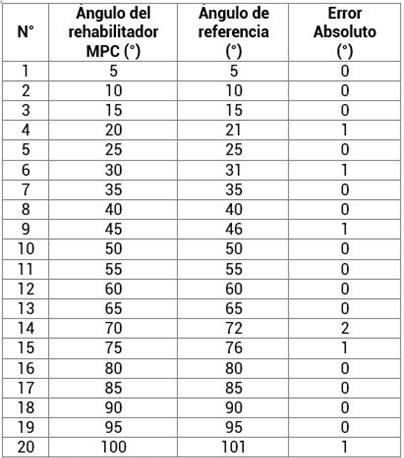
Con el propósito de determinar los ángulos de desplazamiento se realiza una captura de datos enviados por el encoder, el cual permite apreciar la posición actual y el recorrido que debe realizar para obtener dichos ángulos. En la tabla 1 se puede observar la medición de los ángulos sin la presencia de un paciente, estos datos se obtuvieron estando en el modo manual de la aplicación móvil. Para el ángulo deseado se usa la consola serial de Arduino como muestra la figura 16 a, y el ángulo real se lo midió manualmente por medio de un graduador como se observa en la figura 16 b.
Esta prueba consiste en comparar el valor de ángulo apreciado por la consola de Arduino con el valor que se obtiene tras la medición, para ello se utilizó una muestra de 20 valores y se los tomó cuando se ejecutó el modo manual desde el dispositivo móvil, al 50% de la velocidad máxima. En la tabla 1 se aprecia un error absoluto en seis valores, se observa que el error máximo es de dos grados.
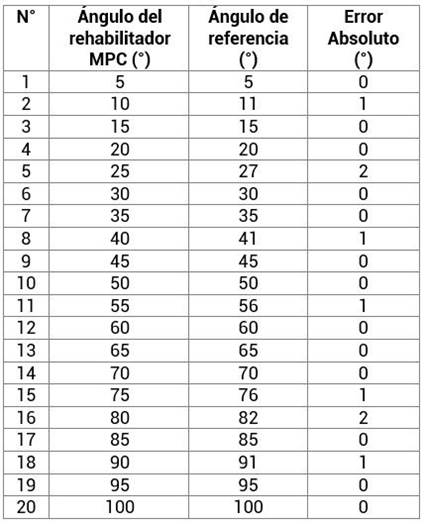
En la tabla 2 se puede apreciar la medición de los ángulos con la presencia de un paciente. Se observa un error absoluto en siete valores y el error máximo de dos grados. Se determina que el prototipo funciona con la misma exactitud tanto con pacientes como sin paciente, además según la evaluación de expertos no afecta en el proceso de rehabilitación lo que le hace fiable para la terapia.
Validación del encoder en modo automático
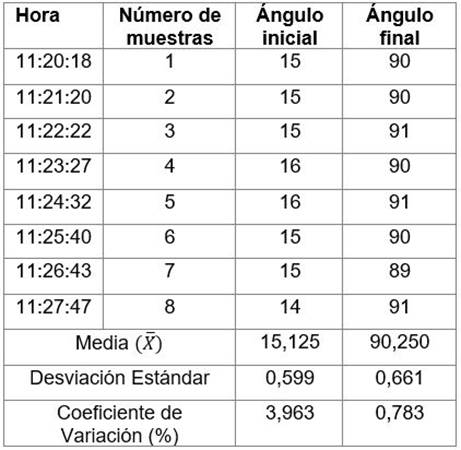
En la tabla 3 se puede apreciar la medición de los ángulos sin la presencia de un paciente, estando en modo automático la aplicación móvil, los parámetros fueron: ángulo inicial de 15, ángulo final de 90, velocidad de 1cm/s y ocho repeticiones. Estos datos presentan un coeficiente de variación de 3,963% para el ángulo inicial y 0,783% para el ángulo final.
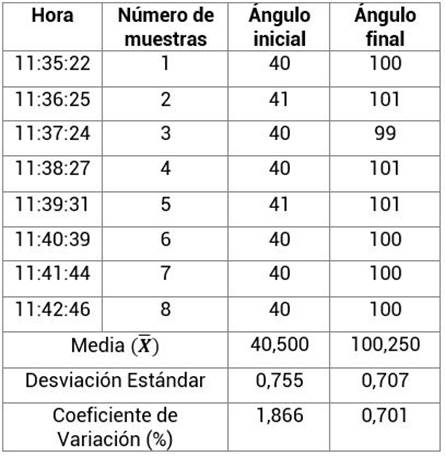
En la tabla 4 se puede apreciar la medición de los ángulos con la presencia de un paciente, estando en modo automático la aplicación móvil con los siguientes datos: ángulo inicial de 40, ángulo final de 100, velocidad de 1,4cm/s y ocho repeticiones. Estos datos presentan un coeficiente de variación de 1,186% para el ángulo inicial y 0,701% para el ángulo final.
De acuerdo a los valores obtenidos en la tabla 3 y 4, se concluye que el coeficiente de variación tanto del ángulo inicial y ángulo final, con y sin la presencia de un paciente, se encuentra entre los límites permitidos pues es menor al 10% (Romero, 2012).
Evaluación del envió de datos
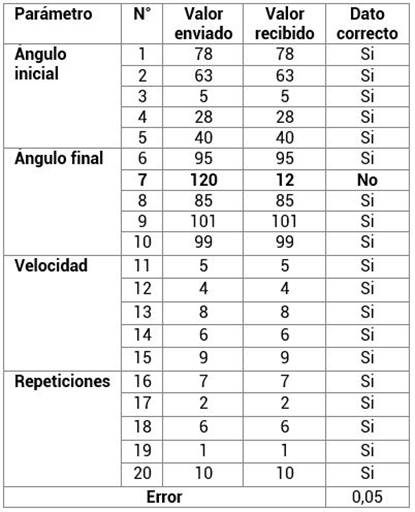
Esta prueba consiste en enviar los datos cuando se está trabajando en modo automático de forma inalámbrica a diferente hora, en la tabla 5 se puede observar que hay cinco valores para cada parámetro. Se determina que de todos los parámetros enviados se obtuvo un solo error en el ángulo final el cual representa un error absoluto de 0,05% mismo que se encuentra dentro en rango de la tasa admisible pues es de 0,1% (Core, 2001).
Evaluación de la conexión a Bluetooth
La conexión Bluetooth permite realizar el envío de datos para el funcionamiento del prototipo. En la tabla 6 se puede apreciar las distancias a las cuales se realizó la conexión, esta prueba se la hizo con barreras pues el módulo Bluetooth se encuentra dentro de la caja de control.
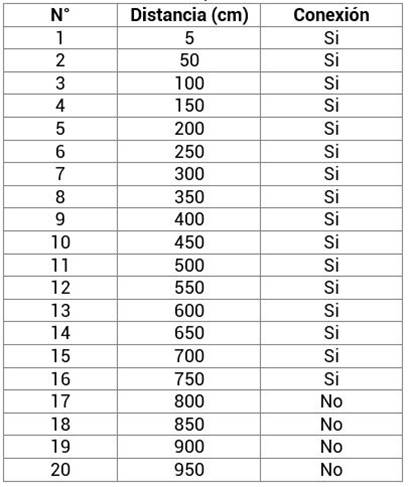
La conexión entre dispositivo móvil y el módulo Bluetooth se realiza hasta 7,5m, lo cual es suficiente ya que la terapia se realiza en un lugar cerrado de 3*3m según expertos en terapia de rehabilitación.
Grado de aceptación del prototipo
Después de concluir las pruebas de funcionamiento del prototipo, se realizó sesiones de fisioterapia con el fin de medir el nivel de aceptación en los fisioterapeutas y pacientes del Centro de rehabilitación, fisioterapia y kinesiología “CENREFK” de la ciudad de Riobamba como se observa en la figura 17.

Luego de ser aplicada la terapia de rehabilitación al paciente, se realizó una entrevista tanto al paciente como a los fisioterapeutas. Para esta prueba se aplicó la escala de Likert, con el fin de conocer el grado de satisfacción, obteniendo los resultados de la tabla 7:
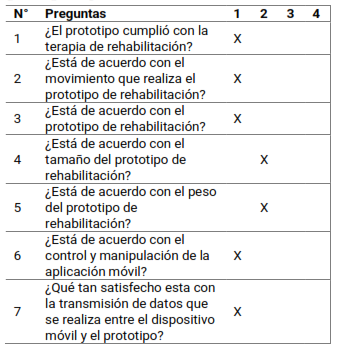
Después de analizar los resultados obtenidos de la entrevista, se determinó que el prototipo de rehabilitación presenta un alto grado de aceptación por parte del paciente y de los fisioterapeutas, pues este dispositivo ayudó a realizar la terapia de rehabilitación, además permitió guardar los datos del paciente y su rutina de rehabilitación en la base de datos del dispositivo móvil.
Conclusiones
Se desarrolló un prototipo electrónico para la rehabilitación de rodilla, el cual es controlado por medio de una aplicación móvil. Esta contiene una base de datos en la que se almacena la información del paciente y la terapia que debe cumplir, su funcionamiento está basado en desplazarse desde 0° en extensión a 120° en flexión a una velocidad elegida por el paciente y el número de repeticiones que se desee.
El resultado de la evaluación del encoder en modo manual muestra un error máximo de 2° con y sin la presencia de un paciente, lo cual, según expertos, no afecta el proceso de rehabilitación lo que le hace fiable para la terapia.
Al evaluar el prototipo en modo automático se obtuvo un coeficiente de variación tanto del ángulo inicial y ángulo final, con y sin la presencia de un paciente, entre los límites permitidos pues el valor máximo que se obtuvo fue de 3,963% lo cual es menor al 10%.
Las pruebas de transmisión de datos determinaron que el dispositivo móvil puede controlar al prototipo a una distancia máxima de 7,5m siendo suficiente pues las terapias se las realiza en un lugar cerrado de 3*3m de dimensiones.
La aplicación móvil permite la transmisión de datos mediante Bluetooth con un margen de error de 0,05% el cual se encuentra dentro en rango de la tasa admisible pues el valor permitido es de 0,1%.
Se concluye que el prototipo consume poca energía en comparación a otros electrodomésticos utilizados en el hogar.
Al hacer una comparación con equipos comerciales de similares características se establece que el prototipo implementado resulta ser más económico en un 27,83% y que además cumple con los objetivos planteados al inicio de la investigación.
Se observó que el prototipo tiene un alto grado de aceptación ya que para el fisioterapeuta es un gran apoyo tener este tipo de herramientas, ya que le permite tener un mayor control de la rutina a realizarse y del progreso que tiene el paciente.

